
DOI: 10.11817/j.issn.1672-7207.2015.02.014
��Ĵ�����·�����ٿ����㷨
�����壬���پ�
(���ϴ�ѧ ���繤��ѧԺ��������Դ�������ü��������ص�ʵ���ң����� ��ɳ��410083)
ժ Ҫ��
�˶�ѧ��·��ƫ��ģ�ͣ�������Ĵ����ڹ��������г��ֵ�·��ƫ���������һ���µ�·�������㷨�������Ĵ��������߶���Լ����·�������㷨���������ٶȺͽ��ٶ��м�����������������Ĵ��������ֽ��ٶ�ͻȻ�仯�����µ�ϵͳʧ�ȡ�ͬʱ��Ϊ���ϵͳ����Ӧʱ�䣬�㷨��������PID�������Ƶı������ڣ�����������ŵ��֤������ϵͳ���ȶ��ԣ�������ɿ�2�ֵ�����������·����·�����ٽ��з��档�о������������������µ�·�������㷨�������õĿ����Ժ��ȶ��ԣ��ܹ�������ɿ��Ĵ��������߿���Ҫ��֤�Ĵ������õ��������ܡ�
�ؼ��ʣ�
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2015)02-0472-07
Path tracking control algorithm of the deep sea tracked vehicle
HAN Qingjue, LIU Shaojun
(National Key Laboratory of Development and Utilization of Deep-Sea Mineral Resource,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The kinematic and position error model of the deep sea tracked vehicle was established, and a new path tracking control algorithm was proposed to solve the path error problem of tracked vehicle during working. Based on the dynamic constraints, two intermediate variables were introduced in the control algorithm to avoid the systematic instability due to abrupt change in angular velocity of the vehicle sprocket. To improve the response time of the system, a proportional element was introduced in the algorithm. Meanwhile, the stability of the control system was proved using Lyapunov method, and a series of simulations of tracking two typical deep sea mining desired paths were carried out. The results show that the suggested algorithm is valid and can meet the control requirement; therefore, the walking performance of the tracked vehicle is ensured.
Key words: deep sea; tracked vehicle; path tracking; algorithm
�����6 km�������˼��ܽ�Dzɿ�������ԣ��������������Ƴ����������Ĵ�ʽ�ɿ���ɿ�ϵͳ[1]������������Ĵ���ϵͳ��Ϊ������ɿ�ϵͳ�ĺ���֮һ��Ϊ�����о����ȵ㡣�����ܵ�������ϡ�������ص��Լ����������Ȼ������ص�Ӱ�죬��Ĵ�ʽ�ɿ����߿��ƽ����ѡ�Ϊʹ�ɿ���ȷ����Ԥ������·�����к�����ҵ�����ú�����Ч��·�����ٿ����㷨�Ե���Ϊ�ؼ���Herber ��[2]�Է������ƶ������˵��ȶ��Խ������о���Endo��[3]���ò�෨��С���Ĵ���������·�����ٿ����о���Keiji��[4]�ڿ��Ǵ��������������������˲�෨·�����ٿ��Ƶ�ȷ�ԣ�Zhou��[5]���÷��߲������Ʒ�����˻����˲����ĸ����㷨���쿡��[6]�����˫��������������·�������㷨������������ŵ��֤����ϵͳ��ȫ���ȶ��ԡ����ǣ���Щ�о���Ҫ����˶�������Լ�½�ó�������Ĵ�ʽ�ɿ����ߵĻ������临�ӣ������ܵ�����ϡ�������Լ�����������Ӱ�죬�䶯��ѧ���˶�ѧ���о����ȵ㡣Schulte��[7]ͨ�����۷����ʹ���ʵ�����Ĵ�ʽ�ɿ���ѧ���Խ������о���Yeu��[8]�����PID����ǿ��PD·�����ٿ���������ͨ����2�ֿ���Ч���ķ���Աȣ��������ʻ������Ĵ�����·�����ٿ��ƽ������о���֮��Yeu��[9-10]��������������Լ�LOS����·�����ٿ����㷨����ͨ��ʵ����֤���㷨�Ŀ����ԡ�Wang��[11]����ģ���������ۣ����������״̬����������ʱ����ɿ�·�����ٿ����㷨��������[12]��������Ĵ�ʽ�ɿ�Һѹ����ϵͳģ�ͣ�����ģ���㷨�����˶������˿��ơ�Dai��[13]�ۺϿ����������ʼ�������Ӱ�죬�����PID�㷨��ʵ���˶Ժ����Ĵ�����·�����ٿ��ơ�Ȼ���������о����ϡ��������ΪӰ��·�����ٿ��Ƶ���Ҫ���أ��������˲ɿ�����ϵͳ�������еĶ���Լ����·�����������Ӱ�졣������������Ĵ����˶�ѧģ�͵Ļ����ϣ����һ���µ�·�������㷨���㷨�������м����ٶȺͽ��ٶȱ����������Ĵ�����ʵ������ϵͳ�Ķ���Լ����ͨ����2�ֵ��͵IJɿ�·���ķ���������õ��˱ȽϺõĿ���Ч����
1 ��Ĵ����˶�ѧģ��
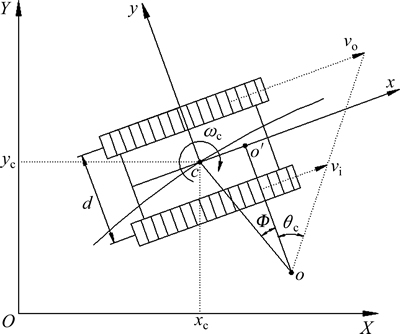
��Ĵ���������װ����������2���Ĵ����ɣ������߶������Ĵ��������ṩ��ͨ�����������Ĵ������ֵ�ת�ٿ���ʵ���Ĵ���ֱ�к�ת����̡����ǵ���Ĵ������������������ɶȱ仯���٣����Ĵ������Լ�Ϊ1����ά�ij����˶�ѧ���⡣��ȫ������ϵXOY�У�ѡȡ�̶����Ĵ����ϵ�����ϵͳxoy�����Ĵ������˶����̽�����������ͼ1��ʾ��
ͼ�У�o��Ϊ�Ĵ����˶�˲�ģ�cΪ�Ĵ����������ģ�dΪ�Ĵ��������Ĵ������ľࣻfΪ����ǣ���C�Ĵ����ķ���ǣ���CΪ�Ĵ����Ľ��ٶȣ�vi��vo�ֱ�Ϊ�ڡ�����Ĵ������ٶȡ��ڲ��������������£�
 (1)
(1)
ʽ�У�rΪ�Ĵ�ת���뾶����i�ͦ�o�ֱ�Ϊ�ڡ�����Ĵ������ֽ��ٶȡ��ɴˣ����Եõ��Ĵ��������ٶȺͽ��ٶ�Ϊ��
 (2)
(2)
 (3)
(3)
��ͼ1�еļ��ι�ϵ��֪
 (4)
(4)
����ִ����ɿ���ҵ���Ĵ����������������ٶȽ�С(Լ0.5 m/s)��ͬʱ�����ܵIJ���Ħ�����ܴ���ˣ��ٶ����Ĵ���ת�������������������IJ������Ϊ0����ͼ�� =0�㡣���Ĵ������˶�ѧ����Ϊ��
=0�㡣���Ĵ������˶�ѧ����Ϊ��
 (5)
(5)
 (6)
(6)
 (7)
(7)
ͼ1 �Ĵ����˶�ѧģ��
Fig. 1 Kinematic model of tracked vehicle
2 ��Ĵ���·��ƫ��ģ��
������ɿ�Ϊ����߿���Ч�ʣ����Ĵ������п�����ҵǰ�俪��·���Ѿ�����ȷ��������ʵ�ʲɿ�����У����ڲ���ƫ����������ʲ��������������Լ����Ĵ��������������ܵ����õ�Ӱ�죬��Ĵ�������ҵ����������������·���������һ��ƫ���·��ƫ��ģ�Ϳ���ͼ2��ʾ��ͼ2�У�LΪԤ��·����Pd(xd��yd����d)Ϊ�Ĵ�������λ�����ꣻPC(xC��yC����C)Ϊ�Ĵ�����ǰλ�����ꡣ�����Ĵ���PeΪ��ǰλ��������λ�õ�ƫ���Pe����ͨ����ʽ����õ���
 (8)
(8)

ͼ2 �Ĵ���·��ƫ��ģ��
Fig. 2 Position error of tracked vehicle
ͬʱ���Եõ�·��ƫ��ĵ���Ϊ
 (9)
(9)
·�����ٿ����������ʹ�Ĵ���ϵͳ�������ʼλ������£�ȷ���Ĵ������������ ��
�� ʹ��(xe��ye����e)T�н���limt����||(xe��ye����e)T||=0��
ʹ��(xe��ye����e)T�н���limt����||(xe��ye����e)T||=0��
3 �Ĵ������߶���Լ��
��Ĵ������˶������У�������������ϵͳ����������Լ�����Ĵ������ֵĽ��ٶȲ�������������ڿ����Ĵ�������·�����ٹ����У�Ӧ�þ������������ֽ��ٶ�ͻȻ�仯����ķ���������ᵼ��ϵͳ�Ļ�е������Ĵ����ش���Щ���������Ĵ�����ϵͳ�ȶ���
���Ĵ��������ֽǼ��ٶȵ����ֵΪ��max�����Ĵ������߶���Լ������Ϊ
 (10)
(10)
ͬʱ����ʽ(1)~(3)�ɵ�
 (11)
(11)
��ʽ(11)��2��ʽ����Ӳ�ȡ���ɵ�
 (12)
(12)
ʽ�У�aC�ͦ�C�ֱ�Ϊ�����ֵ����ٶȺͽǼ��ٶȡ���ʽ(12)���Կ����������ֵĽǼ��ٶȺ����ٶ�Լ�����������һ�𣬽����Ǽ��ٶ�ƽ�ֿ��Եõ������ĽǼ��ٶȺ����ٶ�Լ������Ϊ��
 (13)
(13)
 (14)
(14)
4 ·�������㷨
���Ĵ�������Լ��������֪������Ƶ�·�������㷨����ʹ�Ĵ������ֽǼ��ٶȳ��������ֵ��ͬʱ��Ϊ�˱�֤�Ĵ���ϵͳ���ȶ��ԣ������ֵĽ��ٶ�Ҳ��Ӧ��ͻȻ�仯��Ϊ����������2�����������㷨���������������ٶȺͽ��ٶ��ж��м����vj�ͦ�j��
 (15)
(15)
ʽ�У�k1��k2��k3��k4Ϊ����ϵ������Ϊ��ֵ��sgn(x)Ϊ���ź�������һ���IJ������ڦ�t�ڣ����Խ����ٶȺͽ��ٶ��м����ת��Ϊ���ٶ��м��������
 (16)
(16)
����ʽ(16)�еļ��ٶȲο�ֵ�ǻ��ڶ���Լ���ģ����ԣ����˲ο�ֵ�뼯���������ٶȺͽǼ��ٶȽ��бȽϣ�ȡ��Сֵ��Ϊ�����Ĵ���·�����ٿ������룬�õ�·�����ٿ����㷨Ϊ��
 (17)
(17)
 (18)
(18)
�ڲ������ڦ�t�ڣ����Ĵ��������ֵ����ٶȺͽ��ٶȽ�����ɢ�����Եõ�·�����ٵĿ��Ʒ���Ϊ
 (19)
(19)
��·�������㷨��˼����Դ�ڴ�ͳ��PID���ơ���ͳPID�����У��������ڶ���ϵͳ��Ӧ�Ŀ������������ƣ�����Ӧ���Ա��������⣬�Ĵ����Ķ���Լ����·��ƫ���йأ����ԣ����м����������amax|xe|�ͦ�max|��e|��
5 �㷨�ȶ���֤��
��Ĵ���·�����ٿ���ϵͳ���ȶ���Ҫ���Ĵ����������κ�λ��Ϊ��ʼ������ϵͳ���ն��ܸ��ٵ�����·���ϣ���ϵͳ���������ԡ�ѡȡ������ŵ����

����ʽȡ����
 (20)
(20)
��ʽ(15)��֪��
 (21)
(21)
 (22)
(22)
���У�adΪ�Ĵ�������λ�ô������ٶȡ���ʽ(21)��(22)����ʽ(20)��
��Ϊk1��k2��Ϊ��ֵ�� ���ҵ�
���ҵ� ʱ��
ʱ�� �����ԣ���
�����ԣ��� ʱ��
ʱ�� ����ϵͳ�����ȶ���������Ĵ�������ǵ�ϵͳ�ȶ��Կ�������ͬ���ķ������� ֤����
����ϵͳ�����ȶ���������Ĵ�������ǵ�ϵͳ�ȶ��Կ�������ͬ���ķ������� ֤����
6 ·�����ٷ���
6.1 ��ɿ�Ԥ��·��
������ɿ�����Ŀǰ�������ձ��������ɼ�·��Ϊ��S����·����Ϊ�˱�֤�Ĵ���������ҵ���̰�ȫ����Ч�뻷�����������[14]�����2���µIJɼ�·������ͼ3��ʾ��
��2�ֲɼ�·��(a��b)�������¡��ɼ�·��aʾ��ͼ��ͼ4��ͼ4��R=21.8 m���Ĵ������ɼ�·��a����ʱ����Ҫ����4�ε��٣���ͼ4�����ߢ�~����ʾ����1�ε���ʹ�Ĵ�����ֱ����ʻת��Ϊ������ʻ���Ĵ���ת����ʻ�ǶȦ�=55.97�����е�2�ε��٣���ת����ʻ�ǶȦ�=291.94��ʱ���е�3�ε��١��ٽ���ת����ʻ�ǶȦ�=55.97�����е�4�ε��٣�������ֱ����ʻ���Ĵ���������4�ε��ٺ�֤2��ֱ����ʻ�켣���D�����Ĵ����Ŀ���5.2 m���ɼ�·��b��ͼ5��
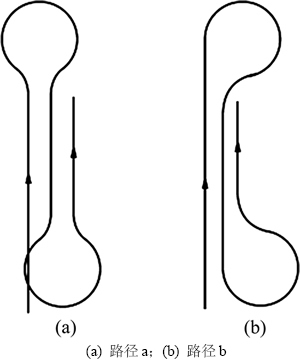
ͼ3 2�����Ͳɼ�·��ʾ��ͼ
Fig. 3 Two new mining paths

ͼ4 �ɼ�·��aʾ��ͼ
Fig. 4 Diagram of mining path a

ͼ5 �ɼ�·��bʾ��ͼ
Fig. 5 Diagram of mining path b
���ڲɼ�·��b���Ĵ�������3�ε��٣����У�2��ת����ʻ�Ƿֱ�Ϊ��=83.15�㣬��=263.15�㣬Բ���켣�뾶R=21.8 m��2��ֱ�߹켣���D=5.2 m��
6.2 �������
Ϊ����֤�����������·�������㷨����Ч�ԣ��ֱ��2�ֲɼ�·�����з��棬����������1��ʾ��
��1 ���滷������
Table 1 Parameters of the simulation

2�ֲɼ�·������ʼλ��Ϊ(0-0-0)��Ϊ��ʹ�������һ���ԣ����ٲɼ�·��a�ķ����У��趨�Ĵ����ij�ʼλ��Ϊ(0��-5��0)������Сƫ��·�����٣������ٲɼ�·��b�ķ����У���ʼλ��ƫ���趨Ϊ(-10��-10��0)�����ڴ�ƫ��·�����١�
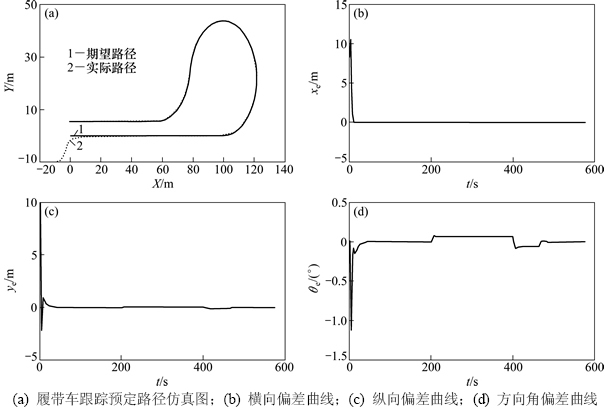
ͼ6(a)��ʾΪ�Ĵ���ʵ������·����Ԥ��·�߷���Ա�ͼ����ͼ6(a)���Կ��������濪ʼʱ�Ĵ�����ʼλ��ƫ��Ϊ5 m���Ĵ�������������Ԥ��·�������λ�ÿ�����ˮƽ����Լ����10 m����ʻ������·���ϣ��˺��Ĵ���ʵ������·��ʼ����Ԥ��·���Ǻϣ�˵��·������Ч�����á�
ͼ6(b)~(d)��ʾ�ֱ�Ϊ·�����ٹ������Ĵ������������Լ������ƫ�����ߡ���ͼ6(b)���Կ������Ĵ�������ʱ����λ��ƫ��Ϊ0�����ƫ����ֲ����������Ĵ������ٹ����в��ϵ��������ٶ����£�10 s�����λ��ƫ���ȶ���0����˵�������㷨�ں���λ�þ������õĿ����Ժ��ȶ��ԡ�
ͼ6(c)��ʾΪ����ƫ�����ߡ���ͼ6(c)���Կ������Ĵ�������ʱ����ƫ��Ϊ5 m�����ƫ��Ѹ�ټ�С������10 s���ң�����ƫ���ȶ���0����˵����ʱ�Ĵ�������Ԥ��·�����ߣ�����200~265 s�Լ�480~510 s�ڼ䣬����ƫ�����һ��������������ΧΪ��0.2 m���������ڴ�ʱ�Ĵ�������ת����ٽΣ��ٶȵĸı䵼�¸�������ٴγ��֡�����ƫ�����Χ��С�������������Χ�ڣ��ʿ��Խ��ܡ�

ͼ6 Сƫ������²ɼ�·��a������
Fig. 6 Simulation results of mining path a with small initial position error
ͼ7 ��ƫ������²ɼ�·��b������
Fig. 7 Simulation results of mining path b with large initial position error
ͼ6(d)��ʾΪ�����ƫ�����ߣ���仯����������ƫ��һ�¡�ͬ����200~265 s�Լ�480~510 s�ڼ䣬�����Ĵ���ת����٣������ƫ����ֲ�����������ΧΪ��0.1 rad�������������Χ�ڣ����Խ��ܡ�
�ۺ����϶�·�����ٹ��̺��������Լ������ƫ��ķ�����֪���ڲɼ�·��a����£�������Ŀ��Ʋ��Կ��������Ĵ���·������Ҫ�����㷨���������ȶ��ԡ�
ͼ7(a)��ʾΪ�Ĵ���ʵ������·����Ԥ��·�߷���Ա�ͼ����ͼ7(a)���Կ��������濪ʼʱ�Ĵ�����ʼλ�ú�������ƫ���Ϊ10 m�����ڴ�ƫ�Χ���Ĵ�����������Ѹ�ٳ�Ԥ��·�������λ�ÿ�����ˮƽ����Լ����25 m����ʻ������·���ϣ��˺��Ĵ���ʵ������·��ʼ����Ԥ��·���Ǻϣ�˵��·������Ч�����á�
ͼ7(b)~(d)��ʾΪ·�����ٹ������Ĵ������������Լ������ƫ�����ߡ���ͼ7(b)���Կ������Ĵ�������ʱ����λ��ƫ��Ϊ10 m�����ƫ��Ѹ�ټ�С��Լ����10 s��ƫ���С���ȶ���0����
ͼ7(c)��ʾΪ����ƫ�����ߡ�ͼ7(c)���Կ������Ĵ�������ʱ����ƫ��Ϊ10 m�����ƫ��Ѹ�ټ�С������һ����������ԭ�����ڴ�ƫ�������Ϊ��֤·�����ٵĿ����ԣ��Ĵ������١�ƫ���15 s���С���ȶ���0����
ͼ7(d)��ʾΪ�����ƫ�����ߡ���ͼ7(d)�ɼ������ʼƫ��Ϊ0�㣬���ͻȻ�����Ѹ�ټ�С����Լ��15 s������С���ȶ���0�㴦����˵���Ĵ�������ʱ��Ԥ��·������һ�¡�����·�����ٹ����Ĵ���ת�䣬���·����ƫ������ͬʱ�����ƫ����200~400 s��ƫ��Ϊ0.1 rad����400~460 s��ƫ��Ϊ-0.1 rad����˵���ڲɼ�·��(b)��ת����̣��Ĵ��������ƫ�����һ��������������ɽ��ܷ�Χ�������巽���ƫ�����Ч�����á�
�ۺ����϶Բɼ�·��bʱ·�����ٹ��̺��������Լ������ƫ��ķ�����֪��������Ŀ��Ʋ��Կ��������Ĵ���·������Ҫ�����㷨���������ȶ��ԡ�
�ۺ����Ϸ�������֪��������ɿ�ͬ�����ɼ�·���������������·�������㷨��ʹ�Ĵ���������Ч�ظ��������ɼ�·�������ٹ������в����������ڿɽ��ܷ�Χ�ڡ����㷨�ܹ�������ɿ��Ĵ��������߿���Ҫ��֤���Ĵ������õ��������ܡ�
7 ����
1) ��������������Ĵ����˶�ѧģ�ͺ�·��ƫ��ģ�ͣ���������Ĵ�������Լ��������Ϊ��Ĵ���·�������ṩ�����ݡ�
2) ������Ĵ�������Լ�����������һ���µ�·�����ٿ����㷨���㷨�������ٶ��м��������֤��ϵͳ�Ķ���Ҫ������������ŵ��֤�����㷨���ȶ��ԡ�
3) �����ɿ�2�ֲ�ͬ�����ɼ�·������·�����ٿ��ƽ��з��棬����������·�����ٿ���Ҫ��֤����Ĵ������ߵ�ȷ�ԡ�
��һ����������·�����ٿ���ʵ���о���
�ο����ף�
[1] ���. �Ĵ�ʽ������������ߵĵ����彨ģ�о���������[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2010: 1-10.
DAI Yu. The modeling research and simulation analysis on the single-rigid-body of tracked miner moving on the seafloor[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2010: 1-10.
[2] Herber G, Kostas J. Discontinuous backstepping for stabilization of nonholonomic mobile robots[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Washington DC, 2002: 3948-3953.
[3] Endo D, Okada Y, Keiji N, et al. Path following control for tracked vehicles based on slip-compensation odometry[C]// Proceedings of the International Conference on Intelligent Robots and Systems. San Diego, USA, 2007: 2871-2876.
[4] Keiji N, Endo D, Yoshida K. Improvement of the odometry accuracy of a crawler vehicle with consideration of slippage[C]//Proceedings of International Conference on Robotics and Automation. Roma, Italy, 2007: 2752-2757.
[5] ZHOU Bo, HAN Jianda. Nonlinear estimation methods for autonomous tracked vehicle with slip[J]. Chinese Journal of Mechanical Engineering, 2007, 20(4): 1-7.
[6] �쿡��, ������. ��������ʽ�ƶ������˹켣���ٿ����о�[J]. �й���ѧ������ѧѧ��, 2004, 34(3): 376-380.
XU Junyan, ZHANG Peiren. Research on trajectory tracking control of nonholonomic wheeled mobile robots[J]. Journal of University of Science and Technology of China, 2004, 34(3): 376-380.
[7] Schulte E, Handschuh R, Schwarz W. Transferability of soil mechanical parameters to traction potential calculation of a tracked vehicle[C]//International Society of Offshore and Polar Engineers. Proceedings of the 5th ISOPE Ocean Mining Symposium. Tsukuba, Japan: ISOPE, 2003: 123-131.
[8] Yeu T K, Hong S, Kim H W. Path tracking control of tracked vehicle on soft cohesive soil[C]//Proceedings of the Sixth ISOPE Ocean Mining Symposium. Changsha, China, 2005: 168-173.
[9] Yeu T K, Park S J, Hong S. Path tracking using vector pursuit algorithm for tracked vehicles driving on the soft cohesive soil[C]//Proceedings of SICE-ICASE International Joint Conference. Busan, Korea, 2006: 2781-2786.
[10] Hong S, Choi J S, Kim H Y, et al. A path tracking control algorithm for underwater mining vehicles[J]. Journal of Mechanical Science and Technology, 2009, 23(8): 2030-2037.
[11] WANG Suiping, GUI Weihua, ZHANG Tao, et al. Fuzzy and predictive control on the deep-sea vehicle[C]//Proceedings of the Sixth ISOPE Ocean Mining Symposium. Changsha, China, 2005: 181-186.
[12] ����, ������. ���������Զ�����Ԥ������·��[J]. ��е����ѧ��, 2007, 43(1): 152-157.
LI Li, ZOU Xinglong. Seafloor robots control on tracking automatically planning mining paths[J]. Chinese Journal of Mechanical Engineering, 2007, 43(1): 152-157.
[13] DAI Yu, LIU Shaojun. Theoretical design and dynamic simulation of new mining paths of tracked miner on deep seafloor[J]. Journal of Central South University, 2013, 20(4): 918-923.
[14] ������, ���پ�, ���, ��. ˮ���Ĵ�ʽ�ɿ���ҵ�����µĶ���ѧ������·�����ٿ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(2): 307-312.
HAN Qingjue, LIU Shaojun, DAI Yu. Dynamic analysis and path tracking control of tracked underwater miner in working condition[J]. Journal of Central South University (Science and Technology), 2011, 42(2): 307-312.
(�༭ �²ӻ�)
�ո����ڣ�2014-03-10�������ڣ�2014-05-21
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51074179)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2012AA091201)(Project (51074179) supported by the National Natural Science Foundation of China; Project (2012AA091201) supported by National High Technology Research and Development Program of China (863 Program))
ͨ�����ߣ������壬��ʿ�о��������º����Ĵ��ɿ����߿����о���E-mail��qingjuehan@yahoo.com.cn
ժҪ��������Ĵ����˶�ѧ��·��ƫ��ģ�ͣ�������Ĵ����ڹ��������г��ֵ�·��ƫ���������һ���µ�·�������㷨�������Ĵ��������߶���Լ����·�������㷨���������ٶȺͽ��ٶ��м�����������������Ĵ��������ֽ��ٶ�ͻȻ�仯�����µ�ϵͳʧ�ȡ�ͬʱ��Ϊ���ϵͳ����Ӧʱ�䣬�㷨��������PID�������Ƶı������ڣ�����������ŵ��֤������ϵͳ���ȶ��ԣ�������ɿ�2�ֵ�����������·����·�����ٽ��з��档�о������������������µ�·�������㷨�������õĿ����Ժ��ȶ��ԣ��ܹ�������ɿ��Ĵ��������߿���Ҫ��֤�Ĵ������õ��������ܡ�
