

DOI�� 10.11817/j.issn.1672-7207.2020.02.008
���ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ����
���ľ�1,������1,����2,������1,���1
��1. �㽭��ѧ ��е����ѧԺ���㽭 ���ݣ�310027��
2. �����ݴ�ѧ ��ѧ�о��ƣ��ձ� �����ݣ�4648603��
ժ Ҫ��
ͳ�İ�ȫ�Լ�����ת������������������ԣ����һ�ֻ��ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ����ϵͳ�ɻ��ղ����г����Զ��ܣ�ʵ���г��ƶ���Һϵͳ���Թ��ܣ�ͬʱ����ͨ�����Ƹ�Ƶ��ŷ��Ŀ���ʵ���ƶ�Һѹ��ѹ���ı������ơ����ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ����ԭ���������ƶ���Һϵͳ����ѧģ�ͣ���������Ӧģ��PID����������PWM�����ź�ռ�ձȣ����ظ�Ƶ��ŷ��Ŀ��ض�����ʵ���ƶ���Һϵͳѹ���ı������ơ�����AMESim/Simulink���Ϸ���ƽ̨���HSV(���ٿ��ط�)��Ƶ��ŷ��Ļ�е-����-Һѹ����ģ�ͼ�����Ӧģ��PID����������֤�ƶ�ϵͳ����Ч�ԡ��о�����������ƶ�Һѹ��ѹ����5~10 MPa�Ľ�Ծ�źŸ����У�����ʱ��Ϊ0.01~0.02 s�����������������0.66%���ƶ���Һϵͳ�Ķ�̬Ʒ���������ƶ�Һѹ��ѹ����5~10 MPa��б���źŸ����У�ѹ�������ͺ�ʱ���Ϊ0.10 s���������ֱ���-0.18~0.15 MPa��-0.20~0.25 MPa��ѹ����������С��ѹ�������ͺ��С�����ƾ��Ƚϸߣ��õ��˽��ŵ�ѹ�����ƽ����
�ؼ���:�г��ƶ�����Ƶ��ŷ���ģ��PID��ռ�ձȣ�ѹ�����ƣ����Ϸ���
��ͼ�����:TH137 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��02-0340-09
Simulation of electro-hydraulic system for train brake based on pressure control of high frequency solenoid valve
LI��Wenjing1, GONG��Guofang1, LIU��Jian2, ZHANG��Yakun1, YANG��Huayong1
(1. School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China��
2. Graduate School of Engineering, Nagoya University, Nagoya 4648603, Japan)
Abstract: Aiming at the security of train brake system and energy transformation, storage and recycle, a novel electro-hydraulic system for train brake based on pressure control of high frequency solenoid valve was proposed. The system can recycle part of the train inertial kinetic energy to realize the self-supply energy of the train braking electro-hydraulic system, and the proportional control of the brake hydraulic cylinder pressure by controlling the opening and closing of the high-frequency solenoid valve. According to the working principle of train brake electro-hydraulic system based on pressure control of high-frequency solenoid valve, a mathematical model of the brake electro-hydraulic system was established. An adaptive fuzzy PID controller was employed to adjust the duty cycle of PWM control signal and regulate the switching action of the high-frequency solenoid valve, and thereby pressure proportional control of the brake electro-hydraulic system was achieved. Taking advantage of the AMESim/Simulink joint simulation platform, the mechanical-electronic-hydraulic simulation model of HSV(high-speed switching valve) high-frequency solenoid valve and the adaptive fuzzy PID controller of train brake system were established, and the train brake system was verified.The results show that in the step signal tracking of the brake hydraulic cylinder pressure at 5-10 MPa, the raised time is 0.01-0.02 s, and the maximum overshoot is not more than 0.66%, which proves that the dynamic quality of the brake electro-hydraulic system is excellent. In the slope signal tracking of the brake cylinder pressure at 5-10 MPa, the pressure tracking lag time is both 0.1 s, and the error fluctuations are -0.18-0.15 MPa and -0.20-0.25 MPa, respectively. The pressure fluctuation range and the pressure tracking lag are little, which proves the control accuracy is better, and a better pressure control result is obtained.
Key words: train brake; high frequency solenoid valve; fuzzy PID; duty ratio; pressure control; co-simulation
�ƶ�ϵͳ���г������а�ȫ����������Ҫ�����á��ƶ���ʽ��Ҫ���������ƶ�������ƶ�������/�����ƶ����Ź������ƶ��������ƶ���Һѹ�ƶ���[1-2]�������ƶ����ÿ������䷧��̤���ƶ���/բ��ģʽ���ƶ��ס�����/���̵������ƶ���բƬģʽ��ǣ�������복��֮������ƶ���ʱ[3]�����⡣�쳤��[4]��������г�˫�ܹ��磬����г����������ƶ���ʱ���⡣�����ƶ������У��г��Ķ���ͨ���ƶ���/�ƶ�����բ��/բƬĦ��ȫ��ת�����������ģ����Ի�������������/�����ƶ��ĵ��ƶ�ģʽ���õ��衢���ݵȵ���Ԫ�����ƶ�ʱ�������ܣ�����������[5]�����ƶ�ϵͳ�����ŵ㣬������Ԫ���ڴ�����쳣�����������ջ�����ʧЧ[6]����������������ѧ�߿����˾����������չ��ܵ�Һѹ�ƶ�ϵͳ������Ч�ؽ��г����ֹ��Զ���ת��ΪҺѹ�ܣ����浽�������У��繬��Ϸ��[7]�������ձ�Linimo�������г���Һѹ�ƶ������ܹ�����[8]��������ñ���ѹ�����Ʒ��ĵ͵ذ���쳵���ƶ�Һѹϵͳ�����ϻ����[9]������г�Һѹ�ƶ�����̨��������Simulink��������̨�ƶ����̣���������[10]����˵�Һ����ƶ�ϵͳ������ƶ���ƽ���ԣ��������[11]��������ڳ��й����ͨ��Һѹ�������ϵͳ�����ñ�/������Ϊ����Ԫ����Һѹ�������洢���յ������ƶ���������Һѹ�ƶ�ϵͳ��ʹ�ÿ�Ƶ����������������ƶ�������Ƶ��ŷ�ͬ��������Ⱦ��м۸����С������ɿ�������Ⱦ����ǿ��й©���١����ϵͳ����ʵ������������ϵͳ���[12-13]���ص㡣����Ƶ��ŷ���ΪҺѹ�ƶ�ϵͳ��ѹ�����Ʒ���ͨ�����������ͨ�϶���ʵ��ѹ���ı������ƣ�������������������ͨ������������ʵ���ƶ�ϵͳ��˫���ƶ����ܣ��������ԡ���������г��ƶ��еİ�ȫ�Լ�����ת������������������ԣ�������ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ���ɻ����г��ƶ������еIJ��ֹ��Զ��ܡ�ͨ�����Ƹ�Ƶ��ŷ��Ŀ��գ�ʵ���ƶ�Һѹ��ѹ���ı������ơ�������ĸ�Ƶ��ŷ�ͨ����С����������ʹ�ã�����Ϊ�ȵ���ʹ��[14-15]��Ŀǰ�����ڶԸ�Ƶ��ŷ����о���Ҫ�����ڷ��ĵ��ϵͳ��Һѹ�����ϣ�������[16]��AMESim����ƽ̨�д��HSV��Ƶ��ŷ�ģ�ͣ����Զ�̬�;�̬���Խ����˷����о����ϰ����[17]ͨ������ó��ؿ�ռ�ձ���Ч������Χ�ķ���ṹ�ؼ����������պ͵�[18]�о��˸�Ƶ��ŷ������µ�Һѹ�������뵽λ�����е��ٶȿ��ơ����ǶԸ�Ƶ��ŷ������ѹ�������о�����Ը�Ƶ���ƣ�����������(pulse width modulation, PWM)[19]��ͨ������ռ�ձȸı䷧��ƽ����������Ƶ��Խ�ߣ���������Խ��[20]����������[21]ͨ������PWM��ѹ�źŵ�ռ�ձȣ�ʵ��ESP��Ƶ��ŷ�ѹ����ȷ���ƣ���ΰ���[22]ͨ���ı�PWM��ѹ�źŵ�ռ�ձȣ�ʵ���˸�Ƶ��ŷ��ı������ع��ܣ����պ͵�[23]���ýڵ���ǻ���Ը�Ƶ��ŷ���Һѹ��λ�ý��н�ģ���档��Ƶ��ŷ���ͨ������PWM��ѹ�źţ�ʵ�����ѹ���ľ��������ơ����ľ۽��ƶ���Һϵͳ�����ѹ�����ƣ�����ϵͳ����ѧģ�ͣ���������Ӧģ��PID����������PWM��ѹ�ź�ռ�ձȵĿ��Ʋ��ԣ����ظ�Ƶ��ŷ��Ŀ��ض��������������ƶ�Һѹ����������ƶ�ѹ��������AMESim/Simulink���Ϸ���ƽ̨���HSV��Ƶ��ŷ��Ļ�е-����-Һѹ����ģ�ͼ�����Ӧģ��PID����������֤�ƶ�ϵͳ����Ч�ԡ�
1 ��Ƶ��ŷ����г��ƶ���Һϵͳԭ��
1.1����Ƶ��ŷ��ṹ
HSVϵ�п���ʽ��Ƶ��ŷ�����ͨ��������ͨ���ա���ͨ��������ͨ���չ�4�����ͣ����У���ͨ�����͵Ľṹ��ͼ1��ʾ��������Ȧ�õ�ʱ�������ڵ�����������������˶��������Ƹ��ƶ�����ͨ���Ϳ�����Ϳڣ���������Ȧʧ��ʱ������ʧȥ�������������Һѹ��������¸�λ[24]����ʩ��һ��Ƶ�ʼ�ռ�ձȵ�PWM��ѹ�ź�ʱ����Ƶ��ŷ���30~50 Hz�Ŀ���Ƶ��ʵ�ֽ���-����·�ĸ���ͨ�ϡ�
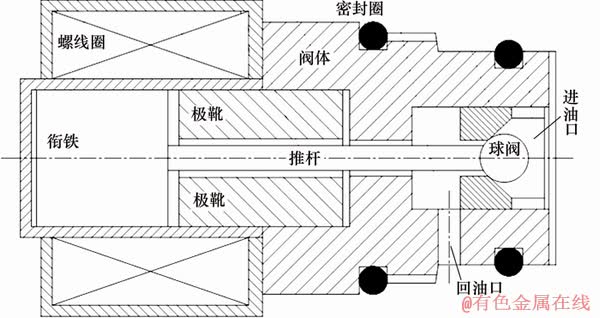
ͼ1��HSV��Ƶ��ŷ��ṹͼ
Fig. 1��Construction of HSV high frequency solenoid valve
1.2�����ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ
���ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ������4����λ��ͨ����ʽHSV��ŷ����ֱ������ƶ�Һѹ������·�ˣ����ɽ����ڶ������ڵ�Һѹϵͳ��ͼ2��ʾΪ�г��ƶ���Һϵͳԭ��ͼ��
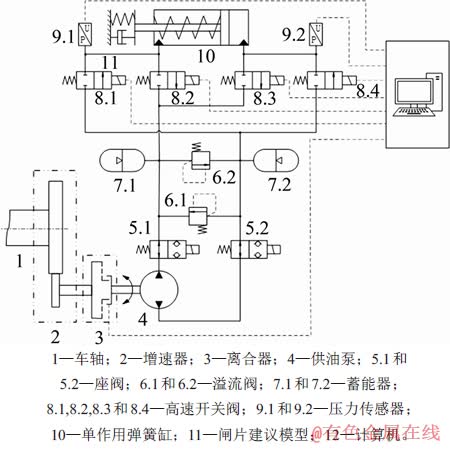
ͼ2���г��ƶ���Һϵͳԭ��ͼ
Fig. 2��Electro-hydraulic system for train brake
�г������ƶ�ʱ��������Ӻϣ�����ͨ����������������������ͱ���ת�����ϵͳ���ü������������ָ���ģʽ����ѹ���������������ƶ�Һѹ���и�ǻ����ǻ��ѹ�����бջ��������ƣ�����һ��ռ�ձȵ�PWM��ѹ�źſ��Ƶ�ŷ��Ŀ��ض����������Ƹ��ٿ���8.3����ٿ���8.1�����ƶ�Һѹ����ǻ�빩�ͱõ������·����ͨ�ϣ�ͬʱ�и�ǻ�����䲻��ͨ�ϣ������������ѹ�������£��˷������������н���բƬ�н��ƶ��̲����ƶ������ﵽ�����ƶ������ٿ���8.3�رգ����ƶ�Һѹ����ǻ������ѹ��ʵ���г��ƶ�����ˣ���ϵͳ�ɻ��ղ����г����Զ��ܡ�
���ƶ������У����ڹ��ԣ��г����ƶ����������¼����������У����ͱ����ɹ���������Һ����������7.1��Ϊ�´��ƶ����г�����ʱ��Һѹ��ʹ�á�������������Һ����������롣
���ٿ���8.4��8.2��������7.2���ƶ�Һѹ���빩�ͱù�����������ͬ�Ľ����ڶ�������Һѹϵͳ�������г���������ʱ�����г������ƶ�������������
2 ϵͳ��ѧģ��
����HSV���Ļ�е�ṹ�����ϵͳ��������Ƶ��ŷ��ƶ�ϵͳ�Ķ�̬ģ�͡���������Ȧͨ��ʱ����ѹ����Ϊ

ʽ�У�






��Ƶ��ŷ���Ŵ�·����Ϊ

ʽ�У�





������Ȧ���������ʱ�ĵ��������
ʽ�У�


�����Ǵ�©�����Ӳ�λ����϶Ӱ�죬�Է�оλ���������������г̼�������϶Ϊ����϶����ʱ���Ÿ�Ӧǿ��

��о�Ķ���ѧ����Ϊ

ʽ�У�




��Ƶ��ŷ��ڸ�Ƶ��PWM��ѹ�źſ����¿��أ��䷧о��ȫ�յ�ȫ���Լ�ȫ����ȫ�յ�ʱ�����ź����ڱȼ�С������Ϊ��ֻ��ȫ����ȫ��2�ֶ���״̬��������Ϊ����������ռ�ձȳ����Թ�ϵ[22-23]����ռ�ձ�Ϊ


ʽ�У�

ʽ�У�


�ƶ�Һѹ�Ķ���ѧ����Ϊ

ʽ�У�







3 �ƶ�ѹ��������Ӧģ��PID���Ʋ���
�г����ƶ������У��ƶ�ѹ�����ƶ����ٶȺ���·������ء���ʽ(6)~(8)��֪����ͬ�ƶ�ѹ����Ҫ�Ը�Ƶ��ŷ�ʩ�Ӳ�ͬռ�ձȵ�PWM��ѹ�źš���ͨ��PID���������������г��ƶ��������ƶ�ѹ���Ĵ�Χ���߾��ȿ������ԣ�ͼ2�м�������Ƶĵ��ϵͳ����������Ӧģ��PID����������PWM���Ƶ�ѹ�ź�ռ�ձȣ��ɻ���г��ƶ���Һϵͳ���õ�³���ԣ��Ҹ�����Ч�����Ƴ�������С��������ˣ�����Ӧģ��PID���Ʋ������ڱ���������ƶ���Һϵͳ��
����Ӧģ��PID���Ʋ�����ͼ3��ʾ�����������ѹ����ʵ�����ѹ���������仯��Ϊ���룬����ģ���������ģ����������ѯģ��������PID��3������[25]���봫ͳPID��������ȣ�����ʵ���ڲ�ͬ���������仯����PID����������������Ӧ����[26]��

ͼ3������Ӧģ��PID���Ʋ���
Fig. 3��Adaptive fuzzy PID control strategy
4 ������
�����г�����������ʱ���ƶ���Һϵͳ�ƶ�������ͬ����ȡ�г���������ʱ�ƶ���Һϵͳ�Ĺؼ�����Ԫ�������з��档ѡȡ�ѹ��Ϊ20 MPa�������Ϊ9 L/min��Ƶ��Ϊ50 Hz��HSV��Ƶ��ŷ���100/70���ĵ����õ��ɸף���AMESim����ƽ̨����ĵ�š���е��Һѹģ�ͼ��ƶ���Һϵͳģ�ͣ�����ģ����ͼ4��ʾ����ͼ4�ɼ������ͱõĶ�����������õ��Ԫ�����ƶ�Һѹ�����ڸ�����1����Ƶ��ŷ�ģ�ͽ����ƶ����̷��棬բƬʹ�õ�������Ԫ������ģ�⡣���Ľӿ�ģ�齫����ѹ���źż�ʵ�����ѹ���źŴ�����Simulink��S-Functionģ�顣
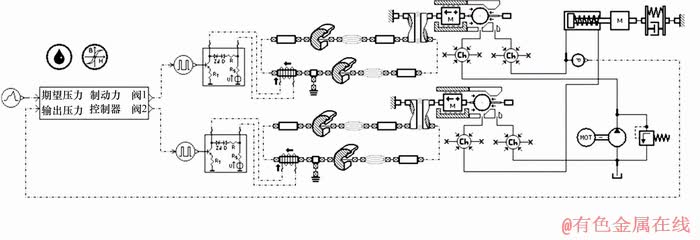
ͼ4���г��ƶ���Һϵͳ����ģ��
Fig. 4��Simulation model of train brake system
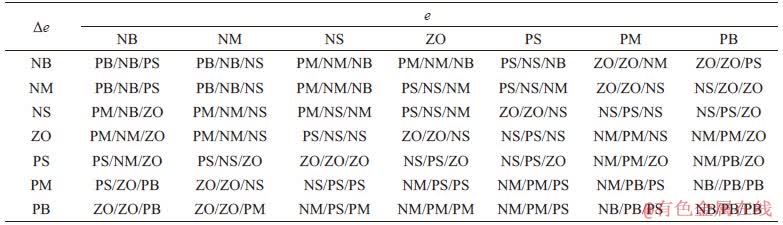
ͬʱ����Simulink�д����Ӧģ��PID����������ͼ5��ʾ������Z-N������PID�������ı���ϵ��kp�����ϵ��ki����ϵ��kd�ֱ�Ϊ8��0.8��0.001��ͨ��MATLAB�Ľű��ļ���дģ�������ص�ģ����ģ�飬��ѹ����ѹ�����仯��������ģ����ģ�飬ͨ��ģ������õ��ʵ���PID����������ѹ�����e��ѹ�����仯�ʡ�e������ϵ����������Kp������ϵ����������Ki����ϵ����������Kd��ģ���Ӽ�������Ϊ{NB, NM, NS, ZO, PS, PM, PB}��������Ӧ������ֱ����Ϊ{-3, -2, -1, 0, 1, 2, 3}��{-30, -20, -10, 0, 10, 20, 30}��{-1.2, -0.8, -0.4, 0, 0.4, 0.8, 1.2}��{-0.3, -0.2, -0.1, 0, 0.1, 0.2, 0.3}��{-0.003, -0.002,-0.001, 0, 0.001, 0.002, 0.003}�����������������Ⱥ���ģ����������������ģ������������1��ʾ�����������������ƽ������ģ����������ռ�ձȿ����ź���S-Function������AMESim��PWMԪ��������HSV���Ŀ��أ�ʵ��ͼ3��ʾ���Ʋ��ԡ�
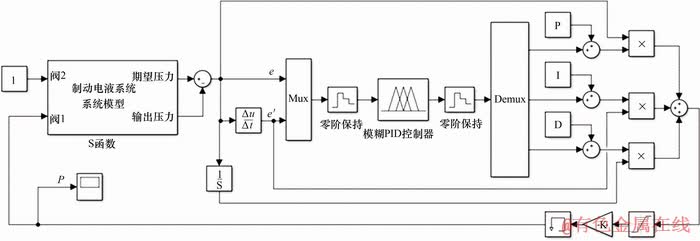
ͼ5������Ӧģ��PID����������ģ��
Fig. 5��Simulation model of adaptive fuzzy PID controller
��1����Kp/��Ki�͡�Kd��ģ�����ƹ����
Table 1��Table of fuzzy control rules of ��Kp, ��Ki and ��Kd
�ڿ��ع����£�ѡȡռ�ձȷֱ�Ϊ0.2��0.5��0.8��Ƶ��Ϊ50 Hz��PWM��ѹ�źŸ�4�����ڽ��з��棬��Ƶ��ŷ��ķ��ڿ���������������ͼ6��ʾ����ͼ6�ɼ������ڿ�ʼ������ʱ����PWM��ѹ�ź���ȣ�����3 ms���ҵ��ӳ٣���Ϊ���ͺ�ʱ���������¡�ͨ����Ƶ��ŷ��������뷧�ڿ������Ӧ�������ʷ��β�����1�������ڵ�ƽ��������ʽ(6)�����������
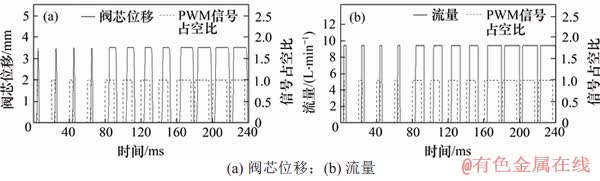
ͼ6����ͬռ�ձ�PWM�ź��·��ڿ�������������
Fig. 6��Curves of valve opening and flow versus PWM signal with different duty cycles
������ѹ���ֱ��ǽ�Ծ�źź�б���ź�Ϊ����Ŀ�꣬��ѹ�����ٽ������Ϸ��棬�����ͼ7~9��ʾ��
��ͼ7�ɼ���5��10 MPa���ƶ�Һѹ��ѹ����ʼ����ʱ���Ϊ3~4 ms����ΪHSV���Ŀ��������е��ͺ�ʱ���������¡�ѹ����ʼ����ʱ��ռ�ձ������ѹ���ﵽ����ѹ��ʱ��ռ�ձ��½���0������PWM��ѹ�ź�Ϊ0�����ڳʹر�״̬�������ƶ�Һѹ��ѹ���������������У�ѹ��������ʱ��ֱ�Ϊ0.01��0.02 s�����������0.66%���¡���������ƶ���Һϵͳ�Ķ�̬Ʒ��������������Ӧģ��PID���Ʋ����£��ƶ�ѹ�������г��ƶ������еĿ�����ӦҪ��
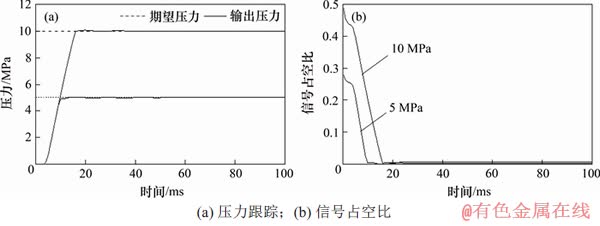
ͼ7����Ծ�źŵ�ѹ�����ٺ�ռ�ձ�����
Fig. 7��Tracking trajectory of step input signal of output and duty cycle
��ͼ8(a)�ɼ�������ѹ����3 s�ڴ�0 MPa����5 MPa����5 MPa����ѹ�����������У���ʼ��0.1 s���ƶ�Һѹ��ѹ��δ������֮��Ѹ��������������ѹ������0.4 sʱ������ѹ���������ϡ���ͼ8(b)�ɼ����˼��������Ϊ-0.18~ 0.15 MPa���ƶ�Һѹ��ѹ���ڵ���3 sʱ�����ӽ�5 MPa����ʱռ�ձȼ����½���0�����ڳʹر�״̬��
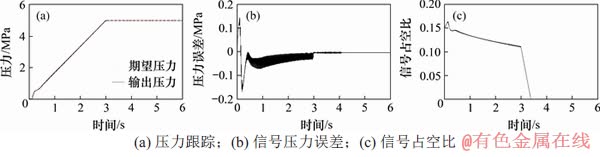
ͼ8��5 MPaб���źŵ�ѹ�����١�����ռ�ձ�����
Fig. 8��Tracking trajectory of 5 MPa ramp input signal: output, error, and duty cycle

ͼ9��10 MPaб���źŵ�ѹ�����١�����ռ�ձ�����
Fig. 9��Tracking trajectory of 10 MPa ramp input signal: output, error and duty cycle
��ͼ9�ɼ������������3 s�ڴ�0 MPa����10 MPa����10 MPa��ѹ������������ͼ8��ʾ���߱仯������ͬ���ڿ�ʼ��0.1 s���ƶ�ѹ��δ������֮��Ѹ����������0.5 sʱ������ѹ�������Ǻϣ��ڴ˽Σ����������-0.20~0.25 MPa����������ƶ�ѹ�������ͺ��С�����ƾ��Ƚϸߣ������г��ƶ������е��ƶ�ѹ����ΧҪ��
5 ����
1) ����������г��ƶ���Һϵͳ�����г��ƶ�����Ч�ģ��Ҳ�������Ӧģ��PID����������PWM��ѹ�ź�ռ�ձȵĿ��Ʋ��ԣ��������г��ƶ�ѹ����Χ���ƾ��ȸߵļ���Ҫ��
2) �ƶ�Һѹ��ѹ����5~10 MPa�Ľ�Ծ�źŸ����У�����ʱ��ֱ�Ϊ0.01 s��0.02 s�����������������0.66%���ƶ���Һϵͳ�Ķ�̬Ʒ��������
3) �ƶ�Һѹ��ѹ����5~10 MPa��б���źŸ����У�ѹ�������ͺ�ʱ���Ϊ0.1 s���������ֱ�-0.18~0.15 MPa��-0.2~0.25 MPa��ѹ����������С��ѹ�������ͺ��С�����ƾ��Ƚϸߣ��õ��˽��ŵ�ѹ�����ƽ����
4) �����Ĺ����������о�������ĵ�Һ�ƶ�ϵͳ�������������Լ��������е�Ӧ��Ч����
�ο����ף�
[1] �Ž���, ����ˮ, �ߴ��, ��. �����г��ƶ���������[J]. �����紫��, 2011(4): 1-4.
ZHANG Jianbai, PENG Huishui, NI Dacheng, et al. Overviewing braking technology of the high-speed trains[J]. Electric Drive for Locomotives, 2011(4): 1-4.
[2] ��ԥ��, ������, ��. �г��ƶ�ϵͳ������״����չ����[J]. ����������ǹ쳵��, 2014, 37(5): 1-4.
LIU Yuxiang, FANG Changzheng, WAN Jianbing. Technology status and development trend of train braking system[J]. Electric Locomotives & Mass Transit Vehicles, 2014, 37(5): 1-4.
[3] �����, ���, ����. ���й������ǣ����̬���Խ�ģ��ʵ��ϵͳ�о�[J]. ����ѧ��, 2012, 34(7): 36-42.
SONG Ruigang, YANG Jian, FANG Yu. Research on modeling of dynamic traction characteristics and test system of urban rail vehicles[J]. Journal of the China Railway Society, 2012, 34(7): 36-42.
[4] �쳤��. ��������г��ƶ���·���켰����[J]. ��������, 2014, 34(S1): 307-310.
ZHU Changsong. Rehabilitation of and analysis on pneumatic braking of mining marshaling train [J]. Tunnel Construction, 2014, 34(S1): 307-310.
[5] ����ϼ, ���崺, �۴���, ��. ��϶��������ƶ�����ɢ�����������о�[J]. �����붯������, 2015(3): 25-29.
SUN Xiaoxia, WANG Yichun, SHAO Chunming, et al. Experimental research on braking resistor heat dissipation performance of hybrid electric vehicle[J]. Vehicle & Power Technology, 2015(3): 25-29.
[6] ���, ���, �����, ��. ���й����ͨ�����ƶ��������ռ�����״���о���չ[J]. ����ѧ��, 2011, 33(2): 26-33.
YANG Jian, LI Fayang, SONG Ruigang, et al. Review of the utilization of vehicular braking energy in urban railway transportation[J]. Journal of the China Railway Society, 2011, 33(2): 26-33.
[7] ����Ϸ�, ��ǧ��. �������г���Һѹ�ƶ���[J]. �������������붯��, 2017(3): 34-37.
AOUI Tokio , CAI Qianhua. Hydraulic brake for maglev train [J]. Foreign Railway Locomotive and Motor Car, 2017(3): 34-37.
[8] �ܹ���, ���ܻ�, ���. �����͵ذ���쳵���ƶ�ϵͳ����[J]. ���й����ͨ�о�, 2012, 15(2): 111-114.
CAO Guoli, ZENG Xianhua, LIU Rui. Braking system for domestic low-floor light rail transit vehicles [J]. Urban Mass Transit, 2012, 15(2): 111-114.
[9] ���ϻ���, �ν���, ������. �г�Һѹ�ƶ�����̨��������о�[J]. ������Һѹ, 2016, 44(11): 132-134.
WU Thihoaithu, SONG Jinchun, FAN Wenming. Design and research of train hydraulic brake tester[J]. Machine Tool & Hydraulics, 2016, 44(11): 132-134.
[10] ������, ����, ������,��. �е��ٴŸ��г��ƶ�ϵͳ������о�[J]. ����������ǹ쳵��, 2017(3): 18-22.
JIANG Lianhua, TANG Liang, ZENG Chunjun, et al. Design and research on braking system of mid-low speed maglev train [J]. Electric Locomotives & Mass Transit Vehicles, 2017(3): 18-22.
[11] ������, ��ά. Һѹ��������ڳ��й����ͨ�е�Ӧ���о�[C]//�ھŽ�ȫ�����崫�������ѧ������(9th FPTC-2016)���ļ�. ����, 2016: 270-274.
ZHANG Liuyang, WU Wei. An application of hydraulic hybrid system for urban rail transit [C] // 9th FPTC-2016. Hangzhou: 2016: 270-274.
[12] OUYANG Xiaoping, YANG Huayong, JIANG Haoyi, et al. Simulation of the piezoelectric high-speed on/off valve[J]. Science Bulletin, 2008, 53(17): 2706-2711.
[13] LINJAMA M, LAAMANEN A, VILENIUS M. Is it time for digital hydraulics? [C] // The Eighth Scandinavian International Conference on Fluid Power. Tampere: [s. n.], 2003.
[14] ���İ�, �, ��ʤ. 2D���ٿ��ط��ṹ�����Ż������ʵ��[J]. ũҵ��еѧ��, 2016, 47(11): 391-398.
JIA Wenang, RUAN Jian, LI Sheng. Structure parameters optimization and experiments on 2D high-speed on-off valve [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 391-398.
[15] WANG Feng, GU Linyi, CHEN Ying. A continuously variable hydraulic pressure converter based on high-speed on-off valves[J]. Mechatronics, 2011, 21(8): 1298-1308.
[16] ����, ����. ����AMESim�ĵ�Ÿ��ٿ��ط�����̬�����о�[J]. Һѹ������, 2010(2): 68-72.
SU Ming, CHEN Lunjun. Dynamic characteristic research of high speed on-off solenoid valve based on AMESim[J]. Chinese Hydraulics & Pneumatics, 2010(2): 68-72.
[17] �ϰ���, ��ΰ��, �ν�, ��. ���ٿ��ط���Ƶ�������ƿ�����Чռ�ձȹ�����Χ���ؿ�[J]. ��е����ѧ��, 2012, 48(10): 167-172.
MENG Aihong, WANG Weiwei, SONG Jian, et al. Extending of the duty ratio range of pulse width modulation control on high speed on-off valve[J]. Journal of Mechanical Engineering, 2012, 48(10): 167-172.
[18] ���պ�, �κ���, ��־��, ��. ���ٿ��ط���Һѹ�����뵽λ�����е��ٶȿ����о�[J]. �й���е����, 2013, 24(1): 47-51.
GAO Qinhe, SONG Haizhou, LIU Zhihao, et al. Research on speed control in starting and stopping processes of hydraulic cylinder with HSV[J]. China Mechanical Engineering, 2013, 24(1): 47-51.
[19] ����, ���, �Ĺ�, ��. ����PWM����ģʽ�ĸ��ٿ��ط��������Է������Ż�[J]. �Ϸʹ�ҵ��ѧѧ��(��Ȼ��ѧ��), 2016, 39(9): 1199-1204.
WANG Qiong, WU Hui, XIA Guang, et al. Analysis and optimization of switching characteristics of high speed on-off solenoid valve based on PWM control mode[J]. Journal of Hefei University of Technology(Natural Science), 2016, 39(9): 1199-1204.
[20] ZHU Kangwu, GU Linyi, CHEN Yuanjie, et al. High speed on/off valve control hydraulic propeller[J]. Chinese Journal of Mechanical Engineering, 2012, 25(3): 463-473.
[21] ������, ����, ��Զΰ. ����PWM���Ƶ�ESP���ٿ��ط�����ѧ�����о������[J]. ��е���������, 2015(12): 87-90.
WANG Dongliang, CHEN Nan, LIU Yuanwei. Dynamics research and simulation of high-speed on-off solenoid value of automotive electronic stability program based on PWM control[J]. Machinery Design & Manufacture, 2015(12): 87-90.
[22] ��ΰ��, �ν�, ����, ��. ���ٿ��ط��ڸ�ƵPWM�����µı�������[J]. �廪��ѧѧ��(��Ȼ��ѧ��), 2011, 51(5): 715-719.
WANG Weiwei, SONG Jian, LI Liang, et al. High speed on-off solenoid valve with proportional control based on high frequency PWM control[J]. Journal of Tsinghua University(Science and Technology), 2011, 51(5): 715-719.
[23] ���պ�, ��־��, ţ����. �����Ż��ĸ��ٿ��ط���Һѹ��λ�ÿ����о�[J]. ��е��ѧ�뼼��, 2015, 34(6): 903-909.
GAO Qinhe, LIU Zhihao, NIU Hailong. Controlling position of hydraulic cylinder with high-speed on-off valve parameters optimized[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(6): 903-909.
[24] ����, Ҧ���, �ξ�, ��. ���ٿ��ط����о���״[J]. �й����̻�еѧ��, 2011, 9(3): 351-358.
DING Fan, YAO Jiandi, DA Jing, et al. Advances on high-speed on-off valves[J]. Chinese Journal of Construction Machinery, 2011, 9(3): 351-358.
[25] ��С��, ������, ������. ����Һλ���ŷ�ϵͳ������Ӧģ��PID���������[J]. ̫ԭ�Ƽ���ѧѧ��, 2007, 28(6): 457-460.
LIN Xiaolian, DUAN Suolin, BI Youming. Design of a self-adaptive fuzzy PID controller for valveless electro-hydraulic position servo system[J]. Journal of Taiyuan University of Science and Technology, 2007, 28(6): 457-460.
[26] CHEN Jian, SHU Jianping, LI Mian, et al. Research on novel self-spinning high speed on/off valve based on fuzzy-logic parameter self-tuning PID controller[J]. Advanced Materials Research, 2012, 468/469/470/471: 1448-1452.
���༭ ��������
�ո����ڣ� 2019 -05 -17; �����ڣ� 2019 -08 -10
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675472)�������ص�����о���չ�ƻ�(973�ƻ�)��Ŀ(2015CB058100��2015CB058103)�������ص��з��ƻ���Ŀ(2017YFB1302600��2017YFB1302602��2017YFB1302604)������ʡ�ش�Ƽ�ר��(161100211100) (Project(51675472) supported by the National Natural Science Foundation of China; Projects(2015CB058100, 2015CB058103) supported by the National Basic Research Development Program (973 Program) of China; Projects(2017YFB1302600, 2017YFB1302602, 2017YFB1302604) supported by the National Key Research and Development Program of China; Project(161100211100) supported by Major Science and Technology Program of Henan Province)
ͨ�����ߣ�����������ʿ�����ڣ����µ�Һ����ϵͳ�о���E-mail��gfgong@zju.edu.cn
ժҪ:����г��ƶ�ϵͳ�İ�ȫ�Լ�����ת������������������ԣ����һ�ֻ��ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ����ϵͳ�ɻ��ղ����г����Զ��ܣ�ʵ���г��ƶ���Һϵͳ���Թ��ܣ�ͬʱ����ͨ�����Ƹ�Ƶ��ŷ��Ŀ���ʵ���ƶ�Һѹ��ѹ���ı������ơ����ڸ�Ƶ��ŷ�ѹ�����Ƶ��г��ƶ���Һϵͳ����ԭ���������ƶ���Һϵͳ����ѧģ�ͣ���������Ӧģ��PID����������PWM�����ź�ռ�ձȣ����ظ�Ƶ��ŷ��Ŀ��ض�����ʵ���ƶ���Һϵͳѹ���ı������ơ�����AMESim/Simulink���Ϸ���ƽ̨���HSV(���ٿ��ط�)��Ƶ��ŷ��Ļ�е-����-Һѹ����ģ�ͼ�����Ӧģ��PID����������֤�ƶ�ϵͳ����Ч�ԡ��о�����������ƶ�Һѹ��ѹ����5~10 MPa�Ľ�Ծ�źŸ����У�����ʱ��Ϊ0.01~0.02 s�����������������0.66%���ƶ���Һϵͳ�Ķ�̬Ʒ���������ƶ�Һѹ��ѹ����5~10 MPa��б���źŸ����У�ѹ�������ͺ�ʱ���Ϊ0.10 s���������ֱ���-0.18~0.15 MPa��-0.20~0.25 MPa��ѹ����������С��ѹ�������ͺ��С�����ƾ��Ƚϸߣ��õ��˽��ŵ�ѹ�����ƽ����
[1] �Ž���, ����ˮ, �ߴ��, ��. �����г��ƶ���������[J]. �����紫��, 2011(4): 1-4.
[2] ��ԥ��, ������, ��. �г��ƶ�ϵͳ������״����չ����[J]. ����������ǹ쳵��, 2014, 37(5): 1-4.
[3] �����, ���, ����. ���й������ǣ����̬���Խ�ģ��ʵ��ϵͳ�о�[J]. ����ѧ��, 2012, 34(7): 36-42.
[4] �쳤��. ��������г��ƶ���·���켰����[J]. ��������, 2014, 34(S1): 307-310.
[5] ����ϼ, ���崺, �۴���, ��. ��϶��������ƶ�����ɢ�����������о�[J]. �����붯������, 2015(3): 25-29.
[6] ���, ���, �����, ��. ���й����ͨ�����ƶ��������ռ�����״���о���չ[J]. ����ѧ��, 2011, 33(2): 26-33.
[7] ����Ϸ�, ��ǧ��. �������г���Һѹ�ƶ���[J]. �������������붯��, 2017(3): 34-37.
[8] �ܹ���, ���ܻ�, ���. �����͵ذ���쳵���ƶ�ϵͳ����[J]. ���й����ͨ�о�, 2012, 15(2): 111-114.
[9] ���ϻ���, �ν���, ������. �г�Һѹ�ƶ�����̨��������о�[J]. ������Һѹ, 2016, 44(11): 132-134.
[10] ������, ����, ������,��. �е��ٴŸ��г��ƶ�ϵͳ������о�[J]. ����������ǹ쳵��, 2017(3): 18-22.
[14] ���İ�, �, ��ʤ. 2D���ٿ��ط��ṹ�����Ż������ʵ��[J]. ũҵ��еѧ��, 2016, 47(11): 391-398.
[16] ����, ����. ����AMESim�ĵ�Ÿ��ٿ��ط�����̬�����о�[J]. Һѹ������, 2010(2): 68-72.
[21] ������, ����, ��Զΰ. ����PWM���Ƶ�ESP���ٿ��ط�����ѧ�����о������[J]. ��е���������, 2015(12): 87-90.
[23] ���պ�, ��־��, ţ����. �����Ż��ĸ��ٿ��ط���Һѹ��λ�ÿ����о�[J]. ��е��ѧ�뼼��, 2015, 34(6): 903-909.
[24] ����, Ҧ���, �ξ�, ��. ���ٿ��ط����о���״[J]. �й����̻�еѧ��, 2011, 9(3): 351-358.
