
��������ģ�͵Ŀ���ģ������Ӧ����������Ƽ�Ӧ��
�˽���1, 2������ϼ2���轭3������3
(1. �廪��ѧ �������ѧ�뼼��ϵ, ������100084��
2. �������չ���ѧԺ��ɽ�� ��̨��264001��
3. �����Ƽ���ѧ �������ͨ�Ź���ѧԺ, ������100083)
ժ Ҫ��
ģ�ǽ�������ģ��ģ����������Ƶ�һ�����ܽ�ģ���������Ⱦ�����������ģ���ƵĹ��̻�ʵ��Ӧ�÷�����ص㣬���ܸ�������֤�ϸߵĿ��ƾ��ȡ�������Դ�����������ʵ��Ӧ���е�ʱ�����ܳ���������ģ����̬������ģ������������ܣ�ͨ����Ч����ģ��״̬����ռ䣬������ʶ����ȡֵ�����Ʒ�Χ����߱�ʶ�㷨��Ч�ʣ������һ���������ģ�͵Ŀ���ģ������Ӧ��������Ʒ������������������֤�˷�������Ч�ԡ�
�ؼ��ʣ�
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0085-05
Design for fast fuzzy adaptive controller based on characteristic model
DENG Jian-qiu1, 2, ZHANG Zheng-xia2, LI Jiang3, LUO Xiong3
(1. Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China;
2. Naval Aeronautical Engineering Institute, Yantai 264001, China;
3. School of Computer and Communication Engineering, University of Science and Technology, Beijing 100083, China)
Abstract: Fuzzy dynamic characteristic modeling is an approach which combines fuzzy logic and characteristic modeling method. It is easy to be used in engineering field which is similar to characteristic modeling method. Meanwhile, it can ensure the control of high precision according to the practical demand. In order to improve the efficiency of identify algorithm, under the architecture of fuzzy dynamic characteristic modeling method, with the help of dividing fuzzy state space to reduce the range of identification parameters, a novel design method for fuzzy adaptive controller based on characteristic modeling is proposed. Simulation experiment verifies the effectiveness of the proposed method.
Key words: characteristic model; fuzzy control; parameter identification
Ŀǰ������������Ӧ���Ʒ�����ʵ�ʹ���Ӧ���У�������������Ҫ��Ϊ���Ի���ƵIJ��������϶ࡢ���������������Ա�֤�����⡣������һ�����һ����Ҫԭ�������н�ģ�Ϳ��������Ծ�ȷ����ѧ����Ϊ��������ģ�����Ҫ��ֿ�������[1]��Ϊ�˷���һ���ѣ�����ѧ������˻��ڶ�������ģ����������������Ӧ���Ʒ�������϶�����ѧ�����Ϳ�������Ҫ��ģ�������ǽ��Զ���ȷ�Ķ���ѧ��������ģ�����ӹ��̻���ģ�Ƕȳ�����Ϊ���ܿ�������ƺ�һЩ�߽������PID�ȵͽ���������ṩ���������ݣ���Ŀǰһ�ֱȽ���ǰ;�Ľ�ģ�Ϳ��Ʒ���[1]������������һЩ���ӷ�����ϵͳ����ʹ��������ģ������������ϵͳʱ����Ҫ��ԭϵͳ��Ӧ�ĸ�ģ�͵��й���Ϣ��ѹ���������ض������У���Ը�ά����ϵͳ��˵��һ���Ѷȡ���ʱ���ɽ��һЩ���ܷ�����������������������ϵͳ������ģ�ͣ������ӷ�����ϵͳ��ģ����̬������ģ�Ϳ��Ʒ�������һ�����波��[2]����ģ����̬������ģ��������£�ȫ�ֶ�̬ģ���Ƕ���ֲ����õͽ�ʱ���ַ���������������ģ�͵�ģ���ƽ�����Ч����������������ģ���Ѷȣ���һ�������ϵͳ���Ƶľ��ȡ�Ŀǰģ����̬������ģ�������ڰ����߳����ٷ����������ǵȸ��ӷ�����ϵͳ�еõ��˳���Ӧ��[3]����Ȼ����ģ����̬����ģ�͵����ܿ��Ʒ�����ʵ��Ӧ���бȽϵ�һ������ģ�������Ƚϸߣ������ʵʱ���ƵĹ������������ʵ�ֹ����е�ʱ���������д���һ���Ż������������������ܽ�������ģ����ʵ������Ӧ���е��ص�����ϣ�����߱�ʶ�㷨Ч�ʵĽǶȳ����������һ���������ģ�͵����Ϳ���ģ������Ӧ��������Ʒ������ڱ�֤�߾��ȿ��Ƶ�ͬʱ�������Ľ��˻�������ģ�͵�ģ�����Ʒ�����ʱ�����ܣ�ͨ���Ե��͵����ڶ���ķ����������Ƚϣ���֤�˸��������Ч�ԡ�
1 ��������ģ�ͺ�ģ����̬����ģ�͵�����Ӧ����
��ν����ģ�ͣ����ǽ�ϱ��ض���Ķ���ѧ�����Ϳ�������Ҫ����н�ģ����ͬ��������������£���������ģ�ͺ�ʵ�ʱ��ض�����������ǵȼ۵�(���ڶ�̬�������ܱ�������������������)�����ȶ�����£��������ȵġ��÷����ܹ���Ч�ؽ��ʹ������������������ٿ�������Ƶ�äĿ�ԣ�Ŀǰ���ں�������ṹ���������������ϵͳ�������Ը����ĸ�������ϵͳ������˲�������Ŀ���ϵͳ��������ȡ�������õķ�����Ӧ�ý����չ���˹�����Ӧ��ǰ��[4-6]��
��������ģ�����У����ڹ����ϳ��������Զ����߽���G(s)��
![]() (1)
(1)
������һ��������ʱ���ַ�������ʾ[4]��
![]() (2)
(2)
�ڴ˻����ϣ��������ά�ָ��ٿ��������ƽ�ָ�����������ֿ������������������ȶ��ͬ�Ŀ�����[4]��
������ҪӦ���˻ƽ�ָ������[3]��
![]() (3)
(3)
���У�![]() ��L1=0.382��L2=0.618����(k)ΪһС������yr(k)Ϊ���������
��L1=0.382��L2=0.618����(k)ΪһС������yr(k)Ϊ���������![]() ��
��![]() ��
��![]() �ֱ�Ϊf1(k)��f2(k)��g(k)�ı�ʶ����ֵ������ͨ��������С�����㷨�����ͶӰ�㷨ʵ�֡��������¶��壺
�ֱ�Ϊf1(k)��f2(k)��g(k)�ı�ʶ����ֵ������ͨ��������С�����㷨�����ͶӰ�㷨ʵ�֡��������¶��壺
����
![]()
������С���˷��������Ϊ��
 (4)
(4)
���У���ʼ��P(0)ѡ��Ϊ�����Խ���
����ͶӰ�㷨�������Ϊ��
![]()
![]() (5)
(5)
����0��a��2��c��0��
ģ����̬������ģ�����Ƕ�һ��������ģ�������ƹ�[6-7]�����ڻ��ֵ�ģ���ӿռ��зֱ���и�Ч������ģ��Ȼ��ͨ�����Լ�Ȩ�ķ�ʽ��Ч���ϣ��γ�ȫ��ϵͳģ��ģ��[8]����ģ����̬����ģ����r��ģ�������������ʽ����[9-10]��
 (6)
(6)
���У�![]() (j=1, 2, ��, p)Ϊģ�����ϣ�
(j=1, 2, ��, p)Ϊģ�����ϣ�![]() Ϊ��������
Ϊ��������![]() (j=1, 2, ��, p)Ϊ�ɲ������
(j=1, 2, ��, p)Ϊ�ɲ������![]() ��
��![]() ��
��![]() Ϊ��ʱ��ϵ����y(k)Ϊ״̬����������ʾ��Ӧģ���Ӽ��ж�Ӧ�ľֲ�����ģ�ͣ�����һ��������ʱ���ַ��̡�
Ϊ��ʱ��ϵ����y(k)Ϊ״̬����������ʾ��Ӧģ���Ӽ��ж�Ӧ�ľֲ�����ģ�ͣ�����һ��������ʱ���ַ��̡�
2 ��������ģ�͵Ŀ���ģ������Ӧ������
������������ģ�����У���ʶ�������õ���2�֣�������С�����㷨�����ͶӰ�㷨�����۲�����һ�ַ�����Ϊ�˱�֤����ʶ�����ھ��ұ仯֮ǰ��������������Ҫ���������ڲ���ʱ����˵�ǡ���ʱ�䡱�ģ���Ҫ���ڱ仯Խ���ҵ�ϵͳ������Ƶ�ʾ�ҪԽ�ߡ���
���⣬�������ձ�ʶ�Ľ���ᱻ�õ������㷨�У���ˣ�ǰ���ᵽ�ġ�ϵͳ�仯���ҳ̶ȡ�ʵ��������Ƶ��ȶ��̶�Ҳ�ǽ�����صġ���������ˡ���̫��ȷ�ı�ʶ������������ˡ���̫ǡ�����������������ܻ�ʹ�����ı�ʶ�������ѣ��������ϵͳ����(����������ķ�����̬���ƣ����������Ԥ���仯�켣���Ӿ��ҵı仯)��
��ˣ�������ģ�͵ı�ʶ�ͺ����Ŀ����㷨�в����������ֶ�����ֹ�����������ȣ��ڿ����㷨����ϣ������˻ƽ�ָ�ϵ��������ҪĿ����ʹ�ÿ�������һ���̶ȼ�С���Լ��ٲ���ȷ�ı�ʶ������ϵͳ��Ӱ�죻��Σ������ڱ�ʶ�Σ��Բ�����Χ����һ�������ƣ�ʹ�䲻��������������Ӷ����⡰���ڴ��ı�ʶ����Կ���������Ӱ�졣��ˣ��ڱ�ʶ�㷨ִ��ǰ����ģ���е�ʱ��������к������������ƣ������ϵͳ�Ŀ�������������Ҫ��
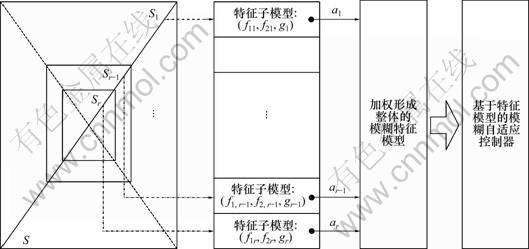
�ڴ�˼��ָ���£�����߱�ʶ�㷨Ч�ʵĽǶȳ�������ģ����̬������ģ�����Ŀ���£������һ���������ģ�͵����Ϳ���ģ������Ӧ��������Ʒ������ڱ�֤�߾��ȿ��Ƶ�ͬʱ�������Ľ��˻�������ģ�͵�ģ�����Ʒ�����ʱ�����ܡ�������Ľṹ��ͼ��ͼ1��ʾ��ͼ1�еķ��Ŷ������£�
![]()
![]() ,
,![]() ��k=1, 2
��k=1, 2
![]() ; k=0, 1, 2 (7)
; k=0, 1, 2 (7)
���У�![]() �DZ�ʾ����ռ�X������ռ�Y֮������һ�������������ɸ���ģ��״̬�ռ��ʱ�����ѡȡ��G0��ʾĿ������ռ䡣
�DZ�ʾ����ռ�X������ռ�Y֮������һ�������������ɸ���ģ��״̬�ռ��ʱ�����ѡȡ��G0��ʾĿ������ռ䡣
ʵ���ϣ������ǰ�����Ŀ������Զ���������ĸ�����������Si��Si�е��±�iԽС������ʾ���������Ŀ����ԽԶ��
һ��أ�����ģ��(ʽ(2))��ʱ�������ȡֵ��Χ��������[1]��
 (8)
(8)
ʽ(7)��aki��bki��ȷ��������ȷ���ķ������ƣ����ǣ�������״̬����ռ�Ļ���Ӱ�죬���ӿռ��ڵ�ʱ�����ȡֵ��Χ��ø��Ӿ�ȷ��������Χ��������ı�խ����С�ˡ���δ��ʶ��ȷ�IJ���ֵ���ġ�����̶ȡ�����С�˱�ʶ���ӽ���ֵ��ʱ�䣬����ʹ�ñ�ʶ�㷨��ִ�н���Ϊ��ݡ�����һ��������ģ�������߱�����������֮һ��
3 ��ֵ����
���������µ�����ϵͳģ��Ϊ������չ����Ա����飺
 (9)
(9)
���У�С������M=1 kg���ڸ�����m=0.1 kg���ڸ˳���l=1 m���ڸ��봹ֱ����ļн�Ϊ![]() ��FΪ����С���ϵ�������xΪ����λ�ƣ��������ٶ�g=9.8 m/s2��ϵͳΪ���壬��Ħ����
��FΪ����С���ϵ�������xΪ����λ�ƣ��������ٶ�g=9.8 m/s2��ϵͳΪ���壬��Ħ����
ͼ1 ��������ģ�͵Ŀ���ģ������Ӧ���Ʒ������
Fig.1 Controlled model of rapid fuzzy adaptive controller based on characteristic model
ģ���������е��ӿ�����ʹ��������ģ�������еĻƽ�ָ�����ɡ�������ģ����ʱ������ı�ʶ��ʹ�ô�ͳ�ĵ���ͶӰ�㷨(ʽ(5))��
���ォģ��״̬����ռ仮��Ϊ3��������Ӧ�ڡ�Զ��Ŀ�����������еȾ��������Լ�������Ŀ������3���֡�
ģ�����ֺ��3���ӿ�������Ӧ�����ĵ�ֱ�ȡΪ��|![]() | =45o��25 o��0 o��
| =45o��25 o��0 o��
3���������У�������ģ�͵�ʱ�������ȡֵ���������·�Χ��
��Ӧģ�����ӵ������ͼ2��ʾ������������£�
(1) ��|![]() |��25oʱ��a1=(25-|
|��25oʱ��a1=(25-|![]() |)/25����|
|)/25����|![]() |��25oʱ��a1=0��
|��25oʱ��a1=0��
(2) ��|![]() |��25oʱ��a2 =|
|��25oʱ��a2 =|![]() |/25����25o��|
|/25����25o��|![]() |��45oʱ��a2=(45-|
|��45oʱ��a2=(45-|![]() |)/20����|
|)/20����|![]() |��45o ʱ��a2=0��
|��45o ʱ��a2=0��
(3) ��|![]() |��25oʱ��a3=0����25o��|
|��25oʱ��a3=0����25o��|![]() |��45oʱ��a3=(|
|��45oʱ��a3=(|![]() |-25)/20����|
|-25)/20����|![]() |��45oʱ��a3=1��
|��45oʱ��a3=1��
ģ��ϵͳ����Ȩ�ϳɵ�����ģ�͵�3��ʱ������ɱ�ʾΪ��
��������ӳ�ʼƫ��45o��ʼ���ԣ�Ϊ�˽�ƫ�ǿ��Ƶ�0.01o֮�ڣ����ڵ�һ����ģ�͵Ŀ��Ʒ�����Ҫ1.04 s������������ģ�͵Ŀ���ģ������Ӧ���Ʒ���ֻ��Ҫ0.76 s������ϸ�ڿɲμ�ͼ3��ͼ3(a)��ʾΪ2�ַ�������������Ч����ͼ3(b)��ʾΪ��3(a)��ԲȦ�궨�IJ��־ֲ��Ŵ���ϸ�ڱȽϽ������ˣ���Ա�ʵ����˵����������ģ�͵Ŀ���ģ������Ӧ���Ʒ���ȡ���˸��õķ�������

ͼ2 ģ�����ӵ����
Fig.2 Membership function of ��

ͼ3 ���ڵ�һ����ģ�͵Ŀ��Ʒ������������ģ�͵Ŀ���ģ������Ӧ��������ϵͳ��Ӧ
Fig.3 System response of single characteristic model controller and rapid fuzzy adaptive controller based on characteristic model
Ϊ��˵����������ģ�͵Ŀ���ģ������Ӧ���Ʒ�������Ч�ԣ������˶�Ӧ��3���ӿ�������ʵ�ʿ��ƽ������ͼ4��ʾ��
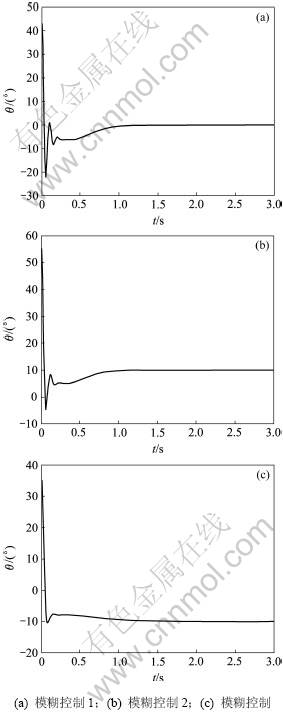
ͼ4 ��������ģ�͵Ŀ���ģ������Ӧ��������3���ӿ�������ϵͳ��Ӧ
Fig.4 System response of three subsystems of rapid fuzzy adaptive controller based on characteristic model
4 ����
���ܽ�������ģ����ʵ������Ӧ���е��ص�����ϣ�����ģ����̬������ģ������������ܣ�ͨ����Ч����ģ��״̬����ռ䣬������ʶ����ȡֵ�����Ʒ�Χ��������߱�ʶ�㷨��Ч�ʣ������һ���������ģ�͵Ŀ���ģ������Ӧ��������Ʒ�����ͨ���Ե��͵����ڶ���ķ������ʵ��Ƚϣ������֤�˷�������Ч�ԡ�
�ο����ף�
[1] �����, ����, ������. ��������ģ�͵���������Ӧ����[M]. ����: �й���ѧ����������, 2009: 1-15.
WU Hong-xin, HU Jun, Xie Yong-Chun. Adaptive control based on the characteristic model[M]. Beijing: China Science and Technology Press, 2009: 1-15.
[2] �����, ��һ��, ���Һ�, ��. ������ģ�����Խṹ�Ŀ���[J]. �й���ѧ(E��), 2001, 31(2): 137-149.
WU Hong-xin, LIU Yi-wu, LIU Zhong-han, et al. Characteristic modeling and control of flexible structures[J]. Science in China: Series E, 2001, 31(2): 137-149.
[3] �����, ����, ����. ������ģ�ں�������е�Ӧ���о�[C]//2006�й���Э������ļ�(�²�). ����, 2006: 25-36.
WU Hong-xin, YANG Yang, Liu Jie. Characteristic modeling application in space controller[C]//Proceedings of the China Association for Science and Technology Annual Meeting, Beijing, China, 2006: 25-36.
[4] Ma X J, Sun Z Q, He Y. Analysis and design of fuzzy controller and fuzzy observer[J]. IEEE Trans Fuzzy Syst, 1998, 6: 41-51.
[5] Feng G. Stability analysis of discrete time fuzzy dynamic systems based on piecewise Lyapunov functions[J]. IEEE Trans Fuzzy Syst, 2004(12): 22-28.
[6] Wu H X, Liu Y W, Liu Z H, et al. Characteristic modeling and the control of flexible structure[J]. Sci China Ser F: Inf Sci, 2001, 44(4): 278-291.
[7] Wu H X, Wang Y C, Xin Y. Intelligent control based on intelligent characteristic model and its application[J]. Sci China Ser F: Inf Sci, 2003, 46(3): 225-241.
[8] ����. ��������������ģ����̬������ģ����Ʒ����о�[D]. ����: �廪��ѧ�����ϵ, 2009: 30-50.
LUO Xiong. Fuzzy characteristic modeling and control method research for aerospace vehicles[D]. Beijing: Tsinghua University. Department of Computer Science and Technology, 2009: 30-50.
[9] Luo X, Sun Z Q, Sun F C. A new approach to fuzzy modeling and control for nonlinear dynamic systems: neuro-fuzzy dynamic characteristic modeling and adaptive control mechanism[J]. International Journal of Control, Automation, and Systems, 2009, 7(1): 123-132.
[10] Luo X, Li J. Fuzzy dynamic characteristic model based attitude control of hypersonic vehicle in gliding phase[J]. Science in China Series F: Information Sciences, 2011, 54(3): 448-459.
(�༭ �²ӻ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(61004021��61074066)
ͨ�����ߣ��˽���(1974-)���У����ϳ����ˣ���ʿ�о��������¼�����������ϵͳ�о����绰��010-51537385��E-mail: djq06@mails.tsinghua.edu.cn
ժҪ��ģ����̬������ģ�ǽ�������ģ��ģ����������Ƶ�һ�����ܽ�ģ���������Ⱦ�����������ģ���ƵĹ��̻�ʵ��Ӧ�÷�����ص㣬���ܸ�������֤�ϸߵĿ��ƾ��ȡ�������Դ�����������ʵ��Ӧ���е�ʱ�����ܳ���������ģ����̬������ģ������������ܣ�ͨ����Ч����ģ��״̬����ռ䣬������ʶ����ȡֵ�����Ʒ�Χ����߱�ʶ�㷨��Ч�ʣ������һ���������ģ�͵Ŀ���ģ������Ӧ��������Ʒ������������������֤�˷�������Ч�ԡ�
