
�������ת�ؿ��Ƶ��첽���ֱ��ת�����ſ��Ʒ���
��Ѹ1, 2��������1��������1��������1
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
2. ������ҵ(����)�������ι�˾�����죬401326)
ժ Ҫ��
��ת�ؿ��Ƶ����ſ��Ʒ����������첽���ֱ��ת�ؿ��Ƶ��������У������˼���������Žβ��������δ����켣��ʹ��������ֵ����ת�ر仯�����Է�������ת�ظ���ֵ�����÷�������Ҫ��ȷ���첽������в�������ʵ���������з�ʽ������˳���ƽ�����ɡ����������й����н����Ӵ�������ֵ�������趨���䣬�ڲ�ͬ���ٶ������Ķ��Ӵ�������ֵ������Ҫ���Ӽ��㡣�������������첽���ֱ��ת�ؿ���ϵͳ���������ٺͽ��ٹ����е��������ܵõ����ƣ����������е�ͬһ�ٶ�ʱ���������ٻ��ٹ��������ת��С����ʱ�䳤������õ���Ч����������δ�����Բ�δ���֮���ܹ�ƽ�����ɡ�
�ؼ��ʣ�
��ͼ����ţ�TM301.2 ���ױ�־�룺A ���±�ţ�1672-7207(2012)01-0177-07
A novel flux-weakening scheme for direct-torque-control system of induction motor based on maximal torque control
LI Xun1, 2, LIU Wu-ling1, GUI Wei-hua1, YU Shou-yi1
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Southwest Aluminum (Group) Co. Ltd., Chongqing 401326, China)
Abstract: A new control scheme for flux-weakening operation of direct-torque-control induction motor drive was proposed. Its philosophy is to adapt hexagon flux track and make the flux reference respond to the change of the torque, thus weaken the spontaneous flux and limit the torque reference. The smooth transition into and out of the flux-weakening operation mode can be realized without any work parameters of the induction motor. The stator flux value is also restricted by a setting value in the whole process. It is easy to realize the control strategy by giving the flux reference in different speed stages without complicated calculation. Simulation verifies that the application of the control strategy improves the high speed performance of direct torque control effectively. With the premise of accelerating to the same speed, the problems of small output torque and long time for speed-up or slow-down are solved remarkably, and the smoothly transition between hexagon flux track and circular flux track is also implemented.
Key words: induction motors; direct torque control; flux-weakening; maximum torque
Ŀǰ�������г�������첽�綯��������������Ҫȷͣ���������У�Ҫ�����нϿ��ĵ��ٷ�Χ���ڱ������������������£����ڶת�����С��첽�綯������ͨ�����ſ�����ʵ�֡������ŽΣ������ת��������������µ��ٲ�ͬ�����Ǻ�ת�ص��ٶ��Ǻ㹦�ʵ��٣������ŷ�Χ�ڶ����ù�����ѹʸ������û�����ѹʸ��[1-3]����ͳ��ֱ��ת�ؿ������ŷ������������������Ӵ����ο�ֵ����ת�ٳɷ��ȱ仯�����Ӵ����ο�ֵ�ĸ�Ͷ�����ʹ��������������ת��[4-5]��Sanghoon[6-7]������ڵ�ѹ�ջ����Ƶ����ŷ���������ת�Ӵ�����������ֱ��ת�ؿ��ƶ��Ӵ���������Ʒ�����Casadei[8]����ķ����ܿ��˸��ӵĵ�����̣�ȴ�����˵�ѹ���������������ƶ��Ӵ�������ֵ��Xu��[9]��������ת�����ſ��Ʒ��������÷������������ڵ���������������衢©�кͻ��еȣ���Щ�����ڵ�����й����з����仯��Ӱ�����ŵ����ܡ�Kim��[10]�����һ��³�����ſ����㷨�������㷨��ת�Ӵ����ĸ���ֵ���г��õ��Ե�����Ի���������ܡ�Ŀǰ�����ǶԴų���������о�Խ��Խ��[11-16]���ڴˣ��������߷����첽���ֱ��ת�ؿ���ϵͳ����ԭ�������һ�ֻ������ת�ص����ſ����㷨���Ա������ٹ�����������ת�أ�ʵ�ֿ������١�
1 �첽�綯������ѧģ��
���Ӵ�����������ϵ�µĵ������Ϊ��
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
���У�rsΪ����������裻rrΪת�ӵ��裻![]() Ϊ���ӵ�ѹ��
Ϊ���ӵ�ѹ��![]() Ϊ���ӵ�����
Ϊ���ӵ�����![]() Ϊת�ӵ�����
Ϊת�ӵ�����![]() Ϊ���Ӵ�����
Ϊ���Ӵ�����![]() Ϊת�Ӵ�����TΪ���ת�أ�
Ϊת�Ӵ�����TΪ���ת�أ�![]() Ϊ���Ӵ�����ת���ٶȣ�
Ϊ���Ӵ�����ת���ٶȣ�![]() Ϊת����ת���ٶȣ�LsΪ�����ԸУ�LrΪת���ԸУ�LmΪ��ת�ӻ��У�pΪ��������
Ϊת����ת���ٶȣ�LsΪ�����ԸУ�LrΪת���ԸУ�LmΪ��ת�ӻ��У�pΪ��������
��ʽ(1)��d-q����ϵ���зֽ�ɵã�
![]() (6)
(6)
![]() (7)
(7)
��ʽ(3)��(4)�������õ�![]() ��
��![]() ��Ȼ��ֱ����ʽ(2)�ã�
��Ȼ��ֱ����ʽ(2)�ã�
![]() (8)
(8)
![]() (9)
(9)
ʽ�У�
![]() (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
�ɴˣ��첽�����ֱ��ת�ؿ���ϵͳ�µĵ��ת�ط��̿��Ա�ʾ�ɣ�
![]() (13)
(13)
���У�![]() Ϊ���Ӵ�����ת�Ӵ���֮��ļнǣ�����ͨ�ǡ���ʵ�������У�ͨ�����ڶ��Ӵ������Գ�����õ綯����ת�Ӵ����ɸ��ؾ�����
Ϊ���Ӵ�����ת�Ӵ���֮��ļнǣ�����ͨ�ǡ���ʵ�������У�ͨ�����ڶ��Ӵ������Գ�����õ綯����ת�Ӵ����ɸ��ؾ�����
2 �첽�綯��ֱ��ת�ؿ����������з���
�첽�綯��ֱ��ת�ؿ��ƵĻ���˼���ǣ��ڱ��ֶ��Ӵ�������������£����Ƶ綯�����Ӵ������˶�������ٶ����ı䶨�Ӵ�����ת�Ӵ����ļнǣ����ڵ��ת�أ��ﵽ�綯�����ٵ�Ŀ�ġ������ԭ���ǣ�����Band-Band����ֱ�ӿ��Ƶ綯���Ĵ�����ת�أ����ת�غ�ת�ٵĿ�����Ӧ�����ÿ��ر����ƶ��Ӵ����ؽ���Բ��(��������)�켣�˶���ֱ��ת�ؿ��Ƶ�ϵͳ�ṹ��ͼ��ͼ1��ʾ����������������任���������ѧģ�͡�����ģ�͡�ת�ؼ��㡢���α��͵�ѹʸ��ѡ��ȵ�Ԫģ�顣
�����첽�綯���ڲ�ͬ�ٶȷ�Χ������ʱ�Ļ�е���ʺʹ��������ԣ��ɽ�����Ϊ��ͬ�Σ���ͼ2��ʾ�����ٷ�Χ�ֳ�Ϊ��ת�ص��٣�Ϊ���о����㣬��ʱ�ֽ����ǽ�һ����Ϊ���ٷ�Χ�����ٷ�Χ�������͢��Ӧ��������ʱ�Ĺ��ʷ�Χ�����У����Ӧ�㹦�ʷ�Χ�����Ӧ�����ʷ�Χ��
�ڻ��ٷ�Χ�ڣ������ת�ٵ��ڶת�ٵ�10%~15%ʱ��Ϊ��ά�ִ�����ֵ�㶨�Լ�Сת�����������Կ��ƴ����켣ΪԲ�Σ���ת�ٽϸ�ʱ�����������δ����켣���ƿ��Դ���С������Ŀ���Ƶ�ʣ��������������������ġ�
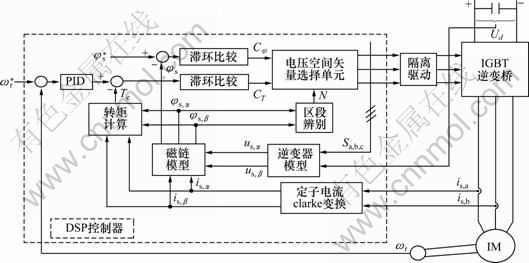
ͼ1 �첽���ֱ��ת������ģ�Ϳ�ͼ
Fig.1 Structure diagram of induction DTC system with flux-weekening

ͼ2 ��ȫ�ٷ�Χ��ת�غ�������
Fig.2 Torque and power characteristics in wide speed range
2.1 ����״̬�µ�ת�ظ�������
�����Ź����У����ڵ�����綯�Ƶ��ڶ��ӵ�ѹ����ֵ����ͨ��Ӧ�����ѹʸ��������ѹʸ����ת�ؿ������ͻ������ڡ�������ѹʸ����������ת�أ���ת��Ҫ���������������ѹʸ����
��ֱ��ת�ؿ��ƿ����㷨�����������ڸ���״̬ʱ�����ڵ���������ص㣬Ӧ�����ȿ��Ǵ������ٶ�����ת�ظ��١�����ijһʱ�̵�ѹ����ʸ����us,d��us,q��ɱ������ʽ(6)��֪��ֻ��us,d�Դ�����Ӱ�졣��us,d��0ʱ���������ӣ�us,d��0ʱ��������С��us,q������Ӱ�춨�Ӵ�����Ƶ�ʣ����һ�Ӱ��ת��(ͨ��ת�ӽ��ٶ�)���ڵ���ȶ�����״̬�£���ʽ(8)�� (9)�ã�
![]() (14)
(14)
![]() (15)
(15)
��ʽ(14)��(15)����ʽ(13)�ɵã�
![]() (16)
(16)
��ʽ(15)��(16)��֪����![]() ʱ��ת��T���ӣ����ǣ����������������ӡ�ʵ���ϣ���ʽ(7)��֪������1�������Ķ��Ӵ��������Ӵ������ٶ���q�����ϵĵ�ѹ��ء�
ʱ��ת��T���ӣ����ǣ����������������ӡ�ʵ���ϣ���ʽ(7)��֪������1�������Ķ��Ӵ��������Ӵ������ٶ���q�����ϵĵ�ѹ��ء�
������Ķ��Ӵ�����ֵΪ��ֵ����![]() ʱ�����ת�ش������ֵ��
ʱ�����ת�ش������ֵ��
![]() (17)
(17)
��Ӧ�Ķ��Ӵ���ת��Ƶ��Ϊ��
![]() (18)
(18)
������ʵ��Ӧ���ж��Ӵ���ת��Ƶ��һ�����![]() ����ʵ��ת�ػ����ʽ(17)��ʾ�ĵ��ת�����ֵ��
����ʵ��ת�ػ����ʽ(17)��ʾ�ĵ��ת�����ֵ��
��ֱ��ת�ؿ���ϵͳ�У�����1�������Ķ��Ӵ���![]() ����
����![]() ʱ�������ת�شﵽ����ڸ���״̬�£����ڶ��ӵ�ѹ���㣬����
ʱ�������ת�شﵽ����ڸ���״̬�£����ڶ��ӵ�ѹ���㣬����![]() ���ﵽ
���ﵽ![]() �����������1�������Ĵ���ֵ�������ܻ������ת�������
�����������1�������Ĵ���ֵ�������ܻ������ת�������
���ǵ����Ź������ٶȺܿ죬�ᵼ��ת�ظ������ֵ���Ӷ���ɵ�����в��ȶ�����ת��Ҫ��һֱ�����㣬�����Ķ��Ӵ������ϵؼ�С��ֱ�����ֹͣ���С�Ϊ�˷�ֹ����������������ǵ����ת��������![]() ��ת�ظ���ֵӦ�ò�����
��ת�ظ���ֵӦ�ò�����![]() ��
��
![]() (19)
(19)
ͬʱ��Ϊ�˱�֤���ӵ��������������ֵ��ת�ظ���ֵ���ܸ���![]() ��
��
![]() (20)
(20)
ʽ�У�TratedΪ�ת�ء�
��֮��ת�ظ���ֵ![]() Ӧ�����������������
Ӧ�����������������
![]() (21)
(21)
2.2 �����δ����켣����
���ŵ��ת�����ߣ�������Ŀ���Ƶ����Ӧ���ӡ�Ϊ�˽�����Ƶ��������һ����Χ֮�ڣ�ͨ�������ſ����в��������δ����켣����������������δ����켣��ʽʱ��6��������ѹ�ռ�ʸ��������������(��ͼ3��ʾ)��ͼ3��ʵ��ʸ����ͷ����ǰ��Ϊ˳ʱ�ӷ�������ʸ����ͷ����ǰ��Ϊ��ʱ��ʱ�ӷ������Ӵ�����ֵ����ֵ֮���ڶ��Ӵ����ͻ�������ʱ����ѡ���������ת����һ�µĵ�ѹʸ��������ѡ���෴������ת��ʸ�������ӵ�ѹ�ռ�ʸ����ѡ�����1��ʾ��
2.3 ���Ÿ����Ŀ���
����ǰ��ķ�����֪��������һ����ʼ�Ĵ�������ֵ![]() ʱ����
ʱ����![]() ���������ʹﲻ��Ҫ���ת�أ���Ӧ�ĵ��ת��Ҳ�ʹﲻ������ֵ����ˣ����ת�ٱ仯��Ϊ���ſ����ṩ������Ϣ���о���Ϊ�����õ��ת�ٶԶ��Ӵ������п��ơ����ǵ���������е�ijһ�ٶ�ʱ(����ٶȿ���С�ڶ�ٶȣ�Ҳ�п��ܴ��ڶ�ٶȣ�������ʵ���������)����������ٶ���ȻС�ڸ���ת�٣�������������ͬ�ķ��������Ե���������ţ�ת�ؾͲ��ܴﵽҪ���ٶȲ��ܼ�������������ת�ٽ����ȶ��ڸ��ٶȸ��������Ұ���ϴ�IJ�����Ϊ�˻�ȡ���ߵ��ٶȣ�������������ſ����㷨�Ǹ���ת��Ҫ���Ƿ�����(ת�� �ͻ����)�������첽�綯���Ķ��Ӵ���
���������ʹﲻ��Ҫ���ת�أ���Ӧ�ĵ��ת��Ҳ�ʹﲻ������ֵ����ˣ����ת�ٱ仯��Ϊ���ſ����ṩ������Ϣ���о���Ϊ�����õ��ת�ٶԶ��Ӵ������п��ơ����ǵ���������е�ijһ�ٶ�ʱ(����ٶȿ���С�ڶ�ٶȣ�Ҳ�п��ܴ��ڶ�ٶȣ�������ʵ���������)����������ٶ���ȻС�ڸ���ת�٣�������������ͬ�ķ��������Ե���������ţ�ת�ؾͲ��ܴﵽҪ���ٶȲ��ܼ�������������ת�ٽ����ȶ��ڸ��ٶȸ��������Ұ���ϴ�IJ�����Ϊ�˻�ȡ���ߵ��ٶȣ�������������ſ����㷨�Ǹ���ת��Ҫ���Ƿ�����(ת�� �ͻ����)�������첽�綯���Ķ��Ӵ���![]() ����ͼ4��ʾ��
����ͼ4��ʾ��
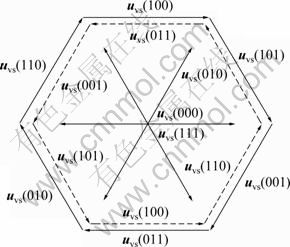
ͼ3 �������ε�ѹ�ռ�ʸ��
Fig.3 Hexagonal voltage space vector
��1 �����δ������ر�
Table 1 Switch table of hexagonal flux

��ͼ4��֪����ת���ͻ��Ƚ��������CT����N��(һ��Ҫ����10��)Ϊ1ʱ������ʱ��ֻ�й�����ѹ����ת��Ҫ���δ���㣬˵�����Ӵ�������ֵ����ʵ��ֵ����Ҫ��С�������෴�������������ڳ��ֹ�����1�����ѹ����ζ��ת��Ҫ���Ѿ����㣬��Ҫ�������Ӵ�������ֵ��

ͼ4 ��������ʾ��ͼ
Fig.4 State diagram of flux regulation
��֮�����㷨�Ļ���ԭ�������ҵ����Ŵ�������֤�����ܴ�����ת�ء���Ȼ����������ֵ���ܵ���![]() ��Ҳ���ܸ��ڶ����
��Ҳ���ܸ��ڶ����![]() ��ͼ4��ʾ���㷨��֤�������ٶȷ�Χ�ڴ�������ȷ������ͬʱ����Ҫ���ӵĴ�������͵��������
��ͼ4��ʾ���㷨��֤�������ٶȷ�Χ�ڴ�������ȷ������ͬʱ����Ҫ���ӵĴ�������͵��������
2.4 ���ٶȶε�ƽ�ȹ���
Ϊ�˱�����Բ�δ����Լ������δ���֮���л����ֵ�����壬���IJ����жϹ��ɵķ�������֤���ɵ�ǰ�������ֵ���䣬ʵ����Բ�ι켣�������ι켣֮���ƽ�ȹ��ɡ�
��ת���ͻ��Ƚ����������N��Ϊ1ʱ�������Ҫ��С�����Ա�֤�����������У������Ӵ������е������ζ���ʱ���������л�Ϊ�����ι켣��ͬ��������������ŷ�Χ���ٵ����ٷ�Χʱ�������жϴ�������ֵ�Ƿ���ڶ�����������ڣ��켣���е������ζ���ʱ���л���Բ�ι켣�������ڱ�֤���л�ʱ������ֵ�����ƽ�������ͬʱ�����ݴ�����ֵ�Լ�ת���ͻ��Ƚ�����������л�������жϣ���ˣ��㷨��ü�
3 ϵͳ���漰�������
�첽�綯��ֱ��ת�����ſ��Ʒ���ģ����ͼ5��ʾ���첽����������£���������Ϊ37 kW����ѹΪ429 V�������迹Ϊ0.092 1 W��ת��©��Ϊ0.753 3 mH������©��Ϊ0.723 5 mH������Ϊ27.075 8 mH��������Ϊ3��ת������Ϊ0.6 kg��mm���ת��Ϊ787 r/min������ת��100 N��m��ͼ6~9��ʾ�ֱ�Ϊ���Ӵ����켣��ת��ת�١����ת���Լ����ӵ������Ρ�ͼ6��Բ�δ����켣�������δ����켣�л�ƽ�������Ҽ�ʱ��֤�˵�����ȶ����С���ͼ7��ͼ8�ɼ�����tΪ0~0.4 sʱ��������е���ٶȣ����ת�ر��ֲ��䣻��t=0.4 s�����ڵ�����ת�����Լ�С��������ת�غ㶨����ˣ�������ٶȼ�С�����ǣ���Ȼ�ԽϿ���ٶȴﵽ1 600 r/min���ȶ����С���ͼ9�ɼ���t=0.4 sʱ�����ӵ����л�����������������������������������й����е����������ڵ��������Χ֮�ڡ��ɼ������ĸ��������ſ��Ʋ����ܹ�ʵ�ֵ�����������ٶȿ��ƣ������Ž��������ת�����У��������ֵ�����������������������ƽ�ȣ���������������Ҫ��ȷ�ĵ���������ܹ�ʹ����ȶ����У���ֹ�����������ֵ��

ͼ5 �첽���ֱ��ת�����ŷ���ģ��
Fig.5 Simulation model of induction DTC system in flux-weekening area

ͼ6 ���Ӵ����켣
Fig.6 Trajectory of stator flux

ͼ7 ת����ʱ��Ĺ�ϵ
Fig.7 Relationship between motor speed and time

ͼ8 ���ת��T����
Fig.8 Relationship between output torque and time
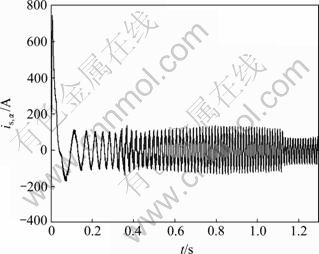
ͼ9 ���ӵ�������
Fig.9 Relationship between stator current and time
4 ����
(1) ���һ���첽���ֱ��ת�ؿ���ϵͳ���Ӵ������ſ��Ʒ�����ʹ������������й�������������ܴ��ת�ء��ڶ��Ӵ����������ٵĹ����У�ʹ���Ӵ�������ֵ��ת�����仯��ֻҪͨ������Ϳ�ʵ�ֺ�ת�غͺ㹦�������ƽ�����ɣ���֤����ܹ���������ܴ��ת�ء�
(2) ������ķ�������Ҫ��ȷ�ĵ����������ô�������ֵҲ����Ҫ���ӵļ��㡣�㹦�ʺͺ�ת����������֮���ת������Ҫ�����л��ٶȡ��÷���������첽����������������ܾ��кܺõ�Ч����
�ο����ף�
[1] ����, �ܱ���, ���컪, ��. �綯�����ø�Ӧ������������ת�������[J]. ������ͨ��ѧѧ��, 2009, 43(4): 62-66.
LONG Bo, CAO Bing-gang, HU Qing-hua, et al. Maximum torque control strategy in field-weakening region of induction motors for electric vehicles[J]. Journal of Xi��an Jiaotong University, 2009, 43(4): 62-66.
[2] Kim S H, Sul S K. Maximum torque control of an induction machine in the field weakening region[J]. IEEE Transactions on Industry Applications, 1995, 31(4): 787-795.
[3] Tripathi A, Khambadkone A M, Panda S K. Dynamic control of torque in overmodulation and in the field weakening region[J]. IEEE Transactions on Power Electronics, 2006, 21(4): 1091-1098.
[4] ��÷, ���¶�, ���, ��. ˫������任�������첽�綯�������Է���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(4): 658-663.
SU Mei, XU Xin-dong, LI Dan-yun, et al. Performance analysis of two-stage matrix converter driven asynchronous motor[J]. Journal of Central South University: Science and Technology, 2005, 36(4): 658-663.
[5] �ɹ���, ����, ������, ��. ����ģ��DSVM���Ʋ��Ե��첽���ֱ��ת�ؿ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(1): 166-171.
XI Guo-hua, ZHANG Yan-cun, HU Wei-hua, et al. Direct torque control of induction motors based on fuzzy DSVM strategy[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 166-171.
[6] Sanghoon K, Seungki S. Maximum torque control of an induction machine in the field weakening region[J]. IEEE Transactions on Industry Applications, 1995, 31(4): 787-794.
[7] Sanghoon K, Seungki S. Voltage control strategy for maximum torque operation of an induction machine in the field-weakening region[J]. IEEE Transactions on Industrial Electronics, 1997, 44(4): 512-518.
[8] Casadei D, Casadei D, Tani A, et al. A robust method for field weakening operation of induction motor drives with maximum torque eapabihty[C]//Proceeding of the 2006 IEEE Industry Applications Conference 41st Annua Meeting. Tampa, FL, USA, 2006: 111-117.
[9] Xu X, Novotny D W. Selection of the flux reference for induction machine drives in the field weakening region[J]. IEEE Transactions on Industry Applications, 1992, 28(6): 1353-1358.
[10] Kim S H, Su S K. Voltage control strategy for maximum torque operation of an induction machine in the ?eld weakening region[J]. IEEE Transactions on Industry Applications, 1997, 44(4): 512-518.
[11] Takahashi I, Noguchi T. A new quick-response and high efficiency control strategy of an induction machine[J]. IEEE Transactions on Industry Applications, 1986, 22(5): 820-827.
[12] Casadei D, Grandi G, Serra G, Tani A. Switching strategies in direct torque control of induction machines[C]//Proceedings of International Conference on Electrical Machines. Paris, France, 1994: 204-209.
[13] Tiitinen P, Pohjalainen P, Lalu J. The next generation motor control method: Direct Torque Control (DTC)[C]//Proceedings of the 1996 International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth. New Delhi, India, 1996: 37-43.
[14] Casadei D, Serra G, Tani A. Improvement of direct torque control performance by using a discrete SVM technique[C]//Proceedings of Power Electronics Specialist Conference. Fukuoka, Japan, 1998: 997-1003.
[15] Casadei D, Serra G, Tani A, et al. A simple method for flux weakening operation of DTC based induction motor drives[C]// Proceedings of 16th International Conference on Electrical Machines. Krakow, Poland, 2004: 403-408.
[16] Casadei D, Serra G, Tani A, et al. A robust method for flux weakening operation of DTC induction drive with on-line estimation of the break-down torque[C]//Proceedings of 2005 IEEE 11th European Conference on Power Electronics and Applications. Dresden, Germany, 2005: 1-9.
(�༭ ������)
�ո����ڣ�2010-12-18�������ڣ�2011-03-10
������Ŀ��������Ȼ��ѧ����������Ŀ(60574030)���������Ƽ��о�������Ŀ(2011J010-E)
ͨ�����ߣ�������(1940-)���У������ϲ��ˣ����ڣ���ʿ����ʦ����������Ӧ���ƺ��ӻ���ϵͳ�Զ����о����绰��0731-88836739��E-mail: s-yushouyi@sina.com
ժҪ�����һ�ֻ������ת�ؿ��Ƶ����ſ��Ʒ����������첽���ֱ��ת�ؿ��Ƶ��������У������˼���������Žβ��������δ����켣��ʹ��������ֵ����ת�ر仯�����Է�������ת�ظ���ֵ�����÷�������Ҫ��ȷ���첽������в�������ʵ���������з�ʽ������˳���ƽ�����ɡ����������й����н����Ӵ�������ֵ�������趨���䣬�ڲ�ͬ���ٶ������Ķ��Ӵ�������ֵ������Ҫ���Ӽ��㡣�������������첽���ֱ��ת�ؿ���ϵͳ���������ٺͽ��ٹ����е��������ܵõ����ƣ����������е�ͬһ�ٶ�ʱ���������ٻ��ٹ��������ת��С����ʱ�䳤������õ���Ч����������δ�����Բ�δ���֮���ܹ�ƽ�����ɡ�
