
DOI: 10.11817/j.issn.1672-7207.2017.01.010
���ڸ��Ź۲�����Ƿ����AUV����Ӧ���ݿ���
��Ρ��κ�ӻԣ������ԣ������ˣ�������
(���������̴�ѧ �Զ���ѧԺ�������� ��������150001)
ժ Ҫ��
�Ŵ��ڵ���������һ�ֻ��ڷ����Ը��Ź۲���(NDO)������Ӧ���ݿ��ƣ����ڸ���Ƿ��������ˮ�»�����(AUV)��ȸ��ٿ������ܡ����ȶ�Ƿ��������ˮ�»����˵Ĵ�ֱ��ģ�ͽ����������ļ��õ��µ��˶�ѧ������ѧ���̣�������ģ�͵�״̬���̣���θ���ϵͳ״̬���̹��������Թ۲������������Ӧ���ݿ��������������������������ŵ���ȶ�ԭ���Ƶ��ó���ȷ�����������Ը��Ź۲���������Ӧ���ݿ��������ڵĿ���ϵͳ��һ�½����ȶ��ԡ��о��������������Ƶķ����Ը��Ź۲����Լ�����Ӧ���ݿ���������ʵ��Ƿ��������ˮ�»������ڴ������δ֪�����������ȹ켣���٣����н�ǿ��³���ԡ�
�ؼ��ʣ�
Ƿ��������ˮ�»���������ȸ����������Ը��Ź۲���������Ӧ�����ݷ���
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2017)01-0069-08
Adaptive backstepping control of underactuated AUV based on disturbance observer
CHEN Wei, WEI Yanhui, ZENG Jianhui, HU Jiaxing, WANG Zepeng
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Abstract: In order to improve the depth tracking control performance of underactuated autonomous underwater vehicle (AUV), an adaptive backstepping controller based on nonlinear disturbance observer (NDO) was proposed considering unknown external disturbance. Firstly, the vertical plane motion model of underactuated AUV was simplified according to some limited conditions. The new kinematics and dynamics equations were obtained, and the state equations of simplified model were established as well. Secondly, on the basis of state equations, a nonlinear disturbance observer was constructed. In the meanwhile, an adaptive backstepping controller was designed based on NDO, and then the control output was obtained according to the Lyapunov stability principle, which globally guaranteed the asymptotical stability of the whole control system. The results show that designed NDO and adaptive backstepping controller can effectively achieve depth trajectory tracking of underactuated AUV in the case of unknown external disturbance, and show strong robustness to disturbance.
Key words: underactuated AUV; depth tracking; nonlinear disturbance observer; adaptive control; backstepping control
����ˮ�»�����(AUV)��һ���ܹ������������У�����Ҫʵʱ��Ԥ���̵�ˮ�����ܻ����ˣ������ң��ˮ�»����˶��ԣ�AUV������ҵ��ΧԼ���٣���ҵ�����п����dz���ɵ�����ҵ����ɶ��Эͬ�������ص�[1-2]����������ص����ƣ�AUV���㷺������ĸ�����ҵ������纣����⣬��ͼ���ƣ��������ȡ�ˮ�»�����������Ҫ��ɸ�ʽ���������ʶ�������̬�����Լ��˶����Ƶ����ʮ����Ҫ��Ƿ����AUV��AUV��һ�ֳ��������ͣ����ص��ǿ����������ĿС���˶����漰���ɶȵ���Ŀ��Ŀǰ���Ƿ����AUV���Ƶ��о���Ҫ����ˮƽ�棬��ֱ�棬�Լ���ά�켣���ٵ��о�����[3-6]���ֺ�����[6]��������Ӧ���������ʵ����Ƿ����AUV��ʱ�亽�����и�����Ƶ�Ŀ�ꡣZHANG��[7]������һ�����͵�����Ӧ���������÷������� DRFNNʵ������Ԥ�̬����δ֪�ķ�����·����RAIMONDI��[8]������һ����ջ�ģ������������ʵ��Ƿ����AUVˮƽ���ں����˶��Ŀ��ơ��߽���[9]���ڼ���ϵͳ���ۣ����������λ���Լ������2�������ĸ��ٿ��������о���Ƿ����AUVˮƽ��켣�������⡣���ڵ�[10]���ģ�Ͳ�ȷ������µ�Ƿ����AUVˮƽ���ڹ켣�������⣬����˿�����Ч����ϵͳ�������������Ӧģ����ģ��������LI��[11]��AUV�Ĵ�ֱ���ڶ���ѧģ�ͼ�Ϊ�ϸ�ķ����Է���ϵͳ���Ӷ�ʵ�ִ�ֱ�����˶��Ŀ��ơ�NAIK��[12]��Ƿ����AUV��ȿ��Ƶ����������ת��Ϊ����SDRE�������һ������ϵͳ��������ʵ���������ת��������ӡ��[13]ͨ������Ӧ���������������������������������������AUV��������ı�����Ʒ������ܼѼӵ�[14]��������ˮ�º�����UUV��ˮƽ��·�����٣������һ������Ӧ���Ʒ����������Ը��Ź۲���(NDO)��������ڷ�����ϵͳ�Լ�����δ֪�����ŵ�����£���������ϵͳ�ĸ��ȷ������в������Ӷ�����ϵͳ���ڲ�ȷ�������ŵij�������[15-16]���Ǽ̺��[15, 17]����NDO��˼�룬�ֱ�۲�ֱ����ϵͳ�߳����ٷ�����ϵͳ������������ڵIJ�ȷ��������ϵͳ���������켣�����ܣ�����Ӧ���ݿ��Ʒ���������Ӧ�㷨�ͷ��ݿ������ϵõ���������������ϵͳʱ������Լ�δ֪�����Ŷ�ϵͳ��Ӱ�죬���й㷺��Ӧ��������������[3, 6, 17]�ֱ���AUV��ȡ�AUV��ά���������Լ��������Ļ�ģ���Ƶȿ�������ƹ�������������Ӧ�����㷨��������ϵͳ�Ķ�̬���ܡ������������Ƿ����AUV�ܵ������ŵĿ����о���༯����ϵͳ������������Ӧ���ɵ�����ϣ��ڴ˻������������ܿ��ơ�³�����ơ�������ڵȣ���ƹ��̽�Ϊ���ӣ�ȴ��Խ��ٹ�ע���ű�����Ԥ����ơ�����NDO������Ӧ���ݿ����㷨������ʵ�������ŵĹ۲��Լ���������IJ��������Ϳ�����������Ѷȡ��������߲��û��ڷ����Ը��Ź۲���������Ӧ���Ʒ���������ڲ�ȷ������������£�������ǿ��ƣ�ʵ��Ƿ��������ˮ�»����˸���������ȡ�����������ŵ���ȶ������ۣ���ȷ��ϵͳһ�½����ȶ���ǰ���£�����빹���˷����Ը��Ź۲���������Ӧ��������ȷ���˶�ǿ��Ƶı���ʽ������Ӧ���ɡ�������ʵ��Ľ��������֤�ÿ��Ʒ���������Ƿ����AUV��ֱ���ģ�͵���������£��ܺܺõ�ʵ�ֿ���Ŀ�꣬���ֳ���ǿ�ĵֿ����δ֪���ŵ�³���ԡ�
1 Ƿ����AUV��ֱ��ģ��
����AUV���ԣ�ͨ������ţ��-ŷ�����������������ɶȵ��˶�ѧ������ѧģ��[6]��������ʾ��ʽ���£�
 (1)
(1)
���У� Ϊ������������ϵ�е������ٶȡ������ٶȡ������ٶ��Լ���ҡ���ٶȡ�������ٶȡ�������ٶȣ�
Ϊ������������ϵ�е������ٶȡ������ٶȡ������ٶ��Լ���ҡ���ٶȡ�������ٶȡ�������ٶȣ� Ϊ�����ڹ���ϵ�е���������Լ���ҡ�ǡ�����Ǻͺ���ǣ�MΪ���Ծ���
Ϊ�����ڹ���ϵ�е���������Լ���ҡ�ǡ�����Ǻͺ���ǣ�MΪ���Ծ��� Ϊ�������������������
Ϊ������������������� Ϊˮ��������������
Ϊˮ�������������� Ϊ���������ܸ��������ĺ�������Ӧ�ָ����ع��ɵ�������
Ϊ���������ܸ��������ĺ�������Ӧ�ָ����ع��ɵ������� ΪAUV�Ŀ�������
ΪAUV�Ŀ������� ΪAUV���ܵ��������š�
ΪAUV���ܵ��������š�
Ϊ�õ�Ƿ����AUV��ֱ���˶�ѧ�Լ�����ѧģ�ͣ�����AUVˮƽ���봹ֱ���˶�ʵ�ֽ�������� ��
�� ��
�� �����Ժ�ҡ�˶�������ҡ�Լ������˶��ĸ��ţ����Եõ����¼Ĵ�ֱ��ģ��[12]��������������ƽ�����֤�������ٶ�ά���ڳ�ֵu����������u��0��Ƿ����AUV�����ȸ�����Ҫ�������
�����Ժ�ҡ�˶�������ҡ�Լ������˶��ĸ��ţ����Եõ����¼Ĵ�ֱ��ģ��[12]��������������ƽ�����֤�������ٶ�ά���ڳ�ֵu����������u��0��Ƿ����AUV�����ȸ�����Ҫ������� ��Ϊ�������롣
��Ϊ�������롣

 (2)
(2)


 (3)
(3)
 (4)
(4)
 (5)
(5)
���У�wΪ�����ٶȣ�qΪ������ٶȣ� Ϊ����ǣ�zΪAUV��DZ��ȣ�uΪ�����ٶȣ�������ά���ڳ�ֵ��mΪAUV������WΪAUV������BoΪAUV���ܸ�����IyyΪ��y��ת��������Muu��ZuuΪ���ϵ����
Ϊ����ǣ�zΪAUV��DZ��ȣ�uΪ�����ٶȣ�������ά���ڳ�ֵ��mΪAUV������WΪAUV������BoΪAUV���ܸ�����IyyΪ��y��ת��������Muu��ZuuΪ���ϵ���� ��
�� �ֱ�Ϊˮ������������Ͳ�����Ϊ��ǿ������룻dextΪ������AUV�ϵĸ������أ�xG��zG�ֱ�ΪAUV������������ϵ�ڵ����������xB��zB�ֱ�ΪAUV������������ϵ�ڵ����������
�ֱ�Ϊˮ������������Ͳ�����Ϊ��ǿ������룻dextΪ������AUV�ϵĸ������أ�xG��zG�ֱ�ΪAUV������������ϵ�ڵ����������xB��zB�ֱ�ΪAUV������������ϵ�ڵ����������
���о���Ҫ��������ģ�ͽ�һ��������AUV�Ĵ����ٶ����� ��
�� ����������ڱȽ�С�ķ�Χ�ڱ仯����������
����������ڱȽ�С�ķ�Χ�ڱ仯���������� ��
�� ��
�� ��
�� �����Զ���������С�����ʽ(3)~(5)�õ��µĴ�ֱ���˶�ģ��[18]��
�����Զ���������С�����ʽ(3)~(5)�õ��µĴ�ֱ���˶�ģ��[18]��
 (6)
(6)
���� ��
��
�� ��
�� ��
�� ������Եõ�Ƿ����AUV����ѧ���̵�״̬������ʽ
������Եõ�Ƿ����AUV����ѧ���̵�״̬������ʽ
 (7)
(7)
���� ��
�� ��
�� ��
�� ��
��
2 ���ڷ����Ը��Ź۲���������Ӧ�������
Ϊ��ʹ��������ǿ���ʵ�ָ���Ŀ����ȣ��ڴ���δ֪�����ŵ�����£�����������Ӧ���ݿ������Ѿ������������С�Ŀ�����ǰ����ʵ�ֿ���Ŀ�ꡣͨ����������Թ۲�������ƣ����Եõ���������IJ������룬�ֲ�������Ӧ������Ӧ��ͻ��δ֪���ŵIJ��㡣��������ϵͳ�����˼·��ͼ1��ʾ��
2.1 �����Ը��Ź۲��������
�ο������Թ۲�������Ʒ���[19-20]��Ϊ����NDO����ƣ�����״̬���� ����״̬���̿���д��������ʽ�ı���ʽ��
����״̬���̿���д��������ʽ�ı���ʽ��
 (8)
(8)
���� ��
��
 ��
�� ��
��
���ǵ������Ը��Ź۲�������ʽ��

ͼ1 ����NDO������Ӧ���ݿ���ϵͳ�ṹ
Fig. 1 Structure of adaptive backstepping control system with NDO
 (9)
(9)
���У� ��p1��p2��p3��Ϊ��������p1��0��p2��0��p3��0��
��p1��p2��p3����������p1��0��p2��0��p3��0�� ��
��
���� ������һ�������û�й��ڸ�����d��������Ϣ��Ϊ�˷���������������������ϵͳ�Ķ�̬���Ա仯����ʱ�����Լ���
������һ�������û�й��ڸ�����d��������Ϣ��Ϊ�˷���������������������ϵͳ�Ķ�̬���Ա仯����ʱ�����Լ��� ������ʽ(9)���Եõ�
������ʽ(9)���Եõ�
 (10)
(10)
��һ����֪
 (11)
(11)
���������Ը��Ź۲�����Lyapunov���� ����
���� ���ʸ÷����Թ۲������ȶ��ġ�
���ʸ÷����Թ۲������ȶ��ġ�
����۲������������Ϊ
 (12)
(12)
2.2 ����Ӧ���������������
������������Ը��Ź۲�����������������ڶ�ǿ����ϣ�ϵͳ��״̬����(7)���Ը�дΪ
 (13)
(13)
���� ��
�� ��
��
���ڶ�������ŵ���Ԥ֪�ԣ�Ϊ��֤ϵͳ����ѿ������ܣ���Ҫ�Թ۲����õ��ĸ�������� ���й��ƣ����������ֵΪ
���й��ƣ����������ֵΪ ������������
������������ ��ͬ������۲����õ��ĸ������������ڿ���ϵͳ�Ķ�̬�Ա仯������������
��ͬ������۲����õ��ĸ������������ڿ���ϵͳ�Ķ�̬�Ա仯������������ ������
������ ��������ƺ���������Ӧ���ơ�
��������ƺ���������Ӧ���ơ�
����״̬���̣����÷��ݷ���ƿ����������������Լ��������롣
��AUV��Ŀ�����Ϊ ��ʵ�����Ϊx1��ȸ������������Ϊ��
��ʵ�����Ϊx1��ȸ������������Ϊ��
 (14)
(14)
 (15)
(15)
�����������1�������������
 ��u��0��k1��0 (16)
��u��0��k1��0 (16)
��������ǵĸ���������Լ�Lyapunov����
 (17)
(17)
 (18)
(18)
�����������2�������������
 ��k2��0 (19)
��k2��0 (19)
��������ǽ��ٶȵĸ���������Լ�Lyapunov������
 (20)
(20)
 (21)
(21)
��ʽ(14)��(17)��(20)�ɵ�
 (22)
(22)
 (23)
(23)

 (24)
(24)
���ǵ������Ը��Ź۲����ĸ������ع۲�ֵ �Լ��Ը������ع۲����������ֵ����Ҫ���¹���Lyapunov����
�Լ��Ը������ع۲����������ֵ����Ҫ���¹���Lyapunov����
 ��
�� ��0 (25)
��0 (25)
��V4���õ���




 (26)
(26)
ѡȡ����Ӧ������Ϊ
 (27)
(27)
ѡȡ����Ӧ���ݿ��������������Ϊ��

 ��
�� ��0 (28)
��0 (28)
����ʽ(26)��֪
 (29)
(29)
���ҽ��� ʱ��
ʱ�� ���ʸ�ϵͳΪȫ�ֽ����ȶ���
���ʸ�ϵͳΪȫ�ֽ����ȶ���
���Ͽ��Եõ�AUV�Ķ�ǿ��ƹ���Ϊ
 (30)
(30)
3 ����ʵ��
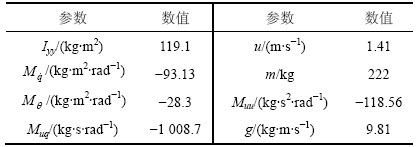
ij��Ƿ����AUV����������ز������1��ʾ��ѡȡ��Ʒ����Ը��Ź۲����IJ���Ϊ��p1=1��p2=1��p3=9 ������Ӧ���ݿ������IJ������£�k1=1��k2=1.5��k3=1�� ��
��
��1 AUV���������
Table 1 Simulation parameters of AUV
����AUV�ij�ʼ���Ϊ5.8 m�������ƹ��ɿ���AUVʹ�����Ŀ����ȣ������˶������У�����AUVʩ�������ظ��ţ���Ƶ�AUVĿ�����zd�Լ������ظ���dext����ʽ����:
 (31)
(31)
 (32)
(32)
��AUV����Ŀ����ȹ����У���ǿ������ɿ���������������Լ��۲������������2������ɡ���80��t��120 s��140��t��200 s�ֱ��AUVʩ��ͻ�������ظ��ź�ʱ�������ظ��ţ���ͼ2��ͼ3��ʾ�������й۲��������������AUV���ܵ�������ʱ��������ȫʵ��Ŀ����ȸ��٣����۲����������ʱ����ͼ4��ͼ5��ʾ��AUV��ȸ������ܵ�����ʱ����ʵ����ȫ����Ŀ����ȣ�����ֽϴ���ȵĸ�����������ﵽ0.2 m���൱�ڱ仯������ȷ�ֵ1 m��20%����ͼ3��ͼ5�ԱȺ�ɼ���������Ը��Ź۲������ڵֿ���������ʮ����Ч�ġ�
����������Ը��Ź۲�����ϵͳ�У���������ʵ��ֵ���۲�ֵ��ͼ6��ʾ����ͼ6��֪����Ӹ������ص�ʵ��ֵ��۲����õ��Ĺ۲�ֵ���۲����������õĿ��Ʋ������ã������ڸ�������ʵ��ֵ��۲�ֵ�����������������Ӧ���ƹ��ɵõ������ֵ����ͼ7��ʾ����ͼ7��֪����Ƶ�����Ӧ������ʵ�������Ĺ��ƣ������ϵͳ�Ŀ��ƾ��ȡ�
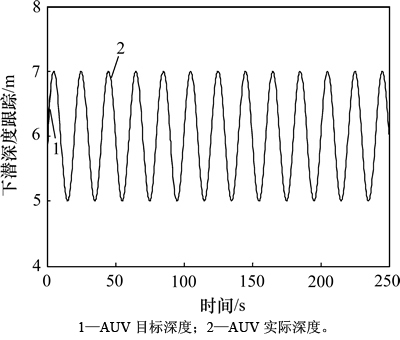
ͼ2 �й۲���ʱAUV��ȸ�������
Fig. 2 Depth trajectory of AUV with NDO
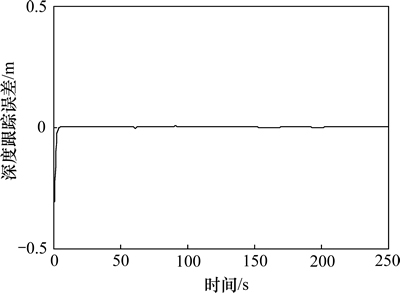
ͼ3 �й۲���ʱAUV��ȸ������
Fig. 3 Depth trajectory error of AUV with NDO

ͼ4 �۲���ʱAUV��ȸ�������
Fig. 4 Depth trajectory of AUV without NDO
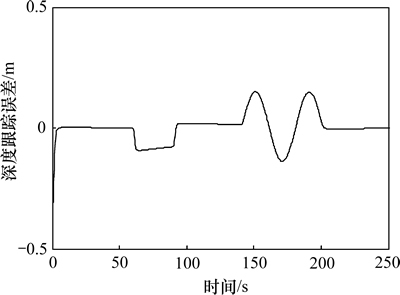
ͼ5 �۲���ʱAUV��ȸ������
Fig. 5 Depth trajectory error of AUV without NDO
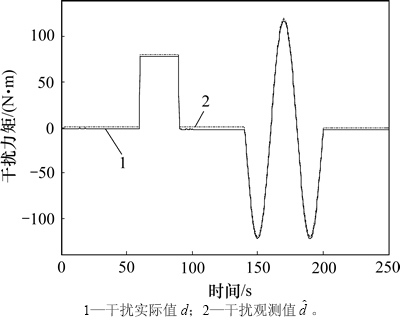
ͼ6 ��������ʵ��ֵ���۲�ֵ
Fig. 6 Actual value and observed value of disturbance

ͼ7 �����������ʵ��ֵ��۲�ֵ
Fig. 7 Error between actual value and observed value of disturbance
���ݶ�ǿ���������ʽ(30)��֪����ǿ������ɿ��������������us�Լ��۲������������ud 2������ɡ�us��ud���仯���߷ֱ���ͼ8��ͼ9��ʾ��
Ϊ����֤����ƿ����㷨����Ч�ԣ���ͻ������Լ���������ʱ��ʹ�û���PID���Ʒ������з��棬��Ӧ�����ͼ10��ʾ���Ա�����ƵĻ���NDO������Ӧ���ݿ��Ʒ����������Եó�����ƿ����㷨³����ǿ�����ƾ��ȸߣ��������С��
����NDO ����Ӧ�����㷨����AUV����Ŀ����ȵĹ����У����Եõ������״̬�����ı仯���ߣ���ͼ11��ʾ����ͼ11���Կ�������ƽ�ȸ��ٹ����У���������ֵֻ��10�����ң������ٶ� m/s������ģ�ͼ����������ϣ����Եó��û��ڷ����� ���Ź۲���������Ӧ���ݿ���ȡ���˽ϺõĿ���Ч����
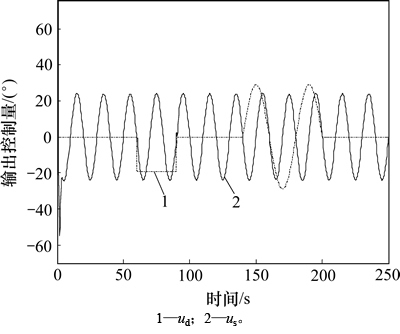
ͼ8 �۲���������Ӧ���������������
Fig. 8 Control value from observer and adaptive controller
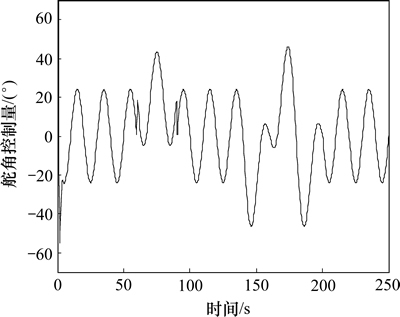
ͼ9 ��ǿ�����
Fig. 9 Control input of rudder
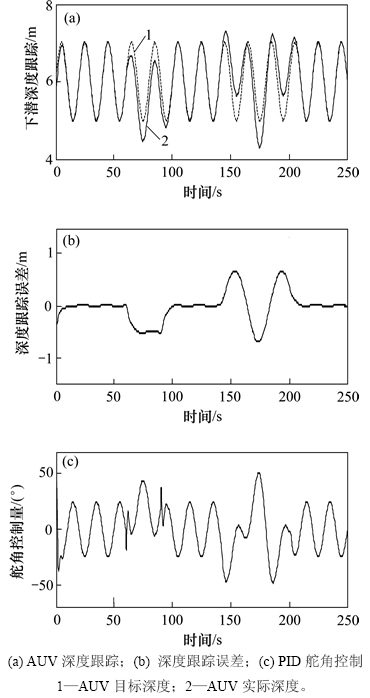
ͼ10 AUV��ȸ��ٿ���(PID����)
Fig. 10 Depth trajectory control of AUV (PID controller)
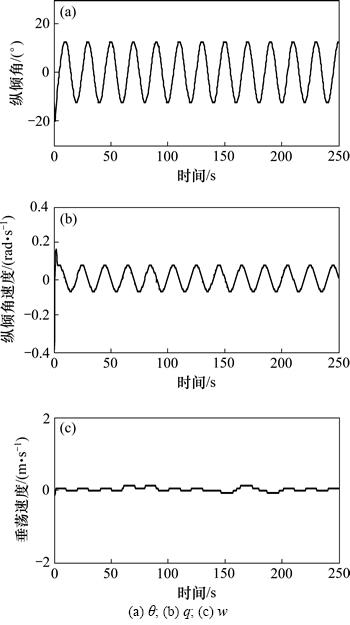
ͼ11 AUV״̬����
Fig. 11 State variables of AUV
4 ����
1) ͨ����Ƿ����AUV�Ĵ�ֱ�����˶�ѧ�Լ�����ѧ����������������м��õ���Ƿ����ģ�͡�
2) ���AUV�ܵ��������������������Ը��Ź۲����������ڹ۲����۲�������������������Ӧ���ƹ��ɣ��ڴ˻����ϣ����������Ӧ���ݿ�������
3) ͨ�����������AUV����������з���ʵ�飬�õ��������������£����Ź۲�ֵ��������������������۲�������������Ͷ�ǿ�������һϵ�б������ߣ�������仯���ɵķ�������֤������ƿ��Ʒ������õĿ������ܡ�
�ο����ף�
[1] ����ʢ, ��һƽ, �����. ��һ�����������: д�����ഴ����DZ��������¼10 912 m 50����֮��[J]. ������, 2011, 33(1): 113-118.
FENG Xisheng, LI Yiping, XU Hongli. The next generation of unmanned marine vehicles dedicated to the 50 anniversary of the human world record diving 10 912 m[J]. Robot, 2011, 33(1): 113-118.
[2] ������, Ф��. ���ܺ�������˼�����չ[J]. �Զ���ѧ��, 2007, 33(5): 518-521.
XU Yuru, XIAO Kun. Technology development of autonomous ocean vehicle[J]. Acta Automatica Sinica, 2007, 33(5): 518-521.
[3] ������, ��ѩ, �Խ�÷, ��. ��ֱ��Ƿ��������ˮ�»����˶������������Ӧ�����������[J]. ����������Ӧ��, 2012, 29(10): 1371-1376.
ZHANG Lijun, QI Xue, ZHAO Jiemei, et al. Depth-keeping control for autonomous underwater vehicle in vertical plane using adaptive output feedback controller[J]. Control Theory & Applications, 2012, 29(10): 1371-1376.
[4] �Ὠ��, �Ű�Ⱥ, ������, ��. ����ģ��������ˮ�»�����ֱ������Ӧ����[J]. �Զ���ѧ��, 2007, 33(8): 840-846.
YU Jiancheng, ZHANG Aiqun, WANG Xiaohui, et al, Direct adaptive control of underwater vehicles based on fuzzy neural networks[J]. Acta Automatica Sinica, 2007, 33(8): 840-846.
[5] κ�ӻ�, ������, ʢ��, ��. ����ʽˮ�»������˶��ȶ��Կ��Ʒ���[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2014, 42(2): 127-132.
WEI Yanhui, PENG Fuguo, SHENG Chao, et al. Control method of the stability of AUV[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2014, 42(2): 127-132.
[6] �ֺ���, ������, ������, ��. ��������ӦBackstepping��Ƿ����AUV��ά�켣���ٿ���[J]. ���������, 2012, 27(5): 652-657.
JIA Heming, CHENG Xiangqin, ZHANG Lijun, et al. Three-dimensional path tracking control for underactuated AUV based on adaptive backstepping[J]. Control and Decision, 2012, 27(5): 652-657.
[7] ZHANG Lijun, QI Xue, PANG Yongjie. Adaptive output feedback control based on DRFNN for AUV[J]. Ocean Engineering, 2009, 36: 716-722.
[8] RAIMONDI F M, MELLUSO M. Hierarchical fuzzy/Lyapunov control for horizontal plane trajectory tracking AUV[C]// Proceeding of 2010 IEEE International Symposium on under-actuated of Industrial Electronics. Bari, Italy: IEEE, 2010: 1875-1882.
[9] �߽�, �����, ������, ��. Ƿ��������ˮ�º������켣���ٿ���[J]. ������ҵ��ѧѧ��, 2010, 28(3): 404-408.
GAO Jian, XU Demin, YAN Weisheng, et al. Applying cascaded systems theory to ensuring globally uniformly asymptotical stability of trajectory tracking controller of underactuated autonomous underwater vehicle(AUV)[J]. Journal of Northwestern Polytechnical University, 2010, 28(3): 404-408.
[10] ����, ��ʿ��, �Ź���, ��. Ƿ����ˮ�»����˺������ٿ���[J]. ��������ѧ��, 2013, 17(2): 103-111.
WAN Lei, CUI Shipeng, ZHANG Guocheng, et al. Path following control of underactuated autonomous underwater vehicles[J]. Electric Machines and Control, 2013, 17(2): 103-111.
[11] LI J H,LEE P M. Path tracking in dive plane for a class of torpedo-type underactuated AUVs[C]// Proceedings of the 7th Asian Control Conference. Hong Kong, China: IEEE, 2009: 360-365.
[12] NAIK M S, SINGH S N. State-dependent Riccati equation-based robust dive plane control of AUV with control constraints[J]. Ocean Engineering, 2007, 34(11/12): 1711-1723.
[13] ����ӡ, ���꽡, ����ǭ, ��. ���ڷ��������AUV�ȶ������練���������[J]. ���������, 2013, 28(3): 407-412.
CHEN Ziyin, WANG Hongjian, BIAN Xinqian, et al. Stable neural network backstepping for diving control of AUV based on feedback gain[J]. Control and Decision, 2013, 28(3): 407-412.
[14] �ܼѼ�, ����ƽ, �ֺ���, ��. �Ľ�����������Ӧ�������UUVˮƽ��·���������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(9): 3021-3028.
ZHOU Jiajia, YAN Zheping, JIA Heming, et al. Improved path-following in horizontal plane for UUV using adaptive neural network controller[J]. Journal of Central South University (Science and Technology), 2014, 45(9): 3021-3028.
[15] �Ǽ̺�, ����ƽ, ������. ���ڷ����Ը��Ź۲�����ֱ������ģ���ݿ���[J]. ����������ѧѧ��, 2009, 29(3): 224-228.
QIAO Jihong, DAI Yaping, LIU Jinkun. Sliding backstepping control for helicopters with nonlinear disturbance observer[J]. Transactions of Beijing Institute of Technology, 2009, 29(3): 224-228.
[16] �ֺ���, ������. ���ڷ����Ը��Ź۲�����L2�˲���������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(8): 2640-2647.
JIA Heming, SONG Wenlong. L2 filtered backstepping control based on nonlinear disturbance observer[J]. Journal of Central South University (Science and Technology), 2014, 45(8): 2640-2647.
[17] �γ�, �Թ���, �ǿ���. ���ڷ����Ը��Ź۲����ĸ߳����ٷ��������ݻ�ģ��[J]. ϵͳ��������Ӽ���, 2012, 34(6): 1231-1234.
SONG Chao, ZHAO Guorong, GAI Junfeng. Sliding mode backstepping control for hypersonic aircraft based on nonlinear disturbance observer[J]. Systems Engineering and Electronics, 2012, 34(6): 1231-1234.
[18] KELLER J J. Tracking control of autonomous underwater vehicles[D]. Monterey, CA: School of Naval Postgraduate. Department of Mechanical Engineering, 2002: 5-7.
[19] MOHAMMED S, HUO W G, HUANG J, et al. Nonlinear disturbance observer based sliding mode control of a human-driven knee joint orthosis[J]. Robotics and Autonomous Systems, 2016, 75: 41-49.
[20] CHEN W H, BALANCE D J, GAWTHROP P J. A nonlinear disturbance observer for robotic manipulators[J]. IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938.
(�༭ ����ƽ)
�ո����ڣ�2016-01-04�������ڣ�2016-03-15
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51205074)�����ҿ�ѧ���������ʿƼ�������Ŀ(2014DFR10010)�������У��������ҵ���ר���ʽ�������Ŀ(HEUCF041703)�� �ߵ�ѧУ��ʿѧ�Ƶ�ר����л���������Ŀ(20112304120007) (Project(51205074) supported by the National Natural Science Foundation of China; Project(2014DFR10010) supported by the Ministry of Science and Technology of China; Project(HEUCF041703) supported by the Fundamental Research Funds for the Central Universities; Project(20112304120007) supported by the Research Fund for the Doctoral Program of Higher Education of China)
ͨ�����ߣ�κ�ӻԣ���ʿ��˶ʿ����ʦ�����»����˿��ơ����ع��������Լ�ˮ�»����˵��о���E-mail: wyhhit@163.com
ժҪ�����δ֪�����Ŵ��ڵ���������һ�ֻ��ڷ����Ը��Ź۲���(NDO)������Ӧ���ݿ��ƣ����ڸ���Ƿ��������ˮ�»�����(AUV)��ȸ��ٿ������ܡ����ȶ�Ƿ��������ˮ�»����˵Ĵ�ֱ��ģ�ͽ����������ļ��õ��µ��˶�ѧ������ѧ���̣�������ģ�͵�״̬���̣���θ���ϵͳ״̬���̹��������Թ۲������������Ӧ���ݿ��������������������������ŵ���ȶ�ԭ���Ƶ��ó���ȷ�����������Ը��Ź۲���������Ӧ���ݿ��������ڵĿ���ϵͳ��һ�½����ȶ��ԡ��о��������������Ƶķ����Ը��Ź۲����Լ�����Ӧ���ݿ���������ʵ��Ƿ��������ˮ�»������ڴ������δ֪�����������ȹ켣���٣����н�ǿ��³���ԡ�
[2] ������, Ф��. ���ܺ�������˼�����չ[J]. �Զ���ѧ��, 2007, 33(5): 518-521.
[4] �Ὠ��, �Ű�Ⱥ, ������, ��. ����ģ��������ˮ�»�����ֱ������Ӧ����[J]. �Զ���ѧ��, 2007, 33(8): 840-846.
[9] �߽�, �����, ������, ��. Ƿ��������ˮ�º������켣���ٿ���[J]. ������ҵ��ѧѧ��, 2010, 28(3): 404-408.
[10] ����, ��ʿ��, �Ź���, ��. Ƿ����ˮ�»����˺������ٿ���[J]. ��������ѧ��, 2013, 17(2): 103-111.
[13] ����ӡ, ���꽡, ����ǭ, ��. ���ڷ��������AUV�ȶ������練���������[J]. ���������, 2013, 28(3): 407-412.
[16] �ֺ���, ������. ���ڷ����Ը��Ź۲�����L2�˲���������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(8): 2640-2647.
