
DOI: 10.11817/j.issn.1672-7207.2015.02.016
���µ��Կ�������ۼܱ�λ�˹���Ƶ���㷨
����1, 2��������1, 2��������1, 2��������1, 2
(1. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
2. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
����ҵ��Ƶ��λ�˱任����Ƶ�ʲ����������⣬���ö��崫�ݾ������Ľڱۼܶ���ѧģ�ͣ�ģ�ͷ�ΪA��B 2����ϵͳ����ϵͳAΪ��1�ڱۡ�֧�������ӣ���ϵͳBΪ��3�ڱۡ������ӡ�����Һѹ���������˽µ��Ե�Ӱ�죬��������ģ�ͷ�װ����4�ֳ���λ�˵Ĺ���Ƶ�ʣ��������бۼ�ʵ��̨�Ͻ���ʵ����֤���о�������������ö��崫�ݾ�������λ�˶���ϵͳ�ۼܹ���Ƶ�ʱ����˴�ͳ�����������趨����IJ��裬4��λ�˼���µ��ԵĹ���Ƶ�ʾ�������½����Ҹ��ӽ�ʵ��ֵ��Ϊ�����е�ı�λ��Ƶ�ʼ��������ʵʱ�����ṩ�ο���
�ؼ��ʣ�
�������ۼ����µ��������ݾ�������������Ƶ����
��ͼ����ţ�TU646 ���ױ�־�룺A ���±�ţ�1672-7207(2015)02-0485-06
Multibody open-loop mobile concrete pump boom with joint elasticity multi posture natural frequency algorithm
REN Wu1, 2, WU Yunxin1, 2, ZHANG Zhaowei1, 2, ZENG Yihui1, 2
(1. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China;
2. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: In order to calculate the different postures natural frequencies of multibody mobile concrete pump truck boom, the transfer matrix method was adopted. Then a four-boom equivalent mechanical model was established. The model was divided into sub-system A and B. The sub-system A was linked to the first boom, standoffs and its hydraulic cylinder. The sub-system B was linked to the other three booms and cylinders. The revolute joint elasticity of the boom cylinder connection was also considered. After packaging the two sub-systems, the frequencies of four common postures were solved, and an experiment was carried out on a test rig. The results show that it is not necessary to reset the parameters and resolve in different posture frequency calculations by transfer matrix method. At the same time, the frequencies considering joints elasticity are smaller than those of ideal joints and are closer to the test ones. All of these provide reference for natural frequency calculation and real-time monitoring for mobile truck booms.
Key words: multibody; boom; joint elasticity; transfer matrix method; vibration; natural frequency
�ó��ۼ��ǵ��͵Ķ��忪����е�ۣ�Ŀǰ��ıۼ��Ѿ�����101 m����Χ�˶����������ʹ���ڵ�Ƶ����ʱ�ܵ��ϴ����ͬʱ���ۼ�λ�˵�Ƶ���任���¹���Ƶ�ʲ��ϱ仯������Ʒ����������㡣�����о��У�Cazzulani��[1]�о��˱ó��ۼܼ�ĩ��������ıۼ�����Ƶ�ʱ仯��Liu��[2]�����˴�Χ�˶�����˫������·������˶����̣������˱۵������ԡ����ܵ�[3]������ij�ó��ۼܶ����ģ�Ͳ��Զ�����ۼ�ĩ��λ�ƽ�����̽�֡�����[4]�о��������ͳ������������Աۼ���Ƶ�ʵ�Ӱ�졣���к��[5-7]���������ڻ���Һ���ϵͳƵ���ͨ�ô��ݾ����ṩһ�ָ�����ķ��淽����Li��[8-9]������Һѹ���������Ա۶���ѧģ�Ͳ�����ĩ��λ�ƿ��Ʒ��档����ͤ��[10]�����ɢ���ݾ���Ӧ�������л��ڵȶ�������ϵͳ����ѧ����ʵ��������Ƶ����⡣Flores[11]��������ת����ײĦ��ԭ�������������������˶�����ģ�͡��������[12-14]�о������˻����˶�����ײ����ѧ���ԣ���������ʵ���о���Dupac��[15]������ƽ���������˻����ĵ���Ӱ�죬ָ������Ӱ���ڴ����������ѧ�о��в�Ӧ���ӡ���Χ����̬��е����������ó��ۼܵ��о���ͨ�����µ���������������������˽µ�����ײ��Ӱ�졣���������Զ��忪���ۼ�Ϊ�о��������ô��ݾ����������ģ�ͺͽµ���ģ�ͣ����ټ������λ�˱任ʱ�Ĺ���Ƶ�ʣ���ͨ���ۼ�ʵ��̨��֤ģ�͵���ȷ�Ժͼ��㷽���ĺ����ԡ�
1 �µ�����ײ���ۺͲ���ѡȡ
Lankarani-Nikraveshģ���ǸĽ���Hertz�Ӵ�ģ��[11]����ʽ(1)��ʾ��
 (1)
(1)
����
 (2)
(2)
 (3)
(3)
 (4)
(4)
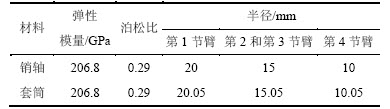
FnΪ�Ӵ���ײ����KΪ�Ӵ�����ĸն�ϵ�����ɸ���Goldsmith��ײʵ��ó�����Ϊ����ȣ�CΪ�Ӵ���ײ����ϵ���� Ϊ�Ӵ���ײ����ٶȣ���nΪ����½�ϵ�����Ժ�E�ֱ�Ϊ���ϲ��ɱȺ͵���ģ������������[13]��nȡ1.5��RiΪ����뾶��Rj(j=1��2��3��4)�ֱ�Ϊ�Ľڱ����İ뾶��ceΪ�ָ�ϵ����ȡ0.9��
Ϊ�Ӵ���ײ����ٶȣ���nΪ����½�ϵ�����Ժ�E�ֱ�Ϊ���ϲ��ɱȺ͵���ģ������������[13]��nȡ1.5��RiΪ����뾶��Rj(j=1��2��3��4)�ֱ�Ϊ�Ľڱ����İ뾶��ceΪ�ָ�ϵ����ȡ0.9�� Ϊײ����ij�ʼ����ٶȡ��ԣ�E��Ri��Rjȡֵ����1��
Ϊײ����ij�ʼ����ٶȡ��ԣ�E��Ri��Rjȡֵ����1��
��1 ������Ͳ������ṹ����
Table 1 Pin and bushing material structure property
2 ���µ��Աۼܶ���ѧģ��
2.1 ��ѧģ��
���忪���ۼܴӸ���������Ҫ�ɱۡ������Լ�Һѹ��������ɣ����ڱۼ��ɶ�������˴������ɣ������������ͽ��ۼ�ϵͳ���ֳ�2���ӽṹ����߽�ģЧ����ͼ1��ʾ��
�ۼܵ�2���ӽṹ�ֱ�����Ԫ���ͽ�Ԫ������ЩԪ�����ݾ����������ӹ�ϵ���г�����װ�õ������ӽṹ���ݷ��̺ʹ��ݾ���Ȼ��2���ӽṹ�ٷ�װ���ܴ��ݷ��̺��ܴ��ݾ���������ñ߽������õ���ϵͳ�Ķ���ѧ���ԡ�ģ���бۼܵ�ЧΪ������Ԫ�������ˡ��������˵�ЧΪ����Ԫ������ת�µ�ЧΪ��������ϵͳ����ն�ϵ����ʽ(2)���㣬Һѹ�͵�ЧΪһ���նȵĵ���Ԫ�������Աۼ�����Ťת��Ӱ�죬�Ľڱۼ�Ϊŷ��-��Ŭ�������ٶ��ۼܵ����˶��Ժ������ļ��ٶȺͿ��ϼ��ٶȵ�Ӱ�죬��������ӵ�״̬ʸ��Ϊ
 (5)
(5)
��ģ̬����ϵ�£�ʽ(5)��X, YΪ��λ�ƣ�QzΪ��λ�ƣ�MzΪ�����أ�Qx��QyΪ������
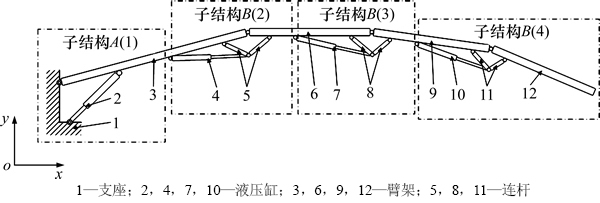
ͼ1 �ۼ�ϵͳ�ӽṹ����
Fig. 1 Sub-structure diagram of mobile concrete truck boom
2.2 �ӽṹ�Ĵ��ݾ���
�ۼܽṹ���ֳ��ӽṹA���ӽṹB�����нṹA������1�ڱۡ�֧�����������Լ�Һѹ������������ת�£��ṹB�ַ�Ϊ3���ǽṹ��������3�ڱ۽ṹ����ӦҺѹ��������ת�£���ͼ2��ͼ3��ʾ��
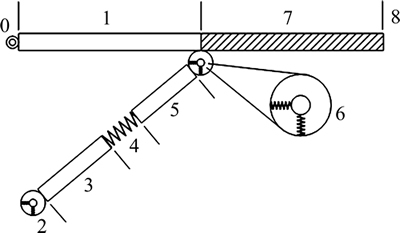
ͼ2 �ӽṹA����
Fig. 2 Connection of sub-structure A
�ӽṹA�ж���0Ϊ������ˣ�8Ϊ������ˣ�1��3��5Ϊ����Ԫ����2��4��6Ϊƽ�浯�����ӵ��Ե�Ԫ������6Ϊ���Խ£�7Ϊ�Ƚ���ŷ��-��Ŭ����Ԫ�������ݴ��ݾ��õ���Ԫ���Ĵ��ݾ���Ui, ��0~8Ԫ����Ͽɵõ��ӽṹA�Ĵ��ݷ��̣�
 (6)
(6)
1��7��6���Ӵ���λ�ƺ�������ϵ���£�
 (7)
(7)
��ʽ(6)��ʽ(7)�ɵã�
 (8)
(8)
ת������E1~E3�ֱ�Ϊ��


 (9)
(9)
�ӽṹA�Ĵ��ݷ������£�
 (10)
(10)
�ӽṹA�Ĵ��ݾ���UA�Լ�״̬ʸ��ZAΪ��
 (11)
(11)

ͼ3 �ӽṹB����
Fig. 3 Connection of sub-structure B
�ӽṹB��0Ϊ������ˣ�12Ϊ������ˣ�2��3��6��8��10��11Ϊ����Ԫ����5��7��9Ԫ��Ϊƽ�浯�ɽ�����Ԫ����1��4Ԫ��Ϊ�Ƚ���ŷ��-��Ŭ����Ԫ�����Ƶ���ʽ��ṹA�����ƣ����ݸ�Ԫ��֮������ӹ�ϵ�õ��ӽṹB�Ĵ��ݾ���UB����״̬ʸ��ZB���£�
 (12)
(12)
���У�OΪ����� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
��
 ��
�� (13)
(13)
2.3 �ܴ��ݾ���
�������ó��ۼ���װϵͳ���ӽṹA���ӽṹB��3�����ִ������ɣ������ӽṹA��Z7��8���ӽṹB��Z0��1�� Z0��5�γ����ӵ㣬�ӽṹBi��Z4��12���䴮�����ӽṹBi+1��Z0��1�� Z0��5�γ��µ����ӵ㣬�������ӵ��λ�ƺ�������ϵ���Եõ��ۼ��ܴ��ݷ��̣�
 (14)
(14)
 (15)
(15)
 ��
��
 ��
��
 ��
��
 (16)
(16)
���У�Uall�ۼ�ϵͳ�ܴ��ݾ���ZallΪ������ʸ����
�ɱ߽������ɵýṹA��B�߽�״̬ʸ���������ӽṹA�߽�״̬ʸ��Ϊ
 (17)
(17)
��ĩ���ӽṹB(��ż�Ϊi)״̬ʸ��Ϊ
 (18)
(18)
ĩ���ӽṹB(��ż�ΪN)״̬ʸ����ʽ(19)��ʾ���ɱ߽������ɽ�Zall�е���Ԫ��(����21��)ȥ��ʣ�µ�״̬ʸ����Ϊ ��ͬʱ��Uall��ȥ��Zall��Ԫ�ض�Ӧ���У���Ϊ
��ͬʱ��Uall��ȥ��Zall��Ԫ�ض�Ӧ���У���Ϊ ����N=4ʱ�����õ��к���105��δ֪Ԫ�أ�Ϊ105���õ�����������ʽ(20)��ʾ��
����N=4ʱ�����õ��к���105��δ֪Ԫ�أ�Ϊ105���õ�����������ʽ(20)��ʾ��
 (19)
(19)
 (20)
(20)
���ڱó��ۼ�ʵ������ҪƵ��λ�˱任��Ϊ������������̬�Ĺ���Ƶ�ʣ����������ܴ��ݾ���ģ���д��ݾ�������ӷ�ʽ���䣬��Ԫ���ĽǶȸı䡣��Ԫ���ı仯�Ƕ��ɱۼܵ�λ�˽�ͨ�����ν�����û���Ԥ�裬Ȼ����ʽ(21)�����ݾ������ת������任����������̬�µĴ��ݾ����Լ����ݷ��̣��Ӷ��õ��ۼ�������̬���������Ƶ��fk(��1����2����3����4) (k=1��2����)�����Ц�iΪ���ۼ����ˮƽ��ĽǶȡ�
 (21)
(21)
ʽ�У�H-f��HfΪ����ת������UiΪ��״̬Ԫ�����ݾ��� Ϊ������̬�µ�Ԫ�����ݾ���
Ϊ������̬�µ�Ԫ�����ݾ���
��Matlab�б�д��Ӧ�ij�����⣬�ó��ۼ�Ϊ�Ľڱۣ��ܳ�13 m���ṹ��������2��Ԥ���н������ö��ַ��ƽ���������ʽ(20), �ݲΧ(�ݲ�Ϊ-1��10-7~1��10-7)�Ħز���Newmark-�»��ַ��õ�������ʱ��28 s���ڴ�ʱ������ɴ�ˮƽ������¥�������ı任������0.03 s���õ��ۼܳ��ù����µĹ���Ƶ�ʡ�
3 �ۼܶ�λ�˹���Ƶ�ʷ��������ʵ��
3.1 λ��ѡȡ
���ݱۼܾ����õ���̬�������ʵ����ѡ����ͼ4��ʾ��4����̬���м��㡣
�����������о���������ת�µ���Ӱ��Ĺ���Ƶ�ʣ�Ȼ�����Һѹ�ͱ����ӵ���ת�µ���Ӱ�죬���ڱۼ�һ���ǵ�ƵӰ��ϴ���ˣ���Ҫ�����һ����Ƶ�ʵı仯���ֱ����2�ֲ�ͬģ����Ӧ��̬�ĵ�1����Ƶ�ʡ�
3.2 ʵ���о�
Ϊ����֤����ϵͳ���ݾ���ģ����ȷ�ԣ��������е��ܳ�13 m�Ľڱ۱ۼ�ʵ��̨��Dewesoft�źŲɼ��ǡ�������ٶȴ���������ʵ���о����ۼܲ���ΪQ345B����Ҫ�ṹ��������2��
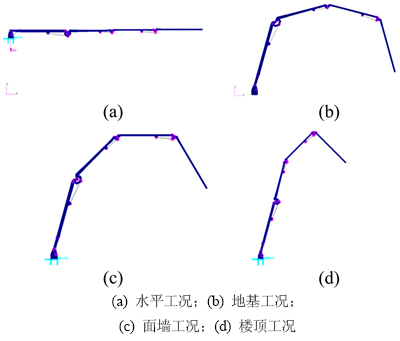
ͼ4 �ۼܳ���λ��
Fig. 4 Common postures of booms
��2 �ۼ�ģ����Ҫ����
Table 2 Main parameters of each boom

3.3 �����ʵ��������
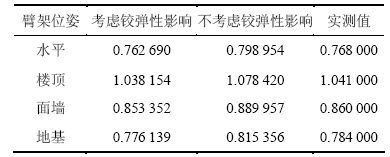
���ݷ��������ʵ���������2��ģ�ͼ�������λ�˵ĵ�1����Ƶ�ʼ���3��
�ɱ�3�ɼ���4��λ�˶Ա��п��ǽµ���Ӱ��Ͳ����ǽµ���Ӱ��ģ�͵�λ���ж���ˮƽ��̬����Ƶ����ͣ�˵��ˮƽ����������Ӱ�����Ĺ�����Ҳ�ǹ�������ӵĹ�����¥��������Ƶ����ߣ���ǽ�͵ػ�������������֮�䣻����λ���������ģ�͵Ĺ���Ƶ������ڼӽµ���Ӱ��ģ�͵Ĺ���Ƶ�ʶ�ƫ��˵���µ���Ӱ��ļ����С�˻����Ĺ���Ƶ�ʣ�ʹ�ñۼ����ֳ���������ԣ�ͬʱ�����ǽµ���Ӱ���ģ�͵�Ƶ�ʸ��ӽ���ʵ��ֵ��֤�������м���µ���Ӱ��ı�Ҫ�Ժ���ȷ�ԡ�
��3 ����Ƶ����ֵ��������ʵ��ֵ�Ա�
Table 3 Comparison between natural frequency numerical results and test values Hz
4 ����
1) ���ô��ݾ������ۼ�����ģ�����ϵͳ����Ƶ�ʣ�ʵ��������ºʹ��µ��ԵĶ��忪����λ�˱ۼ�����Ƶ�ʷ��棬����Ҫ���ϱ任λ�˵Ľṹ�dz����ã������˴�ͳ���������趨��������IJ��裬�ʺϹ���Ӧ�á�
2) ���µ���ģ�͵ķ���ֵ���ӽ�����ֵ���ر���ˮƽ�����������ֱۼܵ�����Ӱ�죬Ϊ�������Ƶ�ʼ����ṩ������
�ο����ף�
[1] Cazzulani G, Resta F, Ripamonti F. A Feedback and feedforward vibration control for a concrete placing boom[J]. Journal of Vibration and Acoustics, 2011, 133(5): 1002-1008.
[2] LIU Zhuyong, HONG Jiazhen, LIU Jinyang. Complete geometric nonlinear formulation for rigid-flexible coupling dynamics[J]. Journal of Central South University of Technology, 2009, 16(1): 119-124.
[3] ����, ����, ������, ��. �������ó��ۼ����Զ��嶯��ѧ��ģ�����[J]. ��е����ѧ��, 2007(11): 131-135.
LIU Jie, DAI Li, ZHAO Lijuan, et al. Modeling and simulation of flexible multi-body dynamics of concrete pump truck arm[J]. Chinese Journal of Mechanical Engineering, 2007, 43(11): 131-135.
[4] ����, ������. �������ó��ۼ�ϵͳ�������о�[J]. ������, 2011, 30(9): 259-263.
WANG Binhua, Lv Pengmin. Vibration mechanism of arm system of concrete pump truck[J]. Journal of Vibration and Shock, 2011, 30(9): 259-263.
[5] ���к�, �μ���. ������ϵŤ����ѧ��ģ���編[J]. �й���ɫ����ѧ��, 2002, 12(2): 388-392.
HE Shanghong, Duan Ji'an. Network method for dynamic modeling of complex shafting torsional vibration system[J]. The Chinese Journal of Nonferrous Metals, 2002, 12(2): 388-392.
[6] ���к�, �μ���, �Ӿ�. ����ϵͳͨ�ý�ģ����[J]. ���Ϲ�ҵ��ѧѧ��(��Ȼ��ѧ��), 2002, 33(5): 517-521.
HE Shanghong, Duan Ji'an, Zhong Jue. Universal matrix method for modeling electromechanical systems[J]. Journal of Central South University of Technology (Natural Science), 2002, 33(5): 517-521.
[7] ���к�, ������. ����������Ļ������ó��������������Խ�ģ�빤���Ż�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(4): 1398-1404.
HE Shanghong, YANG Yunzi, Modeling of universal characteristics and optimization of operating conditions of concrete pump truck based on neural network[J]. Journal of Central South University (Science and Technology), 2010, 41(4): 1398-1404.
[8] LI Guang, WU Min. Modeling and controlling of a flexible hydraulic manipulator[J]. Journal of Central South University of Technology, 2005, 12(5): 578-583.
[9] ZHANG Chunyi, BAI Guangchen. Extremum response surface method of reliability analysis on two-link flexible robot manipulator[J]. Journal of Central South University, 2012, 19(1): 101-107.
[10] ����ͤ, �ֱ�. ����ϵͳ���ݾ����о���չ[J]. ��ѧ��չ, 2012, 42(1): 4-17.
RUI Xiaoting, RONG Bao. Advances in transfer matrix method for multibody system dynamics[J]. Advances in Mechanics, 2012, 42(1): 4-17.
[11] Flores P. A parametric study on the dynamic response of planar multibody systems with multiple clearance joints[J]. Nonlinear Dynamics, 2010, 61(4): 633-653.
[12] ������, ����, ��־��. �����˶�����϶�Ļ�����̬�����о�[J]. ������, 2011(11): 17-20.
BAI Zhengfeng, ZHAO Yang, ZHAO Zhigang. Dynamics characteristics of mechanisms with joint clearance[J]. Journal of Vibration and Shock, 2011, 30(11): 17-20.
[13] Mukras S. Analysis and design of planar multibody systems with revolute joint wear[D]. Florida: University of Florida. Materials Science Engineering College, 2009: 55-62.
[14] BAI Zhengfeng, ZHAO Yang. Dynamic behaviour analysis of planar mechanical systems with clearance in revolute joints using a new hybrid contact force model[J]. International Journal of Mechanical Sciences, 2011, 54(1): 190-205.
[15] Dupac M, Beale D G. Dynamic analysis of a flexible linkage mechanism with cracks and clearance[J]. Mechanism and Machine Theory, 2010, 45(12): 1909-1923.
(�༭ �Կ�)
�ո����ڣ�2014-03-16�������ڣ�2014-07-10
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2008AA042802)������ʡ�ߵ�ѧУʡ����Ȼ��ѧ�о��ص���Ŀ(KJ2013A141)������ʡ��Ȼ��ѧ����������Ŀ(11JJ3059)(Project (2008AA042802) supported by the National High-Tech Research and Development Program (863 Program); Project (KJ2013A141) supported by the Natural Science Key Project of Anhui Provincial Universities; Project (11JJ3059) supported by the National Science Foundation of Hunan Province)
ͨ�����ߣ������£���ʿ�����ڣ���ʿ����ʦ�����»�е�ṹ����ѧ��������ơ�ұ���е�о���E-mail��renwu88@126.com
ժҪ����Զ���ó��ۼ���ҵ��Ƶ��λ�˱任����Ƶ�ʲ����������⣬���ö��崫�ݾ������Ľڱۼܶ���ѧģ�ͣ�ģ�ͷ�ΪA��B 2����ϵͳ����ϵͳAΪ��1�ڱۡ�֧�������ӣ���ϵͳBΪ��3�ڱۡ������ӡ�����Һѹ���������˽µ��Ե�Ӱ�죬��������ģ�ͷ�װ����4�ֳ���λ�˵Ĺ���Ƶ�ʣ��������бۼ�ʵ��̨�Ͻ���ʵ����֤���о�������������ö��崫�ݾ�������λ�˶���ϵͳ�ۼܹ���Ƶ�ʱ����˴�ͳ�����������趨����IJ��裬4��λ�˼���µ��ԵĹ���Ƶ�ʾ�������½����Ҹ��ӽ�ʵ��ֵ��Ϊ�����е�ı�λ��Ƶ�ʼ��������ʵʱ�����ṩ�ο���
[3] ����, ����, ������, ��. �������ó��ۼ����Զ��嶯��ѧ��ģ�����[J]. ��е����ѧ��, 2007(11): 131-135.
[4] ����, ������. �������ó��ۼ�ϵͳ�������о�[J]. ������, 2011, 30(9): 259-263.
[5] ���к�, �μ���. ������ϵŤ����ѧ��ģ���編[J]. �й���ɫ����ѧ��, 2002, 12(2): 388-392.
[6] ���к�, �μ���, �Ӿ�. ����ϵͳͨ�ý�ģ����[J]. ���Ϲ�ҵ��ѧѧ��(��Ȼ��ѧ��), 2002, 33(5): 517-521.
[10] ����ͤ, �ֱ�. ����ϵͳ���ݾ����о���չ[J]. ��ѧ��չ, 2012, 42(1): 4-17.
[12] ������, ����, ��־��. �����˶�����϶�Ļ�����̬�����о�[J]. ������, 2011(11): 17-20.
