
һ�ֳ߶Ⱥ���ת����Ӧ��Ŀ������㷨
���վ�1������1���Զ���2
(1. ���ϴ�ѧ �Զ������������ѧԺ��ɽ�� ���ϣ�250022��
2. �Ͼ����պ����ѧ ����ѧԺ������ �Ͼ���210016)
ժ Ҫ��
���еij߶Ⱥ���ת���⣬���һ�ֻ��ڳ߶Ȳ��������任(SIFT)�;�ֵƯ�Ƶ�Ŀ������㷨�����㷨���ȼ��ģ�������Ŀ�������ڳ߶ȿռ��еļ�ֵ�㣬Ȼ��ͨ�������ά���κ�����ȷ��λ�������λ�úͳ߶ȣ����Ŷ�Ŀ�������ģ����������������ƥ�䣬����������֮֡��߶ȺͽǶȵ������ԣ�ȥ����ƥ�䣬���������ȷƥ����������еij߶ȺͽǶ���Ϣ�����㱻����Ŀ��ij߶Ⱥ���ת�Ƕȡ��о������������������Ŀ��ĽǶȺͳ߶ȷ����仯ʱ�����㷨�Ծ��нϺõĸ���Ч����
�ؼ��ʣ�
Ŀ��������߶Ȳ��������任(SIFT)����ֵƯ���㷨���߶ȿռ���
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2013)06-2354-07
A scale and rotation adaptive algorithm for object tracking
ZHAO Qinjun1, ZHANG Yong1, ZHAO Dongbiao2
(1. School of Electrical Engineering, University of Jinan, Jinan 250022, China;
2. College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract: In order to solve the problem of scale and rotation in image object tracking, a novel object tracking algorithm based on Scale Invariant Feature Transform (SIFT) and Mean Shift was proposed. Firstly, scale-space extrema in the model area and object area are detected and accurate positions and scales of the feature points were located by fitting 3D quadratic functions. Secondly, feature points in model area and object area were matched and the mismatched points were eliminated according to continuity of scale and angle between adjacent frames. Lastly, the scale and rotation angle of the object being tracked were calculated by using the scale and angle information which was provided by the feature points correctly matched. Experimental results show that the proposed algorithm has good tracking effect no matter whether the scale or the angle of the object changes.
Key words: object tracking; Scale Invariant Feature Transform (SIFT); Mean Shift algorithm; scale space
��Ƶͼ�������е��˶�Ŀ�����[1-2]�Ǽ�����Ӿ�������о��ȵ�֮һ�������ü�����Ӿ���������Ƶ��������������Ƶ����װ�õõ���ͼ�����н����Զ������������е��˶�Ŀ����м�⡢��ȡ��ʶ����٣���ȡĿ���״̬��������ʵ�ֶ��˶�Ŀ�����Ϊ���⣬��ɸ���һ��������������Ƶ��ء����ܽ�ͨ���˻����������������Լ��������Ӿ��������������Ź�����Ӧ�ÿռ䡣��ˣ��о���ƵĿ�������ؼ���������Ҫ��ѧ�������ʵ�ü�ֵ����ĿǰĿ�������ʵ��Ӧ���������ٺܶ����ѣ����磬���ٹ��������ھ�ͷ�佹������Ŀ�����ž�ͷ���߷�����˶���ͼ���е�Ŀ���С���ᷢ�����Ա仯������Ŀ����������ת��������ƾ�ͷ���ߵ���ת�˶���ͼ����Ŀ��ĽǶȶ��ᷢ�����Ա仯��³���ĸ����㷨��Ҫ����ȷ����Ŀ�����Щ�߶Ⱥ���ת�仯��Mean Shift�㷨[3-6]��Ŀ����������л���˳ɹ�Ӧ�ã������м�����С��ʵʱ�Ժõ��ŵ㣬�����㷨���ܸ���Ŀ�����ת�仯������Ŀ��ij߶ȱ仯��Comaniciu��[3, 7]����ˡ�10%�������ֱ�Ժ˴��ڿ��Ƚ��������ķ������÷��������ڵ�ǰ֡����3����ͬ��С�ĺ˽���3�ζ�����Mean Shift���ټ��㣬Ȼ��ѡ��ϴ��Bhattacharyyaϵ������Ӧ�Ĵ��ڿ�����Ϊ��ǰĿ��ĺ˴��ڿ��ȡ���Ŀ������Сʱ���÷������Եõ��Ϻõ�Ч�������ǵ�Ŀ��������ʱ���˴��ڿ��Ⱥ�����������С��������Ϊ����Bhattacharyyaϵ���������Զ����������ڽ�С�ĸ��ٴ����дﵽ�ֲ����Liu��[8]��Ȼ���ԽϺõ���ӦĿ��߶ȵı仯�����Dz��ܸ���Ŀ��ĽǶȱ仯�Ը��ٴ��������ʵ��ĵ�������������[9-10]��Ŀ��������ݶȷ���ֲ�(ֱ��ͼ)Ϊ��������Ч�����Ŀ������е���ת���⣬����������Ŀ��߶ȷ����仯�������SIFT�㷨[11]��Lowe���ܽ�����������еĻ��ڲ�����������������ⷽ���Ļ����ϣ���2004����ʽ�����ͼ��ֲ����������㷨�����㷨��һ�ֻ��ڳ߶ȿռ�ġ���ͼ�����š���ת��������任�����в����Ե�ͼ��ֲ����������㷨��Mikolajczyk��[12]ͨ������SIFT�������ڵ�10�־ֲ��������������IJ����ԶԱ�ʵ�飬������SIFT������չ�㷨��ͬ�����������о�����ǿ�Ľ�׳�ԡ�ţ�����[13]�����һ�ֻ���SIFT�����������˲���Ŀ����ٷ������Ϻõؽ����Ŀ������еij߶Ⱥ��ڵ����⣬Zhou��[14]��SIFT�㷨��Mean Shift�㷨�����������Ŀ�꣬����2�ַ���Ҳ��û�и���Ŀ���˶������еĽǶ���Ϣ��Ϊ��ͬʱ���Ŀ������еij߶��������ת���⣬��ͼ��ƥ���г��õ�SIFT�㷨���������������������һ���µĻ��ڳ߶Ȳ��������任�;�ֵƯ�Ƶ�Ŀ������㷨�����㷨���øĽ���SIFT�㷨��ȡ���������еij߶ȺͽǶ���Ϣ�����㱻����Ŀ��ij߶Ⱥ���ת�Ƕȣ���Ч�����Ŀ������еij߶Ⱥ���ת���⣬���нϺõ�³���ԡ�
1 Mean Shift�����㷨������
1.1 Ŀ��ģ�͵�����
Mean Shift�㷨����Ҫ��Ŀ����г�ʼ�����ڰ���Ŀ�����ʼ֡����һ����������Ŀ����������С��������������Ŀ���Ŀ��������Ŀ���������������Ϊx0���˺�������������Ϊk(x)�������Ϊh����ô����Ŀ�������ڵ��������ص� ��i=1��2������n�����Լ��������ռ���ÿ������ֵ�ĸ��ʡ���Ӧÿһ������u=1��2������m��Ŀ�����ģ�Ϳ��Ա�ʾΪ��
��i=1��2������n�����Լ��������ռ���ÿ������ֵ�ĸ��ʡ���Ӧÿһ������u=1��2������m��Ŀ�����ģ�Ϳ��Ա�ʾΪ��
���У�CΪ��������ϵ��������b�ͦĵ��������ж�xi������ɫֵ�Ƿ���������ֵu��
1.2 ��ѡģ�͵�����
��ѡĿ��������ָ�ڵڶ�֡���Ժ��ÿ֡�п��ܰ���Ŀ����������ѡĿ�������ڵ��������ص�Ϊ{xi}��i=1��2������nh����ѡĿ�����������Ϊy���˺�������������Ϊk(x)�������Ϊh�����Ӧÿһ������u=1��2������m�ĺ�ѡĿ�����ģ�Ϳ��Ա�ʾΪ��
1.3 �����Զ�������
��Ŀ��ģ�͵������ĸ����ܶȷֲ�Ϊq����ǰ֡����yΪ���ĵĺ�ѡĿ��ģ�͵ĸ����ܶȷֲ�Ϊp(y)�������Զ���������������Ŀ��ģ�ͺͺ�ѡģ��֮������Ƴ̶ȣ�����ѡ��Bhattacharyyaϵ����Ϊ�����Զ����������䶨��Ϊ��
1.4 Ŀ�궨λ
Ϊʹʽ�� �����ѡĿ������������ȶ�λΪǰһ֡��Ŀ�������λ��y0������һ�㿪ʼѰ����Ŀ��ģ�������Ƶ�Ŀ���������ڵ�ǰ֡��Ŀ�����ʵλ��Ϊy����Ҫ�����ڵ�ǰ֡��y0����ѡĿ�����������
�����ѡĿ������������ȶ�λΪǰһ֡��Ŀ�������λ��y0������һ�㿪ʼѰ����Ŀ��ģ�������Ƶ�Ŀ���������ڵ�ǰ֡��Ŀ�����ʵλ��Ϊy����Ҫ�����ڵ�ǰ֡��y0����ѡĿ����������� ��u=1��2������m��������ʽ����̩��չ�����ɵã�
��u=1��2������m��������ʽ����̩��չ�����ɵã�

ʽ�е�1����Ŀ�����ʵλ��Ϊy�أ���ˣ�����ֻ������2���
ʽ��������Ȩֵwiʱ�ĺ��ܶȹ��ƣ�ͨ����������ʽ�ľ�ֵƯ���������ɵ�Ŀ�����Ĵ���ʼ��y0����ʵλ�õ�y�ƶ�����������ֵƯ���㷨�����ĵ������������е�λ�ÿɱ�ʾΪ��
���У�g(x)=-k��(x)������ʽ������������ɵõ�Ŀ���ڵ�ǰ֡�е�����λ��y��
1.5 �㷨����
Mean Shift�㷨��һ�ָ�Ч��ģʽƥ���㷨����Ӧ����Ŀ������м������ƣ����ȣ��㷨��������������Mean Shift����������½�������Ѱ�Ź��������ٶȿ죬��Ŀ��������֪�������ȫ��������ʵʱ���٣�����ѳɹ�Ӧ���ڶԸ���ʵʱ��Ҫ��ϸߵij��ϣ���Σ����㷨��һ����Ŀ����������ֵ�ĸ��ʷֲ�Ϊ�����ĸ����㷨�����ڲ�����ͳ����������˶Ը��ٹ����еı�Ե�ڵ���Ŀ����κͱ����˶������У����нϺõ�³���ԣ����⣬��Ϊһ�������ܶȹ����㷨����������Ϊһ��ģ��ͱ���㷨���ɡ�����÷����ܵ��ܶ��о��ߵ�ϲ�����Ѿ��ɹ�Ӧ����Ŀ����������С���Mean Shift�㷨Ҳ�в���֮������Ҫ�У����ȣ�Mean Shift�����㷨�к˺������ڿ������ŷdz���Ҫ�����ã���Ϊ�����������˲���Mean Shift��������������������Ҳ��ӳ�˸��ٴ��ڵĴ�С��һ������º˺����Ĵ��ڿ����ɳ�ʼ���ٴ��ڵijߴ�������������������ٹ����в��ٷ����ı䡣Ȼ������Ŀ��������Գ߶ȱ仯ʱ�������ǵ�Ŀ��ߴ����������������˺����Ĵ��ڿ��ȷ�Χʱ���̶�����ĺ˺������ڿ��ȳ����ᵼ��Ŀ�����ʧ�ܡ���Σ����ڲ�������ֵ�ֲ�Ϊ��������ʧ��Ŀ��ļ�����Ϣ����˸��㷨ֻ�ܸ���Ŀ���ƽ�ƣ�������Ŀ�����ת��
2 �߶Ⱥ���ת����Ӧ�ĸ����㷨
2.1 �߶�����Ľ��
һ����άͼ���ڲ�ͬ�߶��µij߶ȿռ��ʾ����ͼ�����˹�˾����õ���

ʽ�У�(x��y)Ϊ�ռ����ꣻ��Ϊ�߶����ꡣG(x��y����)Ϊ�߶ȿɱ��˹������
Ϊ����Ч���ڳ߶ȿռ���ȶ��������㣬���������ڸ�˹��ֳ߶ȿռ�(DOG scale-space)�ж�ͼ����о���������DOG���Ӽ�����dz߶ȹ�һ����LOG���ӵĽ��ơ����ò�ͬ�߶ȵĸ�˹��ֺ���ͼ��������ɣ�


ͨ��ʽ(8)��ʽ(9)�ļ��㣬���Խ���ͼ���˹�������Ͳ�ָ�˹��������ͼ�����������ΪO�飬ÿ���ְ���S�㣬ʽ(9)[11]��k=21/S����0=1.6k��S=3��
Ϊ��Ѱ�ҳ߶ȿռ�ļ�ֵ�㣬ÿһ��������Ҫ�������е����ڵ�Ƚϣ������Ƿ������ͼ����ͳ߶�������ڵ�����С����ͼ1��ʾ���м�ļ������ͬ�߶ȵ�8�����ڵ���������ڳ߶ȶ�Ӧ��9��2���㹲26����Ƚϣ��������������26�����������н�Ϊ��ֵ������Ϊ��ѡ�ļ�ֵ�㡣
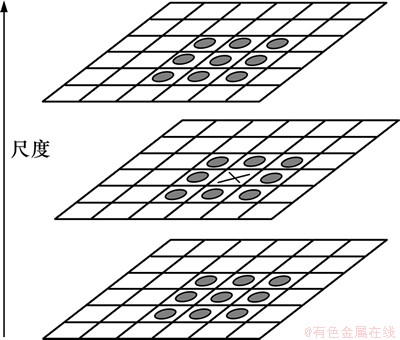
ͼ1 DOG�߶ȿռ伫ֵ����
Fig. 1 Extreme point detection in DOG scale space
������ͨ�������ά���κ����Ծ�ȷȷ���������λ�úͳ߶ȣ�ͬʱȥ���ͶԱȶȵ�������Ͳ��ȶ��ı�Ե��Ӧ��(��ΪDOG���ӻ������ǿ�ı�Ե��Ӧ)������ǿƥ���ȶ��ԡ���߿�����������
����DOG�����Ķ���Taylorչ��ʽD(X)��ֵ�õ�������λ�úͳ߶�����ľ�ȷֵ(�����ؾ���)��
ʽ�У����� ����ʾ�������������֮���λ�á��߶�ƫ�ơ���ʽ��һ����Ϊ0���ɵ������㾫ȷλ�õ�ƫ������Ϊ��
����ʾ�������������֮���λ�á��߶�ƫ�ơ���ʽ��һ����Ϊ0���ɵ������㾫ȷλ�õ�ƫ������Ϊ��

�� �ӵ�ԭ�������������X�����õ�������������ؾ�ȷ��ֵ���ơ���ʽ����ʽ�ɵã�
�ӵ�ԭ�������������X�����õ�������������ؾ�ȷ��ֵ���ơ���ʽ����ʽ�ɵã�
��|D(X)|С��ij��ֵʱ����������������ȥ��ͨ����������������������йʶ����ȶ���
��֮�������������ڳ߶ȿռ��д��Զ�λ�����������ڵ�λ�úͳ߶ȣ���ͨ������άʸ��X=( x��y����)���в�ֵ���㾫ȷ��λ�����������ڵij߶ȡ���������������ÿ�������㶼��һ���Ͼ�ȷ�ij߶ȣ���ˣ�����������ȷƥ���������ij߶���Ϣ�����Ŀ��ij߶ȱ仯�����
��ƥ��ɹ������������Ϊn�����ж�Ӧģ�������������Ϊ ��i=1��2������n�������ڵij߶�Ϊ
��i=1��2������n�������ڵij߶�Ϊ ��i=1��2������n����Ӧ��ǰ֡��Ŀ�������������Ϊ
��i=1��2������n����Ӧ��ǰ֡��Ŀ�������������Ϊ ��i=1��2������n�������ڵij߶�Ϊ
��i=1��2������n�������ڵij߶�Ϊ ��i=1��2������n������ģ��Ŀ��ij߶�Ϊs0����ǰ֡��Ŀ��ij߶�s2�ɱ�ʾΪ��
��i=1��2������n������ģ��Ŀ��ij߶�Ϊs0����ǰ֡��Ŀ��ij߶�s2�ɱ�ʾΪ��

��ƥ��ɹ��������㣬���п��ܴ�����ƥ�䣬����ƥ��������߶ȱ仯�ı�����������ȷƥ�����������ȣ���������Ƚϴ���Լ��㵱ǰ֡��Ŀ��ij߶�Ӱ��Ҳ��Ƚϴ���ˣ���Ҫȥ������������ƥ��������������Ӱ�졣���ڵ�ǰ֡��Ŀ��ij߶�����һ֡��Ŀ��ij߶�����ܴ���˿ɸ�����һ����ȥ����ƥ�䣬����һ֡ͼ����Ŀ��ij߶�Ϊs1������s��=s1/s0����

ʱ������Ϊ��ƥ���Ϊ��ƥ�䡣���У�sTΪ�߶ȱ�������ֵ����ȡֵ��������֡ͼ���Ŀ��߶ȱ仯�ij̶��йء�sTȡֵ������ﲻ��ȥ����ƥ����Ŀ�ģ�sTȡֵ��С������ܻὫ��ȷƥ�����������Ϊ��ƥ���ȥ������������sTȡ0.3��
2.2 ��ת����Ľ��
Ϊ��ʵ��ͼ��ƥ���е���ת�����ԣ���Ҫ��ÿ��������ָ��������������巽����������������Ϊ���ĵ������ڲ���������ֱ��ͼͳ���������ص��ݶȷ���������(x��y)�������ص��ݶ�m(x��y)�ͷ����(x��y)�ļ��㹫ʽ���£�



����������Ϊ���ĵ�һ������Χ�ڣ�������������ݶȷ�������һ���ݶȷ���ֱ��ͼ���ݶȷ���ֱ��ͼ�ķ�ΧΪ0��~360�㣬ֱ��ͼÿ10����Ϊһ����������36������Ȼ�������ڵ�ÿ�������㰴�ݶȷ���ȹ����ʵ����������ݶ�ģm��Ϊ����Ȩ�ء����ѡ��ֱ��ͼ������ֵ��Ϊ�������������ѡȡ��ֵ�ﵽ����ֵ80%���ϵľֲ���ֵ��Ϊ������������һ����������ܻᱻָ�����ж����������ǿƥ���³���ԡ�
Ϊ��ȷ����ת�����ԣ����������������ӵ�ʱ�����Ƚ���������ת������������������������ľ�ȷ��λʮ�ֹؼ������������Ķ�λ������ȷ����ֱ��Ӱ�������ӵ���������������Ӱ������ƥ���Ч��������[11]�У�������ֱ��ͼ�ֳ�36������ÿ10����Ϊһ���������ĸ�����һ������ȷ��������������
���У�bmΪ����������� Ϊ����ȷ��������h[c]Ϊָ��������������ֵ��h[l]��h[r]�ֱ�Ϊh[c]��ߺ��ұߵ���ֵ��
Ϊ����ȷ��������h[c]Ϊָ��������������ֵ��h[l]��h[r]�ֱ�Ϊh[c]��ߺ��ұߵ���ֵ��
����[11]�У������������ӵ�ʱ�����������Ϊ���ĵ�8��8�����ڵ�����ֵ�����˸�˹��Ȩ����(Խ������������������ݶ�ֵ�������ӵĹ���Խ��)������Ҫ��Ϊ�˽����������������λ��ȷʱ�����������Զ�ĵ�������������ӵ�Ӱ�졣���������������λ�Ƚ�ȷʱ�������������������������Ӷ���������������������������˼���������˱��IJ��ٶ���������Χ������ֵ����˹��Ȩ���㡣
����Ƶͼ�������˶�Ŀ����ٹ����У�Ϊ�˽����ת���⣬�ڵ�ǰ֡�е�Ŀ��������ȡSIFT�����㣬����Ŀ��ģ�������SIFT���������ƥ�䡣���Ŀ�������ת������ȷƥ����������������Ҳ��������ת�����Һ�Ŀ����ת�ĽǶ�һ�£���ˣ�������������������ı仯����ʾĿ�����ת�仯����ƥ����ȷ�����������Ϊn�����ж�Ӧģ�������������Ϊ��i=1��2������n����������Ϊ ��i=1��2������n����Ӧ��ǰ֡��Ŀ�������������Ϊ��i=1��2������n����������Ϊ
��i=1��2������n����Ӧ��ǰ֡��Ŀ�������������Ϊ��i=1��2������n����������Ϊ ��i=1��2������n������ģ��Ŀ��ĽǶ�Ϊ��0����ǰ֡��Ŀ��ĽǶȦ�2�ɱ�ʾΪ��
��i=1��2������n������ģ��Ŀ��ĽǶ�Ϊ��0����ǰ֡��Ŀ��ĽǶȦ�2�ɱ�ʾΪ��
��ƥ��ɹ��������㣬���п��ܴ�����ƥ�䣬����ƥ��������������ı仯��������ȷƥ�����������ȣ���������Ƚϴ���Ե�ǰ֡��Ŀ��ĽǶ�Ӱ��Ҳ��Ƚϴ���ˣ���Ҫȥ������������ƥ��������������Ӱ�졣���ڵ�ǰ֡��Ŀ��ĽǶ�����һ֡��Ŀ��ĽǶ�����ܴ���˿ɸ�����һ����ȥ����ƥ�䣬����һ֡ͼ����Ŀ��ĽǶ�Ϊ��1������ ����
����
ʱ������Ϊ��ƥ���Ϊ��ƥ�䡣���У���TΪ�ǶȲ����ֵ��������ȡ30�㡣
2.3 �㷨����
Ϊ������㷨��ʵʱ�ԣ�����ֻ�ں���Ŀ�����С�����ڼ��߶ȿռ伫ֵ�㣬�Ӷ������������㷨�ļ�������������㷨��ʵʱ�ԡ���������������������㷨�ľ��岽�����£�
(1) ��ȡ��һ֡ͼ��I0������Mean Shift�㷨ͳ��ͼ���и���Ŀ�����ɫ������ΪĿ��ģ�壬����¼Ŀ��ĽǶȦ�0�ͳ߶�s0��
(2) ��Ŀ��������SIFT�����㲢����SIFT�������� ��j=1��2������
��j=1��2������
(3) ��ȡ��һ֡ͼ��Ii��i=1��2������������һ֡ͼ����Ŀ��ĽǶȺͳ߶ȷֱ�Ϊ��1��s1(���ڵڶ�֡ͼ��1=��0��s1=s0)����ͼ�������˳���
(4) ��ͼ��Ii��ת�ǶȦ�1���õ�Ŀ��Ƕ�Ϊ���ͼ�� ��
��
(5) ��ͼ���е���s1Ϊ�߶ȵ�Ŀ����о�ֵƯ�����㣬�õ�Ŀ������IJ���������ͼ��Ii�е����ꡣ
(6) ��ͼ��Ii����Ŀ������Ϊ���ģ���ȡ����Ŀ�����С������ͼ���ڸ�ͼ���м��SIFT�����㣬����SIFT�������� ��j=1��2������
��j=1��2������
(7) ����j=1��2��������j=1��2��������ƥ�䲢ȥ����ƥ�䡣
(8) ����ƥ���������ij߶ȺͽǶȱ仯���㵱ǰ֡��Ŀ��ij߶�s2�ͽǶȦ�2�������1=��2��s1=s2ת������(3)��
3 ʵ����������
Ϊ����֤��������ĸ����㷨����Ч�ԣ���ʵ���������Ƶͼ�����н������飬�����㷨�봫ͳ�ľ�ֵƯ���㷨���бȽϡ������㷨�Ŀ�������ΪVC++6.0����������ΪPentium 4 2.8 GHz��1 G�ڴ棬ʵ�������ͼ��ɼ��ٶ�Ϊ15֡/s��
ͼ2��ʾΪ�Ľ��ľ�ֵƯ���㷨[8]�Դ��ڳ߶ȱ仯Ŀ��ĸ���ʵ���������㷨������һ֡�˺������ڿ��ȵĻ����Ϸֱ����Ӻͼ���10%�İ취��̽�ǰ֡�˺������ڵ�ʵ�ʿ��ȡ�����Bhattacharyyaϵ�������������ڽ�С�ĺ˺���������ȡ�þֲ����ֵ�������Ŀ��������Ĺ����У��˴��ڿ��Ȳ������Ա�����������С��ͼ3��ʾΪ��Ŀ����ڳ߶ȱ仯ʱ�����㷨�ĸ���ʵ��������ͼ3�ɼ�����Ľ��ľ�ֵƯ���㷨��ȣ������㷨�ܽϺõĸ���Ŀ��ij߶ȱ仯��ͼ4��ʾΪ��Ŀ�������ת�仯ʱ�Ľ��ľ�ֵƯ���㷨[15]�ĸ���ʵ������ͼ5��ʾΪ�����㷨�ĸ���ʵ��������ͼ4��ͼ5(�ر���ͼ5(e)��5(f))�ɼ����������ϸ���ʱ���뱾���㷨��ȣ��Ľ��ľ�ֵƯ���㷨����Ŀ����ת�Ƕȵľ�ȷ�����Ա�֤����ˣ���Ľ��ľ�ֵƯ���㷨��ȣ������㷨�ܽϺõظ���Ŀ�����ת�仯��
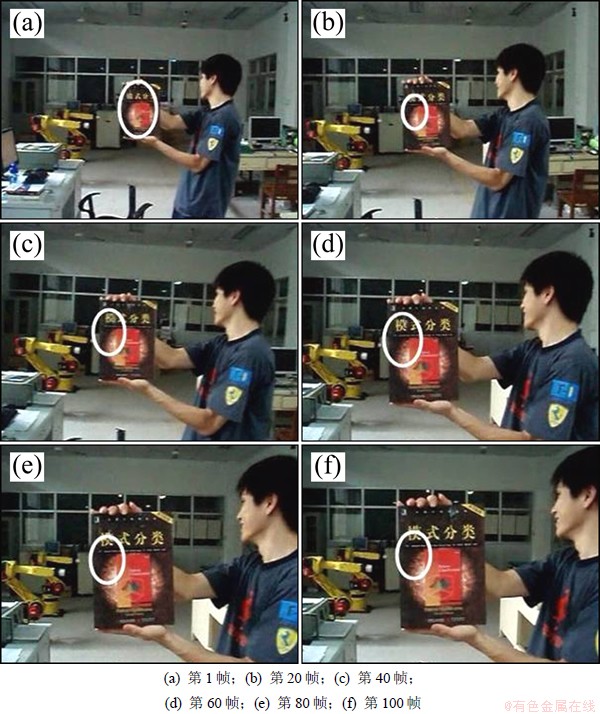
ͼ2 �Ľ��ľ�ֵƯ���㷨Ŀ��߶ȸ���ʵ��
Fig. 2 Object scale tracking experiment of improved Mean Shift algorithm
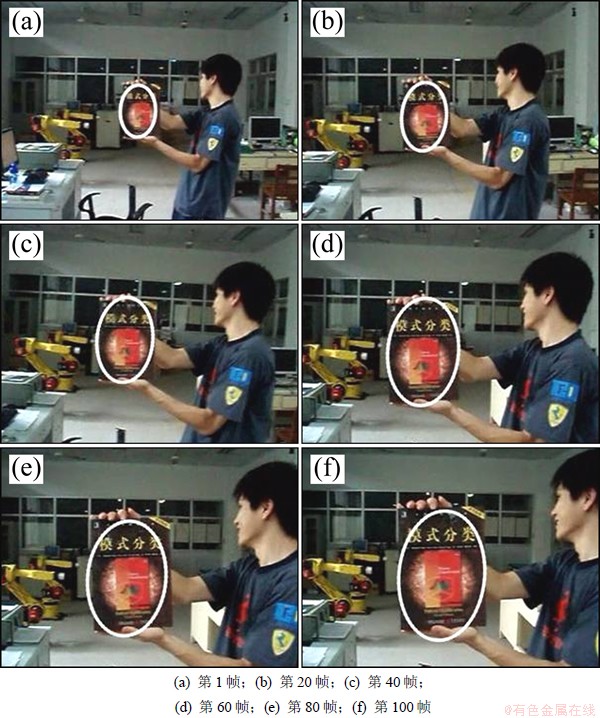
ͼ3 �����㷨Ŀ��߶ȸ���ʵ��
Fig. 3 Object scale tracking experiment of proposed algorithm
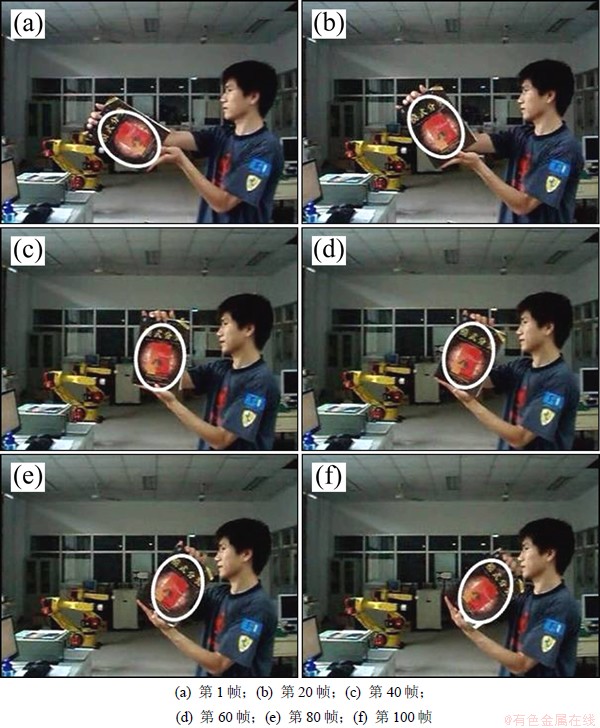
ͼ4 �Ľ��ľ�ֵƯ���㷨Ŀ����ת����ʵ��
Fig. 4 Object rotation tracking experiment of improved Mean Shift algorithm
ͼ6��ʾΪ��Ŀ�������ת�仯ʱ�Ľ��ľ�ֵƯ���㷨�뱾���㷨�ļ������Ա�ͼ����ͼ6�ɼ�����Ľ��ľ�ֵƯ���㷨��ȣ������㷨����Ч���Ŀ������еij߶Ⱥ���ת�����ͬʱ���������������ӣ���ʵ��Ӧ���п���ͨ��Ӳ������(��GPU)�Ȱ취�����
���ڱ����㷨��Ŀ��ij߶ȺͽǶ��Ǹ�����ȷƥ���SIFT�������������ģ���ˣ�����ɫ��Ҷ���Ϣ�Ϸḻ��Ŀ�����ȡ���϶�������㣬���нϺõĸ���Ч��������Ŀ�������С��ƥ������������ʱ���㷨����Ч�������ܵ�Ӱ�졣�Դˣ����ĵĽ���취�ǵ���ȷƥ�����������������3��ʱ��Ŀ��ij߶ȺͽǶȲ��ٱ仯����ȡ��һ֡�ij߶ȺͽǶȡ����⣬��Ŀ��������������������ʱ���㷨��ʵʱ�Խ����ܵ�Ӱ�죬��Ҳ�DZ����㷨�IJ���֮�����Դˣ�������һ������ֵ����Ŀ���������һ������ֵ����ƥ��ɹ������������һ��������ʱ����Ŀ����Сһ�����ȡĿ������������㣬������Ŀ��ij߶�ʱ������һ���������ɽ����㷨�ļ�����������㷨��ʵʱ�ԡ�
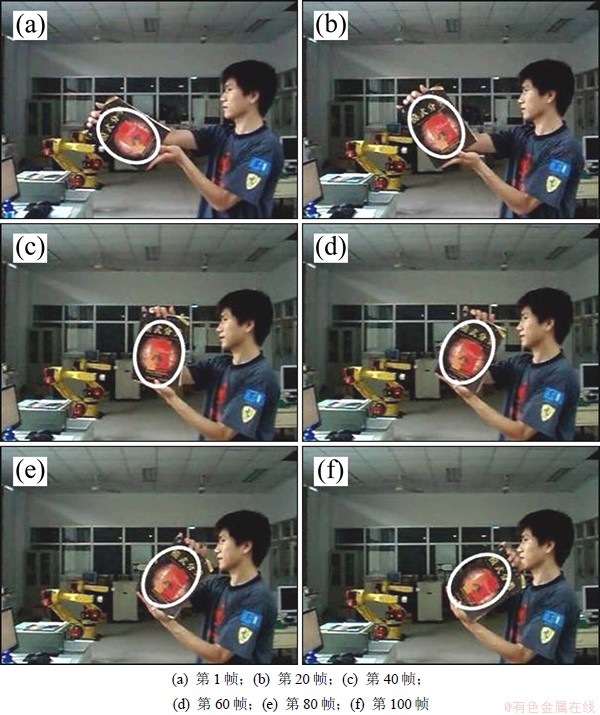
ͼ5 �����㷨Ŀ����ת����ʵ��
Fig. 5 Object rotation tracking experiment of proposed algorithm
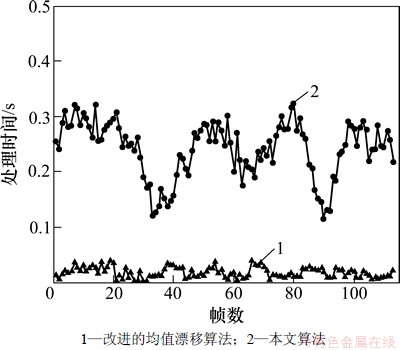
ͼ6 �㷨�������Ա�
Fig. 6 Computational complexity comparison of algorithms
����֮�⣬�����㷨�е�Ŀ��ƥ���Ǻ���ͼ�������е�Ŀ�����һ֡��ģ��Ŀ�����ƥ��ģ����ŵ����ڸ��ٹ����У�Ŀ��ij߶Ⱥ���ת�仯������һ֡���ٽ����Ӱ�죬�������Ҳ�����ۻ���ȱ���Ǹ��ٹ�����ģ��û�и��¡�
4 ����
(1) Ϊ�˽��Ŀ������еij߶Ⱥ���ת���⣬����˻��ڳ߶Ȳ��������任(SIFT)�ľ�ֵƯ��(Mean Shift)�����㷨��
(2) ���㷨��������SIFT�㷨��ȡĿ������������㲢����ƥ�䣬Ȼ���������֮֡��߶ȺͽǶȵ������ԣ�ȥ����ƥ�䣬���������ȷƥ����������еij߶ȺͽǶ���Ϣ�����㱻����Ŀ��ij߶Ⱥ���ת�Ƕȡ���������Ŀ��ĽǶȺͳ߶ȷ����仯ʱ�����㷨�Ծ��нϺõĸ���Ч�������㷨�IJ���֮���ǵ�������Ŀ������������ʱ������Ч�����ܵ�һ���̶ȵ�Ӱ�졣
�ο����ף�
[1] Abramson H, Avidan S. Tracking through scattered occlusion[C]//2011 Conference on Computer Vision and Pattern Recognition. Colorado: IEEE Computer Society, 2011: 1-8.
[2] Han Z, Ye Q, Jiao J. Combined feature evaluation for adaptive visual object tracking[J]. Computer Vision and Image Understanding, 2011, 115(1): 69-80.
[3] Comaniciu D, Ramesh V, Meer P. Real-Time Tracking of Non-Rigid Objects Using Mean Shift[C]//Proceeding of IEEE Conference on Computer Vision and Pattern Recognition. Hilton Head Island: IEEE Computer Society, 2000: 142-149.
[4] Chia Y S, Kow W Y, Khong W L, et al. Kernel-based object tracking via particle filter and mean shift algorithm[C]//2011 11th International Conference on Hybrid Intelligent Systems (HIS). Malacca: IEEE Computer Society, 2011: 522-527.
[5] Li P. An adaptive binning color model for mean shift tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2008, 18(9): 1293-1299.
[6] Khan Z H, Gu I Y, Backhouse A G. Robust visual object tracking using multi-mode anisotropic mean shift and particle filters[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2011, 21(1): 74-87.
[7] Comaniciu D, Ramesh V, Meer P. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 564-575.
[8] Liu C Y, Yung N. Scale-adaptive spatial appearance feature density approximation for object tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(1): 284-290.
[9] ������, ���ư�. ����Mean Shift��Ŀ��ƽ������ת����[J]. �й�ͼ��ͼ��ѧ��, 2007, 12(8): 1367-1371.
WANG Changjun, ZHU Shanan. Mean Shift based targets' rotation and translation tracking[J]. Journal of Image and Graphics, 2007, 12(8): 1367-1371.
[10] Drar��ni J, Roy S. A Simple oriented Mean-Shift algorithm for tracking[J]. Image Analysis and Recognition, 2007, 18(4): 558-568.
[11] Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[12] Mikolajczyk K, Schmid C. A performance evaluation of local descriptors[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(10): 1615-1630.
[13] ţ����, �µǷ�, ������. ���� SIFT �����������˲���Ŀ����ٷ���[J]. ������, 2010, 32(2): 241-247.
NIU Changfeng, CHEN Dengfeng, LIU Yushu. Tracking object based on SIFT features and particle filter[J]. Robot, 2010, 32(2): 241-247.
[14] Zhou H, Yuan Y, Shi C. Object tracking using SIFT features and Mean Shift[J]. Computer vision and image understanding, 2009, 113(3): 345-352.
[15] �־�ƽ, ������, ���ٴ�. һ�ֽ�׳��Ŀ������ɶ� Mean Shift ����ͼ������㷨[J]. �й�ͼ��ͼ��ѧ��, 2006, 11(5): 707-713.
JIA Jingping, CHAI Yanmei, ZHAO Rongchun. Robust tracking of objects in image sequences using multiple degrees of freedom Mean Shift algorithm[J]. Journal of Image and Graphics, 2006, 11(5): 707-713.
(�༭ ����ƽ)
�ո����ڣ�2012-06-11�������ڣ�2012-09-26
������Ŀ��������Ȼ��ѧ����������Ŀ(61203375��61203083��51175261)�����ϴ�ѧ��ʿ����������Ŀ(XBS1241)
ͨ�����ߣ����վ�(1981-)���У�ɽ�������ˣ���ʿ�����»����Ӿ����о����绰��15215315698��E-mail��cse_zhaoqj@ujn.edu.cn
ժҪ��Ϊ�˽��Ŀ������еij߶Ⱥ���ת���⣬���һ�ֻ��ڳ߶Ȳ��������任(SIFT)�;�ֵƯ�Ƶ�Ŀ������㷨�����㷨���ȼ��ģ�������Ŀ�������ڳ߶ȿռ��еļ�ֵ�㣬Ȼ��ͨ�������ά���κ�����ȷ��λ�������λ�úͳ߶ȣ����Ŷ�Ŀ�������ģ����������������ƥ�䣬����������֮֡��߶ȺͽǶȵ������ԣ�ȥ����ƥ�䣬���������ȷƥ����������еij߶ȺͽǶ���Ϣ�����㱻����Ŀ��ij߶Ⱥ���ת�Ƕȡ��о������������������Ŀ��ĽǶȺͳ߶ȷ����仯ʱ�����㷨�Ծ��нϺõĸ���Ч����
