
���ڶ�Agent�ķֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ
�¼���1������Ƽ2��������1, 2���¹���1
(1. ���ϴ�ѧ �Զ���ѧԺ������ �Ͼ���210096��2. C4ISR���������Ƽ��ص�ʵ���ң����� �Ͼ���210007)
ժ Ҫ��
ͳ��һ���ֲ����칹����ɢ��ϵĸ��ӷֲ�ʽ�˹����ܿ���ϵͳ�����ڶ�Agent��Эͬ����ϵͳ��ʵ��������սָ�ӿ���ϵͳ����Ч������ͨ���о���ͳ����ս����ģ�ͣ���Agent������ʵʱ��սָ�Ӿ����еĿ����Խ��з���֮������˻��ڶ�Agent��Эͬ��ս����ģ�ͣ����Է������ܾ���֧��ϵͳ���г�����ƣ��������þ���ģ����ʵʱ��ս�����е���Ӧ�Ժ;���Ч�ʡ�
�ؼ��ʣ�
Эͬ������ָ�ӿ�����������������Ӧ����
��ͼ����ţ�E072 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0841-06
Distributed intelligent air-defense command and decision system based on multi-agent
CHEN Ji-zhen1, LI Yu-ping2, LI Shi-hua1, 2, ZHANG Guo-bao1
(1. School of Automation, Southeast University, Nanjing 210096, China;
2. National Key Laboratory of Science and Technology on C4ISR, Nanjing 210007, China)
Abstract: Air-defense command and decision system is a distributed, heterogeneous, loosely coupled, and complex artificial intelligent control system. Collaborative decision-making based on multi-agent system is an effective way to achieve joint operational command and control system. By studying the traditional combat simulation model, a coordinated operation decision model was proposed based on multi-agent, and the intelligent air-defense decision support system framework was given. Finally, the adaptability and decision-making efficiency of the decision-making model in real-time combat environment were analyzed.
Key words: cooperative air defense; command and control; multi-agent system (MAS); adaptability
���ź��ռ����ķ�չ����Ϣ�������µ��ִ�����ָ����Ϊһ����̬�ĸ��Ӿ��߹��̣����ֳ���ս������������½��ս���ռ��ά��ǿʵʱ�Ե�����[1]��δ���Ŀ�ս���������ص㣺
(1) Ⱥ���ԡ��ִ�ս���ɵ�����սת��Ϊ�����������ս��ָ�Ӿ��߽�Ҫͨ�����߳�ԱЭ����ɾ����ж���
(2) �ֲ��ԡ�ͨ�ż����ͺ��ա����������ķ�չʹ�ִ�ս����һ��������ˣ���սϵͳ�����ֿռ��ϵķֲ��ԡ�
(3) ʵʱ�ԡ����ս�ָͧ��ϵͳ�ڵз�����֮�����ں̵ܶ�ʱ����������ܺͷ����ľ��ߣ����ϵͳ��������ʵʱ�Ե�Ҫ������ҷ����������Եĺ����
(4) ��̬�����ԡ��ִ���սͨ�������ڹ����Ŀռ��У�����ָ��ϵͳ������Ӧս�������ı仯��
�ִ�����ָ�Ӿ��߸ı��˴�ͳ����ս��ʽ��ͻ���˴�ͳս��ʱ��Ϳռ�����ơ�����ָ�Ӿ����Զ�������Ϊδ��ս������������[2-3]��������ƽ̨Ϊ���ĵĴ�ͳ��սϵͳ�����������սϵͳ��ƽ̨����ս����������ս�Ĺ��ɡ�ƽ̨����ս��ս����Ϊ��Ҫ������ƽ̨�����У���ƽ̨����ָ����ս��Ԫ����ս������ȡս����Ϣ�����ŵ���������ʵʩ������ս����ս���仯����ʵʱ��Ӧ�����ǣ�ƽ̨����ս�����˸�ƽ̨֮���Э������Ϣ�Ĺ��������Ĵ���ϵͳ��Դ������[4-5]ָ������ͨ�ż����ķ�չʹ������սƽ̨֮��Ĺ��ɳ�Ϊ���ܣ�ͨ��ϵͳ��ͳ��ָ�Ӿ��ߣ�Э��ϵͳ��Դ���䣬���C4ISRϵͳ�е�ָ�ӡ����ơ�ͨ�š����㡢�鱨�����ӡ�����һϵ��������ˣ���ν���һ����Ч��ͨ�Ż��ƺ�Э�����Ƴ�Ϊ�����������о��ص㡣����[6]����ִ���ս�����ӵ����֡���ͬ��ս������������ս�Ĺ��ɽ������о������������ս�Ķ��壺��Ը���ս������������һ��������ɾ���������ijһ������Ϊս�ֵ��쵼�ߣ��������ֽ��������ս��ͨ��ͨ�����罫��ս����������������������ս���쵼��ͳһ����Э��ָ�ӡ�����[7-9]ָ����ͳ�ķ��վ���֧��ϵͳ������ǽ�������ѧ����֮�ϵ�ģ�͡�������ģ���ǻ���Lanchester���̵�C4ISRϵͳ����ģ�ͣ��Լ�����ϵͳ����ѧ��C4ISRϵͳ�ַ���ģ�͡�����ģ��������ս���еĸ���̬�Ʊ仯ʱ���ھ����ԣ�ֻ��ͨ����Ϊ������Lanchester���̵����ϵ�����ı�ս�֣����ǣ����̻�ս����ս���仯�Լ�������ս�����ж�־�������Ⱦ������ض�ս�ֵ�Ӱ�졣
���Ľ���Ҫ�о����ڶ�Agent �ķֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ��ͨ���Է���ָ�Ӿ��߹��̵ķ���������Agent�������뵽����ָ�Ӿ���ϵͳ���������Ӧ��ս�ĵ�������Agent��ɽṹ�Ϳ���ģ�ͣ����Эͬ���վ��߹����и���ս��Ԫ֮�����Эͬ�Ĺؼ����⣬����ս�����Ա����Ϊ���������壬����������ϵͳ�滮�����һ������Эͬ���վ��ߵĶ�������ͨ���������磬�ڽ���ͨ�ųɱ���ͬʱ��Ч�����������֮���ͨ��Ч�ʡ����Ը÷ֲ�ʽ���ܷ�������ָ�Ӿ��߿�ܽ�����ϵͳ��Ӧ�Ժ;���Ч�ʷ�������ܷ�����
1 ����ָ�Ӿ��߷���
�ִ�������ս�����״�������ǵ��鱨��Դ��ʹ��ս�������ؿյ�����������һ�������������������з��Ŀ���Ϯ����������ָ�Ӿ��߹��̷�ΪĿ��ʶ�����в���ơ�ָ�Ӿ��ߡ�Ŀ�����Э�����䡢����ִ��4�����֡���ͼ1��ʾ��
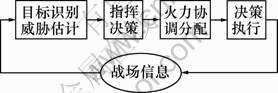
ͼ1 ����ָ�Ӿ��߹���
Fig.1 Air defense command and decision process
Ŀ��ʶ��������ָ�Ӿ��ߵ�ǰ�ᡣͨ��Ѳ��Ԥ�����ռ��״���������鱨��������Ϣ�ںϴ������жϿ���Ŀ��ĵ������Ժͻ��ͣ�Ϊ����������Ϊ���»�������в����Ҳ��Ϊ̬�ƹ��ƣ���Ҫ������ͨ����һ�����ó��Ľ���жϺ�Ԥ��л���Ҫ�������ҷ�Ŀ�ꡢ�ﵽ�ҷ�Ŀ�걻���������ʱ���Լ��ҷ���Ŀ�������в�̶ȣ��Ǻ���Ŀ���������ľ������ݡ�
ָ�Ӿ�����������ս����������Ҫ�Ļ��ڡ���������Ҫ���ݼ�������ս���ӱ�ѡ������ѡ��������ս�����������ƶ���ս�ƻ���
���������ǽ���������ȸ������߹��ߣ��������˫��������װ���ϵ�ʵ���Աȣ����ü������Ĺ�����Դ�Զ���з�����Ŀ�������Ч���أ��ﵽ��������������ѷ��䡣
����ִ����ָ�Ӿ���ϵͳ���ݾ�����ѡ�����ս������̬�ƹ��ƣ���սϵͳѸ�ٽ��м��㣬�γ���սָ�����ͨ�����紫�䵽��ս��Ԫ����ս��������ͧ�ȡ�
���ſ�ѧ�����ھ����е�Ӧ�ã��߿Ƽ������ͱ����Ķ�����ʹ�ִ�����ָ�Ӿ���������һϵ�и������⡣����ս�������ĸ����ԺͶ����Эͬ��ս������ս�ֵ��Ѷ�Խ��Խ��������Щ�仯��ָ��������˸��ߵ�Ҫ�����������ϵͳ��ָ�Ӿ���֧��ϵͳӦ�˶�����
2 ָ�Ӿ���֧��ϵͳ��������
Agent��������MIT�����������ѧ�Ҽ��˹�����ѧ�ƴ�ʼ��֮һMinsky����ģ����ġ�Society of Mind��һ�齫����������Ϊ�����������ϵͳ����Ϊ����Agent��ָ����ijһ���������У�����Ӧ����Ӧ�����仯���������ز�ȡ�ж���ʵ����ȶ�Ŀ�������ʵ�塣�ڲ�ͬ��Ӧ������Agent���Ų�ͬ�Ķ���[10-11]������Agent��������õ������ѧ�ߵ��Ͽɣ�������ΪAgent������4������������
(1) �����ԡ�����Agent��һ������������ʵ�壬�ڲ���Ҫ���ĸ�Ԥ��ֱ�ӽ��������£�Agent�ܹ�����������״̬�������ⲿ����ı仯������Ӧ��
(2) ����ԡ�Agent����ͨ��ͨ��������ͬ����н��������ᴦ�ڹ����Ļ������С�
(3) ��Ӧ�ԡ�Agentӵ��������֪ʶ�⣬���Ի�ȡ�����Ϣ������Ԥ���жϣ��Ի����ı仯������ʱ�ķ�Ӧ��
(4) �����ԡ���Agent�����������ijһĿ���ָ���£�����������Ϊ��ʹ����������ϵͳ������ﵽ���
������4����������֮�⣬���Ǹ���������Agent�����˵����ԡ���ָ�Ӿ���ϵͳ�У�Agent��ӵ��ս�������רҵ֪ʶ����־�������Լ�ս���е�����Э����
�ֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ��Agent��һ��ṹ��ͼ2��ʾ����Ҫ������ģ����ɣ��û����桢��������ͨѶģ�顢����ģ�顢ѧϰģ���Լ�֪ʶ�⡣����ָ�Ӿ�����Agentͨ������������ͨ��ģ����������Ϣ��Ȼ����ͨ���ڲ��������Ϣ���з��ࡢ�ںϵ�һϵ�д����������������ģ��������Щ��Ϣ������Ӧ��������ͨ������ģ�����Ӱ����绷������ָ�Ӿ��߹����У���Agent���ϵؽ�����ѧϰ��Ϊ֪ʶ�������µ�֪ʶ�����µ�������µľ��߷��������ܽ�������������ݿ��֪ʶ��ʹָ�����ڽ�����ͬ���ľ�������ʱ�оݿ�ѭ�����ϵͳ�ڸ���δ֪�����µ���Ӧ�ԡ�
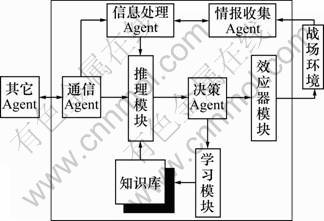
ͼ2 ����Agent�������
Fig.2 Framework of anti-aircraft agent
3 ����Agent�ķֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ
3.1 ϵͳ���
����������Эͬ����ָ�Ӿ���ϵͳ��һ���칹����ɢ��ϵĸ��ӷֲ�ʽ�˹����ܿ���ϵͳ������Ӧ�ö������弼���������Agent�ķֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ��ܣ���ͼ3��ʾ��
����ָ�Ӿ���ϵͳ�и��Խ�ɫ�IJ�ͬ��Ϊ����6����Agent���鱨Ԥ��Agent����Ϣ�ں�Agent����������Agent��ָ�Ӿ���Agent��Эͬ����Agent������ִ��Agent�����ִ�ͨ�����缼����֧���£���ϵͳ�������ִ�������ս�ڿռ������ϵķ�ɢ�Ե�Ҫ���ṩ���С�ͷֲ�ʽ����ƽ̨��Ϣ��Դ����������ʵ��Զ�̷��չ������칹Agent֮���Э��ʹ�Դ�ͳƽ̨Ϊ���ĵķ�����ϵת��Ϊ������Ϊ���ĵ�Эָͬ�Ӿ���ϵͳ��
3.2 ���ڶ�Agent�ķֲ�ʽ���ܷ���ָ�Ӿ��߲���
ָ�Ӿ��߰���������ս�ķ�����սĿ�ꡢ��ս��������սս���ȷ���ľ��ߣ���ˣ�����ʱЧ�Ժ�ȷ�Զ�ս�����̺ͽ�־�����ҪӰ�졣����ָ�Ӿ��߱���ͨ��һ��ϵͳ��������ľ��߹��̲���ʹ������ս�������ɵؽ��С�����ָ�Ӿ���������4��������ɡ�
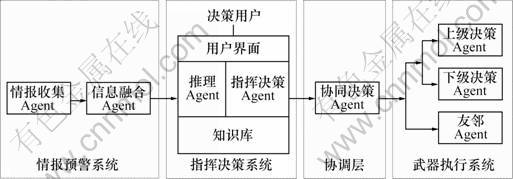
ͼ3 ����Agent�ķ���ָ�Ӿ���ϵͳ���
Fig.3 Agent-based air defense command and decision-making framework
(1) ���������γɡ���һ���߲���������鱨�ռ���Ŀ��ʶ����в���ơ����ִ�����ָ�Ӿ����У���������ϵͳ���ڱ�ս״̬���鱨Ԥ��Agent�磺����Agent��Ԥ����Agent���״�Agent����ϢԴ�Ը��Է���������С���̺ʽ����̽����������ͨ��Agent֮��Ľ�����ʵ�ֵ�λʱ����ָ�Ӿ���������Χ���� ��
(2) ���߷������γɡ������������ָ�Ӿ����ߺͼ����ϵͳ��ͬ��ɵġ���������ϵͳ����֪ʶ����������Agent�Ե�һ�������ύ�ľ��������������������������ֽ�Ϊ���������ϵ�С�����ݷ���ϵͳ���������;�������Ҫ���γɱ�ѡ���� ������
(3) ���߷������������ڳ�����ѡ�����γ�֮��ָ������������ϵͳ���վ���Ҫ��ѡ��һ��Ч��ֵ��ߵı�ѡ������Ϊ���յ��ж�������ָ�����������߽��������±������վ��ߵijɹ��ʣ�����Ч������ӣ����վ���ʵʩ���Ѷȣ����߷�������Ӧ�ԡ�
(4) ���������Э��������ִ�С��ھ��߷�����������4�����۱�������������֮��ָ����ѡ����ѡ�����ͱ�ѡ��������������Agent��������ս����������ʵս�����������������ֽ�Ϊ����������ϵ�С�������ú�ͬЭ�������ۣ�ͨ���űꡢͶ�ꡢ�����ģʽ��С������������ϵͳ�е�����Agent��
����4�����߲����γ�����������ָ�Ӿ��ߵ�ȫ���̡�����Agent��ִ������Ĺ����У�ͨ���������Ĵ�����ģ���ռ�ս����Ϣ���ύ���鱨Ԥ��ϵͳ�������ݿ⣬ͬʱ������ִ��Ч��������ָ�Ӿ���ϵͳ���������γ���һ�������ķ���ָ�Ӿ��߹��̡�
4 ����Agent�ķֲ�ʽ���ܷ���ָ�Ӿ���ϵͳ���ܷ���
����ڴ�ͳ����ƽ̨Ϊ���ĵķ���ָ�Ӿ���ϵͳ��Gerhard[12]�Էֲ�ʽ���˹����ܾ��������˳����о�����������Ļ���Agent�ķֲ�ʽ����ָ�Ӿ���ϵͳ��ϵͳ����Ӧ�Ժ;���Ч�ʵ����ܷ��������������ơ����潫����2��������ܶ�ָ�Ӿ���ϵͳ���� ������
4.1 ��Ӧ����
����ָ�Ӿ���ϵͳ����Ӧ����ָ����Զ�̬�仯��ս�������Լ�����Ŀ��ı�ʱ��ϵͳ��������ʱ����������Ӧ�������Ҫ���ϵͳ��Agent��ѧϰ������ϵͳ����Ӧ����Ҳ������Agent��֪ʶ���ϣ�Ҫ���ϵͳ����Ӧ��������Ҫ���ϵͳ�ھ��߹����е�ѧϰ������
4.1.1 Agent��ѧϰ����
���ڶ�Agent�ķ���ָ�Ӿ���ϵͳ�и�Agent��ѧϰ�Ĺ����У������ij���ض��ķ�������Ϊ��ͬĿ�ꡣ��ˣ�����ϵͳ�и�Agent���ܺͰ��ݽ�ɫ�IJ�ͬ�������ϵͳ���������ǰ���£�Ŭ�������������ѧϰ����ô��ͬ��Agent���в�ͬ��ѧϰĿ���ѧϰ���������磺�鱨Ԥ��Agent���ռ�ս����Ϣʱѧϰ��ϵͳ����ϢԴ���ŵ�����£����ͨ��Agent��Э��������������Ŀն���ʵ�ֵ�λʱ��������������������Agent֮������õ��鱨Э����ϵ������ϵͳ���ġ���Ϣ�ں�Agent��Ҫѧϰ����Ϣ�ںϹ�������δ����ֲ���Ϣ�ںϺ�ȫ����Ϣ�ںϣ���Ӧ�����Ķ�̬�仯��ЭͬAgent��Ҫ��ָ�Ӿ���Agent�������ľ��߽�����ѧϰ����ѧϰ�����ȫ�ֺ;ֲ�̬���½���������䡣����Agent��Ҫѧϰ��ս�����������ѡ�����Ŀ�ꡢս��Э���Լ��������䡣
4.1.2 Agent�����˳�����
��ָ����ս�����У����Ƶ�Agent�����˳�������ʹϵͳ���õ���Ӧ��̬ս���������ڷ��վ��߾ֲ�ս����������˫��ս���������ֵ�ǿ����ʱ���Ҿ�����Agent����ָ�Ӿ���Agent����ս����Ϣ������������������Ԯ������ʵ�ֵ���˫����ս�������ϵľ��⣬�ڶ��Эͬ�Ļ����Ϲ淶Agent������ƣ�ͬʱ��ָ�Ӿ���ϵͳ����Agent�˳�����Эͬ������������ȫ��ʧ��������Ӱ�쵽���������ͨ�ź�ϵͳ���������У������Ϳ��Խ�Լϵͳ��Դ��ͬʱҲ�����ϵͳ�ڶ�̬�仯�����е���Ӧ�ԡ�
4.2 ������
����ս���Ƽ��ķ�չ��ս�����ķ����ٶ�Խ��Խ�죬��װ�������豸Խ��Խ�Ƚ���Զ�̵�����Ѳ�������Ĵ���Ӧ��ʹ���վ���ս��̬��˲Ϣ��䣬��ˣ�����ָ�Ӿ���ϵͳ�ľ���Ч����Ϊ��Ҫ�����ڶ�Agent�ķ���ָ�Ӿ���ϵͳͨ���Ż�Agent��ͨ�ź������칹����֮���Э���������ﵽ���ϵͳ�ľ���Ч�ʵ�Ŀ�ġ�
4.2.1 Agent��ͨ��
��������ڻ��ڶ�Agent�ķ���ָ�Ӿ���ϵͳ�в��û�Ͻṹ��ͨ��ģʽ����ͼ4��ʾ��
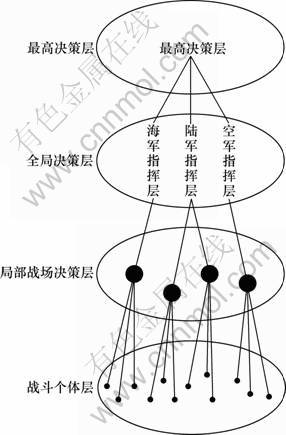
ͼ4 ����Agent�ķ���ָ�Ӿ���ϵͳͨ������
Fig.4 Agent-based air defense command and decision-making system communication network
��ͼ4���Կ���������Agent����ָ�Ӿ���ϵͳ��ȡ�ֲ�ͨ�ŵIJ��ԡ�����ϵͳ��ͨ�������Ϊ4�㣺��߾��߲㡢ȫ�־��߲㡢�ֲ����߲㡢ս������㡣����ͬ����ϵ���ս��λ��������ͨ�ţ�������������Դ���ϼ���ֱ������һ��ֱ�Ӵ������ָ�������һ����λ�������ϼ���ӳս�����������Խ��ͨ�š�����ͨ��ģʽ���Խ���ϵͳ���ģ����ϵͳͨ��Ч�ʣ��������ϵͳ���������Ч�ʡ�
����Agent��ͨ�Ų��úڰ�ģʽ����ͨѶ���鱨Ԥ��Agent��ͨ�źڰ��Ϲ����ռ������鱨���Լ���ͨ�ŵ�ַ����Ҫ�鱨�ľ���Agent����ͨ�źڰ��������Լ���Ҫ����Ϣ��������Ϣ���������������ϵ������ͬ��ͨ�����첽ͨ�����ϵͳ��ͨ��Ч�ʡ���ͼ4���Կ���������ָ��Agent���鱨Ԥ��Agent֮���ȡͬ��ͨ�ŵ�ģʽ���Ա㼰ʱ����ս����Ϣ��ָ�Ӿ���Agent��Э��Agent֮���Լ�ָ�Ӿ���Agent�������սAgent֮���ȡͬ��ͨ�����첽ͨ�����ϵ�ģʽ�����ڴ��ݾ���ָ�
4.2.2 Agent��������
����ָ�Ӿ����е�Э����2�����棺ͬ����������Э��������������֮���Э����ͬ��������֮���Э����Ҫ��ָͬ���������ڲ�֮���Э������ɸ���������屾ְ�������ռ�ս����Ϣ������Ŀ��ʶ�����в���ƣ�����Agentִ���ϲ�ָ���ߵľ��ߣ��Եз�Ŀ����й�����
�칹��������Э����ͬ����������Э����ʽ��Ϊ����������ָ�Ӿ�����ϵ�е��칹������֮���Э�����������¼�����ʽ��
(1) �״���ǡ�Ԥ����֮���Э�����鱨Ԥ��ϵͳ�е�ְ��Agent��ִ���鱨�ռ�����ʱ����Ҫ���������鱨Agent��λ���Լ�״̬��������Agent��ȡ����Эͬ��ʹ����2������Agent�������������ص��IJ������٣���ʵ��������Χ������ʱ������š�
(2) ��½����սAgent֮���Э��������ս�����У��Ӵ����ս����ʹ�õ�һ�������սAgent������ɡ�Ϊʹ��������ս�е���ʧ�ﵽ���٣�����ʹ�з�����ʧ�����սAgent��ȡ��սЭͬ�����磺����Ҫ����Զ�̹���ʱ�����ڷ��о����ԭ����������ս���������������ս����ս����Agent����ͧAgent������������ͧAgent��������������ս��������ж��Ƿ����Э������һ��Э��˫�����Э������ʵʩԶ�̹�����
(3) �鱨Agent����սAgent֮���Э������������Ƶ���սAgentͬ�������ռ�ս����Ϣ����������սAgent���Դ����鱨Agent�Ľ�ɫ���ռ�ս�� ��Ϣ��
5 ����
�ڷ��������ս��������Ļ����ϣ��о���Agent������ʵʱ����ָ�Ӿ����еĿ����ԡ��������һ�����ڶ�Agent�ķֲ�ʽ����ָ�Ӿ���ϵͳ���ڸ�ϵͳ�У������ɫ��Ϊ�鱨Ԥ��Agent����������ս������Agent ��Эͬ����Agent�ȡ��Ը�ϵͳ�ڸ���ʵʱ�����µ���Ӧ���Լ�����Ч�ʽ��������������������IJ�ͨ���������磬��ͨ�������ڽ���ϵͳ���ĵ�ͬʱ�������Agent֮���ͨ��Ч�ʣ�����ϵͳ�IJ������У�����Agentͨ��ѧϰ���ϵػ�ȡ֪ʶ������֪ʶ��������Լ��ľ���������ʹϵͳ�ľ���֧��ˮƽ�õ���ߡ�
�ο����ף�
[1] Grecu D L, Gonsalves G. Agent-based simulation environment for UCAV mission planning and execution[C]//American Institute of Aeronautics and Astronautics Guidance, Navigation, and Control Conference. Denver: Charles River Analytic, Inc, 2000.
[2] Joglekar N A. Test strategy for net-centric C4ISR system[J]. ITEA Journal, 2008, 29: 289-293.
[3] Alberts. Network centric warfare: Developing and leveraging information superiority[M]. 2th Edition. Washington D.C.: CCRP Serials Publication, 2000: 102-200.
[4] HU Xiao-feng, LUO Pi. War complexity and war gaming and simulation[J]. National Defense Science & Technology, 2007(2): 6-11.
[5] ����. C4ISR ��ϵ�ṹ����о���չ[J]. ������ָ�ӿ���, 2004, 29(3): 16-23.
HUANG Li. Advances on C4ISR architecture framework[J]. Fire Control & Command Control, 2004, 29(3): 16-23.
[6] ������. ��սָ��ǰ�������о�[M]. ����: ������ѧ������, 2000: 200.
HU Guo-qiao. Research on advanced theory of combat command[M]. Beijing: National Defense University Press, 2000: 200.
[7] ����ƽ. ½������ֺ�ͬ��ս����˹�ط��̵ĵ�ҩ����Ԥ���о�[J]. ��е����ѧԺѧ��, 2004, 16(5): 56-61.
QI Yan-ping. Ammunition consumption forecast based lanchester equation of cooperative operations with multi-arms[J]. Journal of Ordnance Engineering College, 2004, 16(5): 56-61.
[8] Starr S H. C4ISR Assessment: Past, present, and future[C]// International Command and Control Research and Technology Symposium. Washington D.C.: National Defense University, 2003: 17-19.
[9] ������, ١����. Эͬ��սָ�ӿ���ϵͳ������ģ���о�[J]. ������ָ�ӿ���, 2003, 28(2): 10-12.
LIU Jing-xing, TONG Ming-an. Study on the models of cooperative air combat command control system based-on agent[J]. Fire Control & Command Control, 2003, 28(2): 10-12.
[10] Melgar I, Fombellida J, Jevti? A, et al. Swarm architectures for ground-based air defense systems of systems[C]//7th IEEE International Conference on Industrial Informatics. Piscatuaway, NJ: IEEE Press, 2009: 783-788.
[11] Wooldridge M, Jennings N R. Intelligent agents: theory and practice[J]. Knowledge Engineering Review, 1995, 10(2): 115- 152.
[12] Gerhard W. Multi-agent systems: A modern approach to distributed artificial intelligence[M]. Cambridge, MA: MIT Press, 1999.
(�༭ Ԭ��ǰ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ�������Ƽ��ص�ʵ���һ���������Ŀ(9140C8301011001)
ͨ�����ߣ�������(1975-)���У�����Ƽ���ˣ����ڣ���ʿ����ʦ�����·�����ϵͳ�ķ������ۺ��Լ������ŷ�ϵͳ���Ʒ������о����绰��025- 83793785��E-mail: lsh@seu.edu.cn
ժҪ������ָ�Ӿ���ϵͳ��һ���ֲ����칹����ɢ��ϵĸ��ӷֲ�ʽ�˹����ܿ���ϵͳ�����ڶ�Agent��Эͬ����ϵͳ��ʵ��������սָ�ӿ���ϵͳ����Ч������ͨ���о���ͳ����ս����ģ�ͣ���Agent������ʵʱ��սָ�Ӿ����еĿ����Խ��з���֮������˻��ڶ�Agent��Эͬ��ս����ģ�ͣ����Է������ܾ���֧��ϵͳ���г�����ƣ��������þ���ģ����ʵʱ��ս�����е���Ӧ�Ժ;���Ч�ʡ�
