
�ںϷ������й������ӵ��������˲�
����1, 2��������2
(1. ��̶��ѧ ��Ϣ����ѧԺ������ ��̶��411105��
2. ��������ҵ��ѧ ����ѧԺ�������� ��������150001)
ժ Ҫ��
���У�����ģ�͵IJ�ȷ���Զ������˲���³���Բ�����˲���ɢ�����⣬���������й������������������˲����еõ��µ��˲��㷨�����㷨�ܹ����ݷ������к���ֵ�Զ��ı�״̬����Э�������ģ�Ͳ�ȷ�����µ����Ӳ����ݽ���������˲�����³���ԡ������㷨������DZͧ��λ�Ǻ�Ƶ�ʸ������⣬�������������˲��㷨���������˲��㷨���бȽϣ�����������㷨����������������2���㷨��
�ؼ��ʣ�
��ͼ����ţ�TN911.23 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0448-05
Unscented particle filter with risk sensitive function
LI Peng1, 2, SONG Shen-min2
(1. College of Information Engineering, Xiangtan University, Xiangtan 411105, China;
2. School of Astronautic, Harbin Institute of Technology, Harbin 150001, China)
Abstract: In order to overcome the poor robustness and divergence which cause by uncertain estimation model, risk sensitive estimator was inforduced into the unscented particle filter, the proposed algorithm could automatically change the state noise covariance according to the magnitude of the risk function. As a result, sample impoverishment could be mitigated, and the robustness of filter would be improved. A simulation example of submarine bearing and frequency tracking was presented, the performance of the proposed algorithm was compared with the unscented Kalman filter and the unscented particle filter. Simulation results show that the new algorithm performs better than the two others.
Key words: unscented particle filter; risk sensitive estimator
�����˲��Ը������������Ͼ���ͻ�����ƣ������ά�ķ����ԡ��Ǹ�˹��̬ϵͳ��״̬���ƹ��ƻ�����������⣬���㷺Ӧ�����Ӿ����١������˶�λ�����յ��������ϼ���������������˲��Ļ�������Ҫ�Բ����㷨�������Ҫ�Բ����㷨�������ز����㷨���ز�����������������,���ŵ������������ӣ�ȨֵԽ��������Ӵ�Խ�࣬�෴���Ӵ�Խ���������Ӵ��������ز���������Ӽ������Լ������Ӷ��������������Ʊ��������ܶȣ����������ݽ����⡣��������ݽ�����Ƚϳ��õ����ز���-�ƶ��㷨����ƽ�������ȷ���[1-2]���ز���-�ƶ��㷨�����ڹ�����Ҫ�Բ���֮�����һ��MCMC(Markov chain monte carlo)�ƶ�������ʹ���Ӽ�����ƽ�ȷֲ����������Ӽ������ԡ��뿨�����˲�������С����������״̬�����Ź��Ʋ�ͬ���������й�������߶��صķ�ʽ�ͷ��������ĸ߽����ģ�Ͳ�ȷ����ǿ�����߹������ĸ߽ر仯����ʱ���������ۺ�����Ƶķ��������˲�����³����ҪԶԶ��������С���������ʽ���˲���[3-5]���������й���ʵ������ͨ����ʽ���Զ���״̬����Э����������˲����ܣ���Ҳ�������˲�����������ݽ������ͨ�����������÷������й����ܹ��������Ӳ����ݽ������������˲��о������ڹ��ϵĹ۵�[6]������������Ը��ʹ��ƹ����У�����ģ�͵IJ�ȷ���Զ������˲���³���Բ�����˲���ɢ�����⣬���������й��������������˲����еõ��µ��˲��㷨�����㷨�ܹ����ݷ������к���ֵ�Ĵ�С�Զ��ı�״̬����Э��������������ģ�Ͳ�ȷ�����µ����Ӳ����ݽ�����
1 ���������˲�
��ʵ�ʹ��̺ͼٶ�������ģ����ƫ��ʱ�������źŴ������ƿ��Ծ���ס���飬��Ҳ���о�³���˲���������Ķ��������������˲���³�����Ƶ�ʵ��;��֮һ���ڴˣ������������÷������й�����ʵ��³���˲�������״̬ģ�Ͳ�ȷ���Ե�³���Թ���[4]��
1.1 ���������
���ȸ����˷������й��Ƶ�һ���Զ��塣�ٶ����Ǵ���һ���̶��ĸ���ģ�Ϳ�����ȫ����ʵ��ϵͳ������P0������ʵ��ģ���ʷֲ�����Ϊ���õ�ģ�Ϳ��ܲ�����ʵ��ģ�ͣ����ͨ��Pd�������ģ�͡��ٶ�![]() ��״̬x��ʵֵ�ĺ�����ͨ��(
��״̬x��ʵֵ�ĺ�����ͨ��(![]() �ռ�ɲ⺯��[5]�����������й��ơ�
�ռ�ɲ⺯��[5]�����������й��ơ�
����![]() Ϊ�ϸ��н�����������
Ϊ�ϸ��н�����������![]() ����������R�ռ�ɲ⺯��
����������R�ռ�ɲ⺯��![]() ������
������
![]() (1)
(1)
���Ҷ�����С�������й���
![]() (2)
(2)
���ݡ������ƵĿ�����������С��������������ô�ÿ������ض�����һ���̶ȵ�³���ԡ�����һ���ۿ�֪���ù������Ӿ���³���ԡ�
����������й��Ƶ���С�����ۺ���������ѡ��
![]() (3)
(3)
���У�![]() Ϊ�������ճ̶ȵIJ�����
Ϊ�������ճ̶ȵIJ�����
��С�������й��ƴ��ۺ���[5]����Ϊ��
![]() (4)
(4)
��ʽ(2)�������С�������й������Ͻ�������[6]��
![]() (5)
(5)
���У�R(Pd|P0)��ʾ���ʷֱ�ΪP0 ��Pd��2��ģ�͵�����ء�������ȷ���˷������й��Ƶ�ȷ���壬������Ĺ�ʽ��֪���������й��Ƶ��������Ͻ磬���Ͻ���2������ɣ���1���ֺ�ģ��ȷ��֪ʱ�Ĵ��ۺ���һ�£���2����Ϊ��ʵ����ģ�ͺ���Ƹ���ģ��֮���ƫ�
1.2 ���������˲���
������ɢʱ�������ϵͳģ�����£�
![]() (6)
(6)
���У�![]() Ϊkʱ�̵��ź�״̬��
Ϊkʱ�̵��ź�״̬��![]() Ϊkʱ�̵Ĺ۲�����
Ϊkʱ�̵Ĺ۲�����![]() ��
�� ![]() Ϊ����ͬ�ֲ��ĸ��ʹ��̣������ܶȷֱ�Ϊ
Ϊ����ͬ�ֲ��ĸ��ʹ��̣������ܶȷֱ�Ϊ![]() ��
��![]() [1]��
[1]��
�����1�ͦ�2Ϊ�ϸ���������������2�����ղ���![]() ��
��![]() ���������д��ۺ���(
���������д��ۺ���(![]() )Ϊ��
)��
![]()
![]() (7)
(7)
��С�������й��ƶ���Ϊ��
![]() (8)
(8)
��֤������������������[6-9]��
![]()
![]() (9)
(9)
���У�![]() Ϊkʱ�̸��ʷֱ�ΪP0��Pd��2��ģ�͵�����ء�
Ϊkʱ�̸��ʷֱ�ΪP0��Pd��2��ģ�͵�����ء�
�˲����Ƶ�Ŀ���Ǽ���״̬�����Ĺ���ֵ![]() ����������xk������ʽ(7)�еı�����k���ɵã�
����������xk������ʽ(7)�еı�����k���ɵã�
![]() (10)
(10)
Ϊ�˼������ʽ�еı���������ȡֵ�����1=��2���Ҧ�1�ͦ�2ȡ��ͬ�ĺ�������
![]()
��ʽ(7)���ƣ�ʽ(8)��Ϊ��
![]() (11)
(11)
ע�⣺����kʱ����ǰ״̬�����Ź���ֵ![]() ���Ѿ�ȷ�������ҹ̶����䡣
���Ѿ�ȷ�������ҹ̶����䡣
ʽ(10)��״̬����ֵ�ĵݹ�������ͨ���ǹ淶�����ܶȺ���![]() ��ʵ��[9]��
��ʵ��[9]��
![]()
![]() (12)
(12)
�ܶȺ���![]() ʵ��Ҳ����ʽ(10)�м�����ѧ����ֵ����Ϣ״̬����
ʵ��Ҳ����ʽ(10)�м�����ѧ����ֵ����Ϣ״̬����![]() ��
��
![]()
![]() (13)
(13)
��Ϊpv(yk) �� ![]() ������С�������й���
������С�������й��� ![]() �Ƕ����Ĺ��̣����Կɵ�
�Ƕ����Ĺ��̣����Կɵ�
![]() (14)
(14)
2 ���������������˲���
ʽ(15)�ĵݹ�������ͨ�������˲���ʵ�֡���ÿһʱ��k�� ��Ϣ״̬![]() ����ͨ��N����������
����ͨ��N����������![]() �����Ƽ��㡣
�����Ƽ��㡣
![]() (15)
(15)
���У���ΪDirac delta ����������![]() Ϊ��Ҫ��Ȩֵ����ʽ(15)����(14)���ɵã�
Ϊ��Ҫ��Ȩֵ����ʽ(15)����(14)���ɵã�
![]() (16)
(16)
����ʽ(16)�������������˲���kʱ��״̬�����Ź���ֵ![]() ���͵õ����ںϷ����������ӵ��������˲�����
���͵õ����ںϷ����������ӵ��������˲�����
���������������˲��㷨����[1, 5, 9]��
(1) ��ʼ����t=0
��Ԥ�ȼٶ����ܶ�p(x0)��ȡN������![]() (i=1������N)����ȡ��Ȩֵ��Ϊ
(i=1������N)����ȡ��Ȩֵ��Ϊ![]() ������ʽ(17)�����ʼ״̬�����Ź���ֵ
������ʽ(17)�����ʼ״̬�����Ź���ֵ![]() ��������
��������
![]() (17)
(17)
![]() (18)
(18)
(2) ����ʱ��t=1��2����������Ҫ�Բ���Ȩֵ
����i=1������N��ͨ��ƽ�����������˲�������ʱ����¡�
1) ����singma ��
![]() (19)
(19)
2) ���ӵ�ʱ�����
![]() (20)
(20)
![]() (21)
(21)
![]() (22)
(22)
![]() (23)
(23)
3) �������
![]() (24)
(24)
![]() (25)
(25)
![]() (26)
(26)
![]() (27)
(27)
![]() (28)
(28)
![]() (29)
(29)
![]() (30)
(30)
4) ������ĸ��ʷֲ��в���N����������
![]()
����i=1������N, ����ÿһ�����ӵ���Ҫ��Ȩֵ�������й�һ����
![]() (31)
(31)
�Բ���Ȩֵ���й�һ��������״̬�����Ź���ֵ��
3 ��ѧ����
ͨ��DZͧ��λ�Ǻ�Ƶ�ʸ���������������֤�㷨����Ч�ԡ�״̬��������Ϊ��ά���λ����������ά����ٶ�������Ŀ�귢�����Ƶ������Ƶʮ���ȶ����۲ⷽ�̰�����λ�ǺͶ�����Ƶ��2��������c=1 500 m/s ��ʾ������ˮ�еĴ����ٶ�[10]���ڸ��ٵ��м�ʱ�̣�Ϊ�����Ŀ��ɹ۲���DZͧ���л�����
![]()
![]()
![]()
״̬��������vΪ���ֵ��˹����������̬ϵͳЭ����Ϊ(10-3)2����Ƶ����Э����Ϊ(10-4)2���۲�����ҲΪ���ֵ��˹����������λ��Э����Ϊ(0.017 5)2��Ƶ��Э����Ϊ(0.06)2��
�ڷ���ʵ������У��Է��������������˲���(RSUPF)�����������˲���(UKF)���������˲���(UPF)���������ܱȽϡ���������ͼ1~3��ʾ����ͼ1~3���Կ��������������˲����������ھ�����ƺͷ�λ�ǹ��ƹ����г������Է�ɢ����Ƶ�ʹ��ƹ����в�ȷ����Ҳ�����ԡ������������˲�����ȣ��������˲������ܸ��ã�����ʱ��ȷ����Ҳ�����ԣ����¹��ƽ����Ч�����ܷ������������˲�����������ǿ������2���㷨�����ڸĽ����Ʒ�ɢ������Ҫ�����������������㷨����ͼ3Ҳ���Կ��������㷨��Ƶ�ʹ��ƹ����б��ֲ������룬����Ҫ�������ڸ���;�У�DZͧΪ�˸���Ŀ��Ŀɹ۲��Զ����л��������¡������߽Ƿ������ٱ仯�Ĺ����У��۲����Ϣ�����ࡢ���㷺��ͬʱҲ���ؼӾ���״̬���̵ķ����ԡ�����������У��˲����ڽ���״̬���ݴ���ʱ�����ֹ��ƴ���Ŀ����Դ����ߣ���˵����˲���ɢ��
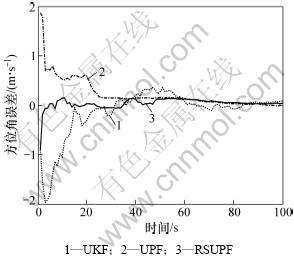
ͼ1 ��λ�����
Fig.1 Azimuth angle error
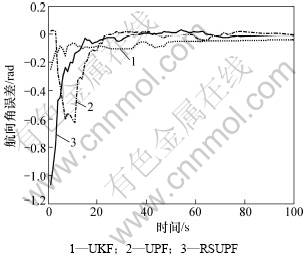
ͼ2 ��������
Fig.2 Heading angle error
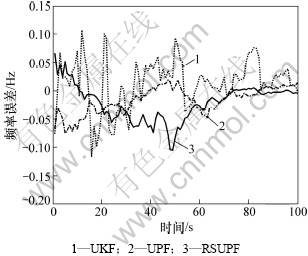
ͼ3 Ƶ�����
Fig.3 Frequency error
4 ����
���������к����ںϵ��������˲����С����ڷ����Է�λ�Ǻ�Ƶ�ʸ��������е�Ӧ���˸��㷨���������������µ��˲������������ϱ����������˲������������˲�����Ҫ��Խ�����������������˲���������ص�����ͨ���������к����������������ĸ߽���ͷ����ӣ��������㷨��ģ�ͺ������IJ�ȷ���Ծ������С������Ƶķ������к������ʣ��µ��˲������ͻ�Բ�����ȷ��ģ�͵����Ӳ����ݽ��������³���ԡ�����Ҫ������һ���ּ�������Ϊ���ۣ�Ȼ�����㷨�ṹ������ʵ�֡�
�ο����ף�
[1] Kotecha J H, Djuric P M. Gaussian Particle Filtering[J]. IEEE Trans Signal Processing, 2003, 51(10): 2592-2601.
[2] Crisan D, Doucet A. A survey of convergence results on particle filtering methods for practitioner[J]. IEEE Trans Signal Processing, 2002, 50(3): 736-746.
[3] Thrun S, Langford J, Verma V. Risk sensitive particle filters, in Advances in Neural Information Processing Systems 14[M]. Cambridge: MIT Press, 2002: 372-381.
[4] James M R, Elliott R J. Risk-sensitive and risk neutral control for continuous-time hidden markov models[J]. Journal of Applied Mathematics and Optimization, 1996, 34(1): 37-50.
[5] Whittle P. Risk sensitive optimal control[M]. New York: Wiley, 1990: 89-103.
[6] Dey S, Moore J B. Risk sensitive filtering and smoothing via reference probability methods[J]. IEEE Transactions on Automatic Control, 1997��42(11): 1587-1591.
[7] Bhaumik S, Ghoshal T, Sadhu S. Alternative formulation of risk-sensitive particle filter (posterior)[C]//Proceedings of 2006 Annual IEEE India Conference. Piscataway: IEEE, 2006: 1-4.
[8] Speyer J L, Fan C, Banavar R. Optimal stochastic estimation with exponential cost criteria[C]//Proc 31st Conf Decision Control, New York: IEEE, 1992: 2293-2298.
[9] Moore J B, Elliott R J, Dey S. Risk-sensitive generalizations of minimum variance estimation and control[J]. J Math Syst Estimat Control, 1997, 7(1): 1�C15.
[10] Gustafsson F, Gunnarsson F, Bergman N, et al. Particle filters for positioning, navigation, and tracking[J]. IEEE Trans Signal Processing, 2002, 50(2): 425-437.
(�༭ �Կ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ�����ص�������Ŀ(60535010)
ͨ�����ߣ�����(1978-)���У�ɽ���ൺ�ˣ���ʿ����ʦ�����·������˲��о����绰��15200378567��E-mail��pengli.hit@gmail.com
ժҪ����Ը��ʹ��ƹ����У�����ģ�͵IJ�ȷ���Զ������˲���³���Բ�����˲���ɢ�����⣬���������й������������������˲����еõ��µ��˲��㷨�����㷨�ܹ����ݷ������к���ֵ�Զ��ı�״̬����Э�������ģ�Ͳ�ȷ�����µ����Ӳ����ݽ���������˲�����³���ԡ������㷨������DZͧ��λ�Ǻ�Ƶ�ʸ������⣬�������������˲��㷨���������˲��㷨���бȽϣ�����������㷨����������������2���㷨��
