
�ں�Kalman�˲�������Ӧ����Mean Shift�㷨
����诣���������
(���������̴�ѧ �Զ���ѧԺ�������� ��������150001)
ժ Ҫ��
Shift�㷨�ڸ��ӱ����д�����ɫ��������ͺ˺��������̶���ȱ�ݣ����һ���ں�Kalman�˲�������Ӧ����Mean Shift�����㷨����Mean Shift�㷨�õ���Ŀ��λ����ΪKalman�˲��IJ���ֵ������Kalman�˲�Ԥ�����һ֡Ŀ���λ�ã���Ԥ��ֵ��ΪMean Shift�㷨��������ij�ʼֵ�����Է���任������Ŀ��ߴ�仯������������֡��ƥ�䴰�ڵ�������ϵ��ȷ������ƥ�䴰������Ŀ�ꡣ�����������������㷨�ڱ�����Ŀ����ɫ�����Ŀ��ߴ�仯�ȸ�������¶��ܶ�Ŀ�����ȷ���٣����н�ǿ�Ŀ�����������
�ؼ��ʣ�
Ŀ�������Mean Shift�㷨��Kalman�˲���
��ͼ����ţ�TP391.4 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0784-05
Tracking algorithm based on Kalman and Mean Shift with adaptive bandwidth
FU Hui-xuan, WANG Yu-chao, SUN Feng
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Abstract: According to the defects that Mean Shift algorithm exists color interference in a complex background and kernel function bandwidth of Mean Shift was not changeable, integrated Kalman filter to adaptive bandwidth Mean Shift Tracking algorithm was proposed. Taking object position obtained from Mean Shift as Kalman filter measure value, Kalman filter is used to get the predicted starting position of Mean Shift in every frame. The object size change by the affine transformation is described, and the window is matched using continuous two frames in the maximum correlation coefficient to determine the optimal matching window search object. The tracking experiment shows that the algorithm in the complex situation, such as background and the object having similar color and the object size changing, can carry on the accurate tracking to the object, showing a good anti-interference ability.
Key words: object tracking; Mean Shift algorithm; Kalman filter
Ŀ������Ǽ�����Ӿ���һ����Ҫ��֧������Ƶ��ء�����ʶ���Ӧ�������У�������Ҫ�ڸ��ָ��ӵĻ����¶��˶����������Ч���١�����ϵͳ����Ҫ���ܹ�ʵʱ��ӦĿ��������˶����µ���۱仯������Ҫ��Գ����д��ڵĸ��ӱ�����Ŀ��ߴ�仯�����ص�Ӱ�첻���С�Mean Shift��һ�ֻ����ܶ��ݶȵ��������Ʒ�������1975����Fukunaga��[1]�����1995��Cheng[2] �������뵽������Ӿ�����ֱ������������������ѧ�ߵĹ㷺��ע����������Mean Shift�㷨[3-4]�����������������ģʽƥ����ŵ㱻�㷺Ӧ�õ�Ŀ���������[5-8]��Mean Shift�����㷨�ڼ����������ܹ�ȡ�ýϺõĸ���Ч���������ڸ��ӱ����У����ڸ��㷨���˶����岻���κ�Ԥ�⣬���ܽ�������������ɫ�������⣬�����¸���ʧ�ܣ����������������Ԥ��Ŀ���˶��������������˲���������������ѧ��Kalman��Bucy��1960�������һ�����ŵ����˲����������м�����С����ʵʱ������ص㡣��ˣ���Mean Shift�㷨��Kalman�˲������Ԥ��Ŀ��λ�ã���ǿ�����㷨�Ŀ�����������Mean Shift���������ڴ�����ȴû����������Ӧ���������������ٴ��ڵĴ�С��ͨ���˴����ɳ�ʼ���ٴ��ڵijߴ��������Ŀ��ߴ粻����Сʱ�����ٴ����ڴ��ڴ����ı���������������Ӱ��Ŀ��ĸ��ٵ㡢��Ŀ��ߴ����������������˴�����Χ��ʱ�̶�����ĺ˴��������ᵼ��Ŀ��Ķ�ʧ��
���������ڷ�����ͳMean Shift�㷨�����ԵĻ����ϣ����Kalman�˲������һ���ں�Kalman�˲�������Ӧ����Mean Shift�㷨������Mean Shift�㷨������ٴ��ڵ�λ�úʹ�С�����Ѵ��ڵ�����λ����ΪKalman�˲��IJ���ֵ��У��Ŀ�������λ�ã�Ȼ���Ա����������㱾֡Ŀ��ijߴ磬 ͨ���������ϵ��ȷ������ƥ�䴰�ڣ�������µĺ˺���������Kalman�˲�����Ԥ��������������һ֡ͼ���������ڵ�����λ�á����������������㷨������Ч���������ɫ���ż�Ŀ��ȷ��λ���⣬�������õ�³���ԡ�
1 Mean Shift�����㷨
Mean Shift��һ�ַDz������ܶȹ����㷨������ʼ֡��Ϊ������Ŀ�꽨��ֱ��ͼ�ֲ�����ͬ���ķ��������N֡��Ӧ��ֱ��ͼ�ֲ�����2���ֲ������������Ϊԭ��
1.1 Ŀ����������Ȩ��ģ
����ģ���и������ص�Ϊ![]() ��ģ��������
��ģ��������![]() �����庯��
�����庯��![]() ����
����![]() ������ֵ
������ֵ![]() ��2άʵ����������
��2άʵ����������![]() ���Ӧ��ģ��İ뾶��
���Ӧ��ģ��İ뾶��![]() ��
��
![]() ��ʾģ���ϸ������ص㵽ģ���ĵĹ�һ����
��ʾģ���ϸ������ص㵽ģ���ĵĹ�һ����
�롣k(x)Ϊ�˺�������[x]����ɢ����������� x=0ʱ����ֵΪ1��������ֵΪ0���ɴ˿��Եõ����¼���ģ��ֱ��ͼ�Ĺ�ʽ(��ֱ��ͼ������ֵΪu����Ϊ��������![]() Ϊ
Ϊ![]() �Ĺ�һ��ϵ����ʹ����֮��Ϊ1)��
�Ĺ�һ��ϵ����ʹ����֮��Ϊ1)��
![]() (1)
(1)
ʽ�У�
 ��
��
![]() ��
��
1.2 ��ѡ��������Ȩ��ģ
ͬ��������ƥ������и������ص�Ϊ{xi}i-1, ��, m�������������y������İ뾶��h����������ֱ��ͼ�Ĺ�ʽΪ(��ֱ��ͼ������ֵΪu����Ϊ��������CΪpu(y)�Ĺ�һ��ϵ����ʹ����֮��Ϊ1)��
![]() (2)
(2)
ʽ�У�
 ��
��
![]() ��
��
1.3 Ŀ�����ѡ��������ƶ�
���ƶȲ���Bhattacharyyaϵ������������Ϊ��
![]() (3)
(3)
�ɼ���![]() ��
��![]() �ֲ�Խ�ӽ�����(y)Խ�����ڹ�һ������
�ֲ�Խ�ӽ�����(y)Խ�����ڹ�һ������![]() ��
��![]() �ֲ���ȫ��ͬʱ����(y)ȡ�����ֵ1������(y)������0��1֮�䡣
�ֲ���ȫ��ͬʱ����(y)ȡ�����ֵ1������(y)������0��1֮�䡣
1.4 Ŀ��λ������
Ϊʹ��(y)�ﵽ����ڵ�ǰ֡�У���Ŀ������һ֡�е�λ��y0 (Ŀ�����������λ��)��ΪĿ���ڵ�ǰ֡�еij�ʼλ�ã�Ȼ����y0������Ѱ������Ŀ��λ��y1��ʹ�æ�(y1)���ʽ(3)��p(y0)������̩��չ������ȥ�߽���������Ժ����ɽ���Ϊ��
![]() (4)
(4)
ʽ�У�![]() ��
��
����ʽ(4)�еĵ�1����y�أ�Ϊ��ʹ�����ó������Ľӽ�ʵ�ʵ�Ŀ�����ģ�ʽ(4)�еĵ�2�����Ҫȡ���ֵ��ͨ��Mean Shift��������ʹ��������ҵ���������ġ����ĵ�����ʽ���£�
 (5)
(5)
����Ŀ��ģ���ǽ�������ɫֱ��ͼ�Ļ����ϣ���ֱ��ͼ��һ�ֱȽ����Ķ�Ŀ����������������������Ŀ�����ɫ�ֲ�������ʱ����Ŀ����Χ������Ŀ����ɫ�������������ʱ���㷨��ʧĿ�ꡣ�˴����ɳ�ʼ���ٴ��ڵijߴ��������Ŀ��������Գ߶ȱ仯ʱ���̶�����ĺ˴������ᵼ��Ŀ��Ķ�ʧ��Ŀ�궨λ��ȷ��
2 �ں�Kalman�˲�������Ӧ����Mean Shift�㷨
2.1 ����Kalman��Mean Shift�����㷨
��Kalman�˲�Ԥ�⼼�����뵽Mean Shift�㷨�У���߸��ٷ����Ŀ������������ڸ��ٹ����У���������2֡ͼ��ʱ�����϶̣�Ŀ���˶�״̬�仯��С���ɽ�����ΪĿ����2֡ͼ���ʱ�������������˶������ԣ����õ��ٶ��˶�ģ�ͣ���Kalman�˲���Ԥ��Ŀ������λ�á�
��һ����ɢʱ������ϵͳ��״̬���̺۲�ģ�ͷֱ�Ϊ��
![]() (6)
(6)
![]() (7)
(7)
ʽ�У�XkΪkʱ�̵�״̬ʸ����AΪ��k-1ʱ�̵�kʱ�̵�״̬ת�ƾ���ZkΪkʱ�̵IJ���ֵ��H�Dz�������Wk��Vk�ֱ��ʾ���̺Ͳ�����������
����״̬����![]() ���۲�״̬����
���۲�״̬����![]() ��Ԥ��״̬����
��Ԥ��״̬����![]() �����У�
�����У�![]() �ֱ��ʾĿ��������x���y���ϵ�λ�ú��ٶȣ�
�ֱ��ʾĿ��������x���y���ϵ�λ�ú��ٶȣ�![]() �ֱ��ʾKalman�˲���Ԥ���Ŀ������λ�ú��ٶȡ�����ʽ(6)��(7)��״̬ת�ƾ���A�۲����H��
�ֱ��ʾKalman�˲���Ԥ���Ŀ������λ�ú��ٶȡ�����ʽ(6)��(7)��״̬ת�ƾ���A�۲����H��
 ��
��![]() (8)
(8)
ʽ�У�T��ʱ��tk��ʱ��tk-1��ʱ������
Kalman�˲���ΪԤ���У��2���Σ����ȣ���ʼ�����������������Q�����������������R����ʼ״̬����X0�ͳ�ʼ�������P0��Ȼ����Ԥ��״̬����X'k�е�x'k��y'k�����趨Mean Shift�㷨�������ڵ�����λ�ã�����Mean Shift�㷨���������λ����Ϊ����ֵZk��У��Ԥ��״̬����X'k���õ�Kalman�˲�����Ԥ����X'k+1������������һ֡ͼ���������ڵ�����λ�á�
2.2 ����Ӧ����Mean Shift�㷨
��һ֡ͼ���У���N�����ص��ʾĿ��(x1��x2������xn)������һ֡�ж�Ӧ���ص�����Ϊ(x��1��x��2������x��n)����2֡��Ŀ���������ص������������任��ϵ[9]��
![]() ,
,
1��i��n (9)
ʽ�У�k���Ⱥ�b�ֱ��ʾĿ��ı������š���ת��ƽ�Ʋ�����
����2֡��Ŀ��ı����仯һ�㲢�������ǰһ֡���豾֡��Ŀ��ߴ���ܵ����ŷ�ΧkΪ(-1.5,1.5)����![]() ��k0=0.05��i=0��1������10���������ÿ��ki��ƥ�䴰�ڣ�������Щƥ�䴰�ںͳ�ʼ֡��Ŀ�괰�ڵ����ϵ�������ϵ������Ϊ��֡���ŵ�k�䡣
��k0=0.05��i=0��1������10���������ÿ��ki��ƥ�䴰�ڣ�������Щƥ�䴰�ںͳ�ʼ֡��Ŀ�괰�ڵ����ϵ�������ϵ������Ϊ��֡���ŵ�k�䡣
2.3 �㷨����
�����㷨�������£�
(1) ��ʼѡ������Ŀ�꣬Kalman������ʼ��������ʽ(1)����Ŀ�������ֱ��ͼqu��
(2) ��ȡ��һ֡ͼ��Ԥ�ǰ֡����Pk/k-1��Ŀ��״̬Xk/k-1������Ԥ��λ��Ϊy0��
(3) ��Ԥ��Ŀ��λ��y0��������Mean Shift�㷨�õ���Ŀ�괰�ڵ�����λ����ΪKalman�˲��IJ���ֵZk��
(4) ����Kalman����Ŀ��״̬Xk/k��������Pk/k��Xk/k��Ϊ��ǰ֡Ŀ�괰������λ�ã�
(5) �豾֡��Ŀ��ߴ���ܵ����ŷ�ΧkΪ(-1.5��1.5)����![]() ��k=0.05��i=0��1������10���������ÿ��ki��ƥ�䴰�ڣ�������Щƥ�䴰�ںͳ�ʼ֡��Ŀ�괰�ڵ����ϵ�������ϵ������Ϊ��֡���ŵ�k�䣻
��k=0.05��i=0��1������10���������ÿ��ki��ƥ�䴰�ڣ�������Щƥ�䴰�ںͳ�ʼ֡��Ŀ�괰�ڵ����ϵ�������ϵ������Ϊ��֡���ŵ�k�䣻
(6) ����k������µ�Ŀ��ƥ�䴰�ں˺������������ز���(2)��ʼ��һ֡�ļ��㡣
�㷨�Ľṹ��ͼ1��ʾ��
3 ������
�����У��ɼ�ͼ��ֱ���Ϊ768��576�IJ�ɫͼ�����鳡��ͼ��550֡����̹�˸��٣��ֱ�ѡȡ53֡��76֡��115֡��121֡��334֡��408֡��436֡��442֡�ĸ���Ч����ͼ2��ʾΪ����Mean Shift�����㷨���õ��ĸ��ٽ����
��ͼ2�ɿ���������������Ŀ����ɫ����ĸ���ʱ���㷨��������Ŀ��������ɫ����ı����ϣ�����ȷ����Ŀ�ꡣ��Ŀ��ߴ緢���仯ʱ������������Ŀ��ߴ���仯������ȷ��λĿ�ꡣ
ͼ3��ʾΪ�����ں�Kalman�˲�������Ӧ����Mean Shift�㷨��ͬһ��Ƶ�������õ��ĸ��ٽ����
��ͼ3�ɿ�������̹���˶������Ӹ���ʱ������̹���뱳���е�������ɫ���ʷֲ����������Mean Shift���������������ϣ�������Kalman �˲�����Mean Shift�㷨��Ԥ���һʱ�̵�Ŀ��λ�ã�������Ч���ⱳ����ɫ�ĸ������⣬�ɹ�ʵ����Ŀ����١�����53֡����76֡����115֡����121֡Ŀ�귢���ߴ��С����334֡����408֡����436֡����442֡��Ŀ��ߴ���ʱ�����ٴ��ڶ�������Ŀ��ߴ�ı仯��ȷ��λĿ�ꡣ
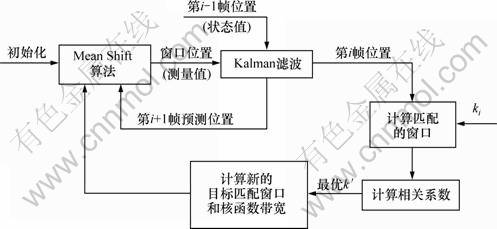
ͼ1 �㷨�ṹͼ
Fig.1 Algorithm structure
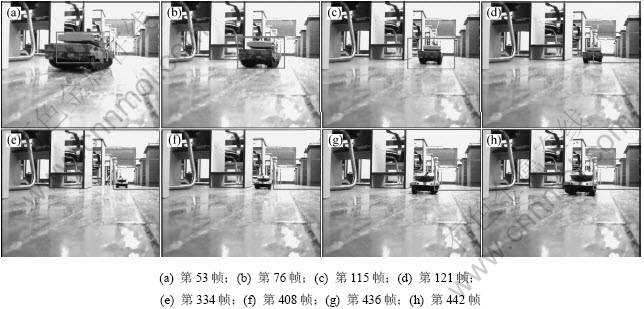
ͼ2 Mean Shift�㷨�ĸ��ٽ��
Fig.2 Tracking results by Mean Shift algorithm
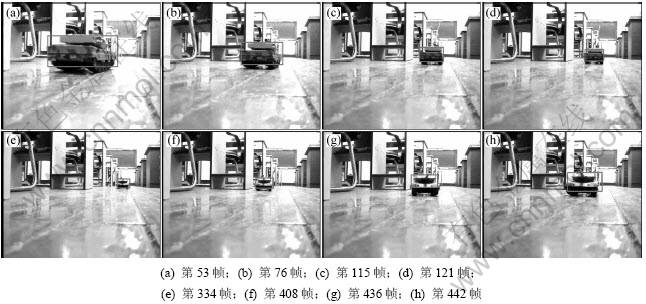
ͼ3 �ں�Kalman�˲�������Ӧ����Mean Shift�㷨�ĸ��ٽ��
Fig.3 Tracking results by Kalman and Mean Shift with adaptive bandwidth algorithm
4 ����
���Mean Shift�㷨�ڸ��ӱ���������ʧĿ�������ͺ˺��������̶���ȱ�ݣ���Kalman�˲�Ԥ�����뵽Mean Shift�����㷨�С����ȣ�ȷ����ʼ���������ڵ�λ�úʹ�С����ȷ��ͼ�����е�״̬ģ�ͺͲ���ģ�ͣ�Ȼ����Kalman�˲�Ԥ�����һ֡Ŀ���λ�ã���Ԥ��ֵ��ΪMean Shift�㷨�е�������ij�ʼֵ������˸��ٷ����Ŀ������������ٶȡ����Է���任������Ŀ��ߴ�ı仯������������֡��ƥ�䴰�ڵ�������ϵ��ȷ������ƥ�䴰������Ŀ�ꡣ��������������㷨�ڱ�����Ŀ����ɫ����ͳ߶����ŵȸ�������¶��ܶ�Ŀ�����ȷ���٣����н�ǿ�Ŀ�����������
�ο����ף�
[1] Fukunaga K, Hostetler L. The estimation of the gradient of a density function with application in pattern recognition[J]. IEEE Trans Information Theory, 1975, 21(1): 32-40.
[2] Cheng Y. Mean Shift, mode seeking, and clustering[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995, 17(8): 790-799.
[3] Comaniciu D, Ramesh C. Mean Shift and optima1 prediction for efficient object tracking[C]//International Conference on Image Processing. Vancouver: ICIP, 2000, 3: 70-73.
[4] Comaniciu D, Ramesh V, Meer P. Real-time tracking of non-rigid objects using Mean Shift[C]//IEEE Conference on Computer Vision and Pattern Recognition. Hilton Head Island: CVPR, 2000: 142-149.
[5] Comaniciu D, Ramesh V, Meer P. Kernel-based object tracking[J]. IEEE Trans on Pattern Analysis and Machine Intelligence, 2003, 25(5): 564-575.
[6] Comaniciu D, Meer P. Mean Shift: A robust application toward feature space analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5): 603-619.
[7] Yilmaz A, Shafique K, Shah M. Target tracking in airborne forward looking infrared imagery[J]. Image and Vision Computing, 2003, 21(7): 623-635.
[8] Collins R T. Mean Shift blob tracking through scale space[C]// IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Madison: CVPR, 2003: 234-240.
[9] ��ʤ��, ���ư�. �˺�����������Ӧ��Mean shiftĿ������㷨[J]. ��繤��, 2006, 33(8): 11-16.
ZHU Sheng-li, ZHU Shan-an. Algorithm of target tracking based on Mean Shift with adaptive bandwidth of kernel function[J]. Opto-Electronic Engineering, 2006, 33(8): 11-16.
(�༭ �)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(60704004)�������У��������ר����Ŀ(HEUCFR1009)
ͨ�����ߣ������(1981-)��Ů��������ĵ�����ˣ���ʿ����ʦ�����»����Ӿ���⼼����ģʽʶ����о����绰��0451-82588958��E-mail��fuhuixuan@hrbeu.edu.cn
ժҪ�����Mean Shift�㷨�ڸ��ӱ����д�����ɫ��������ͺ˺��������̶���ȱ�ݣ����һ���ں�Kalman�˲�������Ӧ����Mean Shift�����㷨����Mean Shift�㷨�õ���Ŀ��λ����ΪKalman�˲��IJ���ֵ������Kalman�˲�Ԥ�����һ֡Ŀ���λ�ã���Ԥ��ֵ��ΪMean Shift�㷨��������ij�ʼֵ�����Է���任������Ŀ��ߴ�仯������������֡��ƥ�䴰�ڵ�������ϵ��ȷ������ƥ�䴰������Ŀ�ꡣ�����������������㷨�ڱ�����Ŀ����ɫ�����Ŀ��ߴ�仯�ȸ�������¶��ܶ�Ŀ�����ȷ���٣����н�ǿ�Ŀ�����������
