
DOI: 10.11817/j.issn.1672-7207.2019.06.011
�ն������������ҹ⻬�仯�Ĵֲڽ��淨�����ԽӴ�ģ��
Ф�᷼1��������2�������2
(1. �����Ƽ���ѧ ��е����ѧԺ��������100083��
2. �����Ƽ���ѧ �������Լ���Эͬ�������ģ�������100083)
ժ Ҫ��
�ڵͽ���Բ���߷��̵��巨�����ԽӴ��ն�ģ�͡���һ�����ڴֲڱ�����ò��Greenwood-Williamsonͳ��ģ�ͺ���߶ȷֲ������ܶȺ������Ƶ������ֲڽ���Ӵ��նȺͽӴ��غɱ���ʽ�������ֲڽ���Ӵ����ܸն�ģ�ͣ�����ģ�ͼ�������ʵ�����������жԱȷ������о������������ģ�Ϳ��Ǵֲڽ���ĵ��Ա��Ρ������Ա��κ���ȫ���Ա��νӴ�״̬����ͬʱ���㲻ͬ�Ӵ�״̬֮����ĽӴ��նȡ��Ӵ��غɺͽӴ�����������������ҹ⻬�仯���������˷�������ģ�ʹ��ڵĽӴ��նȷ��������ǵ�����ȱ�㣻���Ľ����Ĵֲڽ���Ӵ��ն�ģ����Ч��
�ؼ��ʣ�
�ֲڽ������Ӵ��ն��������Ա�����ͳ��ѧģ����
��ͼ����ţ�TH11 ���ױ�־�룺A ���±�ţ�1672-7207(2019)06-1343-08
An elastoplastic contact model for rough surface contact with continuous, monotonous and smooth stiffness
XIAO Huifang1, SUN Yunyun2, XU Jinwu2
(1. School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China;
2. Collaborative Innovation Center of Steel Technology,University of Science and Technology Beijing, Beijing 100083, China)
Abstract: A new elastoplastic contact stiffness model based on the low order elliptic curve was proposed for single asperity contact. The Greenwood-Williamson model was used for surface topography description and the whole contact stiffness for the rough surface was further derived based on the height distribution density function for asperities, and the whole contact stiffness model was established for the rough interface contact. The model predictions were compared with the experimental results. The results show that the proposed model can be used to describe the different contact status of elastic, elstoplastic and fully plastic contact and make the contact parameters of stiffness, force and area all continuous, monotonous and smooth between different contact status, which overcomes the shortcomings of non-continuous and non-monotonous in previous models, the proposed model has validity.
Key words: rough surface; contact stiffness; elastoplastic deformation; statistical model
�ֲڽӴ�����㷺�����ڻ�е�ṹ������豸�У�������ֵ��ֳ����Ͻ��桢��еĹ�����-�������桢������˨���ӽ��桢�����г��ij���-����γɵ��ֹ�����[1-4]���ֲڽ���Ӵ��ն��ǻ�е�ṹ����նȵ���Ҫ��ɲ��֣�Ҳ������������������Ҫ�IJ���֮һ����仯ֱ��Ӱ������Լ���еװ��ϵͳ�ľ�̬���ԺͶ���ѧ���ԣ������Ӵ�ѹ���ֲ�������Ӧ���ԡ�ĥ�������Լ������ȶ��Ե�[5-7]����ˣ��ֲڽ��淨��Ӵ��նȵ�ȷ����Ի�е�ṹ��ϵͳ�����ܷ�����Ԥ��������Ҫ�����۳߶��£��ֲڱ�����Կ����Ǿ���һ�����ʰ뾶�ĵ����尴�ղ�ͬ�ķֲ������γɵ����塣�����ⲿ�غ����ӣ���ı�������������ı���״̬�������Ա��Ρ������Ա��κ���ȫ���Ա��Ρ����У����Ա��νεĽӴ�����ͨ������Hertizan�Ӵ�ģ�ͱ���[8]����ȫ���Ա��νεĽӴ�����ͨ����������Ӳ��ģ�ͱ���[9]���������м�������ĵ����Ա��ννӴ�ģ�ͣ���Ҫ��֤��ĽӴ�״̬�����������Ӵ�ѹ�����Ӵ��غɺͽӴ��նȵȣ��ӵ��Խε����������ҹ⻬���ɵ���ȫ���ԽΡ�Ϊ�����㲻ͬ�Ӵ�״̬֮�䵥���������ҹ⻬���������о���Ա����˲�ͬ�ĵ�����ģ������������ķ���Ӵ����ԡ�ZHAO��[10]����CHANG��[11]�ĵ�-����ģ�ͣ����ò�ֵ���������˵����Ա���״̬��ʵ�ʽӴ������ƽ���Ӵ�ѹ���뷨��ӽ���֮��Ĺ�ϵ�������һ�ֲִڽ���ĵ����ԽӴ�ģ��(ZMCģ��)�����ǣ�ƽ���Ӵ�ѹ���ͽӴ��غɵı仯���ٽ�㴦���⻬�����½Ӵ��ն����ٽ�㴦���������Ҹնȱ仯���ǵ����ġ��������[12]��һ����ZMCģ�ͽ��иĽ��������������庯����ֵ�ķ����������һ�����ٽ�����������Ժ⻬��Ҫ��ķ���Ӵ�ģ��(MZMCģ��)����Ȼ�Ӵ��ն��淨��������ı仯��ϵ�������ģ����Dz��⻬�ͷǵ�����BRAKE[13]����Hermit����ʽ��ֵ�ķ����������һ�����㲻ͬ�Ӵ�״̬֮��⻬���������ɵĴֲڱ��浯���ԽӴ�ģ�͡����ǣ�����Hermit����ʽ�Ľ״νϸߣ���ֵ��õĵ����Խ�ƽ���Ӵ�ѹ���뷨�������֮��Ĺ�ϵ���߳�����ʹ�ýӴ�ѹ���ͽӴ��նȵı仯���̲��ǵ������쳬��[14]���һ�����õͽ���Բ���߲�ֵ���н�����ģ�ķ����������˴ֲڽ��浯���ԽνӴ�ģ�ͣ���ģ���ܹ�������ĽӴ�ѹ���ͽӴ�����淨��ӽ��������������⻬�ı仯���̣����ǣ�����ķ���Ӵ��ն���Ȼ���зǵ�����ȱ�㡣������������ԽӴ�ģ�͵IJ��㣬�����������һ���µĴֲڽ��淨��Ӵ�������ģ�ͣ���ģ���ܹ�������ĽӴ�״̬�����������Ӵ��غɡ��Ӵ�����ͽӴ��նȣ��ڲ�ͬ�Ӵ�״̬֮���������⻬�ҵ����仯���ڴ˻����ϣ����ڴֲڽ�����߶ȷֲ������ܶȺ������Ƶ���������ֲڽ���ķ���Ӵ��նȱ���ʽ��
1 ������Ӵ��ն�ģ��
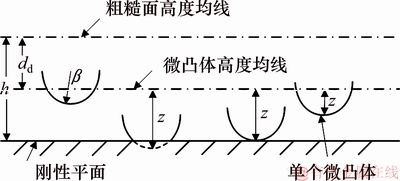
�����������ƽ��ĽӴ�ʾ��ͼ��ͼ1��ʾ������ֲ������״Ϊ�����Ҹ��ֲ�������ʰ뾶��Ϊ�£�������ĸ߶�z����Ϊ�嶥������߶Ⱦ���ľ��롣�������ֲ������֮��ľ���Ϊdd��dd=1.15��s[15]����sΪ�ֲ���߶ȷֲ��ı�ƫ�
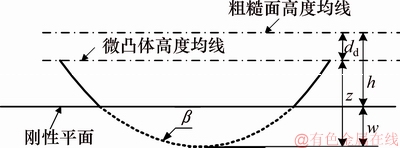
ͼ1 �����������ƽ��Ӵ�ʾ��ͼ
Fig. 1 Geometry of single asperity contact
1.1 ���ԽӴ�(w��w1)
����Hertzian���ԽӴ����ۣ��䵯�ԽӴ������Ա�ʾΪ[8]
 (1)
(1)
ʽ�У�EΪ�Ӵ�����ĵ�Ч����ģ����wΪ���Ա����������Ա�ʾΪ
 (2)
(2)
�Ӵ���� ���Ա�ʾΪ
���Ա�ʾΪ
 (3)
(3)
ƽ���Ӵ�ѹ�� ���Ա�ʾΪ
���Ա�ʾΪ
 (4)
(4)
������ķ���Ӵ��ն� ���Ա�ʾΪ
���Ա�ʾΪ
 (5)
(5)
��ʽ(5)��֪�����Ա��νΣ�������ķ���Ӵ��ն���������ʷ����Ա仯��ϵ����ӵ��Ա��ι��ɵ������Ա��ε��ٽ������w1[16]Ϊ
 (6)
(6)
ʽ�У�HΪ����Ӳ�ȣ�KΪӲ��ϵ��������ϵIJ��ɱ���أ�K=0.454+0.41v��
1.2 ��ȫ���ԽӴ�(w��w2)
����ķ��������w��w2ʱ���巢����ȫ���Ա��Σ����ٽ������w2[17]Ϊ
 (7)
(7)
��ʱ�������ƽ���Ӵ�ѹ��ppΪ���ϵ�Ӳ��H����
 (8)
(8)
�Ӵ���� Ϊ
Ϊ
 (9)
(9)
����ĽӴ��� ���Ա�ʾΪ
���Ա�ʾΪ
 (10)
(10)
��ķ���Ӵ��ն�kp���Ա�ʾΪ
 (11)
(11)
��ʽ(11)��֪����ȫ���Ա��νΣ�������ķ���Ӵ��ն�Ϊ��������������ء�
1.3 �����ԽӴ�(w1��w��w2)
����ı�����w1��w��w2ʱ�����洦�ڵ����Ա��νΡ������������������ӵ��Ա��ι��ɵ������Ա��Σ�ֱ����ȫ���Ա��νε��������̣��Ӵ�״̬����Ӧ�������������⻬�ҵ�����������Ϊ�����㲻ͬ�Ӵ�״̬֮�䵥���������ҹ⻬���������о���Ա����˲�ͬ�ĵ�����ģ�ͣ��Ա�������ķ���Ӵ����ԡ�
1.3.1 ZMCģ��
����ZMC�����ԽӴ�ģ�ͣ������Ա��νε�ƽ���Ӵ�ѹ�� Ϊ[10]
Ϊ[10]
 (12)
(12)
�Ӵ���� Ϊ[10]
Ϊ[10]
 (13)
(13)
����ʽ(12)��ʽ(13)���Ӵ��غ� ���Ա�ʾΪ
���Ա�ʾΪ

 (14)
(14)
������ķ���Ӵ��ն� ���Ա�ʾΪ
���Ա�ʾΪ
 (15)
(15)
1.3.2 �Ľ���ZMCģ��(MZMCģ��)
�ڸĽ���ZMCģ���У������Ա��νε�ƽ���Ӵ�ѹ�� Ϊ[12]
Ϊ[12]
 (16)
(16)
����
�Ӵ���� Ϊ[12]
Ϊ[12]
 (17)
(17)
����ʽ(16)��ʽ(17)���Ӵ��غ� ���Ա�ʾΪ
���Ա�ʾΪ

 (18)
(18)
������ķ���Ӵ��ն� ���Ա�ʾΪ
���Ա�ʾΪ

 (19)
(19)
1.3.3 Brakeģ��
����Brakeģ�ͣ������Ա��νε�ƽ���Ӵ�ѹ��Ϊ[13]
 (20)
(20)
����

�Ӵ����Ϊ[13]
 (21)
(21)
��Ӵ��ն����Ա�ʾΪ


 (22)
(22)
1.3.4 Xuģ��
����Xuģ�ͣ������Ա��ν�ƽ���Ӵ�ѹ��[14]Ϊ
 (23)
(23)
����
�Ӵ����[14]Ϊ
(24)
��Ӵ��ն����Ա�ʾΪ


 (25)
(25)
1.3.5 ����ģ��
Ϊ�����㵥����Ӵ��ն��ڵ��ԡ������Ժ���ȫ���ԵIJ�ͬ�Ӵ�֮��仯���������⻬�͵�����Ҫ����������õͽ���Բ�����������嵯���ԽνӴ��նȣ���ͨ���Ընȱ���ʽ���֣�����嵯���Խ��غɹ�ϵʽ�ĵ����ԽӴ�ģ�͡�
������Ӵ��նȵı���ʽΪ
 (26)
(26)
���У�C0��(kp-C1)�ֱ�Ϊ��Բ�����ij�����Ͷ̰��ᣬkp=2�Ц�H��C0��C1Ϊ����ϵ�����ɵ��Ա��ε������Ա����ٽ������w1���նȵ������Ժ⻬������ȷ����

 (27)
(27)
��ʽ(26)���ɵ�
 (28)
(28)
�������Ժ⻬�Ա߽�����ʽ(27)����ʽ(26)��(28)������
 ��
��
 (29)
(29)
������ĽӴ��նȿ��Ա�ʾΪ
 (30)
(30)
��ˣ������Ա��νε��غɺ���Ϊ

 (31)
(31)
���У�C2Ϊ����ϵ�����ɵ��Ա��ε������Ա����ٽ������w1���غɵ�����������ȷ������
 (32)
(32)
��ʽ(32)����ʽ(31)����
 (33)
(33)
������ĽӴ��������ʽ�����������庯������������ʽΪ
 (34)
(34)
���У�C3��C4Ϊ����ϵ�������ٽ������w1��w2�����������������ȷ����
 ��
��
 (35)
(35)
��ʽ(35)����ʽ(34)����
 (36)
(36)
1.4 ��ͬģ�ͼ���������
���ò�ͬ������ģ�ͼ����õĵ�����ĽӴ�������Ӵ��غɺͽӴ��ն��淨��������ı仯��ϵ���ߣ��ֱ���ͼ2��4��ʾ���������ΪE=52 GPa��v=0.25��H=6.2 GPa����=0.182 mm����ͼ2��֪����5�ֲ�ͬ�ĵ����ԽӴ�ģ�ͣ����������ԡ������Ժ���ȫ���Ա���״̬���Ӵ�����淨��������ı仯��ϵ���߾�Ϊ�����������ҹ⻬�ġ�
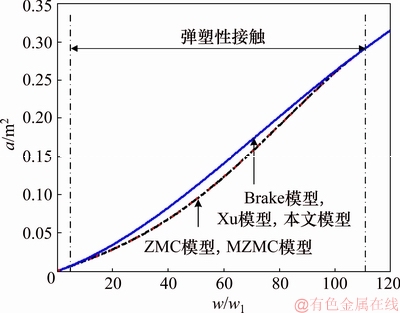
ͼ2 ��ͬģ�ͼ����õĵ�����Ӵ����
Fig. 2 Contact area of single asperity contact for different models
�Ӵ��غɵı仯��ϵ����ȴ���Ǿ�Ϊ�����������ҹ⻬����ͼ3��ʾ����ZMCģ�ͣ��Ӵ��غ��淨��������ı仯���ߵ������������������ٽ������w2�����⻬���ɴ˵��½Ӵ��ն����ٽ������w2������������ͼ4��ʾ����MZMCģ�ͺ�Brakeģ�ͣ����ڽӴ��غɱ���ʽ����ʽ�Ľ״νϸߣ�ʹ�ýӴ��غ��淨��������ı仯���߷ǵ��������½Ӵ��ն��淨��������ı仯�������������ָ��նȡ���Xuģ�ͣ��Ӵ��غ��淨��������ı仯���ߵ����������ҹ⻬��������Ӵ��ն��淨��������ı仯����ȴ�ǵ������Ա��������ģ�ͣ��Ӵ��غɺͽӴ��ն��淨��������ı仯���߾�Ϊ�����������ҹ⻬�仯��

ͼ3 ��ͬģ�ͼ����õĵ�����Ӵ��غɶԱ�
Fig. 3 Contact force of single asperity contact for different models
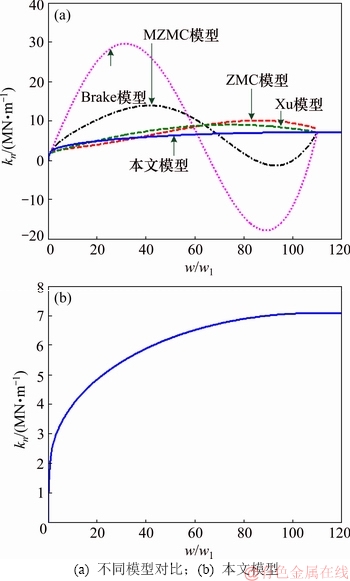
ͼ4 ��ͬģ�ͼ����õĵ�����Ӵ��ն�
Fig. 4 Contact stiffness of single asperity contact
2 �ֲڽ���Ӵ��ն�ģ��
����GWͳ��ѧģ�ͼ���ֲڽ����ϽӴ�����[18]������������Ӵ��նȺ��غɶ��������л��֣���ôֲڽ���Ӵ����ܸնȺ����غɡ��ֲڽ���Ӵ�ģ��ʾ��ͼ��ͼ5��ʾ��
ͼ5 �ֲڱ��������ƽ���ͳ�ƽӴ�ģ��
Fig. 5 Statistical micro-contact model of rough surface
������������һ������


����߶�zn���ڴֲ�����������ƽ��֮��ľ���hn-dnʱ���������ƽ��Ӵ�����Ӵ�����Ϊ[18]
 (37)
(37)
���У� ���Ǹ߶�Ϊ����˹�ֲ��ĸ����ܶȺ������������ֲڽ���ĽӴ��նȺ����غɿ��Էֱ��ʾΪ
���Ǹ߶�Ϊ����˹�ֲ��ĸ����ܶȺ������������ֲڽ���ĽӴ��նȺ����غɿ��Էֱ��ʾΪ

 (38)
(38)

 (39)
(39)
ʽ�У�NΪ�ֲڱ�����������N=nAn��nΪ��ֲ��ܶȣ�AnΪ����Ӵ������
����ͬ���νε�����ĸնȱ���ʽ���غɱ���ʽ�ֱ����ʽ(38)��(39)����ֲڽ���ĽӴ��նȺ��غɿ��Էֱ��ʾΪ

 (40)
(40)



 (41)
(41)
���� ��
��
3 �ֲڽ���Ӵ��ն�ģ����֤��������
3.1 ģ����֤
����[19]���ó�������ϵ���������˲�ͬ�Ӵ�����ѺϽ�Ti-6Al-4V�ֲڽ���ĽӴ��նȣ��ѺϽ�IJ��ϲ���ΪE=115 GPa, v=0.31���������߶ȱ�ƫ���s=2.3 ��m�����ñ��ĽӴ��ն�ģ��ʽ(40)��ʽ(41)�����õķ������Ӵ��ն�-�غɱ仯��ϵ����������[19]ʵ�������õĽ���Ա�ͼ����ͼ6��ʾ����ͼ6��֪��ģ�͵ļ�������ʵ����Խ������һ�£�˵�����ĵĽ������Ӵ��նȵ�ģ������Ч�ġ��ɿ��ġ�
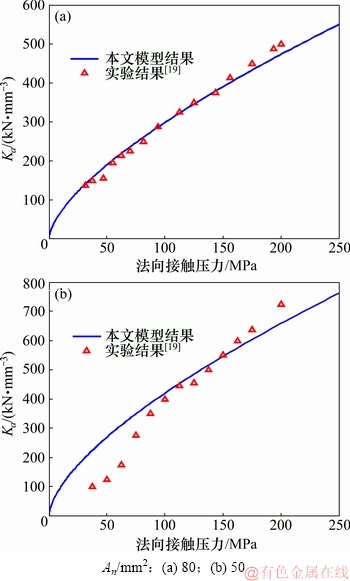
ͼ6 �ֲڽ������Ӵ��նȵ�ģ�ͼ�������ʵ����[19]�Ա�
Fig. 6 Comparison of solid contact stiffness versus pressure between model results and experimental results[19] for different nominal area
3.2 ��ͬ�ֲڶȽ���ն�
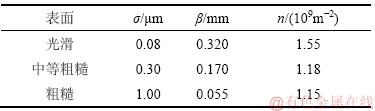
�⻬���桢�еȴֲڽ���ʹֲڽ���ı�����ò����[20]���1��ʾ���Բ�ͬ�ֲڶȽ��棬���ñ�������ĵ���-������-��ȫ���Ըն�ģ��ʽ(40)��ʽ(41)�����õĽ���Ӵ��ܸն���Ӵ��غɵı仯��ϵ������ͼ7��ʾ�����봿���ԽӴ�GWģ�ͼ����õĸն�-�غɹ�ϵ���߽��жԱȡ�
��1 ��ͬ�ֲڶȱ�����ò����
Table 1 Parameters of surfaces with different roughness
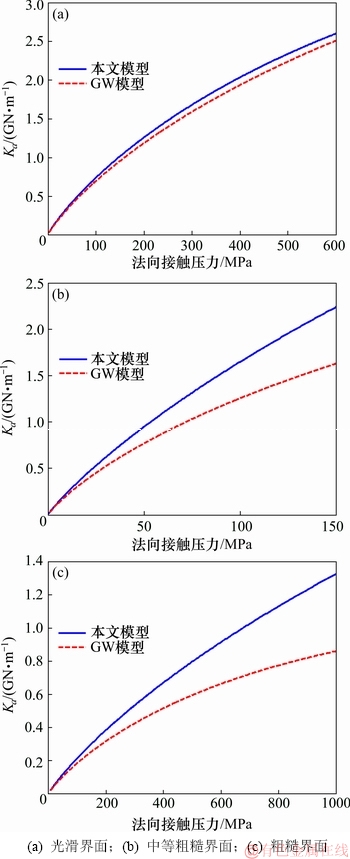
ͼ7 ��ͬ�ֲڶȽ���ķ���Ӵ��ն����غɵı仯��ϵ����
Fig. 7 Variation of normal contact stiffness with normal load for different roughness
��ͼ7��֪�����ǵ���-������-��ȫ���Բ�ͬ�Ӵ�״̬�ն�ģ�ͼ����õĸնȴ��ڴ�����GW�Ӵ�ģ�͵ĸնȼ���ֵ�������ű���ֲڶ�����2�ֲ�ͬģ�ͻ�õĸնȲ�ֵ�����������������ű���ֲڶ�������ӵ��Ա��ι��ɵ������Ա��ε��ٽ������w1��С�������Ա��νζԽ���Ӵ�״̬��Ӱ����������2��ģ�ͻ�õĸնȲ�ֵ������
��ͼ7����֪���ֲڽ���Ӵ��ն��淨���غɳʷ����Ե�����������ķ������غɵ�������С(���ߵ�б����С)�����ű���ֲڶ�������Ӵ��ն���С��
4 ����
1) ���һ���µĻ��ڵͽ���Բ���ߵ��巨�����ԽӴ��ն�ģ�ͣ���ģ�Ϳ��Ǵֲڽ���ĵ��Ա��Ρ������Ա��κ���ȫ���Ա��νӴ�״̬���ұ�֤��ͬ�Ӵ�״̬֮����ĽӴ��նȡ��Ӵ��غɺͽӴ�����������������ҹ⻬�仯���˷�������ģ�͵ĽӴ��նȷ��������ǵ�����ȱ�㡣
2) ������߶ȷֲ������ܶȺ������Ƶ�����������ֲڽ���Ӵ��նȺͽӴ��غɱ���ʽ�������������ֲڽ���Ӵ��ն�ģ�͡�
3) ģ�ͼ�������ʵ������������һ�£���֤�˱��Ľ����Ĵֲڽ���Ӵ��ն�ģ�͵���Ч�ԡ�
4) ���ǵ���-������-��ȫ���Բ�ͬ�Ӵ�״̬�ն�ģ�ͼ����õĸնȴ��ڴ����ԽӴ�GWģ�նȼ���ֵ�������ű���ֲڶ�����2��ģ�ͻ�õĸնȲ�ֵ������
5) �ֲڽ���Ӵ��ն��淨���غɳʷ����Ե��������ű���ֲڶȵ��������С��
�ο����ף�
[1] SAXENA A, PAREY A, CHOUKSEY M. Time varying mesh stiffness calculation of spur gear pair considering sliding friction and spalling defects[J]. Engineering Failure Analysis, 2016, 70: 200-211.
[2] LIU Jing, SHAO Yimin. Dynamic modeling for rigid rotor bearing systems with a localized defect considering additional deformations at the sharp edges[J]. Journal of Sound and Vibration, 2017, 398: 84-102.
[3] XIAO Huifang, SHAO Yimin, XU Jinwu. Investigation into the energy dissipation of a lap joint using the one-dimensional microslip friction model[J]. European Journal of Mechanics A: Solids, 2014, 43: 1-8.
[4] LUNDBERG O E, NORDBORG A, LOPEI ARTEAGA I. The influence of surface roughness on the contact stiffness and the contact filter effect in nonlinear wheel-track interaction[J]. Journal of Sound and Vibration, 2016, 366: 429-446.
[5] CARRELLA A, BRENNAN M J, WATERS T P, et al. Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness[J].International Journal of Mechanical Sciences, 2012, 55(1): 22-29.
[6] ZOU H T, WANG B L. Investigation of the contact stiffness variation of linear rolling guides due to the effects of friction and wear during operation[J]. Tribology International, 2015, 92: 472-484.
[7] ��С��, �����, �߽�, ��. �������ò���Զ�ģ̬��ϲ��ȶ�ϵͳ��Ӱ��[J]. ��е����ѧ��, 2017, 53 (5): 116-127.
LI Xiaopeng, PAN Wujiu, GAO Jianzhuo, et al. Influence of surface topography characteristics on mode coupling instability system[J]. Journal of Mechanical Engineering, 2017, 53(5): 116-127.
[8] JOHNSON K L. Contact mechanics[M]. Cambridge: Cambridge University Press, 1985.
[9] LIU Peng, ZHAO Han, HUANG Kang, et al. Research on normal contact stiffness of rough surface considering friction based on fractal theory[J]. Applied Surface Science, 2015, 349: 43-48.
[10] ZHAO Y W, MAIETTA D M, CHANG L. An asperity microcontact model incorporating the transition from elastic deformation to fully plastic flow[J]. Journal of Tribology, 2000, 122(1): 86-93.
[11] CHANG W R, ETSION I, BOGY D B. An elastic-plastic model for the contact of rough surfaces[J]. ASME Journal of Tribology, 1987, 109(2): 257-263.
[12] ������, ������, ������. �µĴֲڱ��浯���ԽӴ�ģ��[J]. ��е����ѧ��, 2007,43(3): 95-101.
ZHAO Yongwu, LU Yanming, JIANG Jianzhong. New elastic-plastic model for the contact of rough surfaces[J]. Journal of Mechanical Engineering, 2007, 43(3): 95-101.
[13] BRAKE M R. An analytical elastic-perfectly plastic contact model[J]. International Journal of Solids and Structures, 2012, 49(22): 3129-3141.
[14] �쳬, ����. һ�ָĽ��Ĵֲڱ��淨�����ԽӴ�����ģ��[J]. ������ͨ��ѧѧ��, 2014, 48(11): 115-121.
XU Chao, WANG Dong. An improved analytical model for normal elastic-plastic contact of rough surfaces[J]. Journal of Xi��an JiaoTong University, 2014, 48(11): 115-121.
[15] SOJOUDI H, KHONSARI M M. On the modeling of quasi-steady and unsteady dynamic friction in sliding lubricated line contact[J]. Journal of Tribology, 2010, 132(1): 012101.
[16] LIOU J L, LIN J F. A modified fractal microcontact model developed for asperity heights with variable morphology parameters [J]. Wear, 2010, 268(1/2): 133-144.
[17] KOGUT L, ETSION I. Elastic-plastic contact analysis of a sphere and a rigid flat[J]. ASME Journal of Applied Mechanics, 2002, 69(5): 657-662.
[18] GREENWOOD J A, WILLIAMSON J B P. Contact of nominally flat surfaces[J]. Proceedings of the Royal Society of London, Series A, 1966, 295: 300-319.
[19] MULVIHILL D M, BRUNSKILL H, KARTAL M E, et al. A comparison of contact stiffness measurements obtained by the digital image correlation and ultrasound techniques[J]. Experimental Mechanics, 2013, 53(7): 1245-1263.
[20] BEHESHTI A, KHONSARI M M. Asperity micro-contact models as applied to the deformation of rough line contact[J]. Tribology International, 2012, 52: 61-74.
(�༭ �Կ�)
�ո����ڣ�2018-06-07�������ڣ�2018-08-07
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51775037)(Project(51775037) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�Ф�᷼����ʿ�������ڣ����»�е�ṹ���涯��ѧ�о���E-mail��huifangxiao@ustb.edu.cn
ժҪ�����һ���µĻ��ڵͽ���Բ���߷��̵��巨�����ԽӴ��ն�ģ�͡���һ�����ڴֲڱ�����ò��Greenwood-Williamsonͳ��ģ�ͺ���߶ȷֲ������ܶȺ������Ƶ������ֲڽ���Ӵ��նȺͽӴ��غɱ���ʽ�������ֲڽ���Ӵ����ܸն�ģ�ͣ�����ģ�ͼ�������ʵ�����������жԱȷ������о������������ģ�Ϳ��Ǵֲڽ���ĵ��Ա��Ρ������Ա��κ���ȫ���Ա��νӴ�״̬����ͬʱ���㲻ͬ�Ӵ�״̬֮����ĽӴ��նȡ��Ӵ��غɺͽӴ�����������������ҹ⻬�仯���������˷�������ģ�ʹ��ڵĽӴ��նȷ��������ǵ�����ȱ�㣻���Ľ����Ĵֲڽ���Ӵ��ն�ģ����Ч��
[7] ��С��, �����, �߽�, ��. �������ò���Զ�ģ̬��ϲ��ȶ�ϵͳ��Ӱ��[J]. ��е����ѧ��, 2017, 53 (5): 116-127.
[8] JOHNSON K L. Contact mechanics[M]. Cambridge: Cambridge University Press, 1985.
[12] ������, ������, ������. �µĴֲڱ��浯���ԽӴ�ģ��[J]. ��е����ѧ��, 2007,43(3): 95-101.
[14] �쳬, ����. һ�ָĽ��Ĵֲڱ��淨�����ԽӴ�����ģ��[J]. ������ͨ��ѧѧ��, 2014, 48(11): 115-121.
