
DOI: 10.11817/j.issn.1672-7207.2015.04.018
ȫ���ֲ���Ƶ�ʲ�������
����ά����������������ŷ��
(�����Ƽ���ѧ ���ӿ�ѧ�빤��ѧԺ������ ��ɳ��410073)
ժ Ҫ��
��ϵͳ��ԭ��Ƶ�ʱ��ĸ߾���Ƶ�ʲ����������һ��ȫ���ֲ���Ƶ�ʲ����������Ա����Ƶ���ź�ֱ�ӽ������ֲ������Խ��ģ�����Ƶ�ʲ����������¶�Ӱ�������⡣���������Ȼ����ʵ����λ���ƣ�������λ������Ƶ�ʲ�����������С����ֵȥ�봦����һ�������λ���ƾ��ȡ��о�������������������Ϊ1 s�����Ƶ���Ϊ3 000ʱ��Ƶ�ʲ�������Ϊ2.0��10-14 /s������С����ֵȥ�봦����Ƶ�ʲ������ȴﵽ10-15 /s������
�ؼ��ʣ�
Ƶ�ʲ�������������λ������С����ֵȥ����
��ͼ����ţ�TF803.21 ���ױ�־�룺A ���±�ţ�1672-7207(2015)04-1296-06
All-digital beat-frequency measurement method for precise frequency standard comparison
ZHU Xiangwei, GONG Hang, HUANG Xinming, OU Gang
(School of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Abstract: An all-digital beat-frequency measurement method was proposed to meet high measurement requirement of atomic oscillators widely used in global position system. The measurement frequency signal was directly sampled without any analogue processing to avoid the influence on environment. The method adopted the maximum likelihood estimation (MLE) to acquire phase estimation values, and frequency measurement was realized by phase difference estimation. The wavelet threshold de-noising was introduced to improve the precision of phase estimation. Performance of the method was analyzed and verified by simulation. The results show that when the frequency measurement precision reaches 2.0��10-14 /s and measurement points reaches 3 000, the frequency measurement precision reaches 10-15 /s order with wavelet threshold de-noising.
Key words: frequency measurement; beat-frequency; phase estimation; wavelet threshold de-noising
�������ǵ���ϵͳ�ķ�չ���䶨λ����Խ��Խ�ߣ���ӦƵ�ʱ���ȷ�Ⱥ��ȶ�����ߵ÷dz��죬Ŀǰ����ϵͳ�����õ�ԭ��Ƶ�ʱ����뼶�ȶ����ܴﵽ10-15/s�������ߣ���Ӧ�ضԾ���Ƶ�ʲ��������IJ�����������˽ϸ�Ҫ��[1-2]�����ǵ���ϵͳ��ʹ�õ�ԭ��Ƶ�ʱ����ھ���Ƶ�ʱ������Ƚϸߣ��Բ��������������豸����������������Ҫ����ͨƵ�ʲ���Ҫ��ߵöࡣ���õľ���Ƶ�ʱ���������������λ�ȶԷ�����Ƶ����˫��Ƶ��ʱ�������[3-4]�����У���λ�ȶԷ�����������Ƶ��ȷ�Ⱥͳ���ָ��ıȶԣ���2�ַ�����Ҫ���ڶ����ȶ��ȵıȶԡ����෨�㷺������Ƶ��ȷ�Ⱥͳ����ȶ��ȵIJ��������Դﵽ�ܸߵıȶԾ��ȣ��ȶԵ�������Ϊ10-16 /s�������ɴ˿�����������Ƶ���ȶ��ȡ�Ƶ�ʵij�����ָ��ȣ������෨��ʱ����Ӧ�Ƚ������������ڶ���ָ��ȶ��С�˫��Ƶʱ������ľ��Ƚϸߣ���ʱ�����IJ���Ҫ�ߣ���������������ܵ��Ŵ�������Ƶ������������[4]�����ķ����нϸߵ�Ƶ�ʲ����ֱ��ʣ����������ȸߣ�ͨ����Ƶ�������������˲������ӱ������Ҽ�����ֻ��Ҫ����Ƶ�źţ������ڼ�������ʵ�֣�����������ʱ�꾫���Լ����ڶ��ź�������������豸���������������˲������ȵ����[4]�����ڲ��IJ�����������Щ���ԣ����Կ��ǶԲ���Ƶ�ʲ�����ʵ�ֽṹ����������ƣ��������ֻ��������иĽ�[5-7]�����Ľ����ܹ���߲������ȣ������ֻ���IJ��IJ�Ƶ��������������ȣ������нϸ�Ƶ�ʲ����ֱ����Լ����������ơ�����[4��8]����˻������������IJ���Ƶ�ʼƣ���Ȼ�������ȴﵽ��10-14 /s����ʵ�ַ�������Ȼ����ģ���Ƶ��ģ�飬û�г���������ֻ������ơ�Ϊ�ˣ������������һ��ȫ���ֻ�����Ƶ�ʲ���������ͨ�������źŴ�����������ɸ߾���Ƶ�ʲ�����
1 ����Ƶ�ʲ�����
����Ƶ�ʲ�����һ��ͨ����ͨ�����ڼ�������ø߷ֱ��ʵľ���Ƶ�ʲ�������[4, 8]�������ԭ����ģ���Ƶ�����ڼ������������ź�����Ϊ�ο��Ļ�Ƶ���źŽ��л�Ƶ�������Եõ������ź�����ڲο��źŵ�Ƶ���źż������źš����ڲ����ź�Ƶ�ʽϵͣ��ʿ��Բ�����ͨ�������Բ����ź����ڽ��м�����ʵ�ֶ�Ƶ�ʽ��в���������Ƶ�ʲ�����ͨ����ȡ�����ź�����ڲο��źŵ���λ����Ϣ��Ϊ�����źţ��õ��IJ����ź�Ƶ��ԶС��ԭ�����źţ���ˣ���ֱ�Ӳ�Ƶ����ȣ��������˲����ֱ��ʡ�����Ƶ�ʲ�������ԭ����ͼ1��ʾ����Ƶ������������ź��Ⱦ����Ŵ���������Ȼ��õ������������Ͷ��г���IJ����źţ� ͨ����ͨ�˲����˳�г������������������ڼ�����������
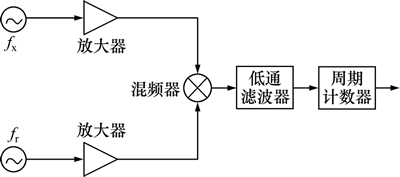
ͼ1 ����Ƶ�ʲ�����ԭ����ͼ
Fig. 1 Schematic diagram of beat-frequency measurement method
���ڻ�Ƶ��Ƶ�ʵ��±�Ƶ���ã����Խ�Ƶ�ʲ����ֱ�����߲������ӱ������磬������Ƶ�ʱ��ֵfxΪ10 MHz���ο�Ƶ��frΪ10 Hz��10 MHzʱ����Ƶ��IJ����ź�Ƶ��F=10 Hz����������ʱ��Ϊ0.1 ��s�����ɼ����������������ڲ����������Ϊ
 (1)
(1)
���������Ϊ
 (2)
(2)
�ֱܷ���Ϊ
 (3)
(3)
�����������£�����Ƶ�ʲ�������ֱ���ü��������ֱ�������˲������ӱ���
����Ƶ�ʲ�������Ҫ�����Դ���˼���������Ĵ�������������⣬��Ӧ�ð�����Ƶ������ͨ�˲�������������������Բ��������Ӱ�졣
2 ȫ���־���Ƶ�ʲ�������
2.1 ����ԭ��
ȫ���־���Ƶ�ʲ���������ʵ�ֿ�ͼ��ͼ2��ʾ������ֱ�Ӳ����ķ�ʽʵ��ȫ���ֻ������������ֶ˶Դ����źŽ��л�Ƶ�������õ������źţ�Ȼ��ͨ�������źŴ����ķ���ʵ�־���Ƶ�ʲ������������ϵIJ�Ƶ��ͨ����λ����ʵ�ֵģ������ȵõ���λ�Ĺ���ֵ��Ȼ��������λ��ֵõ�Ƶ�ʹ���ֵ��
�����Ƶ�ʱ��ֵfx���ο�Ƶ��Ϊfr����Ƶ��IJ����ź�Ƶ��fp=fx-fr���Ա����źŲ������źſ��Ա�ʾΪ
 (4)
(4)
���У�fsΪ����Ƶ�ʣ�TΪ��ɢ����������������Ƶ��·�õ��IJ����źſ��Ա�ʾΪ


 (5)
(5)
�Բ����źŵ�I/Q֧·�ֱ���е�ͨ�˲��ͳ�ȡ�Ȳ�����Ȼ��Բ����źŽ���Ƶ�ʹ��ƴӶ����Ƶ�ʲ��������ֻ�����Ƶ�ʲ���ͨ����λ�������Ƶ�ʵľ��ܲ��������־���Ƶ�ʲ�����ԭ��ͼ��ͼ3��ʾ��
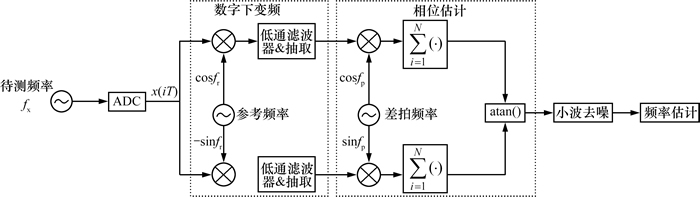
ͼ2 ���ֻ�����Ƶ�ʲ�����ԭ����ͼ
Fig. 2 Schematic diagram of digital beat-frequency measurement method
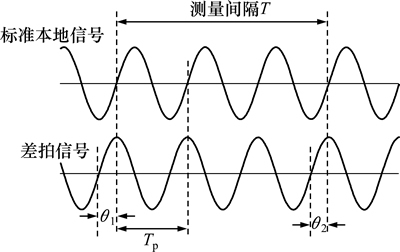
ͼ3 ���־���Ƶ�ʲ�����ԭ��ʾ��ͼ
Fig. 3 Schematic diagram of digital precise frequency measurement
��1�β������T�ڼ���Ƶ�2����λֵ�ֱ�Ϊ��1����2��1�β������ں���L���������ڣ����������ϲ����õ��IJ���Ƶ�ʿɱ�ʾΪ
 (6)
(6)
���У� Ϊ��õ�����������Ƶ�ʲ��֣�
Ϊ��õ�����������Ƶ�ʲ��֣� Ϊͨ����λ����ֵ��ֵõ��ľ���Ƶ�ʲ���ֵ����ʽ(6)���Կ�����������˲���Ƶ�ʲ���ֵ�����ϲο�Ƶ��fr�����Եõ�����Ƶ�ʵ�Ƶ�ʲ���ֵΪ
Ϊͨ����λ����ֵ��ֵõ��ľ���Ƶ�ʲ���ֵ����ʽ(6)���Կ�����������˲���Ƶ�ʲ���ֵ�����ϲο�Ƶ��fr�����Եõ�����Ƶ�ʵ�Ƶ�ʲ���ֵΪ ��
��
���Կ���Ƶ�ʹ��Ƶľ��Ⱥ���λ���ƾ���ֱ����أ����������λ���Ʒ������侫�ȣ�Ȼ�����Ƶ�ʹ��Ʒ������侫�ȣ��Ӷ��ó��·����IJ������ȡ�
2.2 ��λ���Ʒ���
�����õ����ź��������źţ���ˣ����ĵ���λ���������Ǹ�˹�������µ���֪���Ⱥ�Ƶ�ʵ������źŵ���λ�������⡣��λ���ƿ��Բ��������Ȼ����(MLE)���÷�������Ϊ������ƫ�ĺͽ����ﵽCRLB����ˣ����ǽ�����ѵġ���������[9-10]�������ź���λ��MLE���Խ��Ʊ�ʾΪ
 (7)
(7)
ͬ����������[9]����ɢ������Ƶ����֪�����źŵ���λ���Ʒ���Ϊ
 (8)
(8)
���У�AΪ�źŷ��ȣ�NΪ���ڹ��ƵIJ�����������2Ϊ��˹�����������λ����ʱ������� ��
��
2.3 Ƶ�ʹ��Ʒ���
�õ���λ����ֵ�Ϳ��Զ�Ƶ�ʽ��й��ơ�����������λ���ʵ��Ƶ�ʹ��ơ�ֵ��˵�����ǣ�������Ƶ�Ƶ��Ϊ�����źŵ�Ƶ�ʣ�����Ƶ�ʵ�Ƶ�ʻ���Ҫ���ϲο�Ƶ�ʡ���ǰ����2�εIJ������ΪT��������λ����ֵΪ ��
�� ����Ƶ�ʹ���ֵ���Ա�ʾΪ
����Ƶ�ʹ���ֵ���Ա�ʾΪ
 (9)
(9)
Ƶ�ʹ���ֵ��Ϊ2���֣�����Ƶ�ʲ���Ϊ�������ı�����Ƶ�ʣ�����ͨ����������Ͳ���Ƶ��ȷ����С��Ƶ�ʲ���Ϊ1��������Ƶ�����ڵ�Ƶ�ʹ���ֵ�����Կ���Ƶ�ʲ���������Ҫ��С��Ƶ�ʹ��ƾ��Ⱦ�����
����ʽ(8)�����Եõ�Ƶ�ʹ���ֵ�ķ���Ϊ
 (10)
(10)
2.4 Ƶ�ʲ�������
����������������Ͻ�����λ���ƺ�Ƶ�ʹ��Ƶķ����;��ȷ������������ȫ���ֻ�����Ƶ�ʲ��������IJ������ȡ�
����Ƶ�ʲ�������ΪƵ�ʲ���ֵ��ȥƵ����ʵֵȻ�����Ƶ����ʵֵ�ľ�������������������ֻ�����Ƶ�ʲ���������Ƶ�ʲ�������Ϊ
 (11)
(11)
��ʽ(11)���Կ�����ȫ���ֲ���Ƶ�ʲ��������IJ������������������RSN��������λ���Ƶĵ���N�Լ���������йء����������Խ�����Ƶ����Խ�ߡ����Ƶأ�������λ���Ƶĵ���NԽ�ࡢ�������Խ��Ƶ����Խ�ߡ��������ֵ���沿�ֽ�ͨ�����������֤��Щ���ضԲ�Ƶ���ȵ�Ӱ�졣
������������У�RSN��ADC������ADC���������ᵼ������Ƚ��ͣ�����Ӱ����λ���ƾ��ȡ�ADC�������������ͨ��������Ϊ��һ�ּ����������ο�����[11]�������źŴ����о���ʹ�õļĵ�Ч���㹫ʽΪ
 (12)
(12)
���У�bΪADC ����������λ��fsΪ�����ʣ�BΪ�źŴ�����
���еĸ�����ADCоƬ��8λ��12λ��14λ�Լ�16λ�ģ��ڱ��ĵķ��������У�ADC ����λ��ͳһȡ14 bits�����ӷ��������Ͳ���ʱ������������������µõ��������RSN ԼΪ86 dB��
2.5 С����ֵȥ��
��ʽ(11)��֪��Ƶ�ʲ������ȺͲ����źŵ��������أ����ܹ����Ʋ����ź��е���������ܹ���Ч��߲������ȡ�С��ȥ����ͨ��С���任�������������������Ҫ����Ϣ���Ӷ�ʵ�ֽ��롣С��ȥ�����ź�Ԥ��������Ӧ�ù㷺���ر���С����ֵȥ����ʵ����Ч�����á������˼��������¼��裺Я����Ϣ��ԭʼ�ź���Ƶ���С����������Լ��У�����Ϊ�����ܼ�������źŷֽ�ϵ������ֵ�ϴ������źŵ���������Է�ɢ�����ԣ���ϵ���ľ���ֵС��������ͨ���趨��ֵ�ķ������Թ��˵�����ֵС��һ����ֵ��С��ϵ�����Ӷ��ﵽ�����Ч����
С����ֵȥ��ľ���ʵ�ַ����ɲο�����[12-13]������С���任���õ�С������SymletsAС�����е�sym4С����
3 ��ֵ����
Ϊ����֤���������ȫ���ֲ���Ƶ�ʲ���������������ֵ������֤����������Ƶ�ʲ������ܽ��жԱȡ�����Ƶ��Ϊ10 MHz��Ƶ���źţ�����Ƶ��ȡΪ21 MHz��������λ���Ƶĵ�����������������ݷ����������á�ADC ����λ��Ϊ14 bits����Ӧ�������ԼΪ86 dB���������ȷ���������λ���Ƶĵ���N�Լ����������Ƶ�ʲ������ȵĹ�ϵ��Ȼ��������ֻ���Ƶ�����IJ������ȣ����������С����ֵȥ��Բ������ȵ��������á���Ҫע����ǣ�Ƶ�ʲ������Ⱦ���ָ�������Ƶ�ʹ��ƾ��ȣ����ڰ������ֲ��Ĵ������ڵ����������IJ������ȣ���Ҫ�ٳ��Բ������ӡ�
3.1 ���Ƶ����Բ������ȵ�Ӱ��
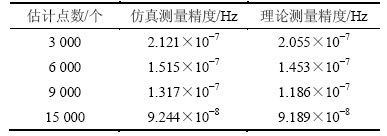
��ʽ(8)��(11)��֪��������λ���ƵĹ��Ƶ���Խ�࣬��λ���ƾ��Ⱦ�Խ�ߣ�Ƶ�ʲ������Ⱦ�Խ�ߡ�Ϊ�˷�����֤���Ƶ�����Ƶ�ʲ������ȵ�Ӱ�죬����ͬ����������������¶Թ��Ƶ����ֱ�Ϊ3 000��6 000��9 000��15 000�����µ�Ƶ�ʲ������Ƚ�����ֵ���棬���в������Ϊ1 s�����������1��ʾ��
�ɱ�1��֪��������λ���Ƶĵ���Խ�࣬Ƶ�ʲ���ֵ��Խ��ȷ���������۽��������ģ����Ƶ�����ͬʱ�����ۺͷ���Ƶ�ʲ�����������ֵ�����ֵ���Ǻϣ����Ƶ���Ϊ6 000��9 000��15 000ʱ��Ƶ�ʲ������ȷֱ��ǹ��Ƶ���Ϊ3 000ʱ�� ����
���� ���Լ�
���Լ� ����
����
��1 ���Ƶ�����ͬʱ�����ۺͷ���Ƶ�ʲ�������
Table 1 Theoretical and actual frequency measurement accuracy under different measurement numbers
3.2 ��������Բ������ȵ�Ӱ��
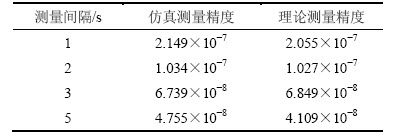
�������Ϊ1��2��3�Լ�5 sʱ��Ƶ�ʲ����������2��ʾ������������ǰ���������ƣ����й��Ƶ���Ϊ3 000���ӱ�2���Կ��������Ų�����������ӣ���λ���ƾ���Խ�ߣ�Ƶ�ʲ���ֵҲԽ��Խ��ȷ��ͬʱ������Ƶ�ʾ�����Ƶ�ʷ���������Ƚ��Ǻϣ��������Ϊ2��3��5 sʱ��Ƶ�ʲ������ȷֱ��Dz������Ϊ1 sʱ��2����3���Լ�5����
��2 ���������ͬʱ�����ۺͷ���Ƶ�ʲ�������
Table 2 Theoretical and actual frequency measurement accuracy under different time intervals Hz
3.3 ��������
ǰ��̽���˹��Ƶ����Ͳ�������Բ������ȵ�Ӱ�죬����������Ƶ����Ͳ��������������֤���������ȫ���ֲ���Ƶ�ʲ��������IJ������ȡ����������Ϊ1 s�����Ƶ���Ϊ3 000ʱ����������ͼ4��ͼ5�Լ���3��ʾ��
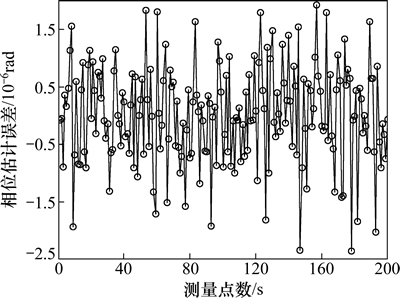
ͼ4 ��λ�������ֵ
Fig. 4 Phase estimation error values
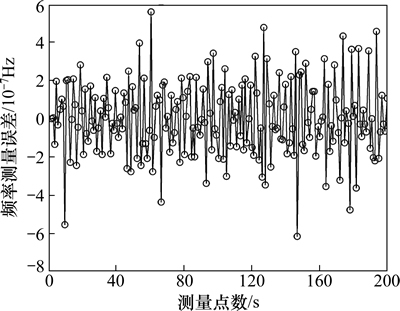
ͼ5 Ƶ�ʹ������ֵ
Fig. 5 Frequency estimation error values
��3 ���ۺͷ���Ƶ�ʲ�������
Table 3 Theoretical and actual frequency measurement accuracy

�ӱ�3���Կ�����λ��Ƶ�ʹ��ƾ��ȶ��������۾��������֤���˱���������ȷ�ԡ��������������ڸ��������£���������Ƶ�ʲ�������Ϊ 2.018��10-7 /s��������Ƶ��Ϊ10 MHz�����������Ϊ107�����Եõ�������������ֻ�Ƶ�ʲ���������������Ϊ2.018��10-14 /s��ͬʱ�������ƶϳ��������ӹ��Ƶ�������Ƶ�ʲ������ȿ��Դﵽ10-15/s�����㵱ǰ�߾��Ⱦ���Ƶ�ʲ���������
3.4 С����ֵȥ��Բ������ȵ�Ӱ��
С����ֵȥ�������Ч�ؽ��Ͱ�������Ӱ�죬���Ƶ�ʲ���ֵ�Ĺ��ƾ��ȡ�Ϊ����֤С����ֵȥ��Բ������ȵ�Ӱ�죬�Է���õ�����λ����ֵ����С��ȥ�룬�õ�ȥ������λ����ֵ��Ƶ�ʲ���ֵ��ͼ6��ͼ7��ʾ��
��ͼ6��ͼ7���Կ���������С����ֵȥ��������Բ��������Ӱ��õ��˳�����ƣ�ʹ�ò����������1�����������ϡ�ͬʱ������С����ֵȥ������λ����ֵ��Ƶ�ʹ���ֵ��ijЩֵ�ϳ����˽ϴ��������ڼ���˹����������С��ȥ��ʱ��ֵ��ѡȡ���¡�ͨ���Ľ���Ӧ����ֵѡȡ���Լ�����������������巽��������[14-15]��

ͼ6 С����ֵȥ������λ����ֵ
Fig. 6 Phase measurement values with wavelet threshold de-noising

ͼ7 С����ֵȥ����Ƶ�ʲ���ֵ
Fig. 7 Frequency measurement values with wavelet threshold de-noising
4 ����
1) �����һ��ȫ���ֲ���Ƶ�ʲ�������������ȫ�����źŴ��������˷���ģ�����Ƶ�ʲ����������¶�Ӱ����ȱ�㡣
2) �����Ƶ�ʲ��������IJ�����������������ȡ�������λ���Ƶĵ����Լ���������йء����������Խ�ߣ���Ƶ����Խ�ߡ�ͬ����������λ���Ƶĵ���Խ�ࡢ�������Խ��Ƶ����Խ�ߡ�
3) ���������Ϊ1 s�����Ƶ���Ϊ3 000ʱ��Ƶ�ʲ�������Ϊ2.0��10-14 /s������С����ֵȥ�봦����Ƶ�ʲ������ȴﵽ10-15 /s���������ǵ���ϵͳ�����õ�Ƶ�ʻ�(��ԭ����)����߾��ȴ�ԼΪ10-15 /s����������ֻ�Ƶ�ʲ������������������ǵ���ϵͳ�еľ���Ƶ�ʲ�������
�ο����ף�
[1] ���. ��ͨ�����ֻ�Ƶ�ʲ��������о���ʵ��[D]. ����: �й���ѧԺ������ʱ����, 2010: 1-18.
LIU Ya. Research on and achieve multi-channel digital frequency measurement method[D]. Xi��an: Chinese Academy of Sciences. National Time Service Center, 2010: 1-18.
[2] Walls L, Allan D W. Measurements of frequency stability[J]. Proc IEEE, 1986, 74(1): 162-168.
[3] ���, ��Т��, ������. һ�ֻ������ּ����Ķ�ͨ��Ƶ�ʲ���ϵͳ[J]. �����DZ�ѧ��, 2009, 30(9): 1963-1968.
LIU Ya, LI Xiaohui, WANG Yulan. Multi-channel frequency measurement system based on digital signal processing[J]. Chinese Journal of Scientific Instrument, 2009, 30(9): 1963-1968.
[4] ��Т��, ����, ���, ��. ʱ��Ƶ���źŵľ��ܲ���[M]. ����: ��ѧ������, 2010: 104-144.
LI Xiaohui, YANG Xuhai, LIU Ya, et al. Precision measurement of frequency and time[M]. Beijing: Publishing House of Science, 2010: 104-144.
[5] Sojdr L, Cermakj, Brida G. Comparison of high-precision frequency-stability measurement systems[C]//Proceedings of the 2003 IEEE International Frequency Control Symposium.Tampa, FL, 2003: 317-325.
[6] Mochizuki K, Uchino M, Morikawa T. Frequency-stability measurement system using high-speed ADCs and digital signal processing[J]. IEEE Transactions on Instrumentation and Measurement, 2007, 56(5): 1887-1893.
[7] Uchino M, Mochizuki K. Frequency stability measuring technique using digital signal processing[J]. Electronics and Communications in Japan, 2004, 87(1): 21-33.
[8] LIU Ya, LI Xiaohui, WANG Wenli, et al. Research and realization of portable high-precision frequency set[J]. Computer Measurement & Control, 2008, 16(1): 21-23.
[9] Kay S M. Fundamentals of statistical signal processing, Volume 1: estimation theory[M]. NJ: Englewood Cliffs, 1998: 3035.
[10] ZHU Xiangwei, SUN Guangfu, YONG Shaowei, et al. A high-precision time interval measurement method using phase-estimation algorithm[J]. IEEE Transactions on Instrumentation and Measurement, 2008, 57(11): 2670-2676.
[11] Oppenheim A V, Schafer R W. Discrete-time signal processing [M]. 2nd ed. New Jersey, USA: Prentice-Hall Inc, 1999: 234-250.
[12] ����ǿ, �д���, ������, ��. ����С��ϵ���任��С����ֵȥ���㷨�Ľ�[J]. ������, 2011, 30(10): 165-168.
WANG Hongqiang, SHANG Chunyang, GAO Ruipeng, et al. An improvement of wavelet shrinkage denoising via wavelet coefficient transformation[J]. Journal of Vibration and Shock, 2011, 30(10): 165-168.
[13] Jansen M, Bultheel A.Multiple wavelet threshold estimation by generalized cross validation for images with correlated noise[J]. IEEE Transactions on Image Processing, 1999, 87(7): 947-953.
[14] ����Ӣ, ���Ǿ�, ��. ��������С���Ľ���ֵ���״��ź�ȥ�뷽��[J]. �����������Ӧ��, 2012, 48(14): 143-147.
CAO Xiaoying, ZHANG Zhijun, XIANG Jianjun. Method of radar signal de-noising based on lifting wavelet improved threshold[J]. Computer Engineering and Application, 2012, 48(14): 143-147.
[15] Ѧΰ, �ظ���, ������, ��. ����һ���µ�С����ֵ�������״��ź�ȥ��[J]. ���������, 2008, 25(8): 319-322.
XUE Wei, GUAN Fuhong, CHEN Liangzhang, et al. Radar signal de-noising based on a new wavelet thresholding function[J]. Computer Simulation, 2008, 25(8): 319-322.
(�༭ �²ӻ�)
�ո����ڣ�2014-06-18�������ڣ�2014-08-27
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61403413)(Project (61403413) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����ά�����о�Ա���������ǵ���ϵͳ��ʱ��ͬ�������о���E-mail��zhuxiangwei@nudt.edu.cn
ժҪ�����Ŀǰ���ǵ���ϵͳ��ԭ��Ƶ�ʱ��ĸ߾���Ƶ�ʲ����������һ��ȫ���ֲ���Ƶ�ʲ����������Ա����Ƶ���ź�ֱ�ӽ������ֲ������Խ��ģ�����Ƶ�ʲ����������¶�Ӱ�������⡣���������Ȼ����ʵ����λ���ƣ�������λ������Ƶ�ʲ�����������С����ֵȥ�봦����һ�������λ���ƾ��ȡ��о�������������������Ϊ1 s�����Ƶ���Ϊ3 000ʱ��Ƶ�ʲ�������Ϊ2.0��10-14 /s������С����ֵȥ�봦����Ƶ�ʲ������ȴﵽ10-15 /s������
[1] ���. ��ͨ�����ֻ�Ƶ�ʲ��������о���ʵ��[D]. ����: �й���ѧԺ������ʱ����, 2010: 1-18.
[2] Walls L, Allan D W. Measurements of frequency stability[J]. Proc IEEE, 1986, 74(1): 162-168.
[3] ���, ��Т��, ������. һ�ֻ������ּ����Ķ�ͨ��Ƶ�ʲ���ϵͳ[J]. �����DZ�ѧ��, 2009, 30(9): 1963-1968.
[4] ��Т��, ����, ���, ��. ʱ��Ƶ���źŵľ��ܲ���[M]. ����: ��ѧ������, 2010: 104-144.
[12] ����ǿ, �д���, ������, ��. ����С��ϵ���任��С����ֵȥ���㷨�Ľ�[J]. ������, 2011, 30(10): 165-168.
[14] ����Ӣ, ���Ǿ�, ��. ��������С���Ľ���ֵ���״��ź�ȥ�뷽��[J]. �����������Ӧ��, 2012, 48(14): 143-147.
[15] Ѧΰ, �ظ���, ������, ��. ����һ���µ�С����ֵ�������״��ź�ȥ��[J]. ���������, 2008, 25(8): 319-322.
