

DOI�� 10.11817/j.issn.1672-7207.2020.03.021
����BP������IJɿ�������̽����������
����Զ1,��˧1,������1,������2
��1. ������ѧ �������ɽ��ȫ���ɽ������ص�ʵ����, ���� ������110819��
2. ���ɽ�������ɫ��ҵ�������ι�˾, ���ɹ� ��壬025450��
ժ Ҫ��
����ɽ����-��ʪ-����ӻ����Բɿ�����ά����̽�⾫�ȵ�Ӱ�죬�з��ɿ������ӻ���ģ��װ�ã����64���������鷽���������¶ȡ����ʪ�Ⱥͷ۳�����Ũ�ȶ�̽������Ӱ�첢����������Ϊ��һ������̽��������BP������Ԥ��ģ�ͣ���Ӧ����ijǦп��ɿ�����̽���С��о���������������ʪ�����ߣ�����ƽ�����ȳʡ�S�������������������ʪ�Ƚ���75.0%~85.0%ʱ�������������Լӿ죻��۳�����Ũ��������ƽ��������40 mg/m3��100 mg/m3Ϊ�ڵ������ʽ�������������۳�����Ũ�Ƚ���40~100 mg/m3ʱ������������죬���۳�����Ũ�ȴ���100 mg/m3ʱ���������ʴ�֮�����۳�����Ũ��С��40 mg/m3ʱ������������ͣ��¶ȶԵ���ƽ������Ӱ���С��ģ��Ԥ��ֵ��ʵ��ֵ��ƽ��������Ϊ1.80%��У������ϵ��Ϊ0.993��������IJɿ����߽��ߡ�����Ͷ��屩¶����Ȳ������ӷ���ʵ�������
�ؼ���:���ӻ����ɿ�������ά����̽�⣻�������飻BP�����磻���������������
��ͼ�����:TD76 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��03-0758-09
Environmental error correction of 3D laser detection for goaf based on BP neural network
HOU��Pengyuan1, XU��Shuai1, LIANG��Ruiyu1, JI��Xiaofei2
(1. Key Laboratory of Ministry of Education on Safe Mining of Deep Metal Mines, Northeastern University, Shenyang 110819, China��
2. Shandong Gold Group Chifeng Hongling Nonferrous Mining Co. Ltd., Chifeng 025450, China)
Abstract: A simulation device of environment for high-temperature, high-humidity and dusty goaf in underground metal mine was developed to study the distortion for 3D laser detection results. Multi-factor experiments, involving temperature, relative humidity, and dust concentration, were carried out for error analysis and correction based on 64 orthogonal tests. The BP neural network model was built and used for predicting detection errors. The results show that with the increase of relative humidity, the average error ratio of point cloud shows an S-shape curve increase, and the growth rate obviously accelerates as the relative humidity is between 75.0% and 85.0%. Furthermore, the error ratio also increases linearly with the increase of dust concentration. The growth rate is the largest when a dust concentration is between 40 mg/m3 and 100 mg/m3, the lowest rate occurs when the dust concentration is less than 40 mg/m3 and the modest rate occurs with the dust concentration greater than 100 mg/m3. However, the temperature has little effect on the average error ratio of point cloud. The average relative error is 1.80% and correction coefficient is 0.993. The modified parameters, such as boundary height, volume and roof exposed area, in the complex goafs of a lead-zinc mine, are more in line with the actual situation.
Key words: complex goaf; three-dimensional laser detection; orthogonal test; BP neural network; error analysis; error correction
�ɿ�����ά����̽�����ü��⿹������ǿ�����侫�ȸߵ��ص㣬�ɶԲɿ������о������Ի�ȡ��ά��������������̽��Ч�ʸߡ�̽�����ݴ�����㡢���ӻ�Ч���õ��ŵ�[1-2]�����㷺Ӧ���ڵ��½�����ɽ�Ŀ�����̬̽��[3-5]����ʵ��̽���У������豸���ء���Ϊ���غͻ��������ۺ�Ӱ��[6]����ȡ�ĵ���������������һ�������²ɿ�����ά����̽����ʧ�棬�Կ����������п���ա�ƶ����ƺͰ�ȫ��ܵ�������Ӱ�죬�����ڿ�ɽ��ȫ����Ч�����ÿ���[7-9]��������ѧ������豸ϵͳ������ΪżȻ�������˴����о������ü������η�[10]�������ʷ������㷨[11]���쳣���ƹ���[12]�ȷ�������̽������ϵͳ����еIJ�����������λ�������ߺ��쳣�������ݽ����˷��������������Ӧ��ϵͳУ��������ģ�����������ʽ������Ŀ������ı���ֲڶ�[13]������˥��ЧӦ[14]��ԴƵ��[15]��Ӱ�����ؿ�չ��̽�������о��������������������Դ����ά����̽�⾫�ȵ�Ӱ�졣���ǣ���ɽ���������вɿ���ͨ�������ϲ�ڸ��¡���ʪ���ۺ������£����ұ��Ƶ��������̲����Ĵ���������۳������ڿ����ڲ��γɹ�Һ����ϵ�����ܽ�����[16]���Լ���������������˥�������ؽ����˲ɿ�����ά����̽�����ݵ�ȷ�ԡ�Ŀǰ��Ե��½�����ɽ���¡���ʪ����۳����ӻ���Ӱ�����ض���ά����̽�������о����٣������µ�[6]��Ͼ������Դ����չ�˲ɿ�����ά����̽���ֳ����飬���ڻ�ɫ�������۷����˸�Ӱ�����ضԵ��ƾ��ȵ�Ӱ��Ȩ�أ������̽��ľ��ȡ������ڸ�����ɽ����������ͬ���ֳ��������ý��������ƹ�Ӧ����������ɽ�����о�����ܵ������ơ���˧��[17]������ʪ�Ⱥͷ۳�����Ũ�Ƚ��������ڵ�����̽�������������������飬���������Ӧ�����������ʽ����һ���̶��������̽������ȷ�ԡ�����ʵ��̽����У�̽�⾫���������¶ȡ����ʪ�Ⱥͷ۳�����Ũ�ȵ��ۺ�����Ӱ�죬������Ӱ����������ȷ���д���һ�����������ڴˣ�����������Ծ��¸���-��ʪ-��ĸ���̽���������˻���ģ��ʵ��װ�ã���������������Ʒ�������չ�¶ȡ����ʪ�Ⱥͷ۳�����Ũ���ۺϻ�����̽��������������ʵ�飻����̽������BP������Ԥ��ģ�ͣ�����Ԥ��ģ��Ӧ����ijǦп��Ŀ���̽�⡣
1 �������
1.1�������������
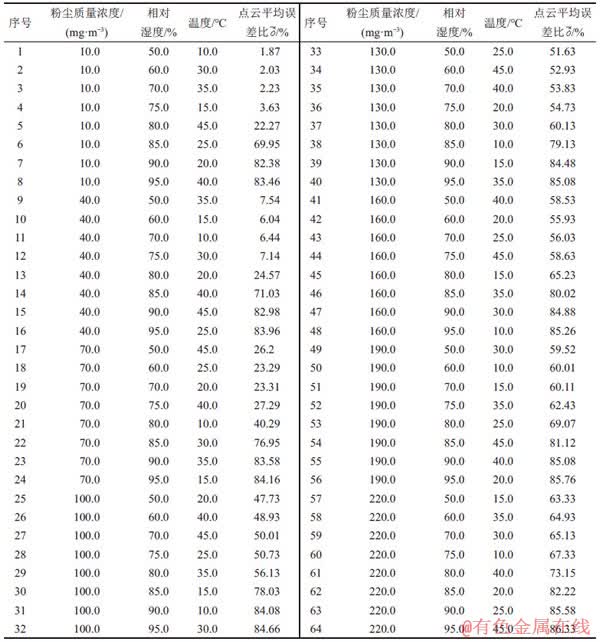
�ɿ�����ά����̽�����Ļ���Ӱ��������Ҫ�����¶ȡ����ʪ�Ⱥͷ۳�����Ũ��[6]��Ϊ�����������ض�̽������Ӱ��̶ȣ�ÿ����������8��ˮƽ���õ�������������ˮƽ�������1��ʾ������SPSS����Orthogonal Design�������L64(83)�������鷽����ơ�
��1��������������ˮƽ��Ʊ�
Table 1��Factors and levels of orthogonal experiments

1.2�������豸�����
�ɿ�����ά����̽���豸Ϊ���ô�Optech��˾CMS V400���������뷶ΧΪ0.15~150.0 m������ֱ���Ϊ1.0 mm����ֱɨ��Ƕȷ�ΧΪ0��~360�㣬ˮƽɨ��Ƕȷ�ΧΪ0��~290�㡣
CMS V400������̽ͷ���ⷢ����Ϊ����ԭ����ڲ�����ϵͳ����ά����ɨ��������ͼ1��ʾ�����У�x��Ϊ��̽ͷ���߷���ȡɨ�跽��Ϊ��������ϵ������������ϵ��CMS�������ļ��㹫ʽ���£�
ʽ�У�sΪ̽��㵽���ⷢ����ľ��룬m����Ϊ̽���ͼ��ⷢ����������ɨ����ļнǣ�(��)��
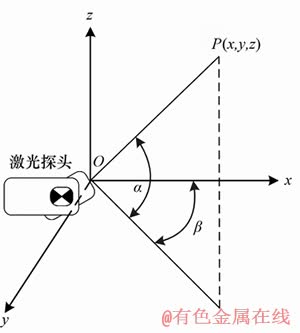
ͼ1����ά����ɨ������ʾ��ͼ
Fig. 1��3D laser scanning coordinate diagram
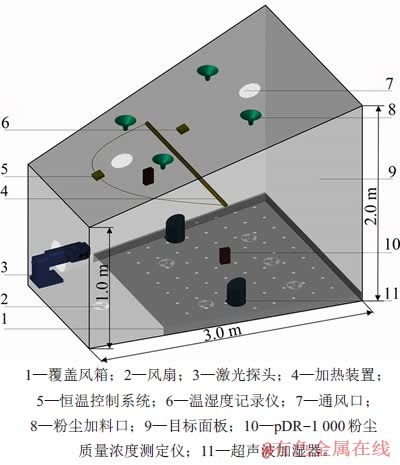
ͼ2�����ӿ�������ģ��װ����άͼ
Fig. 2��Three-dimensional diagram of environment simulator for complex goaf
ʵ��۳�ѡ�û�ѧ���ʲ����á���Ե�����������õĻ�ʯ�ۣ��۳�����Ũ�Ȳⶨ��ΪPersonal Data RAM(pDR-1000)������Ũ�Ȳ�����ΧΪ0.001~400.000 mg/m3����Ӧ������ΧΪ0.1~10.0 ��m����������ʪ������Ƶ��Ϊ1.7 MHz��ˮ����������10.0 ��m���¶ȼ�¼�ǵIJ�����Χ�뾫�ȷֱ�Ϊ-40.0~85.0 ���0.1 �棻ʪ�ȼ�¼�ǵIJ�����Χ�뾫�ȷֱ�Ϊ0~100.0%��0.1%�����¿���ϵͳ�Ŀ��Ʒ�Χ�뾫�ȷֱ�Ϊ0~50.0 ���0.1 �档
1.3������װ���뷽��
���Ӳɿ���̽���ģ��װ����ͼ2��ʾ������ܹ�Ϊ201�Ͳ���ֹܺ��Ӷ��ɵ������ܷ��塣ǰ���ѡ�����л��������Ƴɣ��м�Ԥ��ֱ��Ϊ30 cm��Բ�ף��Ա�۲�ʵ����̡����������ѡ�ú��Ϊ1 cm��ľ��ӹ����������к����(Ŀ�����)Ϳ�а�ɫ������ϣ��������ķ����ʡ��ײ����Ƕ����6���ɵ��ڹ��ʵķ��ȣ����Ϸ����Ǿ��Ȳ���Բ��ͬ�ߴ���䣬�Ա����������������������ﳾ���������Ԥ����2��ͨ��ں�4���۳����Ͽڣ���֤ʵ������з۳�����Ũ�ȴﵽ������Χ�ڵĶ�̬ƽ�⡣�������ֱ�װ��1̨pDR-1000�۳�����Ũ�Ȳⶨ�ǣ��Լ��۳�����Ũ�ȵı仯�����װ���ڲ�����2̨��������ʪ����1̨��ʪ�ȼ�¼�Ǻ�1���¿���ϵͳ���Ա�֤ʵ�������ʪ�ȴﵽ������Χ�ڵĶ�̬ƽ�⡣
ʵ��ǰ��ͨ��Nivo2.Mȫվ�ǶԼ���̽ͷ���İб��ʵ��װ�ö����������У������֤����̽�������������ϵ��һ���ԡ�
������ʪ�ȡ�50.0%�����ڷ۳�����Ũ�ȡ�10.0 mg/m3������25 ���£���1��1��ɨ�辫�ȶ�Ŀ����������ά����̽�⣬��Ϊʵ����ı����գ�ȷ�����������Χ��
��������������Ʒ�������Բ�ͬ�¶ȡ����ʪ�Ⱥͷ۳�����Ũ�ȵ�ʵ��������չʵ����̽�⣬��ÿ��̽���ظ�3�Σ������ֵ�Խ���żȻ��̽�����ͨ������ƽ�����ȱ�����

ʽ�У�
ͨ��ʽ(2)����ɵ�m����������




ʽ�У�
2 �����������
���������2��ʾ���ӱ�2�ɼ�������ָ�����ƽ�����ȵı仯��ΧΪ1.87%~86.33%��
��2������������
Table 2��Orthogonal test results
2.1��̽�����ĵ����������Է���
ѡȡ������ˮƽ��=0.05�����÷���������۷�����Ӱ�����ض�̽�����������ԣ�������3��ʾ���ɱ�3��֪���۳�����Ũ�Ⱥ����ʪ�ȵ�������sigֵΪ0���������߶Ե���ƽ�����ȵ�Ӱ�춼�dz�����������Mie��������ɢ�侭������[18]��֪����Ϊ�����е�ˮ�Լ�����������ã�����������ת��Ϊ��ѧ���ܻ��ȶ����Լ����������Լ���ķ��䡢�������ã��ı伤��䷽�Ӷ����¼���˥����
�ɱ�3����֪�����ʪ�ȵ�F(25.436)���ڷ۳�����Ũ�ȵ�F(14.172)��˵����۳�����Ũ����ȣ����ʪ�ȶԵ���ƽ�����ȵ������Ը��ߣ��¶ȵ�������sigֵΪ0.744(��0.05)����ʾ��Ե���ƽ�����ȵ�Ӱ�첻������
��Ӱ�����ضԵ���ƽ�����ȵ������ԴӴ�СΪ���ʪ�ȡ��۳�����Ũ�ȡ��¶ȡ����ݷ���������ۣ�������ǿ������Ӧ���ȿ��ǣ��������������ؿ���������ˮƽ��ѡ�����Ӧ���ȿ������ʪ�Ⱥͷ۳�����Ũ�ȣ����Բ������¶ȵ�Ӱ�졣
2.2��̽�����ĵ�����Ӱ�����
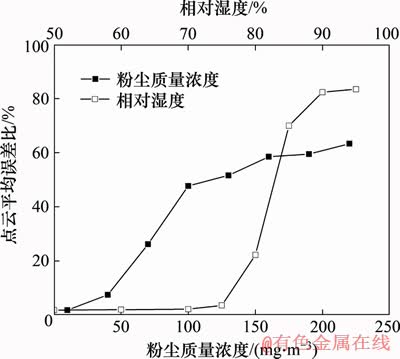
Ϊ��ӳ��Ӱ�����ض�����ָ���Ӱ����ɣ��ֱ�ѡȡ��2�з۳�����Ũ��Ϊ10.0 mg/m3�����ʪ��Ϊ50.0%ʱ��������������������Ӱ�����������ƽ�����ȹ�ϵ�������ͼ3��ʾ��
��ͼ3��֪������ƽ�����������ʪ�Ⱥͷ۳�����Ũ�ȳʷ���������ء������ʪ�����ߣ�����ƽ�����ȳʡ�S�������������������ʪ�Ƚ���75.0%~85.0%ʱ�������������Լӿ졣��۳�����Ũ��������ƽ��������40 mg/m3��100 mg/m3Ϊ�ڵ������ʽ�������������۳�����Ũ�Ƚ���40~100 mg/m3ʱ������������죬�۳�����Ũ�ȴ���100 mg/m3ʱ��֮���۳�����Ũ��С��40 mg/m3ʱ��͡��ɴ˿ɼ����ɿ�����ά����̽�⾫�ȶԷ۳�����Ũ�Ⱥ����ʪ����Ӧ��Χ�����仯�������ʪ�ȶ�����ָ��ĵ��ڷ�Χ��Է۳�����Ũ�ȸ������뷽�������������
3 BP������ģ��Ԥ��̽�����
�ɿ�����ά����̽��������ʪ��Ȼ���Ӱ�����س��ָ߶ȷ����ԣ����ô�ͳͳ�ƻع鷽����������Ӧ����ѧģ��������������̽����BP��������һ����Ϣ���ݺ������Ķ��ǰ�����磬����ǿ��Ĵ������������������[19]�����Ļ���BP�����磬����̽��������Ԥ��ģ�ͣ�ʵ�ָ�ʪ��ۺϻ����²ɿ�����ά����̽������Ԥ���������
3.1��BP������ģ��ѡȡ
BP������ģ�ͽṹ��ͼ4��ʾ��������У������ʪ�Ⱥͷ۳�����Ũ��2��������Ϊ�����������ӣ��������У���Ԫ��Ŀ����ѵ�����������̶ȡ�ѵ��ʱ���Լ�ѵ������ˣ�ȷ����Ԫ��Ŀ��ģ��������Ҫ��HECHT-NIELSEN��[20]ָ����Ԫ��Ŀһ��Ϊ(2k+1)ʱ���ţ�����kΪ�����������ӵĸ���(����Ԫ��ĿΪ5)��Ϊ��֤BP������ģ��Ԥ�⾫�ȣ�ѡȡ��Ԫ��ĿΪ2~13��������У��Ե���ƽ��������Ϊ����������ӡ�
��3���������������������
Table 3��Anova table of orthogonal test results

ͼ3��Ӱ������������ָ��Ĺ�ϵ
Fig. 3��Relationship between influencing factors and evaluation indexes
3.2�����ݹ�һ������
Ϊ�����������������ӵ��������٣����BP������ѧϰ�ٶȺ�����Ч�ʣ�ͨ��ʽ(4)���������ݽ��й�һ������������ת��Ϊ���пɱ��Ե����ݣ��ֲ���[0,1]�����ڡ�

ʽ�У�PiΪ��һ�����������PkΪԭʼ�������ݣ�Pmax��Pmin�ֱ�Ϊԭʼ�������ݵ����ֵ����Сֵ��
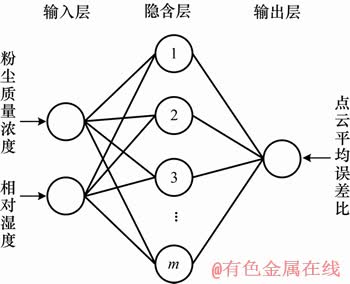
ͼ4��BP������ģ�ͽṹͼ
Fig. 4��Structure diagram of BP neural network model
3.3��̽������Ԥ�������
����MATLAB R2018bƽ̨��ѡȡ�����������е�54��������������ѵ����10���������ڼ�������;������������������㴫�ݺ���Ϊ����S�ͷ����Դ��ݺ���TANSIG������ѵ������ΪLevenberg-Marquardt�㷨��TRAINLM������ѧϰ����Ϊ���������LEARNGDM������ѵ����������Ϊ1 000�Σ�Ŀ�����Ϊ1.0��10-6�������Ԫ�IJ�ͬ��Ŀ�������������BP������ģ�;����������������㹫ʽΪ
��4����ͬ��Ԫ��Ŀ��BP������ģ��Ԥ�⾫��
Table 4��Prediction accuracy of BP neural network model with different number of neurons


ʽ�У�



ͼ5������ƽ������ʵ��ֵ��Ԥ��ֵ�������
Fig. 5��Fitting curve between measured and predicted values
���������4��ʾ���ӱ�4�ɼ�������Ԫ��ĿΪ6ʱ��BP������ģ��Ԥ�⾫����ߣ�Ԥ��ֵ��ʵ��ֵƽ��������Ϊ1.80%������10�����������ʵ��ֵ��Ԥ��ֵ����������ָ�����Աȷ���ͼ��������������ϣ������ͼ5��ʾ����ͼ5��֪������ƽ�����ȵ�У������ϵ��Ϊ0.993������Ԥ�������ʵ��������кܸߵ�����ԡ��ɴ˿ɼ�����Ԫ��ĿΪ6��BP������ģ�Ϳ������ʪ��ۺϻ�����̽������Ԥ����������������ʪ�����÷�ΧΪ50.0%~95.0%���۳�����Ũ�ȵ����÷�ΧΪ10.0~220.0 mg/m3��
4 ����Ӧ��
ijǦп����ô�ֱ��ο��زɣ������ڲ���������������ʯ��Ϊ���������ͽ�һ�����մ�����ʯ���Կ�����̬��������ά���⾫̽�⡣̽������ķ۳�����Ũ�Ⱥ����ʪ�ȵľ�ֵ�ֱ�Ϊ16.13 mg/m3��75.5%�����й�һ��������ֱ�Ϊ0.191��0.633��ͨ����������BP������ģ�ͽ��е���ƽ������Ԥ�⣬Ԥ����Ϊ4.68%�����Դ˽���̽�������������������ǰ���װģ�ͶԱȽ����ͼ6��ʾ��
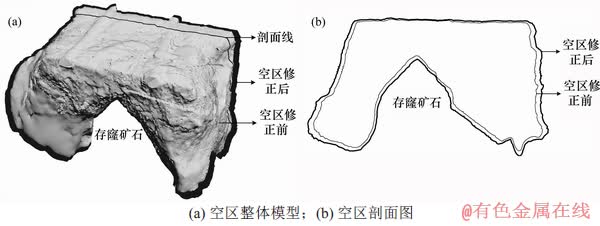
ͼ6��̽���������ǰ���װģ�ͶԱ�
Fig. 6��Comparison diagram of model before and after modification for goaf
��5��̽����������Ա�
Table 5��Parameters comparison of goaf

Ϊ�˽�һ������BP������ģ��Ԥ�⾫�ȣ���̽���������ͨ�罵ʪ�����������ʪ�Ⱥͷ۳�����Ũ�ȴﵽ������Χ�Կ���������ά����̽�⣬�����߽�����Ա����5��ʾ��
�ɱ�5��֪�����������̽�����ģ�Ͷ���������0.82 m���װ����½�1.67 m����¶�������78.08 m2�������������2 863.97 m3���Ա�������Ŀ���ģ�ͺͽ�ʪ�������̽��ģ�ͷ��ֶ�����һ�¡��ɴ˿ɼ���������������BP������ģ�͵�Ԥ�⾫�ȿ�����ʵ�ʹ���Ӧ����Ҫ��
5 ����
1) ����¶ȡ����ʪ�Ⱥͷ۳�����Ũ�ȣ���չ�ɿ�����ά����̽�������������������������顣��Ӱ�����ص������ԴӴ�С����Ϊ���ʪ�ȡ��۳�����Ũ�ȡ��¶ȡ�
2) �����ʪ�����ߣ�����ƽ�����ȳʡ�S�������������������ʪ�Ƚ���75.0%~85.0%ʱ�������������Լӿ죻��۳�����Ũ��������ƽ��������40 mg/m3��100 mg/m3Ϊ�ڵ������ʽ�������������۳�����Ũ�Ƚ���40~100 mg/m3ʱ������������죬�۳�����Ũ�ȴ���100 mg/m3ʱ���������ʴ�֮���۳�����Ũ��С��40 mg/m3ʱ������������͡�
3) ��64������������Ϊ����������������Ԫ��ĿΪ6��BP������ģ�͡�Ԥ�������ʵ�������ƽ��������Ϊ1.80%��У������ϵ��Ϊ0.993���������ʪ��ۺϻ�����̽������Ԥ���������
4) Ӧ�ý�����BP������Ԥ��ģ�Ͷ�ijǦп��ɿ�����ά����̽�����ݽ������������������IJɿ������װ��ߡ�����ͱ�¶���������ʵ�������������ʵ�ʹ���Ӧ����Ҫ��
�ο����ף�
[1] JAROSZ A P. Open stope cavity monitoring for the control of dilution and ore loss[C]//Proceeding of MPES. Netherlands: A A BALKEMA, 2000: 63-66.
[2] ARMESTO J, ROCA-PARDINAS J, LORENZO H, et al. Modelling masonry Arches shape using terrestrial laser scanning data and nonparametric methods[J]. Engineering Structures, 2010, 32(2): 607-615.
[3] SLATTERY K T, SLATTERY D K, PETERSON J P. Road construction earthwork volume calculation using three-dimensional laser scanning[J]. Journal of Surveying Engineering, 2012, 138(2): 96-99.
[4] LUO Zhouquan, LIU Xiaoming, ZHANG Bao, et al. Cavity 3D modeling and correlative techniques based on cavity monitoring[J]. Journal of Central South University of Technology, 2008, 15(5): 639-644.
[5] LOU Shuhan, YANG Biao, LUO Zhouquan. Three-dimensional information acquisition and visualization application in goaf[J]. Procedia Engineering, 2014, 84: 860-867.
[6] ������, ����ȫ, ̷����, ��. �ɿ�������̽�⾫��Ӱ�����ط������������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(4): 1244-1250.
XIONG Lixin, LUO Zhouquan, TAN Langlang, et al. Impact factors analysis and error correction of laser scanning for goaf[J]. Journal of Central South University(Science and Technology), 2014, 45(4): 1244-1250.
[7] PALAMARA D R, NICHOLSON M, FLENTJE P, et al. An evaluation of airborne laser scan data for coalmine subsidence mapping[J]. International Journal of Remote Sensing, 2007, 28(15): 3181-3203.
[8] HODGE R A. Using simulated Terrestrial Laser Scanning to analyze errors in high-resolution scan data of irregular surfaces[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(2): 227-240.
[9] COVENEY S, STEWART FOTHERINGHAM A. Terrestrial laser scan error in the presence of dense ground vegetation[J]. The Photogrammetric Record, 2011, 26(135): 307-324.
[10] ������, ������, ����. ���ڼ������η���RIEGL VZ-400����ɨ���Ǿ��Ȳ��Է����о�[J]. ���̿���, 2011, 39(3): 63-66, 81.
ZHANG Qifu, SUN Xianshen, WANG Li. Research of methods to test accuracy of RIEGL VZ-400 laser scanner based on simple six-range analytical method[J]. Geotechnical Investigation & Surveying, 2011, 39(3): 63-66, 81.
[11] ����ȫ, ������, ���ķ�, ��. ���Ӳɿ�������ɨ��ƴ��ɢ�ҵ�������ͶӰ�����ʷ��㷨[J]. ���̿�ѧѧ��, 2015, 37(7): 823-830.
LUO Zhouquan, LUO Zhenyan, ZHANG Wenfen, et al. Spherical projection triangulation algorithm for laser-scanning splice unorganized points of complex goafs[J]. Journal of University of Science and Technology Beijing, 2015, 37(7): 823-830.
[12] ������, ����ȫ, ������, ��. ����ӻ����²ɿ�������ɨ���쳣������������[J]. ������ѧѧ��(��Ȼ��ѧ��), 2014, 35(3): 438-442, 446.
XIONG Lixin, LUO Zhouquan, LUO Zhenyan, et al. Data amendment of abnormal point cloud of goaf by laser scan in deep complex environment[J]. Journal of Northeastern University(Natural Science), 2014, 35(3): 438-442, 446.
[13] ֣�»�, ������, ����. ��ά����ɨ���Ǽ���������Ӱ�����ط���[J]. ��湤��, 2005, 14(2): 32-34, 56.
ZHENG Dehua, SHEN Yunzhong, LIU Chun. 3D laser scanner and its effect factor analysis of surveying error[J]. Engineering of Surveying and Mapping, 2005, 14(2): 32-34, 56.
[14] ����ϼ, ���. ��ά����ɨ�輼����Ӧ���е�������[J]. �����ѧѧ��, 2012, 24(3): 17-20.
WANG Hongxia, WU Cheng. 3D laser scanning technology and error analysis in the application process[J]. Journal of Gansu Sciences, 2012, 24(3): 17-20.
[15] ����. ��ά����ȫ��ɨ��ϵͳ������������궨[D]. ����: ��ʦ����ѧ��Դ����������ѧԺ, 2009: 9-15.
LIU Jia. 3D laser panoramic scanning system error analysis and camera calibration[D]. Beijing: Capital Normal University. College of Resource Environment and Tourism, 2009: 9-15.
[16] ��־, Ҷ�¾�, �����, ��. 2���˿��³��ÿ��ֶ����ܽ����ӵĹ��������о�[J]. ��ȫ�뻷��ѧ��, 2015, 15(5): 64-68.
LI Zhi, YE Yongjun, WU Yucheng, et al. On the filtering characteristic features of the two kinds of common masks used in an underground uranium mines[J]. Journal of Safety and Environment, 2015, 15(5): 64-68.
[17] ��˧, ����Զ, ������, ��. ��ʪ��ɿ�����ά����̽������������������[J]. ������ѧѧ��(��Ȼ��ѧ��), 2019, 40(9): 1330-1336.
XU Shuai, HOU Pengyuan, LIANG Ruiyu, et al. Error analysis and correction of 3D laser detection data for high-humidity and dusty goafs[J]. Journal of Northeastern University(Natural Science), 2019, 40(9): 1330-1336.
[18] BOHREN C F, HUFFMAN D R. Absorption and scattering of light by small particles[M]. New York: Wiley VCH, 1998: 3-11.
[19] �¿�, ��ǫ, �µ���, ��. ��ʯ����������ϳ�����ǿ������-BP������ģ���о�[J]. ����������ӹ�, 2018, 47(10): 60-64, 68.
WEN Kai, GAO Qian, CHEN Dexin, et al. Orthogonal-BP neural network model for strength of phosphogypsum-based cementitious material backfill[J]. Industrial Minerals & Processing, 2018, 47(10): 60-64, 68.
[20] HECHT-NIELSEN R. Kolmogorov's mapping neural network existence theorem[C]//Proceedings of the First International Conference on Neural Networks. San Diego, California: IEEE, 1987: 11-14.
���༭ �Կ���
�ո����ڣ� 2019 -05-19; �����ڣ� 2019 -08 -29
������Ŀ(Foundation item)�������ص��з��ƻ���Ŀ(2018YFC0604400)��������Ȼ��ѧ����������Ŀ(51874068)�������У��������ҵ��ר���ʽ�������Ŀ(N160107001, N180701016, N2001003)��������ѧ�������ɽ��ȫ���ɽ������ص�ʵ���ҿ��Ż���������Ŀ(2017SMDM-KF-A02) (Project(2018YFC0604400) supported by the National Key R&D Program of China; Project(51874068) supported by the National Natural Science Foundation of China; Projects(N160107001, N180701016, N2001003) supported by the Fundamental Research Funds for the Central Universities; Project(2017SMDM-KF-A02) supported by the Teaching Program Foundation of Key Laboratory of Ministry of Education on Safe Mining of Deep Metal Mines in Northeastern University)
ͨ�����ߣ���˧����ʿ�������ڣ������Ѳɿ��������������֧�������о���E-mail��xushuai@mail.neu.edu.cn
ժҪ:Ϊ���о����½�����ɽ����-��ʪ-����ӻ����Բɿ�����ά����̽�⾫�ȵ�Ӱ�죬�з��ɿ������ӻ���ģ��װ�ã����64���������鷽���������¶ȡ����ʪ�Ⱥͷ۳�����Ũ�ȶ�̽������Ӱ�첢����������Ϊ��һ������̽��������BP������Ԥ��ģ�ͣ���Ӧ����ijǦп��ɿ�����̽���С��о���������������ʪ�����ߣ�����ƽ�����ȳʡ�S�������������������ʪ�Ƚ���75.0%~85.0%ʱ�������������Լӿ죻��۳�����Ũ��������ƽ��������40 mg/m3��100 mg/m3Ϊ�ڵ������ʽ�������������۳�����Ũ�Ƚ���40~100 mg/m3ʱ������������죬���۳�����Ũ�ȴ���100 mg/m3ʱ���������ʴ�֮�����۳�����Ũ��С��40 mg/m3ʱ������������ͣ��¶ȶԵ���ƽ������Ӱ���С��ģ��Ԥ��ֵ��ʵ��ֵ��ƽ��������Ϊ1.80%��У������ϵ��Ϊ0.993��������IJɿ����߽��ߡ�����Ͷ��屩¶����Ȳ������ӷ���ʵ�������
[13] ֣�»�, ������, ����. ��ά����ɨ���Ǽ���������Ӱ�����ط���[J]. ��湤��, 2005, 14(2): 32-34, 56.
[14] ����ϼ, ���. ��ά����ɨ�輼����Ӧ���е�������[J]. �����ѧѧ��, 2012, 24(3): 17-20.
[15] ����. ��ά����ȫ��ɨ��ϵͳ������������궨[D]. ����: ��ʦ����ѧ��Դ����������ѧԺ, 2009: 9-15.
[16] ��־, Ҷ�¾�, �����, ��. 2���˿��³��ÿ��ֶ����ܽ����ӵĹ��������о�[J]. ��ȫ�뻷��ѧ��, 2015, 15(5): 64-68.
