
����Voronoiͼ���ƶ�������SLAM�㷨
����1������־1��������1
(1. ������Ϣ�Ƽ���ѧ �Զ���ѧԺ��������100192)
ժ Ҫ��
ͬ���Զ�λ���ͼ����(SLAM)����������ڵ�ƥ��ķ�ʱ�䳤���⣬��һ�ֻ���Voronoiͼ������ڵ��㷨Ӧ�õ�SLAM�У����㷨����Voronoiͼԭ����դ���ͼ����2�κ���ɨ������õ�ͼ������դ�������ڵ㣬����˻����˽�ͼ��Ч�ʣ���������֤�˸÷����Ŀ����Ժ������ԡ�
�ؼ��ʣ�
Voronoiͼ��SLAM��ɨ��ƥ��������ڵ���
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0453-05
SLAM approach with Voronoi diagram
LI Ling1, ZHANG Qi-zhi1, ZHOU Ya-li1
(1. School of Automation, Beijing Information Science & Technology University, Beijing 100192, China)
Abstract: For the time-consuming of scan matching in the SLAM, a closest point algorithm based on Voronoi diagram is applied in SLAM. It gets the closest point with two transverse scans to improve the efficiency of mapping for robot. The simulation results prove the exactness and applicability of the algorithm.
Key words: Voronoi diagram; SLAM; scan matching; closest point
�����������ż�������������Ӽ��������缼���Ŀ��ٷ�չ���ƶ������˵�Ӧ������Խ��Խ�㷺������������ʼ�����������չ������������̽�⡢�ɾ�����ҽ�ơ�ũ��ҵ���������ֵ���ҵ������Զ����ͻ����˻���Ҫ��ͬʱ���ƶ��������ھ�����졢ɨ�����ա���ֹ����Ⱦ�ͻ�ѧ��Ⱦ��Σ������ӻ����е����ϰ��ˣ��ر�����һЩ����Σ���ԵIJ�����Ҳ���й㷺��Ӧ�á�Ϊ�˻�ø���Ķ����ԣ�����Ҳ�Ի����˵�����Լ�����������ߵ�Ҫ��,Ҫ��������ܹ���һ����Χ�������ƶ������ƶ�������������ض���������ǿ�Ի�������Ӧ����������ƶ���������İ��������ʵ��ͬ���Զ�λ���ͼ����(SLAM)�����ѳ�Ϊ�ڶ��о���Ա����ע��һ������[1]��
1 ���������˲���SLAM�㷨
����Rao-Blackwellized�����˲���SLAM�㷨[2]��ͼ1��ʾ��������㷨���£�
(1) ���ݳ�ʼ���꣬���������N������λ��s0i������ȨֵΪ1/N��ɵ����Ӽ���
(2) ����k-1ʱ�����Ӽ��е�ÿ������λ��sk-1i���˶�ģ�ͼ���kʱ������λ��ski��
(3) �������˶�ģ��������������λ�ˡ������˹۲����ݼ��۲�ģ�Ͷ����Ӽ�����ƥ�䣻
(4) ����ƥ����������Ȩֵ���и��£�
(5) ��������Ȩֵ�����Ӽ������ز�����ȥ��ȨֵС�����ӣ�����Ȩֵ������ӣ�
(6) �Ի�����ͼ���и��¡�
���㷨�е�ÿ�����Ӵ����˻�����һ�ֿ��ܵ��˶��켣��ͬʱÿһ�����Ӷ������Լ���ȫ�ֵ�ͼ������ӵĹ켣���Ӧ����˿����ܹ��Ϻõؽ����ƶ������˵�λ�˺ͻ�����ͼ�����ϸ����ܶȣ�ͬʱ����һ������Ӧ���ز����㷨�������Ӽ����������������Χ�ڣ��������ӷ�ɢ�̶ȣ��Ӷ����ʹ������˲��㷨�ĸ��Ӷȣ��ƶ����������ջ�õ�Ȩ����ߵ������������ľ����ƶ��������˶��켣��ȫ�ֵ�ͼ��

ͼ1 SLAM����ͼ
Fig.1 Flow diagram of SLAM
��SLAM�㷨�У�ɨ��ƥ�������ʱ��һ�����裬ͬʱҲ�DZ����иĽ��IJ��֡����������봫������һ����Χ�ڵ�ɨ����Ϣ�������ڴ�������֪����Ϣ�������ͼ����Ϣ֮���ҵ����϶���á�һ������õ�ƥ��[3]���Ӷ�����ȷ�����������ڵ�λ�ã�ʵ�ֶ�λ��ͬʱ����ǰʱ������һʱ�̹����ĵ�ͼ����ƥ������������ĵ���Ϊȫ�ֵ�ͼ������Ϣ��������һʱ�̵�ȫ�ֵ�ͼ��
�����в��õ�ƥ���㷨Ϊ����ICP����ĵ��������(ICP)�㷨������P={p1������ pm}Ϊ�۲�㼯��Q={q1������qn}Ϊ�ο��㼯����ICP�㷨���Ա�ʾΪ
![]()
s.t. ![]() (1)
(1)
���У�R����Rl��lΪ��ת�任����Ϊ��ת�ǣ�T��RlΪƽ����������ͨ����С������Edist���2���㼯֮����������任x=(����T)��
��ICP������ʼǰ����ҪԤ���ƶ�����������ʱ�̵ij�ʼ���λ�˱仯��������ö�ƥ����Ӱ��ܴ����ò����ʻ������㷨������������������ᵼ���㷨������ij���ֲ�����ֵ��ƥ��ʧ�ܡ������ƶ��������˶��������ԣ���ǰһʱ��ICP���������Ϊ��һʱ�̵ij�ʼ���λ�˱仯���衣����SLAM������ƥ��ģ�͵ȼ����������ҪƵ������դ���ͼ�е������ڵ㣬Ϊ�˷����ȡ���ݣ����Ľ���һ����ά������ڲ��ұ����������ھ��뼰���Ӧ�����ꡣ���ô�ͳ������ڵ��㷨ֱ�Ӽ���õ����е�ľ��롣��դ���ͼ�ߴ�Ϊn��n�����б�����(�ϰ���)����Ϊn_bʱ����ͳ�㷨�漰��ƽ���������Ϊn2��n_b��������SLAM�����к�ʱ��������ƶ������˴�����դ���ͼ[4-5]�������ռ�ķֱ�����դ��ߴ��йأ����ӷֱ��ʽ�����������ʱ��ͼ��㼰�ڴ�����[6]����˴�ͳ������ڵ��㷨�����зֱ��ʸߵĵ�ͼ������
����ͨ���������Voronoiͼ������ڵ��㷨���ɴ�����̽�������ڲ��ұ���ʱ�䣬������������SLAM�������е���ʱ�䡣
2 Voronoiͼ����
Voronoiͼ[7]�ǹ��ڿռ��ڽ���ϵ��һ�ֻ������ݽṹ(��ͼ2��ʾ)��Voronoiͼ��ƽ��ֳ�n������ÿ���������1�����㣬�õ����������ǵ��õ�ŷ����þ�������ĵ�ļ��ϡ���ƽ��㼯PΪԪ�ص�Voronoiͼ��˵��ƽ�汻����Ϊ���������P��ÿ��Ԫ��pi��Ӧһ������V(pi)��ʹ��V(pi)�ڵ��κε����pi���Ⱦ�������Ԫ�ؽ���V(pi)�������£�
![]() (2)
(2)
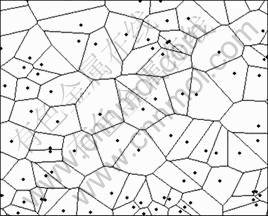
ͼ2 Voronoiͼ
Fig.2 Example of Voronoi diagram
3 ����Voronoiͼ����ڵ��㷨
3.1 ����Ͷ���[8-9]
����1 (2-Dդ���ͼ) ��R1��R2��դ���ͼgrid�е�2�㣬����˳���ϵ![]() y��
y��![]() y���£�
y���£�
![]()
![]()
![]()
![]() (3)
(3)
����1 ��ͼ3��ʾ���б�����u��v��w(ux<>x<>x),uvΪ��u���v��ֱƽ���ߴ���ֱ��y=r�ĵ㣬vwΪ��v���w��ֱƽ���ߴ���ֱ��y=r�ĵ㣬��۲�ͼ�ο�֪����uvx��vwxʱ��ֱ��y=r���v������Voronoi�������������������������������Ϊr�ĵ������ڱ�������ų���v��

ͼ3 ��uvx��vwxʱ����v��Voronoi������ֱ��y=r����
Fig.3 Voronoi region of v does not intercept line r if uvx��vwx
3.2 �㷨����[10]
����Voronoiͼ������ڵ��㷨����˼���ǣ�ֻ��ֱ��y=r(ǰ����������)������Voronoi����ı�������Ϊ����ڵ�ĺ�ѡ�㣬�Դ���߶�����ǰ����������ڵ��Ч�ʡ������������£����ȶ�դ���ͼ����![]() y˳��ɨ�裬���ǰ������ֱ��y=r�·�������ڵ㣬Ȼ���ٶ�դ���ͼ����
y˳��ɨ�裬���ǰ������ֱ��y=r�·�������ڵ㣬Ȼ���ٶ�դ���ͼ����![]() y˳��ɨ�裬���ǰ������ֱ��y=r�Ϸ�������ڵ㣬����2�εó������ŷ����þ�������Сֵ���Դ����ƣ����ɵõ����ŵ�ͼ�����е������ڵ㡣����Voronoiͼ������ڵ��㷨�������Algorithm CDT()��
y˳��ɨ�裬���ǰ������ֱ��y=r�Ϸ�������ڵ㣬����2�εó������ŷ����þ�������Сֵ���Դ����ƣ����ɵõ����ŵ�ͼ�����е������ڵ㡣����Voronoiͼ������ڵ��㷨�������Algorithm CDT()��
Algorithm CDT()
���룺դ���ͼgrid
�����դ���ͼ��ÿ���������ھ���CDT����Ӧ�ı����㼯��Closest_p
��1������դ���ͼ����![]() y˳��ɨ��
y˳��ɨ��
for i��1,nl do
F����;
if i ��2 then Cri ��Lri-1
else Cri ����;
end if
for all center p of a cell R�ʦ�ri do
if R is backgound labeled then
Cri ��Cri Ux{p};
CDT(R)��0;
else
F��F Ux{p};
CDT(R)����;
end if
end for
Lri=delete_sites(Cri );
k��1, l��size(Lri);
for all points p��F do
while(k��l) do
d��de(p,Lri[k]);
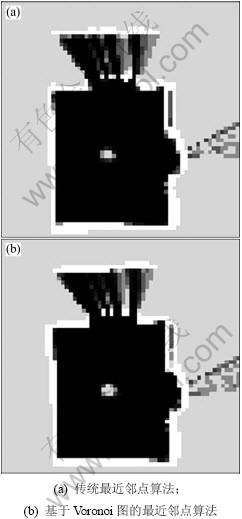
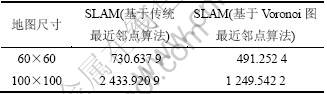
if d CDT(R)��d; Closest_p(R)��Lri[k]; else break; end if k=k+1; end while end for end for ��2������դ���ͼ���� ��Algorithm CDT()�����У�nlΪդ���ͼ���������磬�ֱ���Ϊ100��100��դ���ͼ��������Ϊ100��FΪǰ���㼯�ϣ�CriΪǰ����(������Ϊri)������ڱ�����ĺ�ѡ�㼯�ϣ�LriΪֱ��y=ri ������Voronoi����ı����㼯�ϣ�pΪդ���ͼ�еĵ㣻��ri��ʾդ���ͼ��������Ϊri�ĵ�ļ��ϣ�F Ux{p}��ʾ����p���ӵ�����F�У�Ȼ����F��������x��С��������de�������������������ŷ����þ��롣����delete_sites()ʵ�ֽ���ѡ�㼯��Cri��ֱ��y=riδ������Voronoi����ı�����ɾ�����Դ˼��ټ���ŷ����þ���ı������������ԭ���DZ����еĶ���1���ڱ��������У����㷨�ɼ���դ���ͼ��������Ϊri������ri�ĵ������ں�ѡ������������Դ����̼������е������ڱ��������ʱ�䡣 4 ʵ���� ʵ�黷����װ��SICK��˾LMS200�������ǵ��ƶ�������Sun��(��ͼ4��ʾ)��Intel(R) Core(TM) Duo CPU T2450��Ƶ 2.00GHz���ڴ�Ϊ2.00GB�ļ������Matlab����ƽ̨�� �������ݣ��ƶ���������ʵ���Ҵ���(��ͼ5��ʾ)�ɼ����ļ������ݡ� ��δ�Ľ���Ľ��������ڵ��㷨�ֱ�Ӧ�õ�SLAM�����У����ջ��Ƶĵ�ͼ��ͼ6��ʾ����ͼ6���Կ������Ľ����SLAM������Ժܺõػ��Ƴ������ĵ�ͼ�� ͼ4 �ƶ�������Sun�� Fig.4 Mobile robot Sun�� ͼ5 ʵ���Ҵ��� Fig.5 The lab hall ͼ6 2������ڵ��㷨��SLAM���н�� Fig.6 Results of SLAM with two closest point algorithms �ڲ�ͬ��ͼ�ߴ磬��դ���ͼ������ͬ�������£�2��SLAM���������ʱ��Ա����1���С��ӱ�1���Կ��������������õĻ���Voronoiͼ������ڵ��㷨��SLAM��������ʱ��ԶС�ڻ��ڴ�ͳ����ڵ��㷨��SLAM��������ʱ�䣬�ҵ�ͼ�ߴ�Խ��������Խ�� ��1 ���ò�ͬ�㷨��SLAM��������ʱ�� Table 1 Execution times of SLAM with two closest point algorithms s 5 ���� ������Voronoiͼ������ڵ��㷨���õ��ƶ�������SLAMӦ���У���Ч�ؼ�����դ���ͼ������ƥ���ʱ�䡣���ô��㷨���Ƶĵ�ͼ�ȽϾ�ȷ�����㷨�ܹ��ܺõؼ����ƶ�������SLAM���������ʱ�䣬�н�ǿ�������ԣ�ͬʱ�����������Ƶ��������ڵ��������һ���Ľ���Ͳο����塣 �ο����ף� [1] Wang W H, Chen W D, Xi Y G. Uncertain information based map building of mobile robots in absolutely unknown environment[J]. Robot, 2001, 23(6): 563-568. [2] Montemerlo M, Thrun S. Simultaneous localization and mapping with unknown data association using Fast SLAM[C]// Proceeding of the 2003 IEEE International Conference on Robotics and Automation. Taipei, China: IEEE Press, 2003: 1985-1991. [3] ����, ����, ����. ���ڼ����״���ƶ�������λ�˹��Ʒ�������[J]. ������, 2002, 24(2): 177-183. [4] Elfes A. Sonar-based real world mapping and navigation[J]. IEEE Journal of Robotics and Automation, 1987, 3(3): 249-265. [5] Elfes A. Occupancy grids: A probabilistic framework for robot perception and navigation[D]. Pittsburgh: Carnegie Mello University. Department of Electrical and Computer Engineering, 1989: 10-30. [6] Avots D, Lim E, Thibaux R, et al. A probabilistic technique for simultaneous localization and door state estimation with mobile robots in dynamic environments[C]//Proceeding of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems. Lausanne, Switzerland: IEEE Press, 2002: 521-526. [7] Aurenhammer F. Voronoi diagrams-a survey of a fundamental data structure[J]. ACM Computing Surveys, 1991, 23(3): 345-405. [8] Coeurjolly D, Zerarga L. Supercover model, digital straight line recognition and curve reconstruction on irregular isothetic grids[J]. Computers & Graphics, 2006, 30(1): 46-53. [9] Fabbri R, Da L, Costa F, et al. 2D Euclidean distance transform algorithms: A comparative survey[J]. ACM Computing Surveys, 2008, 40(1): 1-44. [10] Antoine Vacavant. Fast distance transformation on irregular two-dimensional grids[J]. Pattern Recognition, 2010, 43(10): 3348-3358. (�༭ �Կ�) �ո����ڣ�2011-04-15�������ڣ�2011-06-15 ������Ŀ�����������ߵ�ѧУ�˲�ǿ����ƻ�������Ŀ(PHR201106131) ͨ�����ߣ�����־(1963-)���У����������ˣ���ʿ�����ڣ������������ܿ��ƺͻ��������ܿ��Ƶ��о����绰��13693240372��E-mail��zqzbim@yahoo.com.cn![]() y˳��ɨ��
y˳��ɨ��![]()


YANG Ming, WANG Hong, ZHANG Bo. Overview of laser radar based pose estimation for mobile robots[J]. Robot, 2002, 24(2): 177-183.
ժҪ������ƶ�������ͬ���Զ�λ���ͼ����(SLAM)����������ڵ�ƥ��ķ�ʱ�䳤���⣬��һ�ֻ���Voronoiͼ������ڵ��㷨Ӧ�õ�SLAM�У����㷨����Voronoiͼԭ����դ���ͼ����2�κ���ɨ������õ�ͼ������դ�������ڵ㣬����˻����˽�ͼ��Ч�ʣ���������֤�˸÷����Ŀ����Ժ������ԡ�
