
DOI: 10.11817/j.issn.1672-7207.2017.05.015
��Ŀ�궨λ���ƶ��ű긨���ľ�������·���
������1, 2������3���ܲ�1, 2������1, 2
(1. �й���ҵ��ѧ ��Ϣ����ƹ���ѧԺ������ ���ݣ�221008��
2. ��ɽ������Ӧ�ü������ҵط����Ϲ���ʵ���ң����� ���ݣ�221008��
3. �����������ü����о�Ժ ���ݿ���������ģ����� ���ݣ�221005)
ժ Ҫ��
�Կ�Ŀ�궨λ���ȵ�Ӱ�죬���һ���ƶ��ű긨���ľ�����Ʒ���MBDisEst���÷����ɰ�װ�йߵ��豸��/�ͼ��ⶨλװ�õ���Ա��䵱�ƶ��ű꣬����ͨ�����ɽ�������е������豸������ϢУ�������ꡣMBDisEst���ƶ��ű��Ŀ��ڵ�֮�������˶��ͼ���Լ��Ϊ���������ü�Ȩ��С���˷�����Ŀ��ڵ��������ű�ľ��룬�ɽ���ֹ���˶�Ŀ��ľ������ͳһ��ͬһ��ܡ�������������MBDisEst�IJ�ྫ�ȱ�TOA�IJ�ྫ�ȸߣ�����������ƶ��ű��ٶȵ�������������ƶ��ű�ͨ�Ű뾶�����Ӷ���С������MBDisEst�Ķ�λ�������нϸߵĶ�λ���ȡ�
�ؼ��ʣ�
�ƶ��ű긨������Ŀ�궨λ�������������λ������
��ͼ����ţ�TD676 ���ױ�־�룺A ���±�ţ�1672-7207(2017)05-1227-07
A novel distance estimation method for target localization in coal mine assisted by mobile beacons
HU Qingsong1, 2, GENG Fei3, CAO Can1, 2, ZHANG Shen1, 2
(1. School of Information and Control Engineering, China University of Mining & Technology, Xuzhou 221008, China;
2. The National and Local Joint Engineering Laboratory of Internet Application Technology on Mine,
China University of Mining & Technology, Xuzhou 221008, China;
3. Xuzhou Center of Survey and Design, State Power Economic Research Institute, Xuzhou 221005, China)
Abstract: To mitigate the affection of the inaccurate distance measurement on the accuracy of the localization system in coal mines, an improved distance estimation method assisted by mobile beacons called MBDisEst was proposed. Some gas inspectors and mining cars equipped with inertial navigation equipment or/and laser positioning devices were selected as mobile anchors, which communicated with other devices for Internet of mine things to calibrate their own coordinates. MBDisEst computed the distances between target nodes and virtual anchors using weighted least square method based on their relative motion and geometrical restriction, and combined static and mobile target scenarios into a unified framework. The simulations show that the distance measurement accuracy of MBDisEst is larger than TOA��s, and the measurement error grows up with the speed of mobile anchors and goes down with the communication range of mobile anchors. And the localization methods based on distance measurement of MBDisEst has larger accuracy.
Key words: assistance of mobile beacons; target localization in coal mine; distance measurement; localization accuracy
��Ŀ�궨λϵͳ������ú����ҵ�����ص�����Դ���ڿ��ѷ���ʱ����ȷ��������Աλ��[1-2]����ú������䱸�İ�ȫ������ʩ֮һ�����ڲ��Ķ�λ�������ڶ�λ���ȱȷDz��Ķ�λ������[3]���ǿ�Ŀ�궨λ�������������о��ȵ�[4]�����ǣ������ܵ��źŴ�������[5]�����ԭ��[6]�����ص����ƣ�Ŀǰ�Ŀ�λϵͳ�IJ�ྫ���ձ�ϵͣ��Ӷ������˶�λ���ȵ���ߡ��ƶ��ű긨���IJ������Դ�������ű�ڵ�����Ҫ�����߶�λ����[7-8]������ǰ���о�һ����Ϊú��������Ӧ���ƶ��ű긨���Ķ�λ��������Ϊ�ƶ��ű���Ҫ��Ϊ��ȷ��λ�ã������½ڵ�������ʹ��GPS���豸��ʵʱ��ȡ����λ�ý�Ϊ���ѡ�ʵ���ϣ���Щ�䱸�ߵ��豸��/�ͼ��ⶨλװ�õ���Ա(����Ա)��/���豸(��ﳵ)�ǿ��Գ䵱�ƶ��ű�ġ�Ϊ�ˣ������������һ���ƶ��ű긨���Ŀ�Ŀ�������Ʒ���(enhanced distance estimation method for coal mine assisted by mobile beacons��MBDisEst)�������ƶ��ű���˶������ж�λϵͳ������ǿ��������ֻ�����������豸����������ж�λϵͳ���ȣ�������㣬�����ɱ�������
1 ��������
1.1 �ƶ��ű긨���Ŀ�λϵͳģ��
Ŀ�궨λ�Ļ���ԭ���Ǹ���ij�ֲ���(��ඨλ)���������˽ṹ(�Dz�ඨλ)����Ϣ���������Ƿ������߷���λ�ù����㷨ȷ��Ŀ��ڵ�λ��[9]�����ݶ�λ����Ҫ���ɶԶ�λ�����һ���Ż�[10]��
�ڿ�����Ҫʹ�ò�ඨλ�����о�Ŀ���������ƶ��ű���ǿ���ж�λϵͳ�IJ��ȷ�ȣ�������߶�λ���ȡ����ܹߵ��豸���ƶ��ű�����˶��������γ�����ۻ�[11]�����ǵ�������λ����֪���豸��ʱ����Եõ�У�����磬���ƶ��ű꾭��RFID(radio frequency identification)��λϵͳ[12]�Ķ�������WSN (wireless sensor networks)��λϵͳ[13]���ű�ڵ��WiFi(wireless fidelity)��λϵͳ[14]��AP(access point)ʱ���Ϳ���������Щ�̶��ڵ��λ�ö������������У��Ŀǰ����ɽ����������δ�����ڿ�ɽ�������ܹ��£��ƶ��ű��������豸��ϵͳ���й㷺�ġ���-����������ϵ��ͨ�������������塱����Ϣ������������У����ȫ���еġ�
�ٶ����п�λϵͳ����WiFi����[15]���ɹ̶���װ������е�AP(��λ��վ���ٶ�������������߲���)��Ŀ����Я����λ��ǩ(Ŀ��ڵ�)���ɣ���ͼ1��ʾ����Ա�Ͳ��ֿ�װ�ߵ��豸��/�ͼ��ⶨλװ�ã����ǿ����ڳ�ʼλ�û�þ�ȷ��λ����Ϣ��������ͨ�����ⶨλװ�û�λ��վ���ۼ������������Խ������ƶ��ű����˶�������������ΪT�㲥�Լ���λ����Ϣ��Ŀ��ڵ���ո���Ϣ����������Ϣ���ƶ��ű��˲ʱλ����Ϊһ�������űꡣ

ͼ1 �ƶ��ڵ㸨���Ŀ�λϵͳʾ��ͼ
Fig. 1 Schematic diagram of localization system for coal mine assisted by mobile anchors
1.2 �ƶ��ű긨���ľ������ģ��
ͼ2��ʾΪ�ƶ��ű��γɵ������űꡣ��һ���ƶ��ű�Ϊ�������㷨ԭ��������ƶ��ű����������������ơ��ٶ��������Ϊw���ƶ��ű��ͨ�ž���Ϊr������������ٶ�Ϊv������ֱ���˶�����ͼ2��Ŀ��ڵ���봦���ƶ��ű�ĸ��Ƿ�Χ�ڷ��ɽ��յ�λ�ù㲥��Ϣ����Ȼ�������ű�ĸ���Բֱ���������w����ʵ�ֶ������ȫ���ǣ���w��2r��
Ϊ�˱�֤�����ű�������ȫ���ǣ��ƶ��ű��λ����Ϣ�㲥����TҲ����Ҫ����һ������������ͼ2�е�ֱ�������Ρ�B1OQ(���У�QΪ���������ű�ĸ���Բ�Ľ��㣬OΪQ���ƶ��ű��˶��켣�ϵ�ͶӰ)��Ϊ��ʵ��ȫ���ǣ��������� ����
����
 (1)
(1)
����w��2r�����ʽ(1)�ұߵĿ��������ܹ����㡣
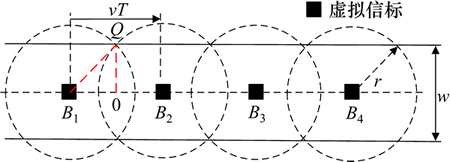
ͼ2 �ƶ��ű��γɵ������ű�
Fig. 2 Virtual anchors produced by mobile anchors
ͼ3��ʾΪ���������ű�ľ�ֹĿ��������ģ�͡��������խ��Ŀ��ڵ��ڿ���ά(ͼ3�е�������)�ϵ����岻����ֻ̽�ֳ���ά(ͼ3�еĺ�����)�ϵ�λ�ñ仯�����ڿ�Ŀ����ԣ�Ŀ��ڵ�������2����2�����ϵ������ű���Ϣ������ʵ�ֶ�λ������ٶ�Ŀ��ڵ�Nu����N�������ű�ķ�Χ�ڣ��������յ�N�������ű���ź�(��ͼ3��ʾ[16])��

ͼ3 ���������ű�ľ�ֹĿ��������ģ��
Fig. 3 Distance estimation model of static target based on virtual anchors
��Ŀ��ڵ㵽N�������ű�֮��IJ��������ƽ��Ϊ ����ʵ�����ƽ��Ϊ
����ʵ�����ƽ��Ϊ ��������ƾ�������֪r������������ʵ����Ĺ���ֵ
��������ƾ�������֪r������������ʵ����Ĺ���ֵ ��
��
2 �ƶ��ű긨���ľ������
2.1 ��ֹĿ��ڵ�ľ������
�ȿ��Ǿ�ֹĿ��ڵ�ľ������(ͼ3)����ͼ3�У� Ϊ
Ϊ ���ƶ��ű��˶��켣�ϵĴ��㣬����֮��ľ���
���ƶ��ű��˶��켣�ϵĴ��㣬����֮��ľ��� �������ҷ��������ű�(��n��i��N���ļ��㷽������)����������������ű�Bn���ľ���Ϊ
�������ҷ��������ű�(��n��i��N���ļ��㷽������)����������������ű�Bn���ľ���Ϊ ����Ȼ�������ű�Bi�봹���ľ���Ϊ
����Ȼ�������ű�Bi�봹���ľ���Ϊ ����ˣ�
����ˣ�
 (2)
(2)
���� ��
�� ��
�� ��
��
ʽ(2)�ľ�����ʽΪ
 (3)
(3)
����
 ��
�� ��
��
�������ֲ����������ٶ�����ڲ��������TOA��λҪ���շ��ڵ�֮����о���ʱ��ͬ�����������ͬ�����ͻ�����������ˣ���������ɱ�ʾΪ ��
�� ΪĿ��ڵ㵽�����ű�Bi֮��IJ�������Ӿ�ֵΪ0������Ϊ
ΪĿ��ڵ㵽�����ű�Bi֮��IJ�������Ӿ�ֵΪ0������Ϊ ����̬�ֲ������ǣ������������ɸ�дΪ
����̬�ֲ������ǣ������������ɸ�дΪ
 (4)
(4)
����Сʱ�� ����ˣ�����������Ϊ[17]
����ˣ�����������Ϊ[17]
 (5)
(5)
�ü�Ȩ��С���˷�(weighted least square, WLS)���Ƴ� ��Ϊ
��Ϊ

 (6)
(6)
����
 (7)
(7)
���ǣ��ɵù��ƾ���Ϊ
 (8)
(8)
ע�⣺����di��δ֪�ģ���ʵ�ʼ����������ri���档
CRLB(Cramer-Rao Lower Bound)������������ƫ���Ƶķ����½磬����ΪFisher��Ϣ����Jv���档����
 (9)
(9)
���ǣ�CRLB����Ϊ
 (10)
(10)
2.2 �˶�Ŀ��ڵ�ľ������
�ٶ�Ŀ��ڵ��λ��P1��ʼ�����ٶ� ��x����������ֱ���˶�����(i-1)Tʱ���˶���Pi����ͼ4��ǰ���Ѿ������ƶ��ű���˶��ٶ�Ϊv�������һ���ٶ��ƶ��ű���Ŀ��ڵ���˶�������ͬ���˶������෴����������������ơ�Ŀ��ڵ�������2����2�����ϵ������ű���Ϣ������ʵ�ֶ�λ��
��x����������ֱ���˶�����(i-1)Tʱ���˶���Pi����ͼ4��ǰ���Ѿ������ƶ��ű���˶��ٶ�Ϊv�������һ���ٶ��ƶ��ű���Ŀ��ڵ���˶�������ͬ���˶������෴����������������ơ�Ŀ��ڵ�������2����2�����ϵ������ű���Ϣ������ʵ�ֶ�λ��
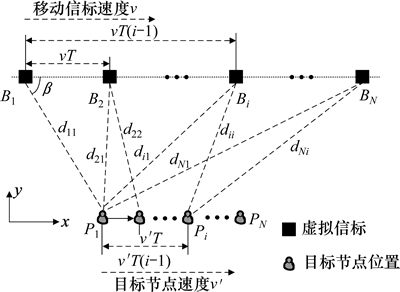
ͼ4 ���������ű���˶�Ŀ��������ģ��
Fig. 4 Distance estimation model of mobile target based on virtual anchors
��ͼ4�У������ű�Bi��Ŀ��ڵ�λ��Pi�ľ���Ϊdi������ֻ�д���B1��Χ�ڵ�Ŀ��ڵ�����յ��ƶ��ű��λ�ù㲥��Ϣ����P1����λ��Bi���Ƿ�Χ֮�⣬��ˣ�ͼ4�е�d11��d21����ֱ�Ӳ�������di1��������ã����DZ�����Ҫ��������⡣���Ƴ�di1���൱����Ŀ��ڵ����½�����Bi�ĸ��Ƿ�Χ���Ӷ�������Ŀ��ڵ����ܻ�õ������ű�����������߶�λ�����������ġ�
Ϊ��ֱ��������������ű�B1��Bi��δ֪�ڵ�λ��P1��Pi֮��ļ��ι�ϵ������ͼ5�У����ų������ڵ���������Ӿ����š���ͼ5�У�����P1��1��ƽ����BiPi�ĸ����ߣ����ƶ��ű�켣(��ֱ��B1Bi)�ཻ�ڵ�M������ ��
��
 ����������
���������� �Լ�
�Լ� �зֱ��������Ҷ����ɵ�
�зֱ��������Ҷ����ɵ�
 (11)
(11)
�ݴ˿��Լ����Ŀ��ڵ��ʼλ��P1�������ű�Bi֮��ľ���Ϊ
 (12)
(12)
���У�v����T��i��d11��dii��Ϊ��֪������Ŀ��ڵ㱣�־�ֹ( )��P1����Pi�ص���ֱ�߶�BiPi��BiP1�˻���ͬһ���߶Σ���ˣ���
)��P1����Pi�ص���ֱ�߶�BiPi��BiP1�˻���ͬһ���߶Σ���ˣ��� ��������ʽ(12)��Ҳ������ˣ����ĵķ����ܹ�����ֹĿ����˶�Ŀ��ͳһ��ͬһ������¡�
��������ʽ(12)��Ҳ������ˣ����ĵķ����ܹ�����ֹĿ����˶�Ŀ��ͳһ��ͬһ������¡�

ͼ5 �˶�Ŀ�������Ƽ�ģ��
Fig. 5 Simplified distance estimation model of mobile target
����ʽ(12)���Ƴ��ľ��� ����ʵ����֮������Ϊ
����ʵ����֮������Ϊ ����
���� ���������Ӿ�ֵΪ0������Ϊ�ĸ�˹�ֲ�������Сʱ����
���������Ӿ�ֵΪ0������Ϊ�ĸ�˹�ֲ�������Сʱ����
 (13)
(13)
ǰ�����������ű���Ŀ��ڵ��ʼλ��P1����ʵ�����ƽ��Ϊ �����ƾ����ƽ��Ϊ
�����ƾ����ƽ��Ϊ �����ǣ��ɽ�ʽ(13)д��
�����ǣ��ɽ�ʽ(13)д��
 (14)
(14)
����
 ��
��
����WLS�����㷨������þ���v�Ĺ���ֵΪ
 (15)
(15)
��ʱ�� Ϊ
Ϊ
 (16)
(16)
��ʵ�ʼ�������У�����di1��δ֪�ģ���ri1���档��ˣ����ƾ���Ϊ
 (17)
(17)
CRLB������ʽ(11)���㡣
3 ���ܷ���
ͨ������ʵ����֤������ľ�����Ʒ���MBDisEst������(�Ծ�����������)�����о���������㷨�Զ�λ���ȵ�Ӱ�졣��������˵�����������õ����Ϊ��5 m����200 m�ij�ֱ������ƶ��ű��ͨ�Ű뾶Ϊ50 m����ʼ����Ϊ(0��0)����5 m/s���ٶ���ֱ���˶���(200��0)����ÿ��1 s�㲥1���ű���Ϣ����ˣ������ű���Ϊ5 m��ÿ��ʵ������1 000�Σ�ȡ���ǵ�ƽ��ֵ��Ϊʵ������
3.1 ��ֹĿ��ľ������
Ŀ��ڵ㴦�ھ�ֹ״̬��ͬʱ����MBDisEst������TOA��෨����MBDisEst������TOA��෨���о�����ƣ������½�CRLB���бȽϣ������ͼ6����ͼ6���Կ�������MBDisEst�����IJ�����������������TOA��෨�ľ��������С�ö࣬���ӽ���CRLB�½硣��ˣ�MBDisEst������Ч���Ͳ�����ܹ�Ϊ��λ���ȵ�����ṩ���ݡ�
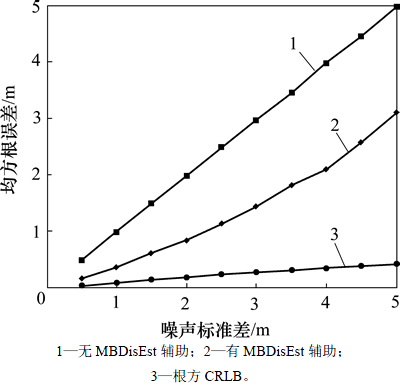
ͼ6 ��ֹĿ��IJ�����
Fig. 6 Distance measurement error of static target
3.2 �˶�Ŀ��ľ������
Ŀ��ڵ㴦���˶�״̬���˶��ٶ�Ϊ0.5 m/s��ʵ������ͼ7����ͼ7���Կ�����MBDisEst���˶�Ŀ����Ȼ���нϺõIJ�����ܣ���������MBDisEst���˶�Ŀ�궨λ�㷨Ҳ���Ի�ýϸߵĶ�λ���ȡ�
3.3 �ƶ��ű��ٶȶԾ�����Ƶ�Ӱ��
Ŀ��ڵ���˶��ٶ�Ϊ0.5 m/s���ƶ��ű�ֱ���2��4��6��8��10 m/s���ٶ���ֱ���˶���(200, 0)�������⣬�ֱ��ƶ��ű��ͨ�Ű뾶����Ϊ30 m��50 m�������ƶ��ű�ͨ�Ű뾶�Բ�ྫ�ȵ�Ӱ�죬ʵ������ͼ8��
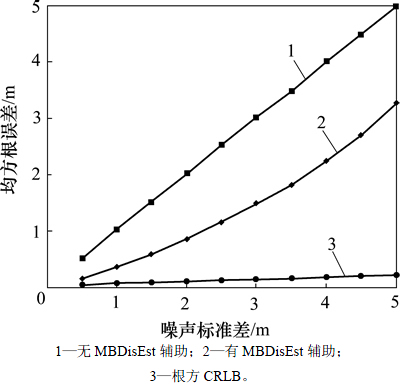
ͼ7 �˶�Ŀ��IJ�ྫ��
Fig. 7 Distance measurement error of mobile target

ͼ8 �ƶ��ű��ٶȶԲ������Ӱ��
Fig. 8 Effect of mobile anchor speed on distance measurement error
��ͼ8���Կ����������������ƶ��ű��ٶȵ������������Ϊ�ƶ��ٶȵ����ӵ��������ű�������ʹ��Ŀ��ڵ��ܹ����յ��������ű���Ŀ���٣�������Ƶ�������ӡ����⣬�����������ƶ��ű�ͨ�Ű뾶�����Ӷ���С����Ϊ�����ƶ��ű��ͨ�Ű뾶�൱���������ܹ�����Ŀ��ڵ�������ű��������Ӷ������˲����
3.4 ��������㷨�Զ�λ���ȵ�Ӱ��
��Ŀ��ڵ������Ϊ ����
���� ������[16-17]
������[16-17]
 (18)
(18)
����
 ��
��
����CWLS(Constrained WLS)�ľ�ֹĿ��ڵ���������ֵΪ[17]
 (19)
(19)
���У� Ϊ�����������ӣ�
Ϊ�����������ӣ� ��ʽ(7)���㣬
��ʽ(7)���㣬 ��
�� ��
��
����CWLS���˶�Ŀ��ڵ���������ֵͬ������ʽ(19)��ʾ��������ʱ����ʽ(16)���㣬��
 (20)
(20)
ʽ(19)�û���MBDisEst�IJ��������CWLS��λ�����ﲻ����ΪMB-CWLS�������ڴ�ͳ����(��RSSI��TOA�ȣ�������TOAΪ��)ֱ�ӳ�ΪCWLS���������������3.2���е���ͬ�������ͼ9����ͼ9���Կ�����MB-CWLS�Ķ�λ���Ȼ��ڴ�ͳ�����Ķ�λ���С��Ҳ���Ƕ�λ���ȸ��ߣ�����Ҫ������MBDisEst��TOA�IJ�ྫ�ȸߡ�

ͼ9 ��������㷨�Զ�λ����Ӱ��
Fig. 9 Effect of distance measurement methods on localization error
4 ����
1) ���һ���ƶ��ű긨���Ŀ�Ŀ�������Ʒ���MBDisEst����װ�ߵ��豸��/�ͼ��ⶨλװ�õ���Ա��䵱�ű�ڵ㣬�����ڳ�ʼλ�û�þ�ȷ��λ����Ϣ�������й��������ɽ�������е������豸������Ϣ��������У��
2) MBDisEst���ƶ��ű��Ŀ��ڵ�֮�������˶��ͼ���Լ��Ϊ���������ü�Ȩ��С���˷�����Ŀ��ڵ��������ű�ľ��룬��ֹĿ����˶�Ŀ���ͳһ��ͬһ����ܡ�
3) MBDisEst�IJ�ྫ�ȱ�TOA�IJ�ྫ�ȸߣ����������ƶ��ű��ٶȵ�������������ƶ��ű�ͨ�Ű뾶���������С��
4) ����MBDisEst�Ķ�λ��������λ���ȵ���ʹ��TOA���Ķ�λ����С������λ���ȸ��ߡ�
�ο����ף�
[1] �Ǹ���, ������. �ű�ڵ���ʽ����ľ������ߴ��������綨λ�㷨[J]. ú̿ѧ��, 2010, 35(7): 1229-1233.
QIAO Gangzhu, ZENG Jianchao. Localization algorithm of beacon nodes chain deployment based on coal mine underground wireless sensor networks[J]. Journal of China Coal Society, 2010, 35(7): 1229-1233.
[2] ������, ������, ����, ��. ú�����涨λWSN�IJ������ܺķ���[J]. �й���ҵ��ѧѧ��, 2014, 43(2): 351-355.
HU Qingsong, WU Lixin, ZHANG Shen, et al. Placement of positioning WSN in coal face and energy consumption analysis[J]. Journal of China University of Ming & Technology, 2014, 43(2): 351-355.
[3] CHEN Changwen, WANG Yu. Chain-type wireless sensor network for monitoring long range infrastructures: architecture and protocols[J]. International Journal of Distributed Sensor Networks, 2008, 4(4): 287-314.
[4] ���ƽ, ���. ���ڿ������˲���ָ�ƶ�λ�Ŀ�TOA��λ����[J]. �й���ҵ��ѧѧ��, 2014, 43(6): 1127-1133.
SUN Jiping, LI Chenxin. Mine TOA of arrival positioning method based on Kalman filtering and fingerprint positioning[J]. Journal of China University of Mining & Technology, 2014, 43(6): 1127-1133.
[5] GUO Yao, HUANG Kaide, JIANG Nanyong, et al. An exponential-rayleigh model for RSS-based device-free localization and tracking[J]. IEEE Transactions on Mobile Computing, 2015, 14(3): 484-494.
[6] YANG Tao, WU Xiaoping. Accurate location estimation of sensor node using received signal strength measurements[J]. International Journal of Electronics and Communications, 2015, 69(4): 765-770.
[7] HU Qingsong, WU Lixin, GENG Fei, et al. A data transmission algorithm based on dynamic grid division for coal goaf temperature monitoring[J]. Mathematical Problems In Engineering, 2014(2014): 1-8.
[8] ����. �����ߴ��������綨λ�����о�[D]. ����: �й���ҵ��ѧ��Ϣ���������ѧԺ, 2015: 37-49.
GENG Fei. Research on wireless sensor network positioning technology in underground coal mine[D]. Xuzhou: China University of Mining and Technology. School of Information and Control Engineering, 2015: 37-49.
[9] MUTHUKRISHNAN K, LIJDING M, HAVINGA P. Towards smart surroundings: enabling techniques and technologies for localization[C]// THOMAS S, CLAUDIA L P. Location and context awareness. Berlin: Springer, 2005: 209-227.
[10] LEE J, CHUNG W, KIM E. A new kernelized approach to wireless sensor network localization[J]. Information Sciences, 2013, 243(2013): 20-38.
[11] HARLE R. A survey of indoor inertial positioning systems for pedestrians[J]. IEEE Communications Surveys & Tutorials, 2013, 15(3): 1281-1293.
[12] �ų�ɭ, ����, ���㳬, ��. ����RFID�Ŀ���Ա��λϵͳ���[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2009, 28(6): 742-746.
ZHANG Changsen, LI Geng, WANG Xiaochao, et al. Design of personnel orientation system in mine based on RFID[J]. Journal of Henan Polytechnic University (Natural Science), 2009, 28(6): 742-746.
[13] ������, ��־��, ���컪, ��. �����ߴ������������ζ�λ����[J]. �й���ҵ��ѧѧ��, 2010, 39(1): 87-92.
PEI Zhongmin, DENG Zhidong, WU Tianhua, et al. A novel three-phase localization method in coal mine wireless sensor networks[J]. Journal of China University of Mining & Technology, 2010, 39(1): 87-92.
[14] ���ƽ, ���. ����WiFi�ͼ�ʱ������Ƶ�TOAú����Ŀ�궨λ����[J]. ú̿ѧ��, 2014, 39(1): 192-197.
SUN Jiping, LI Chenxin. TOA underground coal mine target positioning method based on WiFi and timing error suppression[J]. Journal of China Coal Society, 2014, 39(1): 192-197.
[15] MAKKI A, SIDDIG A, SAAD M, et al. Survey of WiFi positioning using time-based techniques[J]. Computer Networks, 2015, 88(2015): 218-233.
[16] KIM E, KIM K. Distance estimation with weighted least squares for mobile beacon-based localization in wireless sensor networks[J]. IEEE Signal Processing Letters, 2010, 17(6): 559-562.
[17] CHEUNG K W, SO H C, MA W K, et al. Least squares algorithms for time-of-arrival-based mobile location[J]. IEEE Transactions on Signal Processing, 2004, 52(4): 1121-1128.
(�༭ �°���)
�ո����ڣ�2016-07-15�������ڣ�2016-09-28
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51204177)�����ҿƼ�֧�żƻ���Ŀ(2013BAK06B05)������ʡ��Ȼ��ѧ����������Ŀ(BK20151148) (Project(51204177) supported by the National Natural Science Foundation of China; Project(2013BAK06B05) supported by the National Science and Technology Support Program; Project(BK20151148) supported by the Jiangsu Provincial Natural Science Foundation of China)
ͨ�����ߣ������ɣ���ʿ�������ڣ����¿�ɽ���������о���E-mail: hqsong722@163.com
ժҪ��Ϊ�˽��Ͳ��Կ�Ŀ�궨λ���ȵ�Ӱ�죬���һ���ƶ��ű긨���ľ�����Ʒ���MBDisEst���÷����ɰ�װ�йߵ��豸��/�ͼ��ⶨλװ�õ���Ա��䵱�ƶ��ű꣬����ͨ�����ɽ�������е������豸������ϢУ�������ꡣMBDisEst���ƶ��ű��Ŀ��ڵ�֮�������˶��ͼ���Լ��Ϊ���������ü�Ȩ��С���˷�����Ŀ��ڵ��������ű�ľ��룬�ɽ���ֹ���˶�Ŀ��ľ������ͳһ��ͬһ��ܡ�������������MBDisEst�IJ�ྫ�ȱ�TOA�IJ�ྫ�ȸߣ�����������ƶ��ű��ٶȵ�������������ƶ��ű�ͨ�Ű뾶�����Ӷ���С������MBDisEst�Ķ�λ�������нϸߵĶ�λ���ȡ�
[1] �Ǹ���, ������. �ű�ڵ���ʽ����ľ������ߴ��������綨λ�㷨[J]. ú̿ѧ��, 2010, 35(7): 1229-1233.
[2] ������, ������, ����, ��. ú�����涨λWSN�IJ������ܺķ���[J]. �й���ҵ��ѧѧ��, 2014, 43(2): 351-355.
[4] ���ƽ, ���. ���ڿ������˲���ָ�ƶ�λ�Ŀ�TOA��λ����[J]. �й���ҵ��ѧѧ��, 2014, 43(6): 1127-1133.
[8] ����. �����ߴ��������綨λ�����о�[D]. ����: �й���ҵ��ѧ��Ϣ���������ѧԺ, 2015: 37-49.
[13] ������, ��־��, ���컪, ��. �����ߴ������������ζ�λ����[J]. �й���ҵ��ѧѧ��, 2010, 39(1): 87-92.
[14] ���ƽ, ���. ����WiFi�ͼ�ʱ������Ƶ�TOAú����Ŀ�궨λ����[J]. ú̿ѧ��, 2014, 39(1): 192-197.
