
DOI: 10.11817/j.issn.1672-7207.2017.08.008
�ڵ�������������ϵ��϶���ѧ������������֤
�����ƣ�̷��������������½��ϼ
(�Ͼ����պ����ѧ ����ѧԺ������ �Ͼ���210016)
ժ Ҫ��
�Ǽ�֧����е�ʱ��֧�иնȣ����ü��в����������ڵ����������dz���ϵͳ����-�����϶���ѧģ�ͣ�����Rung-Kutta�㷨���õ�̫���ֺ����Ǽܵ����ٶ���Ӧ������ij�ͻ�е���ʷ������̨��չ�������飬����С���任��ý����źš��о����������֧�иն�ʱ������µ����ٶȷ�ֵҪ����֧�иն�Ϊ��ֵʱ�ļ��ٶȡ�����������ֵ������ֵ�����Ϊ16.27%����������Χ�ڣ���������������Ӱ����ڽϴ�ƫ�ͬʱ������ʱ��֧�иն����õ������ٶȸ��ӽ�����������֧�иնȵ�ʱ���Բ��ɺ��ԡ�
�ؼ��ʣ�
�ڵ���������������ϵ�������������϶���ѧ��������֤��
��ͼ����ţ�TH132.413 ���ױ�־�룺A ���±�ţ�1672-7207(2017)08-2016-08
Theoretical and experimental analyses of coupling dynamics characteristic of planetary gear with meshing beyond pitc point
BAO Heyun, TAN Zaiyin, ZHU Rupeng, LU Fengxia
(College of Mechanical and Electrical Engineering,
Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract: Considering the time-varying support stiffness of bearings of the sun gear and the carrier, the lumped-parameter method was used to establish a coupling dynamics model of planetary gear transmission with meshing beyond pitch point. The vibration acceleration responses of the sun gear and the carrier were obtained by using Runge-Kutta method. The theoretical results show that the vibration acceleration values with time-varying support stiffness are larger than that with constant support stiffness. The experimental study using a mechanical power closed test rig was carried out. The experimental signals were denoised by the wavelet theory. There is an error of 16.27% between theoretical and experimental values in horizontal direction, which is in the allowed range; the values have large error in vertical direction due to the influence of gravity. The experiment results also show that the vibration acceleration values with the time-varying support stiffness are closer to the experimental results, which indicates that the time-variant of support stiffness is not ignorable.
Key words: meshing beyond pitch point; planetary gear; rolling element bearing; coupling dynamics; experiment
����ͨ����������ʽ�У�Ħ�����ڽڵ㴦�����������ϵͳ�ڵij����ͨ�����ýڵ������ϣ�ʹ��ʵ�������߲������ڵ㣬����Ħ�����ڽڵ㴦����������ϵͳ�ڵij������Ч������ϵͳ�Ķ���ѧ���ԡ�Ŀǰ�ڵ������ϳ���ϵͳ����ѧ�������в��ٵ��о��ɹ�[1-4]����Щ�о��ɹ����������˽ڵ������ϵ�ʵ�������������Ե��Գ��֡����dz��ֵ�ƽ��-Ťתģ��Ϊ�о��������˽ڵ������϶�ϵͳ����ѧ���Ե�Ӱ�졣����Щ�о��ɹ�����е�֧�иն�ֻ�ǼĴ����ɳ�������û�п���ʱ���ԶԴ���ϵͳ����ѧ��Ϊ��Ӱ�죬û�ܽ�һ����ʾϵͳ�Ķ���ѧ���ԣ���ֻ�������о���û�еõ�������֤��LIEW��[5-6]�����˹������ʱ��նȶԵ���ƽ������ִ���ϵͳ����ѧ��Ϊ��Ӱ�죻��־�յ�[7]�����˹������ʱ��նȣ����������dz���-�����϶���ѧ���ԡ���Ȼ��Щ�о������˹�����е�Ӱ�죬��ϵͳ�еij��ָ�������ͨ���ϣ����ǽڵ������ϣ��ڽڵ�������������ϵ�п������ʱ��֧�иնȣ���һ����ʾ�ڵ����������dz���ϵͳ����ѧ���Ե��о������б��������������Խڵ�������������ϵƽ��-Ťתģ��Ϊ�о������ǹ������ʱ��֧�иնȣ���������-�����϶���ѧģ�ͣ����õ�ϵͳ��̬��Ӧ������չ��֤���顣
1 �������ʱ��֧�иնȼ���
1.1 ���������������ι�ϵ
�������(������������Ϊ�о�����)����Ȧ����Ȧ�������弰���ּ���ɡ��ٶ���Ȧ����ת��������ӣ���Ȧ��������������ӣ�������������Ȧ֮��Ⱦ����У������������֮��Ϊ������������б�����Ҫ�ǹ����������֮��ĽӴ����Ρ�����ܾ��������غɷֲ���ͼ1��ʾ��
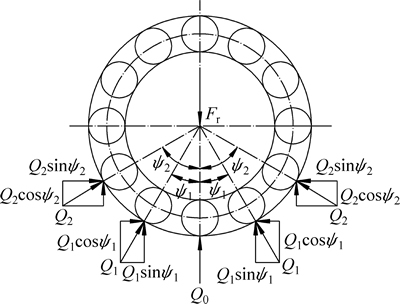
ͼ1 ��������غɷֲ�
Fig. 1 Load distribution of rolling bearing
������[8]��֪��������������Ӱ�죬�侶����Fr�ͱ��Φ�r�Ĺ�ϵΪ

 (1)
(1)
ʽ�У�ki��ke�ֱ�Ϊ����м��γߴ�Ͳ��ϵ��йص�ϵ����DgΪ������ֱ����DiΪ�����Ȧ�������Ӵ���ֱ����DeΪ�����Ȧ�������Ӵ���ֱ������iΪ����������Ȧ�ĽӴ����ʰ뾶����eΪ����������Ȧ�ĽӴ����ʰ뾶��ZΪ���ع�������Ŀ��
1.2 ʱ��֧�иնȱ���
��ʽ(1)��ϵ�������ϲ���ɵ�
 (2)
(2)
ʽ�У�kHΪHertz�Ӵ��ն�ϵ���������֧�иնȶ������£�
 (3)
(3)
��ʽ(3)��֪�����֧�иնȲ���һ��������������λ�Ƶı仯���仯������ʱ���ԣ����������˿���Ϊ��ն�ϵ����Ӳ����[8]��
2 ����-���������϶���ѧģ��
����������ϵ��ȶ�����ϵ����ṹ�����ӣ����ϵͳ����ѧģ��Ҳ��Ϊ���ӣ�����ģ��ʱ�������¼��裺
1) �������־�����ͬ�������ͼ��β�������������֧�иն���ȡ�
2) �����־�Ϊ������ֱ��Բ�����֣�֧�ź��ֳݼ�Ϊ���ɡ�
3) ���������˶�������ͬһƽ���ڡ�
4) ���Գݲ��϶����ķ�����Ӱ�졣
���ü��в�����������̫���ֺ����ǼܵĹ������ʱ��֧�иնȣ����������֧�иնȵ�ʱ���ԣ������˽ڵ����������dz��ִ���ϵͳ����ѧģ����ͼ2��ʾ(Ħ���������Ǽܺ�������֧��δ��ʾ)��
Ϊ���ڷ��̵Ľ�������ͼ�н�����������ϵ��OXYΪ������ϵ��ԭ��λ�����ǼܵĻ�ת���ģ�X��ͨ����һ�������ֵ��������ģ�OnXnYnΪ������ϵ�������Ǽܹ����������Ǽܵ�����ת��ԭ��λ�ڸ���������������On����������ֱ���OXY������ƽ�С�ͼ2�У�x��y�ֱ�Ϊ�����ĺ���������ƽ�����ɶȣ�uΪ������Ťת���ɶȣ���ˣ�ÿ����������3�����ɶȣ�ͼʾϵͳ����̫���֡����Ǽܡ�N�������ֺ��ڳ�Ȧ����˸�ϵͳ����3N+9�����ɶȡ������϶���ѧģ�ͣ���������ϵͳ�˶��ַ����飺
 (4)
(4)
ʽ�У��±�s��n��c��r�ֱ�Ϊ̫���֡���n�������֡����Ǽܺ��ڳ�Ȧ��m��M�ֱ�Ϊ�����������͵�Ч��������cΪ���Ǽܵ���ת���ٶȣ�rbΪ�����ĵ�����Բ�뾶��kx��ky��k0�ֱ�Ϊ�������������ϵ�֧�иնȺ�Ťת�նȣ� ��
�� �ֱ�Ϊ���Ǽ�����ڵ�n�������ֵ�λ�������Ǽ�2����λ�Ʒ����ͶӰ��
�ֱ�Ϊ���Ǽ�����ڵ�n�������ֵ�λ�������Ǽ�2����λ�Ʒ����ͶӰ�� Ϊ���Ǽ�����ڵ�n�������������Ǽ����߷����ͶӰ��cx��cy��c0�ֱ�Ϊ�������������ϵ�֧�������Ťת���kpn��cpn�ֱ�Ϊ�����ֵ�֧�иնȺ�֧�����
Ϊ���Ǽ�����ڵ�n�������������Ǽ����߷����ͶӰ��cx��cy��c0�ֱ�Ϊ�������������ϵ�֧�������Ťת���kpn��cpn�ֱ�Ϊ�����ֵ�֧�иնȺ�֧����� ��
�� ��
�� Ϊ̫���ֺ������ֵ����Ͻǣ�
Ϊ̫���ֺ������ֵ����Ͻǣ� Ϊ�ڳ�Ȧ�������ֵ����Ͻǣ�
Ϊ�ڳ�Ȧ�������ֵ����Ͻǣ� Ϊ��n�������ֵ�λ�ýǣ�TDΪ����ת�أ�TLΪ����ת�ء�
Ϊ��n�������ֵ�λ�ýǣ�TDΪ����ת�أ�TLΪ����ת�ء�

ͼ2 �ڵ����������dz���ϵͳƽ��-Ťתģ��
Fig. 2 Translational-rotational coupling dynamic model
����̫���ֺ����Ǽܵ����֧�У����������Ȧ����̶�����ʽ(3)�ɵ�ʱ��֧�иն����£�
 (5)
(5)
��ʽ(5)��֪�����֧�иն������������λ���йأ�������֮�������Ϲ�ϵ��
��ϵͳ���ָ����غ϶Ƚ���1��2֮�䣬Fij (iΪsn��rn��j=1��2)Ϊ���ָ������ֳ�֮�����������
 (6)
(6)
ʽ�У�kΪ���ϸնȣ�cΪ�������ᣬ���㷽��������[9]����Ϊ�������ϵ����λ�ơ����ݸ����ϳ��ֵ����λ�ù�ϵ���õ������λ�Ʊ������£�
 (7)
(7)
ʽ�У� Ϊ�ֳݼ���ۺ�������һ������ۺ����������Һ����仯[9-10]����
Ϊ�ֳݼ���ۺ�������һ������ۺ����������Һ����仯[9-10]����
 (8)
(8)
ʽ�У� Ϊ�������ϳ�Ƶ��EiΪ���ָ�i���ۺ��������ķ�ֵ��
Ϊ�������ϳ�Ƶ��EiΪ���ָ�i���ۺ��������ķ�ֵ�� ����ָ������ϳ���λ��
����ָ������ϳ���λ��
�ڵ������ϳ��֣�����ʵ�������߲������ڵ㣬���Ħ�����ڽڵ㴦���������˳�������ǽڵ������ϵ������ص㣬����ϵͳ�˶��ַ����У��ɿ����ɣ����滬��Ħ���� (���У���ΪĦ��������FΪ�ֳ�������)����ΪĦ��������ϵ������һ������ʱ��ĺ�����������ͨ�������ϣ�������[10]��֪�亯��ʽ���£�
(���У���ΪĦ��������FΪ�ֳ�������)����ΪĦ��������ϵ������һ������ʱ��ĺ�����������ͨ�������ϣ�������[10]��֪�亯��ʽ���£�
 (9)
(9)
ʽ�У�p��g����1�����ϳ��֣���p�ͦ�g�ֱ�Ϊ�����ϳ����ڶ�����ϵ�еĽ��ٶȣ�lp��lg�ֱ�Ϊ�����ϳ��ֵ�Ħ�����ۡ����ڽڵ������ϳ��֣����ֳ����Ϲ����У��� ����Ϊ1��-1����Ħ����������
�ڳ������Ϲ����У�Ħ��������������λ�á�������IJ�ͬ���仯�����仯��ֵ�����ڱ����н�Ħ������������ֵ��ȡ��Ħ��������=0.05[11]���м��㡣
����ϵͳ�˶��ַ��̵ľ�����ʽ���£�
 (10)
(10)
ʽ�У�MΪ������������CΪ�������KbΪ�������֧�иնȾ���KmΪ�������ϸնȾ���FΪ����������qΪ����������������

 (11)
(11)
3 ʵ������
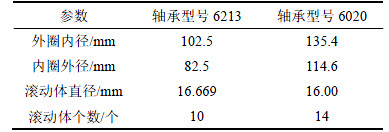
��ij�ڵ����������dz��ִ���ϵͳԭ������Ϊ�����м��㣬��Ҫ�������1�ͱ�2��ʾ��������Ϊ��ͨ������ʽ��������Ϊ�ڵ������ϣ������ָ���N=3��ϵͳ����P=25 kW������ת��n=1 000 r/min��
̫����֧������ͺ�Ϊ6213�����Ǽ�֧������ͺ�Ϊ6020������������1��ʾ��
����Rung-Kutta�㷨��ϵͳ�˶��ַ����������⣬�õ��ȶ���ת��̫���ֺ����Ǽܵ����ٶ���Ӧ���¡�
�ɱ�2��֪�����Ǽܵ���гߴ�Ҫ����̫���ֵ���гߴ磬��ʽ(1)~(3)�ɵ�����˵�֧�иնȸ�����ˣ�ͼ3�����Ǽܵ����ٶ�ҪС��̫���ֵ����ٶȡ�ͼ4��֧�иնȵĶ�ֵȡʱ��֧�иն���ͬ������ֵ������㣬�ɼ�֧�иն�ʱ������µļ��ٶȸ���һЩ��

ͼ3 ̫���ֺ����Ǽܵ����ٶ�
Fig. 3 Vibration accelerations of sun gear and carrier
ͼ4 ʱ��֧�иնȶ����ٶȵ�Ӱ��
Fig. 4 Impacts of time-varying support stiffness on vibration accelerations
��1 ���������Ҫ���β���
Table 1 Geometrical parameters of bearings
��2 �ڵ����������dz���ϵͳ��Ҫ����
Table 2 Main parameters of planetary gear with meshing beyond pitch point

4 ������֤
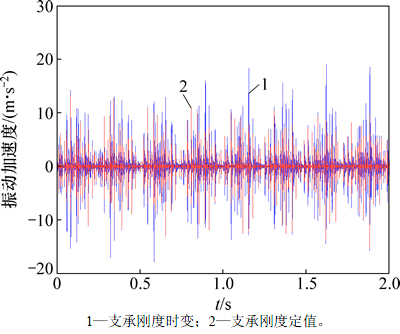
��������ͨ������������ϲ��ü��ٶȴ������������õ����źţ��Է���ϵͳ�������ԡ�����ij��е���ʷ������̨����̫��������������ü��ٶȴ��������Ի�ó���ϵͳ���źţ����������������������1��ͬ�������ָ���N=3��
�������ͺ�ΪPCB356A26ͨ����������ٶȴ���������ͬʱ����3�������ϵ����źţ��źŲɼ�ϵͳΪNI PXIe-1073��ʵ������ת��998 r/min�����鹦��23.90 kW������Ƶ��fs=4 096 Hz����������N=8 192�������õ���ԭʼ�ź���ͼ5��ʾ��
ͼ5��ʾΪ�����õ���ʱ���źţ�������FFT�任�õ�ͼ6��ʾƵ���źš���Ƶ���Ͽɼ�������Ƶ��fm=337 Hz���ź���ͬʱ���ڱ�Ƶ����Ƶ�����ɷ֣���ֱ��������֤���۷����������Ҫ��ԭʼ�źŽ������봦����Ŀǰ����е���źŵ������ж��ַ���[12-13]������С���任�����������нϺõ�Ч��[14]����˵õ��˹㷺Ӧ�á�ѡ����ʵ�С�������źŽ���С���ֽ⣬�õ���Ƶ�͵�Ƶ���������������������ڸ�Ƶ��������ͨ�����ú��ʵ���ֵ�����ɽ���Ƶ����ȥ����ʵ������������
Ŀǰ���õ�С�����ж��֣�����ݲ�ͬ���Ͻ���ѡ������Daubechies(dbN)С��ϵ�����о���ʵ��Ӧ����Ч���Ϻ�[15]����ͼ5�е�ԭʼ�źŲ���db10С������2��ֽ⣬����Ĭ����ֵ������Ƶ�������ع���õ���ͼ7��ʾ��ȥ���źš�
�Ա�ͼ5��ͼ7��֪��С��������Ч��ȥ��������Ӱ�죬ȥ���źŵļ��ٶȷ�ֵ����С��ԭʼ�źš��Ա�ͼ6��ͼ8��֪��ԭʼ�ź��еı�Ƶ����Ƶ�ɷֱִ��˳���ʣ���Ƶ�ʳɷ���ҪΪ����Ƶ�ʣ��õ��˽�Ϊ�ɾ���ȥ���źţ�Ϊ�˷�ֹ�ź�����Ч�ɷֶ�ʧ����û�ж�ԭʼ�źŽ��й����С���ֽ⡣���������Ĵ��ڣ�ʹ��y��������ܵ�Ӱ�죬��ͼ7��ʾ��y��������ٶ�ҪС��x����ȡx����������̫�������ٶ����ֵ������ֵ������ֵ���бȽϣ���������ֵ�ֱ�ȡ֧�иն�ʱ��Ͷ�ֵ2����������3��ʾ���ɱ�3��֪��֧�иն�ʱ������µ�����ֵ������ֵ��������Ϊ16.27%����������ģ���ڽ���ʱ��ȡ���ʵ�����ʵ��ģ�ʹ���һ����ࣻϵͳ����ѧ���̽�Ϊ���ӣ���ֵ����õ����ǽ��ƽ⣻�����������һ����ϵͳ����ԭ������˸����Ĵ��ڣ�������������Χ����֧�иնȶ�ֵ����µ�������ﵽ43.95%��˵��ͬ�������£�֧�иն�ʱ������µ�����С�����ٶ�ֵ���ӽ�����������֧�иնȵ�ʱ���Բ��ɺ��ԡ�
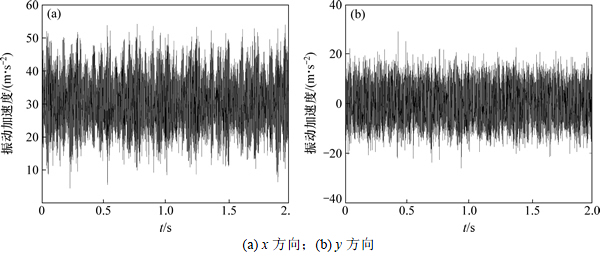
ͼ5 ��������ٶ�ԭʼ�ź�
Fig. 5 Original signals of vibration accelerations for input

ͼ6 ԭʼ�źŵ�FFT�任
Fig. 6 FFT for original signals
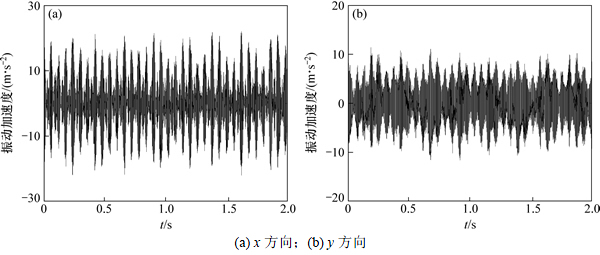
ͼ7 ��������ٶ�ȥ���ź�
Fig. 7 Denoised signals of vibration accelerations for input

ͼ8 ȥ���źŵ�FFT�任
Fig. 8 FFT for denoised signals
��3 ����ֵ������ֵ�Ա�
Table 3 Comparison of theoretical values and experimental values

5 ����
1) �������롢��������й������ʱ��֧�иնȣ����ü��в����������ڵ����������dz���ϵͳ��϶���ѧģ�ͣ�ģ�Ͱ���3N+9�����ɶȣ���һ�����ƽڵ�������������ϵ�����۷���ģ�͡�
2) ����Rung-Kutta�㷨���õ����롢������������ٶ���Ӧ����ʾ��֧�иն�ʱ������µĽڵ�������������ϵ�Ķ���ѧ���ԣ��Աȷ���֧�иն�ʱ���֧�иնȶ�ֵ2������µ����ٶ���Ӧ���������֧�иն�ʱ������µ����ٶȷ�ֵ����
3) ����ij��е���ʷ������̨��չ����֤���飬����С���任��ԭʼ�źŽ��д�������˽Ϻõ������źţ�����������y�������������Ӱ�죬���ٶ�С��x����x����������ֵ������ֵ�����Ϊ16.27%����������Χ�ڣ����۷�������õ��˽Ϻõ���֤��ͬʱ��֧�иն�ʱ���붨ֵ2������£�ǰ�ߵļ��ٶȸ��ӽ�������������֧�иնȵ�ʱ���Բ��ɺ��ԡ�
�ο����ף�
[1] ֣����, ������. �ٳ��������߳��ֽڵ������ϵ��ж�����[J]. ���ݹ�ҵ�ߵ�ר��ѧУѧ��, 2004, 11(3): 13-15.
ZHENG Zengming, LIU Qingsong. The judgment condition for the involute gear pair with fewer teeth number outside pitch point[J].Journal of Lanzhou Polytechnic College, 2004, 11(3): 13-15.
[2] �ᄇ��, ������, �Ź���. ������Բ�����ֳ��ֽڵ������ϵ��о�[J]. ��������ѧԺѧ��(��Ȼ��ѧ��), 2007, 23(2): 5-7.
TIAN Jingyun, WANG Baomin, ZHANG Guohai. Study of involutes cylindrical gear-pair��s emerging node external gearing[J]. Journal of Shaanxi University of Technology (Science and Technology), 2007, 23(2): 5-7.
[3] ������. �ڵ������ϳ��ָ���Ʒ���������ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2012: 56-63.
LIU Jingjing. Design method and dynamics analysis of node external gear-pair[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2012: 56-63.
[4] ������. �ڵ����������dz��ִ���ϵͳ��Ʒ���������ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2013: 54-62.
SUN Yongzheng. Design methods and dynamic analysis of planetary gear transmission drive with meshing beyond pitch point[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Mechanical and Electrical Engineering, 2013: 54-62.
[5] LIEW H V, LIM T C. Analysis of time- varying rolling element bearing characteristics[J]. Journal of Sound and Vibration, 2005, 283(3): 1163-1179.
[6] SAWALHI N, RANDALL R B. Simulating gear and bearing interactions in the presence of faults (Part I): The combined gear bearing dynamic model and the simulation of localised bearing faults[J]. Mechanical Systems and Signal Processing, 2008, 22(8): 1924-1951.
[7] ��־��, �ش�ͬ, ���, ��. ���غ��·�����������dz��ִ���ϵͳ����-�����϶���ѧ����[J]. �����ѧѧ��(��Ȼ��ѧ��), 2012, 35(12): 7-14.
ZHOU Zhigang, QIN Datong, YANG Jun, et al. Gear-bearing coupling dynamics characteristics of wind turbine planetary gear transmission system under variable load[J]. Journal of Chongqing University (Natural Science), 2012, 35(12): 7-14.
[8] ��֥��, �ɺ�. ������м�϶ʱ��-�������ϵͳ����ѧ��Ϊ�о�[J]. ������, 2009, 28(9): 120-124.
HE Zhixian, GAN Hong. Dynamic behavior of a shaft-rolling bearing system with clearance[J]. Journal of Vibration and Shock, 2009, 28(9): 120-124.
[9] ����, ������. ����ϵͳ����ѧ-�������[M]. ����: ��ѧ������, 1997: 160-161.
LI Runfang, WANG Jianjun. Gear system dynamics- vibration impact & noise[M]. Beijing: Science Press, 1997: 160-161.
[10] ���ӿ, ������, ������, ��. ��Ħ���������dz��ִ���ϵͳ�����Զ���ѧģ��[J]. ������, 2010, 29(8): 217-220.
ZHU Enyong, WU Shijing, WANG Xiaosun, et al. Nonlinear dynamics model of planetary gear with friction[J]. Journal of Vibration and Shock, 2010, 29(8): 217-220.
[11] ʯӨ, �����, ���. �����������������Ľ����߳�������Ħ������ѧ�о�[J]. �����ܷ�,2011, 36(7): 32-35.
SHI Ying, JIANG Qinyu, LI Baoliang. Research on friction dynamics of involute gear meshing based on virtual prototyping technology[J]. Journal of Lubrication Engineering, 2011, 36(7): 32-35.
[12] ���岨, ����, ���ҿ�, ��. ä�������뼰���ڻ�е���ź������е�Ӧ���о�[J]. ������, 2006, 25(2): 30-34.
HE Qingbo, KONG Fanrang, ZHU Zhongkui, et al. Blind sources separation for convolutive mixtures and its applications in mechanical vibration noise elimination[J]. Journal of Vibration and Shock, 2006, 25(2): 30-34.
[13] ���ɶ�, ������, ������. ת�����ź����뷽�����о�[J]. �����������, 2003, 23(4): 252-255.
WANG Chengdong, ZHU Yongsheng, ZHANG Youyun. Study on denoising rotor vibration signals contaminated by electromagnetic interference[J]. Journal of Vibration, Measurement & Diagnosis, 2003, 23(4): 252-255.
[14] ������, �ܹ���. С�����������ź�ȥ���е�Ӧ��[J]. ��е�������Զ���, 2010, 2(1): 128-130.
HU Junwen, ZHOU Guorong. Application of wavelet analysis in vibration signal denoising[J]. Mechanical Engineering & Automation, 2010, 2(1): 128-130.
[15] ����. ���źŴ����е�С����ѡ���о�[D]. �Ϸ�: �Ϸʹ�ҵ��ѧ��е����������ѧԺ, 2003: 16-18.
GUO Ya. Research on wavelet base selection for vibration signal processing[D]. Hefei: Hefei University of Technology. School of Machinery and Auto mobile Engineering, 2003: 16-18.
(�༭ �°���)
�ո����ڣ�2016-09-22�������ڣ�2016-12-30
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51305196)(Project(51305196) supported by the National Natural Science Foundation of China)
ͨ�����ߣ������ƣ���ʿ�������ڣ����»�еCAD���Զ����о���E-mail��siyanger@163.com
ժҪ������̫���ֺ����Ǽ�֧����е�ʱ��֧�иնȣ����ü��в����������ڵ����������dz���ϵͳ����-�����϶���ѧģ�ͣ�����Rung-Kutta�㷨���õ�̫���ֺ����Ǽܵ����ٶ���Ӧ������ij�ͻ�е���ʷ������̨��չ�������飬����С���任��ý����źš��о����������֧�иն�ʱ������µ����ٶȷ�ֵҪ����֧�иն�Ϊ��ֵʱ�ļ��ٶȡ�����������ֵ������ֵ�����Ϊ16.27%����������Χ�ڣ���������������Ӱ����ڽϴ�ƫ�ͬʱ������ʱ��֧�иն����õ������ٶȸ��ӽ�����������֧�иնȵ�ʱ���Բ��ɺ��ԡ�
[1] ֣����, ������. �ٳ��������߳��ֽڵ������ϵ��ж�����[J]. ���ݹ�ҵ�ߵ�ר��ѧУѧ��, 2004, 11(3): 13-15.
[2] �ᄇ��, ������, �Ź���. ������Բ�����ֳ��ֽڵ������ϵ��о�[J]. ��������ѧԺѧ��(��Ȼ��ѧ��), 2007, 23(2): 5-7.
[3] ������. �ڵ������ϳ��ָ���Ʒ���������ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2012: 56-63.
[4] ������. �ڵ����������dz��ִ���ϵͳ��Ʒ���������ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2013: 54-62.
[8] ��֥��, �ɺ�. ������м�϶ʱ��-�������ϵͳ����ѧ��Ϊ�о�[J]. ������, 2009, 28(9): 120-124.
[9] ����, ������. ����ϵͳ����ѧ-�������[M]. ����: ��ѧ������, 1997: 160-161.
[10] ���ӿ, ������, ������, ��. ��Ħ���������dz��ִ���ϵͳ�����Զ���ѧģ��[J]. ������, 2010, 29(8): 217-220.
[11] ʯӨ, �����, ���. �����������������Ľ����߳�������Ħ������ѧ�о�[J]. �����ܷ�,2011, 36(7): 32-35.
[12] ���岨, ����, ���ҿ�, ��. ä�������뼰���ڻ�е���ź������е�Ӧ���о�[J]. ������, 2006, 25(2): 30-34.
[13] ���ɶ�, ������, ������. ת�����ź����뷽�����о�[J]. �����������, 2003, 23(4): 252-255.
[14] ������, �ܹ���. С�����������ź�ȥ���е�Ӧ��[J]. ��е�������Զ���, 2010, 2(1): 128-130.
[15] ����. ���źŴ����е�С����ѡ���о�[D]. �Ϸ�: �Ϸʹ�ҵ��ѧ��е����������ѧԺ, 2003: 16-18.
