
��Һλ���ŷ�ϵͳģ�ͱ�ʶ������Ʒ���
�ۿ���1������1�������1�����Ҵ�2
(1. ������������ѧ ��е��������ѧԺ�������� ������ 150080��
2. ����������������ҵ��������˾�������� ��������150066)
ժ Ҫ������xPC ��ʵ����漼����MATLABϵͳ��ʶ�����䣬�Խ�Ծ�źź�Һѹ��λ��Ϊ�������������ʶ�õ���Һλ���ŷ�ʵ��̨����ѧģ�͡���ģ��Ϊ���ƶ������һ����PID���ƺ�ģ��������ɵĸ��Ͽ�������������������������Ӻ��Ե����������ӣ�����������ģ����ģ�Ͳ������߲�ֵ���㣻����ģ���л�����֤2�ֿ��Ƶ�ƽ�ȹ��ɣ�ģ���л���ִ�������ͨ���趨��������������״��������ȷ������ʵ����������������Ͽ��Ʒ���������ģ�����Ƶ���̬�������PID���Ƶ���Ӧ�ٶȣ������˵�Һλ���ŷ�ϵͳ���ۺ����ܣ��Ա��ض������(��������)�仯�к�ǿ����Ӧ������
�ؼ��ʣ�
λ���ŷ�ϵͳ��ģ�ͱ�ʶ��ģ��PID��ģ���л���xPC��ʵ����漼����
��ͼ����ţ�TH137 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)02-0332-06
Model identification and control method of
electro-hydraulic position servo system
SHAO Jun-peng1, HAN Gui-hua1, DONG Yu-hong1, LIU Jian-chun2
(1. College of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China;
2. Harbin Hafei Automobile Industry Group Co., Ltd., Harbin 150066, China)
Abstract: Mathematic model of electro-hydraulic position servo test bench was obtained based on xPC hardware-in-the-loop simulation technique and system identification toolbox in MATLAB, using step signal as the input and hydraulic cylinder position as the output. A hybrid controller composed of a classical PID controller and a fuzzy controller was designed based on the mathematic model. The integrating factor and the modifying factor were applied in controller, and interpolation method was used in the modifying factor fuzzy number model. A fuzzy switching mode was employed to avoid the undesirable disturbances caused by the switchover between the two control methods, and execution area of the fuzzy switchover can be set by membership function. The hardware-in-the-loop simulation results show that the steady-state error is eliminated for fuzzy control and rapidity for PID control is enhanced, the comprehensive performance of electro-hydraulic position servo system is improved and adaptability for plant changing parameters(load mass)is enhanced by the hybrid controller.
Key words: position servo system; model identification; fuzzy PID; fuzzy switching mode; xPC hardware-in-the-loop simulation technique
��Һ�ŷ�ϵͳ��һ�����͵ķ�����ϵͳ�����ó�������㷨���Ѵﵽ�����Ҫ��ģ�����Ƽ�������Խ�����ڲ���Ҫ֪�����ӵ���ѧģ�ͣ�ֻ����ݾ������ʵ�ֿ���[1-2]������Һѹ�ŷ�ϵͳ�������ȷ�����أ���ģ�����Ʋ���������Ҫ���ڸ���ģ���������ܷ��棬��ȡ�Ĵ�ʩ�У������������ӣ������Ե����������ӣ������˰����Ĵ�С�Զ��������Կ������õ�Ȩ�أ���������ڶ��ߴ���ͬ�ȼ�Ȩ�̶ȣ�������Ӧ��ͬ���ض�������⡣�Ե�������ģ����������Ӧ�죬����С���Բ����仯�н�ǿ��³����[3-5]�����ڱ������ӣ�����������ӽ������ģ���������������ӵ�ѡȡ����ͬʱ��������Ժ���̬����Ҫ������⣬ͨ�������������ӱ�֤ϵͳ�Ŀ�����Ӧ��ͨ��ѡ���С�Ļ������ӱ�֤ϵͳ�ϸߵ���̬����[6]���ڸ��Ͽ��Ʒ��棬����ģ�����ƺ�˫ģģ�����Ƶ��ۺ���ģ�����ƺ��������Ƶ�����[7-8]������ϵͳ�ľ�̬���ԡ�����ֻ�ǴӸ����ֲ���ģ�����ƽ����˸Ľ������ܴﵽ���ŵ�Ч�����ڴˣ��������������PID�ͻ����Ե����������ӵ�ģ��������ɵĸ��Ͽ��������ڹ����㸽������(��̬)��PID��������ɣ����л��ֿ��������ģ��������ƫ�빤�����Զ������(��ƫ�̬������)��������ã������������㸽���������ϵͳ�ľ��ȡ�
��Һ�ŷ�ϵͳ�ķ����ԺͲ�ȷ����ʹϵͳ�Ķ�̬����ʮ�ָ��ӣ�Ҫ����ϵͳ�ľ�ȷ��ѧģ�ͱȽ��� ��[9]��������������xPC������MATLABϵͳ��ʶ�����䣬�ڰ�ʵ����滷���£��Ե�Һλ���ŷ�ϵͳ(�ܿ�ʵ��̨)������ϵͳģ�ͱ�ʶ���Ա�ʶ�õ���ģ��Ϊ���������ģ��PID���Ͽ����������������ַ��漰��ʵ����档
1 xPC��ʵ����滷��
xPCĿ����Mathworks��˾�ṩ�ͷ��е�һ������ʵʱ�����ռ���ϵ��ܵĿ���ԭ�ͻ�Ŀ�꣬���ڿ�������ʵʱ���ԺͿ���������Simulink ����Ƴ����Ŀ�����ֱ��ȥ�����ܿض���ʵ�ͨ����ʵ�������̹۲����Ч��[10]���ܿ��ٵؽ������ƶ���������ģ��, ������������ϵͳ���ж�����ߵ�ʵ������֤����ϵͳ�����Ŀ����ԡ�
��ϵͳ��xPCĿ�������������Ŀ����ļ���;����������ΪPC������������Simulink����ơ�����Ŀ��Ӧ�ó���Ŀ���Ϊ�л����ػ�������ִ�������ɵĿ��Ƴ������, ��ͨ����̫��LAN������ʵ�ֺ�������֮���ͨ�š�
ͼ1��ʾΪ����Һѹ��Һ�ŷ�ϵͳ��ԭ�����ɼ������Ϊ�ź�Դ�����ŷ�����������źţ����������(D/A)������D/Aת�����Ŵ���ŷ����Ե����źſ����ŷ����Ŀ��ڣ���������Һѹ��λ�ƣ���λ�÷���ʱ����λ�ƴ�����������λ���źŸ����ݲɼ�(A/D)������A/Dת������ʾ��������ʾ���ϵõ�Һѹ��ʵʱλ�ã��Ӷ�ʵ��λ�ñջ����ơ�

ͼ1 ����Һѹ��Һ�ŷ�ϵͳ��ɿ�ͼ
Fig.1 Diagram of valve control cylinder electro-hydraulic servo system
2 ����MATLAB��ģ�ͱ�ʶ
��λ�÷�������Ӳ��(��Һλ���ŷ�ʵ��̨)��ʶ�����ǵ�ϵͳ��ʱ������ԣ����ж���ʵ�飬����xPCĿ��, ��Ŀ��Ӧ�ó���ʵʱ���й����У�ͨ���ı�����Sine Wave�źŵ������Ƶ�ʣ�step�źŵĽ�Ծʱ�估��Ծֵ�����в����Ľ���ʽ�������Բ����ĸı佫������ӳ��Һѹ��λ������źţ���¼���������[11-13]����MATLAB�����°Ѳɼ����ĸ�������������ݵ��룬����Ԥ����, ���ݷֳ�2���֣�һ���������������ݽ���ģ�ͱ�ʶ����һ����������֤���ݡ�ʵ���зֱ����ARXģ�ͺ�״̬�ռ�ģ�ͣ�ϵͳ��ʶ�����У�һ����Ҫ�����ݾ��Ǹ��ݶ�ϵͳ���е���ʶ��ȷ��ģ�ͽṹ(���״ε�ģ�Ͳ���)����Һѹ�ŷ�ϵͳ֪ʶ��֪�����ڷ��ظ�Һ�ŷ�ϵͳ����ϵͳ����Ƶ�ʽϵ�ʱ��������Ϊ��3��ϵͳ����ϵͳ����Ƶ�ʽϸ�ʱ�����ŷ�������2�����ڣ�ϵͳ����һ��5��ϵͳ[14]�����ձ�ʶ�������и�ģ�͵����϶ȣ����ղ���״̬�ռ�(n4s3)ģ�͡�����ģ�ͺ�ʵ����������ƫ����Զ�ģ����������0.943 6��
![]()
![]() �� (1)
�� (1)
����ʶ�õ���ģ�ͺ�ʵ�����߶Աȣ���ͼ2��ʾ��
��ʶ������Ŀ����Ϊʵ�ʹ�����ơ��Ż�����������ͼ1��֪����ʶ�õ���ģ�����ɷ��ظ��ŷ�ϵͳ�ջ�ģ�ͣ�����������λ�ñջ�ģ�͵õ��������ݺ���Ϊ��
![]()
![]() �� (2)
�� (2)

1��ʵ�����ߣ�2����ʶģ������
ͼ2 ��ʶģ�͵���֤
Fig.2 Validation of identification model
3 ģ��PID���Ͽ����������
����ģ��������һ��ר�ҿ��ƣ����ƹ����ַ�ӳ���˵����ܻ����ģ������Ҳ���ڿ��ƾ��Ȳ��ߣ��ڹ����㸽�����ײ���������ȱ�㡣��ˣ���Simulink�������Ա�ʶ�õ��Ŀ���ģ��Ϊ�������ģ��PID���Ͽ�������
���IJ��õ�ģ��PID���Ͽ������Ŀ���ϵͳ�ṹ��ͼ3��ʾ��ͼ�У�ke��kcΪE��C���������ӣ�ku��kiΪ����������������ӡ�ͨ��PID���Կ�������������������ģ����ģ�����߲�ֵ��ģ�����Ʋ��н�ϣ���ƫ�빤�����Զ���������Ե����������ӵ�ģ������Ϊ�����ڸ�������ҪʵʩPID���ƣ�������ģ��������ɡ��л����Ա�֤2�ֿ��Ƶ�ƽ�ȹ��ɣ�ʵ�������ֿ����������ƻ����Ϳ������ܵ����Ը��ơ����ֿ������õ������ź�U1��U2������Ƶ�ģ���л���������fe��fc��ģ���л����ƹ���ƽ�ȵؽ����л����������Ͽ������Ŀ�������U�Ը����趨ֵR��
3.1 �����������ӵ�ģ�������������
�ڻ�����������ģ����ģ�����߲�ֵ�Ŀ���ϵͳ�У�ģ������ΪҺѹ��λ�Ƶ�ƫ��e����仯��c�����Ϊ��������![]() ��ģ�����ƹ����Խ�����ʽ��ʾ��
��ģ�����ƹ����Խ�����ʽ��ʾ��
��ƫ�����Ա���E��ƫ��仯�����Ա���C����������ֵΪ��
{�����У���С���㣬��С�����У�����}={NB��NM��NS��0��PS��PM��PB}={-6��-5��-4��-3��-2��-1��0��1��2��3��4��5��6}��
��E��C�ֱ���ģ��ȡ�����㣺
![]()
ͼ4��ʾΪ�������E��C����������(��������������trimf)�����У�y=trimf(x)��
�����Ե�����������![]() ����������ֵΪ��
����������ֵΪ��
{�dz���һ�㣬С���dz�С}=
{VB��B��M��S��VS}=
{1��0.75��0.5��0.25��0}��
������������ϵ�ģ���Ӽ�����������ȡΪ��
![]()

ͼ3 ģ��PID���Ͽ���ϵͳ
Fig.3 Fuzzy PID hybrid control system

ͼ4 ģ�������������������������
Fig.4 Triangle-shape grade of membership functions of fuzzy input variables
�����������ƹ���
![]() �� (5)
�� (5)
������������![]() ��ȡֵ��ֱ�ӷ�ӳ��ƫ��E��ƫ��仯C�ļ�Ȩ�̶ȣ�������ʵ��ӳ�����߽����ֶ�����ʱ��˼ά�ص㣬�����Ե������ƹ������Ҫ����ת��Ϊ�����Ե�����������
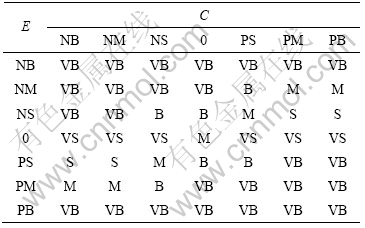
��ȡֵ��ֱ�ӷ�ӳ��ƫ��E��ƫ��仯C�ļ�Ȩ�̶ȣ�������ʵ��ӳ�����߽����ֶ�����ʱ��˼ά�ص㣬�����Ե������ƹ������Ҫ����ת��Ϊ�����Ե�����������![]() ������ר�Ҿ���õ���1�������Ե����������ӵ�ģ����ģ�͡���
������ר�Ҿ���õ���1�������Ե����������ӵ�ģ����ģ�͡���![]() ��ģ���о��������ķ���Ϊ�˱���ģ�������������̬������̬���������������
��ģ���о��������ķ���Ϊ�˱���ģ�������������̬������̬���������������![]() ģ����ģ�ͽ������߲�ֵ���㡣
ģ����ģ�ͽ������߲�ֵ���㡣
����̩�ն�Ԫ������һ��չ��ʽ����

��1 �����Ե����������ӵ�ģ����ģ��
Table 1 Fuzzy number model of online self-tuning factor
ͼ3�е�ke��kc��ku��ki����ITAE����ָ����в���Ѱ�ţ�
3.2 ģ���л��������
����ģ���л��ķ�ʽ����֤ģ�����ƺ�����PID���Ƶ�ƽ�ȹ��ɣ������˳����л���������IJ�ϣ�����Ŷ�[15]��ʵ�����Գ���PID���ƺ�ģ�����Ƶ��л���ģ����������Ϊ��
IF E(k) is fe and C(k) is fc THEN ��output�� is U1 Else ��output�� is U2��
���У�U1Ϊ����PID�Ŀ��������U2Ϊģ�����Ƶ������fe��fc�ֱ�Ϊģ������E��C��ģ���л������Ⱥ���(��˹����gaussmf)��ģ���л���ִ�������ͨ���趨������������״����L����ȷ��(��ͼ5�����У�y=gaussmf(x))��

ͼ5 ģ���л���˹�����Ⱥ���
Fig.5 Gaussian membership functions of fuzzy switching
3.3 ģ��PID���Ͽ����������
����Kʱ�̵�����������E��C�����ʱ��ģ��PID���Ͽ������Ŀ������Ϊ��

4 �������Ƚ�
4.1 ���������
Ϊ��֤ģ��PID���Ͽ���������Ч�ԣ���ʽ(2)����ʾ�ĵ�Һ�ŷ�λ��ϵͳ���м�������档����ϵͳ�����������Ӱ���ϵͳ���������ı仯������������˴����ķ�����㡣�������Simulink�ṩ��ode45�㷨������Ƶ��Ϊ1 kHz��
�ֱ������PID����������ͳ��ģ����������ģ��PID���Ͽ��������з��棬��λ��Ծ��Ӧ�����ͼ6��ʾ������������������PID���ƣ�����ʱ��Ϊ1.3 s(������Χ5%ʱ)������ģ�����ƣ�����ʱ��Ϊ0.27 s������ʱ��Ϊ1.1 s(������ΧΪ5%)�����������أ���̬���ܲ��ã���ֵ̬Ϊ0.97����ʾ����̬������Ҫ��ģ����������������Լ�ģ������ȱ�ٻ��ֿ������õ����£���ˣ���̬���ܽϼѣ�����̬���ܽϲ

1��PID�������ߣ�2��ģ���������ߣ�3��ģ��PID�������ߣ�4����������
ͼ6 ��λ��Ծ��Ӧ�Ա�
Fig.6 Comparison of unit step responses
����ģ��PID���Ͽ��ƣ�����ʱ��Ϊ0.45 s������ʱ��Ϊ0.75 s(������Χ5%ʱ)����PID�����и���Ķ�̬��Ӧ���ԣ��ȳ���ģ�����ƾ��и�С�ij��������ߵ���̬���ȡ�
����ƺͷ���ʵ���У���ke��kc��ku��ki���ڸ��������������ϵ������ϸѡ����С������ֵһ��һ���Ĵﵽ�ȶ��������ѡȡke=5��kc=0.05��ku=2��ki=0.002��
4.2 xPC��ʵ�����
Ϊ��֤ģ��PID���Ͽ�����ʵ��Ӧ���е���Ч�ԣ���ͼ1��ʾ��Һ�ŷ�ʵ��̨�Ͻ��а�ʵ����� �о���ͼ7��ʾΪ��ʵ��̨ϵͳ�����ֿ��Ʒ��������µĵ�λ��Ծ��Ӧ����Ծ����ֵΪ1 mm����ʵ�����������������PID���ƣ�����ʱ��Ϊ1.67 s������ʱ��Ϊ1.8 s(������ΧΪ2%)������ģ�����ƣ�����ʱ��Ϊ0.715 s������ʱ��Ϊ1.2 s(������ΧΪ2%)������ģ��PID���Ͽ��ƣ�����ʱ��Ϊ0.24 s������ʱ��Ϊ0.4 s(������ΧΪ2%)�������Ϊ2.23%��

1��PID�������ߣ�2��ģ���������ߣ�3��ģ��PID�������ߣ�4����������
ͼ7 ��ʵ����浥λ��Ծ��Ӧ����
Fig.7 Unit step responses curves of hardware-in-the-loop simulation
��PID���Ʋ��ԶԱȣ�ģ��PID���Ͽ�����ʵ��̨����У��ʱ�䷽�������ơ����ܳ���ģ��������ϵͳ������ʱ��Ҳ�϶̣�������̬���������Ŷ������Ͽ��Ƹ��õ������ϵͳ�Ŀ���������������˴�ͳģ��������������ϵͳ����̬λ�õ��������
Ϊ��һ�����۸��Ͽ������Ŀ������ܣ���ʵ��̨�ĸ����������Ըı䣬��Ծ����ֵΪ0.5 mm����ʵ������Ծ��Ӧ������ͼ8��ʾ���ɼ������Ͽ��ƿ������Ա��ض�������仯�к�ǿ����Ӧ������

m/kg: 1��67.84; 2��96.40; 3��124.96; 4����������
ͼ8 ��ʵ������Ծ��Ӧ����(���������仯)
Fig.8 Step responses curves of hardware-in-the-loop simulation (changing load mass)
4.3 �������Ƚ�
��ͼ6��ͼ7���Կ���������̨�İ�ʵ���������������������Щ��ͬ������ģ��PID���Ͽ�������ʵ��̨����Ӧ���ߵĶ�̬���ܺ���̬���ܾ����ڷ����������ڳ���ģ����������PID��������ʵ��̨����Ӧ���߿��������½�����̬���ܸ��ơ���Ҫԭ����ʵ��̨���ƻ�·�м����˱����˲�ģ�飬�����˲��������ã��Լ���ʶ��ģ����Ȼ��ʾΪһ�����Ժ���������ʵ��ϵͳ�����Ի����ȡ�Ȼ����ʵ�������������������ַ�����һ�¡�
�ɼ������ñ�ʶ��ģ�ͽ��п���������ƣ����ַ�������Ч�ġ�����ģ��PID���Ͽ��Ʒ�����ϵͳ���ֽϺõĶ�̬���Ժ���̬���ȣ��������õ�³���ԡ�
5 �� ��
a. ��ʶ�õ���Һλ���ŷ�ϵͳ��ѧģ�ͣ��Ա�ʶ��ģ��Ϊ��������˸��Ͽ����������õĿ���Ч����֤��ʶģ�͵���Ч�ԡ�
b. ����˵�Һλ�ÿ����ŷ�ϵͳ��ģ��PID���Ͽ�������ʵ����PID��������ģ�������������ƻ�������ʵ�������֤������Һѹ��λ��ƫ��ϴ�ʱ���ÿ������ɿ�����ƽ�ȵ����Ƹ��ţ���֤��ϵͳ��̬��Ӧ�Ŀ����ԣ���λ��ƫ���Сʱ������PID����������Ҫ���ã��ɱ�֤���õ���̬���ܡ����Ͽ��ƿ������Ա��ض������(��������)�仯�к�ǿ����Ӧ������
�ο����ף�
[1] �� ��, �� ��, �� ��, ��. ���ڶ�Ŀ���Ż���ģ����ģ��ṹ���Ƽ�Ӧ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(6): 1145-1152.
YANG Yong, WEN Dan, LUO An, et al. Fuzzy sliding mode variable structure control based on multi-objective optimization and its application[J]. Journal of Central South University: Science and Technology, 2006, 37(6): 1145-1152.
[2] �����, ����ѫ, �� ��. ����MATLAB ��Һѹ���ŷ���е��ģ�����Ʒ����о�[J]. ������Һѹ, 2004(8): 85-87.
DONG Yu-hong, ZHANG Li-xun, XU Ming. The fuzzy control simulation of the hydraulic force servo manipulator based on MATLAB[J]. Machine Tool & Hydraulics, 2004(8): 85-87.
[3] �� ��, ����ƽ, ����Ӣ. ���������˵�������ר��ģ������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(6): 1059-1062.
CHEN Feng, WANG Sui-ping, HAN Xiao-ying. Self-adjustable expert fuzzy control of deep mining robot[J]. Journal of Central South University: Science and Technology, 2005, 36(6): 1059-1062.
[4] Cupec R. Self-tuning controller based on process fuzzy model[C]//Kis N E. Computational Intelligence and Applications. Mastora: World Scientific and Engineering Society Press, 1999: 187-192.
[5] �� ��, ����ƽ. ����������Ӧģ��PID �������о������[J]. �վ����̴�ѧѧ��: ��Ȼ��ѧ��, 2005, 6(5): 11-13.
ZHU Yan, GUO Jun-ping. The study and simulation of fuzzy PID based on mutative field[J]. Journal of Air Force Engineering University: Natural Science Edition, 2005, 6(5): 11-13.
[6] ��ʿ��. ģ������: ���ƺ����ܿ�����[M]. ������: ��������ҵ��ѧ������, 2004.
LI Shi-yong. Fuzzy control: Neural networks and Intelligent control[M]. Harbin: Harbin Institute of Industry Press, 2004.
[7] HAN Gui-hua, CHEN Li-hua, SHAO Jun-peng. Study of fuzzy PID controller for industrial steam turbine governing system[C]// ISCIT 2005��International Symposium on Communications and Information Technologies 2005, Proceedings. Beijing, 2005: 1228-1232.
[8] Butkiewicz B S. System with hybrid fuzzy-conventional PID controller[C]//Proceedings of the IEEE International Conference on Systems, Man and Cybernetics. Nashville, 2000: 3705-3709.
[9] ��ռ��. ��������Һѹ�ŷ�����[M]. ����: �������պ����ѧ������, 2005.
WANG Zhang-lin. Modern electricity hydraulic servocontrol[M]. Beijing: Beijing University of Aeronautics & Astronautics Press, 2005.
[10] Ѧ����, ����Ȫ. ����MATLAB/Simulink��ϵͳ���漼����Ӧ��[M]. ����: �廪��ѧ������, 2002: 404-416.
XUE Ding-yu, CHEN Yang-quan. System simulink and application based on MATLAB/Simulink[M]. Beijing: Tsinghua University Press, 2002: 404-416.
[11] ��־��, �� ��, ���ַ�. ����xPC��Һѹ�ŷ�ʵʱ����ϵͳ[J]. ������Һѹ, 2006(2): 171-173.
WU Zhi-gang, LIU Li, ZHANG Le-fei. Hydraulic servomotor real-time control system based on xPC[J]. Machine Tool & Hydraulics, 2006(2): 171-173.
[12] �콨��, �Գ���, �����. Һѹ�ھ����������������߱�ʶ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(3): 537-541.
ZHU Jian-xin, ZHAO Chong-you, ZOU Xiang-fu. Identification of soil parameters on vibratory excavation of hydraulic excavator[J]. Journal of Central South University: Science and Technology, 2006, 37(3): 537-541.
[13] ����ѫ, �����, ������. ���ڰ��������漼���Ļ����ŷ�ϵͳģ�ͱ�ʶ�о�[J]. ����һ�廯, 2006, 12(2): 30-32.
ZHANG Li-xun, DONG Yu-hong, WANG Huai-jun. Research on model identification of mechatronic servo system based on hardware-in-the-loop simulation technology[J]. Mechatronics, 2006, 12(2): 30-32.
[14] �����. Һѹ����ϵͳ[M]. ����: ������ҵ������, 1981.
LI Hong-ren. Hydraulic control system[M]. Beijing: National Defense Industry Press, 1981.
[15] SHAO Jun-peng, CHEN Li-hua. The application of fuzzy control strategy in electric hydraulic servo system[C]//IEEE International Conference on Mechatronics and Automation. Harbin, 2005: 2010-2016.
�ո����ڣ�2007-05-22�������ڣ�2007-07-06
������Ŀ�����������ͼƻ�������Ŀ(z2005-1-23002)
ͨ�����ߣ�����(1972-)��Ů��ɽ�������ˣ���ʿ�о���������Һѹ���ƣ����ܿ��ƣ����ؼ����о����绰��0451-86978436��E-mail: hanguihua99@yahoo.com.cn
