
DOI: 10.11817/j.issn.1672-7207.2019.03.009
˫�������˻����������Կ��ſ���
����1������ǿ1�����˻�2��������1��������1
(1. �Ͽ���ѧ ���������ƹ���ѧԺ�����300350��
2. ����е�Ӧ�ü�����ѧ�����300350)
ժ Ҫ��
������(LADRC)�ʹ��������Կ��ſ���������ɽṹ���������Ը�����������������״̬�۲����Լ������������ɣ������������ֵĵ����㷨��Ϊ�˽������ʽ˫�������˻���̬����ϵͳ��Ƿ�������������ǿ��ϵĿ������⣬��ƴ��������Կ��ſ��������о��������������ƵĴ��������Կ��ſ����������٣����ڲ����������ܹ�������ƾ��ȼ������Ե�Ҫ���Ҿ��н�ǿ��³���ԡ��������������Լ��Է�����ǿ���ϵͳ�Ľ���������
�ؼ��ʣ�
�����Կ��ſ�������������������������״̬�۲�����˫�������˻�����̬������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2019)03-0564-08
Attitude control of tandem rotor UAV based on cascade linear active disturbance rejection control
ZHANG Yong1, CHEN Zengqiang1, ZHANG Xinghui2, SUN Qinglin1, SUN Mingwei1
(1. School of Computer and Control Engineering, Nankai University, Tianjin 300350, China;
2. Tianjin Sino-German University of Applied Sciences, Tianjin 300350, China)
Abstract: The structures of the linear active disturbance rejection controller(LADRC) and cascade linear active disturbance rejection controller were described in detail, including linear tracking differentiator, linear extended state observer and linear error control law. And the typical algorithms of the each part were given as well. In order to solve the control problems of under-actuated, multivariable and strong coupling in tandem rotor UAV attitude control system, the cascade linear active disturbance rejection controller was designed. The results show that the cascade LADRC has fewer parameters and is convenient for parameter setting, it can meet the requirement of control accuracy and rapidity, and it also has strong robustness, anti-disturbance ability and decoupling ability.
Key words: linear active disturbance rejection controller(LADRC); cascade control; linear extended state observer; tandem rotor UAV; attitude control
PID���ƾ��ǿ�Ŀ����ʵ�����֮���������������������Ŀ��Ʋ��ԣ������ǿ�������������ģ�����������Ʋ��ԡ���ˣ�ֻҪѡ���PID����ʹ�ջ��ȶ�������ʹһ�����ﵽ��ָ̬�ꡣĿǰ��PID�������ں�����ơ��˶������Լ��������̿���Ӧ���У���Ȼռ����������λ��Ȼ������ѧ�����ķ�չ�Կ��ƾ��Ⱥ��ٶȵ�Ҫ���Լ��Ի����仯����Ӧ������Ҫ��Խ��Խ�ߣ�����PID������¶������ȱ�㡣Ϊ�˱���PID���Ƶ��ŵ㣬�˷�����ȱ�㣬HAN��[1]��20����80����о�����һ�ֿ��Ʋ��ԡ��Կ��ſ��Ƽ�����(active disturbance rejection control technique)���Կ��ſ�������ͻ�����ص���ǰ������ڱ��ض�������в�ȷ�������Լ��ⲿ�Ŷ������Ϊδ֪�Ŷ���Ȼ���ö�������롢����������й��Ʋ����貹�����Կ��ſ�����������Ӧ�ٶȿ졢���ƾ��ȸߡ�����������ǿ���ص㣬��ˣ������������о����������ʵ���еõ��˹㷺Ӧ�á�����HAN��[1]���Կ��ſ������Ƿ����Եģ����¿������IJ����ڶ࣬ʹ�㷨ʵ�ֺͲ������ڱ�ø��ӡ�GAO��[2]���һ�������Կ��ſ����������ֿ����������٣����ڲ������ں��㷨ʵ�֡�����ʽ˫�������˻����ص��Ǿ���ǰ����2���������뵥�������˻���ȣ�������������ǿ������Ч�ʸߵ��ŵ㣬�����ʺ�����ֱ�����Ĺ���[3]�����ǣ���������ʽ˫�������˻���������ǰ�����õģ���������һϵ�еĿ�������ѧ�����ж���ѧ�ͽṹ����ѧ���⣬��Щ����Զ�ȵ��������˻��ĸ��ӣ���Ӧ�ķ�������Ƽ����Ѷ�Ҳ�ȵ��������˻��Ĵ�����ʽ˫�������˻���һ������6�����ɶȺ�2�����������Ƿ����ϵͳ�����ж������ǿ��ϡ������ԺͶ��Ŷ����е����ԣ����������п��ƵĹؼ�������̬���ƣ�Ŀǰ����صĿ��Ʒ�����ģ��������PID����[4]��³������[5]������Ⱥ�Ż����������[6]��������ٿ���[7]������Ӧ��ģ������[8]����ģ����[9]�������������[10-11]�ȡ����������������ʽ˫�������˻���̬����ϵͳ��Ƿ�������������ǿ��ϵĿ������⣬��ƴ��������Կ��ſ���������Ч�ؽ�������Ͽ������⣬�����������������õ����õĿ���Ч����
1 �����Կ��ſ������Ļ���ԭ��
�����Կ��ſ�����(LADRC)�����Ը�����������������״̬�۲�����������������3������ɣ���ͼ1��ʾ��ͼ1�У����߿���Ϊ�����Կ��ſ�������  Ϊ�۲�����ϵͳ״̬�Ĺ���ֵ��
Ϊ�۲�����ϵͳ״̬�Ĺ���ֵ�� Ϊ������������wΪϵͳ�ⲿ�Ŷ�������yΪϵͳ���������uΪϵͳ�������������
Ϊ������������wΪϵͳ�ⲿ�Ŷ�������yΪϵͳ���������uΪϵͳ�������������
1.1 ���Ը�������(LTD)
��Ƹ���������Ŀ���Ǹ�ϵͳ���밲�Ź��ɹ��̣��õ��⻬�������źţ�����ϵͳ��ʼ��
�Զ���ϵͳΪ����������ʽ�����Ը��������㷨Ϊ
 (1)
(1)
ʽ�У�vΪ���������������źű�����v1Ϊv�ĸ����źű�����v2Ϊ��������źű�����rΪ���������ٶȵIJ�����
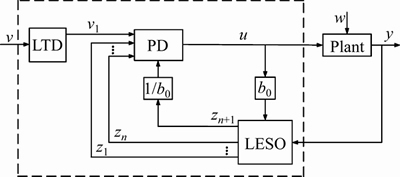
ͼ1 �����Կ��ſ�����
Fig. 1 Linear of ADRC
1.2 ��������״̬�۲���(LESO)
����״̬�۲�����ϵͳ������״̬�⣬����ϵͳģ�������IJ�ȷ���Ժ�ϵͳ�ⲿ�Ŷ���Ϊ���Ŷ������ų���һ��״̬��ͨ���۲����������Ŷ������ӵ��������н��в�������������ʹԭ���ķ����Կ���ϵͳ������ԵĻ�������������ϵͳ��������̬���Ʋ������Ŷ��ļ����������Կ��ſ��Ƽ���������ļ�����
������ʽ����������״̬�۲����㷨Ϊ
 (2)
(2)
ʽ�У�Ϊ�۲�����ϵͳ״̬�Ĺ���ֵ�� Ϊ�۲���������Ϊ������������
Ϊ�۲���������Ϊ������������ Ϊϵͳ�����
Ϊϵͳ�����
Ϊ�˽�LESO�IJ������� ����ʾ����LESO�ļ���ȫ��������
����ʾ����LESO�ļ���ȫ�������� ������������ʽ��ʾ��
������������ʽ��ʾ��
 (3)
(3)
ʽ�У�sΪ��������������LESO��ֻʣ��������������ڲ���������
1.3 ������������
��LESO���ж�̬����֮��ϵͳ��ɻ�������������ϵͳ����ˣ�ֻ����ý�Ϊ������PD�����ɾͿ��Դﵽ����Ŀ�ģ��������������㷨Ϊ
 (4)
(4)
ʽ�У� Ϊ������������
Ϊ������������ Ϊ�����������ɡ�ʽ(4)��ֻ�õ��������źű���r����û���漰�����źű���r�ĸ������źţ���������Ŀ���DZ���ջ����ݺ���������㣬���ڶ�ϵͳ���п��ơ�
Ϊ�����������ɡ�ʽ(4)��ֻ�õ��������źű���r����û���漰�����źű���r�ĸ������źţ���������Ŀ���DZ���ջ����ݺ���������㣬���ڶ�ϵͳ���п��ơ�
Ϊ�˽��������IJ������� ����ʾ����ϵͳ�ջ���������ʽ�ĸ�ȫ��������
����ʾ����ϵͳ�ջ���������ʽ�ĸ�ȫ�������� ������
������
 (5)
(5)
������ʾ֮�������IJ�����ֻʣ�������ڶԿ������IJ�������������
2 ���������Կ��ſ����������
2.1 ����n�����������Կ��ſ����������
����n�������Ķ��ױ��ض���
 (6)
(6)
ʽ�У� ��
�� ������
������ Ϊϵͳ�е�δ֪�Ŷ�������Ŀ������x1���������趨�õ������켣������ʵ������u����xn��xn����xn-1��ֱ��x2����x1�ﵽ����Ŀ��Ϊֹ����x2Ϊ���������u1��x3Ϊ���������u2���Դ����ƣ�xnΪ���������un-1�����Կ��ſ�������ȷ����x1����Ŀ��v(t)�Ŀ�����u1��Ȼ����u1Ϊ�����켣����ʽ(6)�е�2ʽ���Կ��ſ�������ȷ����״̬x2����u1�Ŀ�����u2��ֱ��ȷ������ʵ������uΪֹ������������˼�룬����n�����������Կ��ſ������ṹͼ��ͼ2��ʾ��
Ϊϵͳ�е�δ֪�Ŷ�������Ŀ������x1���������趨�õ������켣������ʵ������u����xn��xn����xn-1��ֱ��x2����x1�ﵽ����Ŀ��Ϊֹ����x2Ϊ���������u1��x3Ϊ���������u2���Դ����ƣ�xnΪ���������un-1�����Կ��ſ�������ȷ����x1����Ŀ��v(t)�Ŀ�����u1��Ȼ����u1Ϊ�����켣����ʽ(6)�е�2ʽ���Կ��ſ�������ȷ����״̬x2����u1�Ŀ�����u2��ֱ��ȷ������ʵ������uΪֹ������������˼�룬����n�����������Կ��ſ������ṹͼ��ͼ2��ʾ��

ͼ2 ����n�����������Կ��ſ������ṹͼ
Fig. 2 Structural diagram of the second order n level cascade LADRC
��ʽ(6)չ������
 (7)
(7)
ʽ�У� ��
�� ������
������ ������ϵͳ�ľ�������㷨Ϊ
������ϵͳ�ľ�������㷨Ϊ
 (8)
(8)
ʽ�У� ��
�� Ϊϵͳ״̬�Ĺ���ֵ��
Ϊϵͳ״̬�Ĺ���ֵ�� Ϊϵͳ�Ŷ��۲�ֵ��
Ϊϵͳ�Ŷ��۲�ֵ�� Ϊϵͳ��
Ϊϵͳ�� Ϊ������������
������������ ������������
������������
2.2 ����2�����������Կ��ſ���������������
����2�������Ķ��ױ��ض�������ʽ��ʾ��
 (9)
(9)
 (10)
(10)
 (11)
(11)
ʽ�У�xa��xb�ֱ�Ϊʽ(9)��ʽ(10)��״̬�������Ŷ� 5sin(0.5t)��
5sin(0.5t)�� 10sign(cos(0.6t))����ʽ(9)~ (11)��֪��Ҫ�ֱ��ʽ(9)��ʽ(10)���LADRC������ʵ������u����xb������xb����xa��ʹxa�ܹ������趨�õ������켣��ÿ��LADRC���Ƕ��ġ�����������ϵͳ��д�ɱ�״̬���̵���ʽ����
10sign(cos(0.6t))����ʽ(9)~ (11)��֪��Ҫ�ֱ��ʽ(9)��ʽ(10)���LADRC������ʵ������u����xb������xb����xa��ʹxa�ܹ������趨�õ������켣��ÿ��LADRC���Ƕ��ġ�����������ϵͳ��д�ɱ�״̬���̵���ʽ����
 (12)
(12)
ʽ�У� ��
�� ����x3Ϊ���������u1������LADRC1�����㷨Ϊ
����x3Ϊ���������u1������LADRC1�����㷨Ϊ
 (13)
(13)
�õ����������u1���Դ���Ϊx3�������켣������LADRC2�Ŀ����㷨Ϊ
 (14)
(14)
������LADRC1�Ͷ���LADRC2������������2�������Ķ��ױ��ض���Ĵ����Կ��ſ���������ṹͼ��ͼ3��ʾ��

ͼ3 ����2�����������Կ��ſ������ṹͼ
Fig. 3 Structural diagram of the second order second level cascade LADRC
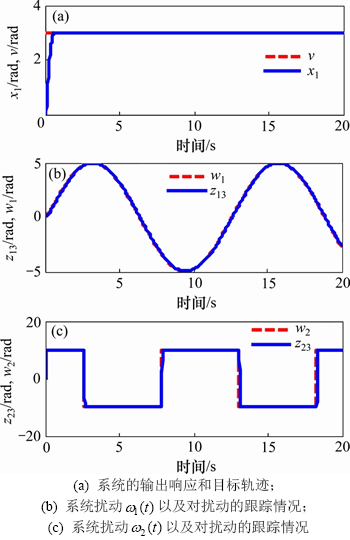
�ڽ��з���ʱ���趨ֵvΪ��ֵΪ3�Ľ�Ծ������ϵͳ��ʼֵ��Ϊ0��r=10�� ��
�� ��
�� ��
�� ��
�� ����������ͼ4��ʾ��
����������ͼ4��ʾ��
���ڽ�ϵͳ�Ŷ���Ϊ ��
��  �����ֿ����������в������䣬��������ͼ5��ʾ����ͼ5��֪��������ƵĴ��������Կ��ſ�����������ϵͳ������趨ֵ�ĸ���������Ƕ�ϵͳ��ȷ�����صĹ���������Ƿdz���Ч�ģ�˵������н�ǿ��³���ԺͿ�����������
�����ֿ����������в������䣬��������ͼ5��ʾ����ͼ5��֪��������ƵĴ��������Կ��ſ�����������ϵͳ������趨ֵ�ĸ���������Ƕ�ϵͳ��ȷ�����صĹ���������Ƿdz���Ч�ģ�˵������н�ǿ��³���ԺͿ�����������
3 ����LADRC��˫�������˻�������̬�����е�Ӧ��
3.1 ����ʽ˫�������˻���̬����ϵͳ��ģ��
����ʽ˫�������˻���̬����ϵͳ[12-14]�Ľṹʾ��ͼ��ͼ6��ʾ��
����ʽ˫�������˻���̬����ϵͳ[14-16]����ѧģ��Ϊ
ͼ4 LADRC������
Fig. 4 Simulation results of LADRC
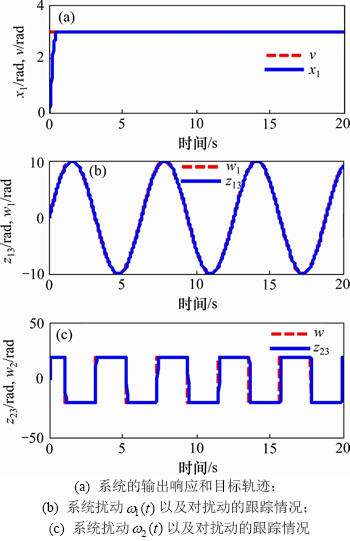
ͼ5 ����2������LADRC������
Fig. 5 Simulation results of second order second level cascade LADRC

ͼ6 ����ʽ˫�������˻���̬����ϵͳ�ṹʾ��ͼ
Fig. 6 Free-body diagram of tandem rotor UAV
 (15)
(15)
ʽ�У� Ϊ��б�ǣ�
Ϊ��б�ǣ� Ϊ�����ǣ�
Ϊ�����ǣ� Ϊ�г̽ǣ�V f ��Vb�ֱ�Ϊ����ǰ����2������ת�ٵĵ�ѹ��LwΪ�г��ᵽ���صľ��룬��ֵΪ0.35 m��LaΪ�г��ᵽ���˻���ľ��룬��ֵΪ0.88 m��LhΪ�����ᵽ�����ľ��룬��ֵΪ0.17 m��mwΪ���ص���������ֵΪ3.433 kg��mfΪǰ��������������ֵΪ1.8 kg��mbΪ����������������ֵΪ1.8 kg��GΪ����������������ֵΪ4.259 1 N��KfΪ��������ϵ������ֵΪ12 N/V��
Ϊ�г̽ǣ�V f ��Vb�ֱ�Ϊ����ǰ����2������ת�ٵĵ�ѹ��LwΪ�г��ᵽ���صľ��룬��ֵΪ0.35 m��LaΪ�г��ᵽ���˻���ľ��룬��ֵΪ0.88 m��LhΪ�����ᵽ�����ľ��룬��ֵΪ0.17 m��mwΪ���ص���������ֵΪ3.433 kg��mfΪǰ��������������ֵΪ1.8 kg��mbΪ����������������ֵΪ1.8 kg��GΪ����������������ֵΪ4.259 1 N��KfΪ��������ϵ������ֵΪ12 N/V�� Ϊ��б���ת����������ֵΪ1.814 5 kg��m2��
Ϊ��б���ת����������ֵΪ1.814 5 kg��m2�� Ϊ�г����ת����������ֵΪ1.814 5 kg��m2��
Ϊ�г����ת����������ֵΪ1.814 5 kg��m2�� Ϊ�������ת����������ֵΪ0.031 9 kg��m2��gΪ�������ٶȣ���ֵΪ9.81 m/s2��
Ϊ�������ת����������ֵΪ0.031 9 kg��m2��gΪ�������ٶȣ���ֵΪ9.81 m/s2��
3.2 ����LADRC�����
����˫�������˻���̬����ģ�Ϳ�֪�����ȣ�Ҫ��ģ�ͽ��н�������������U1��U2��˫�������˻�ģ��д��
 (16)
(16)
 (17)
(17)
 (18)
(18)
ʽ�У� ����Ϊ����ϵͳ�е��Ŷ��������������������ʵ������֮���ת����ϵΪ
����Ϊ����ϵͳ�е��Ŷ��������������������ʵ������֮���ת����ϵΪ
 (19)
(19)
ʽ�У� ��
�� ��
��
ͨ����˫�������˻�ģ�ͷ�����֪��ϵͳ�ɷ�Ϊ2�����֣���1��������б��ͨ������б������ͨ�����������U1ֱ�Ӵﵽ�趨ֵ����2�������ɸ�����ͨ�����г̽�ͨ����ɵ�1������ϵͳ����ʽ(17)��ʽ(18)��֪�����������U2����ֱ��������������Ȼ��ͨ���������������г̽���������[14]�У���Ե�2���ִ���ϵͳ�������4���������Կ��ſ����������������ʹ�㷨���ӣ������ڶ࣬�����������������߶Դ����Կ��ſ����������Ż��Ľ�������2�������Կ��ſ�����������ʽ˫�������˻���̬�ǽ��п��ƣ���̬���ƿ�ͼ[17-20]��ͼ7��ʾ��
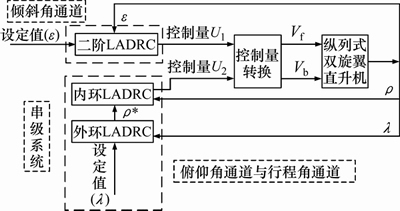
ͼ7 ˫�������˻���̬���ƿ�ͼ
Fig. 7 Block diagram of tandem rotor attitude control scheme
��б��ͨ���������������㷨���£�
 (20)
(20)
ʽ�У� ��
�� ��
�� Ϊ��б��ͨ���۲�������ֵ��
Ϊ��б��ͨ���۲�������ֵ�� Ϊ������������
������������
������ͨ�����г̽�ͨ���Ĵ���ϵͳ�������������㷨���£�

 (21)
(21)
ʽ�У� ��
�� Ϊ����ϵͳ�۲�������ֵ��
Ϊ����ϵͳ�۲�������ֵ�� Ϊ������������
������������ ������������
������������
ͨ���Կ��ſ��������Եõ����������U1��U2��Ȼ��ͨ��������ת�����Ի�õ������ʵ����������Vf��Vb��������ת�����£�
 (22)
(22)
4 ����ʽ˫�������˻�������̬���Ʒ���
����ǰ����������Ʒ�����ƴ��������Կ��ſ�����������MATLAB�����½������˻�������̬���档
ϵͳ��ʼֵΪ ������ʱ��Ϊ20 s����б��ͨ�����г̽�ͨ�����趨ֵ��Ϊ��ֵΪ30o������Ϊ20 s�ķ����źš�ϵͳ�Ŷ�
������ʱ��Ϊ20 s����б��ͨ�����г̽�ͨ�����趨ֵ��Ϊ��ֵΪ30o������Ϊ20 s�ķ����źš�ϵͳ�Ŷ� ��
�� �������Կ��ſ������ķ���������£�LTD�ٶ�����
�������Կ��ſ������ķ���������£�LTD�ٶ����� ��LESO�Ĵ���
��LESO�Ĵ��� ������������
������������ ��
�� ��
�� ��
�� ��
�� ���������Կ��ſ������ķ�������ͼ8��ʾ��
���������Կ��ſ������ķ�������ͼ8��ʾ��
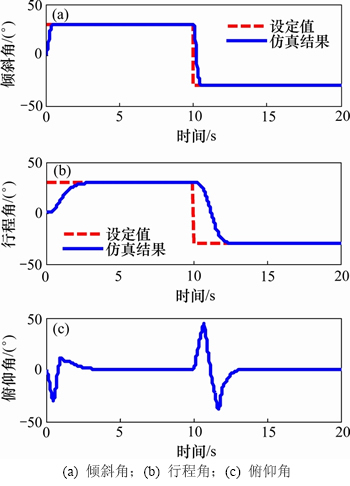
ͼ8 ������(���Ŷ�)
Fig, 8 Results of simulation (no disturbances)
���潫����б��ͨ����������ź� ���ڴ���ϵͳͨ����������ź�
���ڴ���ϵͳͨ����������ź�
 �����ڷ���ʱ��Ϊ5 sʱ��ϵͳ�м���1����Ծ���ţ������п��������������������£���������ͼ9��ʾ��ϵͳ�����������������ͼ10��ʾ���۲����Ը��ŵĸ��������ͼ11��ʾ��
�����ڷ���ʱ��Ϊ5 sʱ��ϵͳ�м���1����Ծ���ţ������п��������������������£���������ͼ9��ʾ��ϵͳ�����������������ͼ10��ʾ���۲����Ը��ŵĸ��������ͼ11��ʾ��
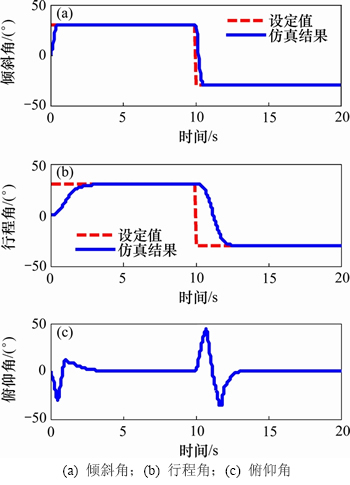
ͼ9 ������(���Ŷ�)
Fig. 9 Results of simulation (with disturbances)
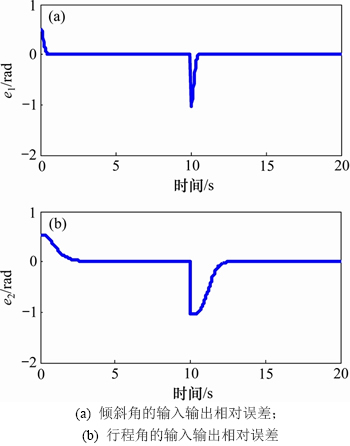
ͼ10 ������
Fig. 10 Relative errors
��ͼ8��ͼ9��֪������ϵͳ�Ƿ������ţ���б�Ǻ��г̽Ƕ��ܿ��ٵظ����趨�켣�������нϸߵ�ȷ�ԡ�Ϊ��һ��˵��ϵͳ�ĸ�����������и�����ϵͳ����������������ͼ10���Կ�����ϵͳ����������Ϊ0��ֻ�����趨�켣���ִ�IJ���ʱ���Ż���ֽ�С�������ͼ11�У�����Ϊ�����ź�����ʵ��Ϊ���Ź۲����Ը����ź����ĸ����������ɫ����Ϊ�۲����Ը����ź����Լ������Ծ����֮������Ŷ��źŵĸ��������ʵ������������״̬�۲������Ŷ��Ĺ�����ʮ�־�ȷ�ģ���һ��˵��������ƵĴ����Կ��ſ������н�ǿ��³���ԺͿ�����������

ͼ11 ����״̬�۲������Ŷ��ĸ������
Fig. 11 Tracking performances of ESO
5 ����
1) ���ø����������Եõ�ȷ���趨ֵ���źţ����ҿ��Ը�ϵͳ���밲�Ź��ɹ��̣��õ��⻬�������źţ�����ϵͳ��ʼ��
2) ��������״̬�۲������Ի��ϵͳ���Ŷ��Ĺ���ֵ�������䲹�����������У��������Ŷ���ϵͳ��Ӱ�죬���ϵͳ��³���ԺͿ�����������
3) ���������������ϵͳ��Ϊ�������ƣ����˿���������ƹ��̡�
4) ���������Կ��ſ����������١�����������Ƽ��ܹ����˫�������˻���̬�����з����ԡ�ǿ����Լ����Ŷ����еȿ������⣬���㹤��ʵ�ʵ���Ҫ����һ�ַdz���Ч�Ŀ��Ʒ�����
�ο����ף�
[1] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[2] GAO Zhiqing. Scaling and bandwidth-parameterization based controller tuning[C]// Proceedings of the 2003 American Control Conference. Denver. America: IEEE, 2003: 4989-4996.
[3] ���Ƿ�. ����ʽֱ�������ж���ѧ��ģ��ƽ�⡢�ȶ��ԺͲ����Լ���[D]. �Ͼ�: �Ͼ����պ����ѧ���պ���ѧԺ, 2009: 1-30.
ZHANG Yafei. A mathematical model of tandem helicopter flight dynamics and calculating on the trim, stability and handling quality[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. School of Aerospace Engineering, 2009: 1-30.
[4] �����, �ųл�, ������. ģ��������PID�����������ɶ�ֱ����ʵ��ϵͳ�е�Ӧ��[J]. ��Ϣ�����, 2010, 39(3): 342-347.
GENG Jinlai, ZHANG Chenghui, CUI Naxin. Fuzzy self-tuning PID controller in the 3-DOF helicopter experimental system[J]. Information and Control, 2010, 39(3): 342-347.
[5] ����. ����³�����Ƶ������ɶ�ֱ������ʵ�����ʵ��[J]. �����Զ���, 2016, 35(1): 72-74.
HU Yue. Semi physical simulation experiment of three DOF helicopter based on robust control[J]. Ordnance Industry Automation, 2016, 35(1): 72-74.
[6] ���Բ�. ���������ɶ�ֱ����ģ�͵�����Ⱥ�Ż�����������㷨�о�[D]. ������: ������������ѧ�Զ���ѧԺ, 2016: 1-50.
WANG Xianbo. Research on the particle swarm optimization neural net control based on three-DOF helicopter model[D]. Harbin: Harbin University of Science and Technology. School of Automation, 2016: 1-50.
[7] ���³�, ��Ө, ��־��. �����ɶ�ֱ����ģ�͵�������ٿ���[J]. ϵͳ����ѧ��, 2007, 19(18): 4279-4283.
YUE Xincheng, YANG Ying, GENG Zhiyong. No steady-state error tracking control of 3-DOF experimental helicopter system[J]. Journal of System Simulation, 2007, 19(18): 4279-4283.
[8] �信��, �����. �����ɶ�ֱ����ģ������Ӧ��ģ������[J]. ������������ѧѧ��, 2015, 20(2): 35-40.
WU Junfeng, JIA Jingyuan. Research on adaptive neural fuzzy control of 3-DOF helicopter model[J]. Journal of Harbin University of Science and Technology, 2015, 20(2): 35-40.
[9] WITT J, BOONTO S, WERNER H. Proximate model predictive control of a 3-DOF helicopter[C]// Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, USA: IEEE, 2007: 4501-4506.
[10] KUTAY A T, CALISE A J, IDAN M. Experimental results on adaptive output feedback control using a laboratory model helicopter[J]. IEEE Transactions on Control Systems Technology, 2005, 13(2): 196-202.
[11] KIEFER T, KUGI A, GRAICHEN K. Feedforward and feedback tracking control of a 3DOF helicopter Experiment under input and output constrains[C]// Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, USA: IEEE, 2006: 1586-1593.
[12] LIU Hao, LU Geng, ZHONG Yisheng. Robust LQR attitude control of a 3-DOF laboratory helicopter for aggressive maneuvers[J]. IEEE Transactions on Industrial Electronics, 2013, 60(10): 4627-4636.
[13] ������, ��ͺ�, ������. ����ʽ����ֱ������ģ���侫ȷ���Ի������о�[J]. ���������, 2004, 19(9): 1074-1077.
HU Chunhua, ZHU Jihong, SUN Zenqi. Modeling and exact linearization for an unmanned tandem helicopter[J]. Control and Decision, 2004, 19(9): 1074-1077.
[14] ����ǿ, ����, Ԭ����, ��. �����Կ��ſ�����������ʽ˫����ֱ����������̬�����е�Ӧ��[J]. ����������Ӧ��, 2015, 32(9): 1219-1225.
CHEN Zengqiang, LI Yi, YUAN Zhuzhi, et al. Attitude control of tandem rotor helicopter based on cascade active disturbance rejection control[J]. Control Theory & Application, 2015, 32(9): 1219-1225.
[15] ZHU Bo, LIU Hongtao, LI Zhan. Robust distributed attitude synchronization of multiple three-DOF experimental helicopter[J]. Control Engineering Practice, 2015, 36(1): 87-99.
[16] �ƹ��, �̺鲨. �����ɶ�ֱ����ģ��³�����������[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2010, 36(5): 105-111.
TANG Guanghui, SHI Hongbo. Robust controller design for 3-DOF helicopter model[J]. Journal of East China University of Science and Technology(Natural Science Edition), 2010, 36(5): 105-111.
[17] WANG Xiuyan, ZHAO Changli, LI Zongshuai. Robust H-infinity tracking control of 3-DOF helicopter model[C]// Proceedings of 2010 International Conference on Measuring Technology and Mechatronics Automation. Changsha, China: IEEE, 2010: 279-282.
[18] GAO Weinan, FANG Zheng. Adaptive integral backstepping control for a 3-DOF helicopter[C]// Proceedings of 2012 IEEE International Conference on Information and Automation. Shenyang, China: IEEE, 2012: 190-195.
[19] ֣��, ������. һ��Quanserֱ������³����̬���������[J]. �廪��ѧѧ��(��Ȼ��ѧ��), 2011, 51(3): 323-327.
ZHENG Bo, ZHONG Yisheng. Robust attitude regulator design for a class of Quanser helicopter[J]. Journal of Tsinghua University(Natural Science Edition), 2011, 51(3): 323-327.
[20] BORIS A, DIMITRI P, ALEXANDER L. Adaptive control of 3-DOF motion for LAAS helicopter benchmark: design and experiments[C]// Proceedings of the 2007 American Control Conference. New York, USA: IEEE, 2007: 3312-3317.
(�༭ ����ΰ)
�ո����ڣ�2018-04-25�������ڣ�2018-06-17
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61573197��61573199) (Projects(61573197, 61573199) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����ǿ�����ڣ���ʿ����ʦ����������Ԥ����ơ��Կ��ſ����о���E-mail: Chenzq@nankai.edu.cn
ժҪ�����������Կ��ſ�����(LADRC)�ʹ��������Կ��ſ���������ɽṹ���������Ը�����������������״̬�۲����Լ������������ɣ������������ֵĵ����㷨��Ϊ�˽������ʽ˫�������˻���̬����ϵͳ��Ƿ�������������ǿ��ϵĿ������⣬��ƴ��������Կ��ſ��������о��������������ƵĴ��������Կ��ſ����������٣����ڲ����������ܹ�������ƾ��ȼ������Ե�Ҫ���Ҿ��н�ǿ��³���ԡ��������������Լ��Է�����ǿ���ϵͳ�Ľ���������
[3] ���Ƿ�. ����ʽֱ�������ж���ѧ��ģ��ƽ�⡢�ȶ��ԺͲ����Լ���[D]. �Ͼ�: �Ͼ����պ����ѧ���պ���ѧԺ, 2009: 1-30.
[5] ����. ����³�����Ƶ������ɶ�ֱ������ʵ�����ʵ��[J]. �����Զ���, 2016, 35(1): 72-74.
[6] ���Բ�. ���������ɶ�ֱ����ģ�͵�����Ⱥ�Ż�����������㷨�о�[D]. ������: ������������ѧ�Զ���ѧԺ, 2016: 1-50.
[7] ���³�, ��Ө, ��־��. �����ɶ�ֱ����ģ�͵�������ٿ���[J]. ϵͳ����ѧ��, 2007, 19(18): 4279-4283.
[8] �信��, �����. �����ɶ�ֱ����ģ������Ӧ��ģ������[J]. ������������ѧѧ��, 2015, 20(2): 35-40.
[13] ������, ��ͺ�, ������. ����ʽ����ֱ������ģ���侫ȷ���Ի������о�[J]. ���������, 2004, 19(9): 1074-1077.
[16] �ƹ��, �̺鲨. �����ɶ�ֱ����ģ��³�����������[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2010, 36(5): 105-111.
[19] ֣��, ������. һ��Quanserֱ������³����̬���������[J]. �廪��ѧѧ��(��Ȼ��ѧ��), 2011, 51(3): 323-327.
