
���綯������Һ���������ƶ�����
��־ǿ1, 2����ѧѸ1
(1. �人������ѧ ��������ѧԺ������ �人��430070��
2. ��ɳ������ѧ �������е����ѧԺ������ ��ɳ��410114)
ժҪ����Դ��綯������Һ���������ƶ����̻����ƶ����Ķ�̬�������⣬ͨ�����ƶ�����ѧ��ECE R13-H�ƶ�����ķ�������������ȷ�����綯������Һ���������ƶ��İ�ȫ���з�Χ���ڰ�ȫ�ƶ���Χ�ڣ�������������Ȼ�������ΪĿ�꣬�ﵽ�����ƶ�ǿ�ȶ�ǰ�������ֲ������������ƶ��������̣����ɻ����ƶ�������������ƶ�ǿ�ȷֱ�Ϊ0.2��0.3��0.4��0.5��0.6����ʼ����Ϊ16.67 m/s�����ECE-EUDC��·ѭ���������µķ���ѭ�����������������ƶ����������·ѭ��Ƕ��ADVISOR2002�������о������������������1����·ѭ����غɵ�״̬SOC(State of charge)���ԭ�����н����Ե���ߣ���߷��ȴ�4.5%���Ϻõػ������ƶ�����������Ҫ���DZ�֤���ƶ���ȫ�����������Ŀ��Ʋ�������Ч�ġ�
�ؼ��ʣ�
�綯�����������ƶ�����ȫ�ƶ������Ʋ�������·ѭ����
��ͼ����ţ�U461.3 ���ױ�־�룺A ���±�ţ�1672-7207(2011)09-2687-05
Electronic-hydraulic-compound regenerative braking control for electric vehicles
LIU Zhi-qiang1, 2, GUO Xue-xun1
(1. School of Automobile Engineering, Wuhan University of Technology, Wuhan 430070, China;
2. School of Automobile and Mechanical Engineering, Changsha University of Science and Technology,
Changsha 410114, China)
Abstract: The braking force distribution of the compound brake system on small electric vehicles was studied. The safe range of braking force distribution was established by analyzing braking dynamics and the ECE R13-H rule. In the safe braking range, a strategy with optimal energy recovery was developed based on the concept, i.e. braking forces should be distributed on front and rear axles in such a way that the regenerated energy was maximized, as long as the commanded deceleration was reached and neither front nor rear axle was locked. The distribution matrixes of the regenerative braking forces, front and rear hydraulic braking forces were created. A driving cycle was established based on some different braking intensities and ECE-EUDC driving cycle. Simulation on this control strategy was performed in ADVISOR 2002 by establishing an embedded simulation model. The simulation results show that the state-of-charge is progressed by 4.5%, and the proposed control strategy on regenerative braking is effective.
Key words: electric vehicle; regenerative braking; safe braking; control strategy; driving cycle
���綯�������������ͨ��������ղ����ƶ��������������ԵĽ��ܼ������ơ�Ȼ���������ƶ�ϵͳ������Һѹ�ƶ�ϵͳ��ͬ���ã��������������ϴ��ƶ�ǿ���¶��ƶ�ϵͳ��Ҫ����Һѹ�ƶ�ϵͳ������ǰ�������ƶ����ƶ���������ϵ���ɵ���������ͬ���ƶ�̤���г��£����������ƶ���Ӱ�죬��ʹ�ƶ�ǿ����������ͻ�Ʒ������ƣ�Ӱ���ƶ���ƽ���Ժͼ�ʻԱ���ƶ�̤��ĸо�����Һѹ�ƶ�ϵͳ������ǰ�������ƶ����ƶ���������ϵ�ɵ�����������ƶ��������ձ�������ϵͳ�ṹ���Ӹ��ӣ�����Ӳ����Ҫ�����[1-3]���ڴˣ������������ǰ�������ƶ���Һѹ�ƶ���������ϵ�ɵ��ĵ�Һ���������ƶ�ϵͳ[4-6]�����һ�ֿ��Ʋ��ԣ��������ƶ�������ƶ��ȶ��ԵĻ����ϣ��������ƶ��������ա��ѵ�������ƶ������ĵ����ƶ������ƶ�ǿ�Ⱥͳ��ٵĹ�ϵ�Ƴɶ�ά��ѯ���������µ������ƶ�����ģ�飬�����µĵ�·ѭ����������Ƕ����������������Դʵ����NREL(National renewable energy laboratory)��Matlab��Simulink���������¿����ĸ�������������ADVISOR2002[7-9](Advanced vehicle simulator��������������)�������з��������
1 ���綯������Һ���������ƶ���ѧģ��
1.1 ��ȫ�ƶ���Χ
1.1.1 �����ǰ�����ֵ����ƶ�����������
ͬ������ʱ��ǰ�ֵ����ƶ���Fxb1Ϊ��
![]() (1)
(1)
ʽ�У�zΪ�ƶ�ǿ�ȣ�GΪ����������N��bΪ�������������������ߵľ��룬m��hgΪ�������ĸ߶ȣ�m��LΪǰ������ľ��룬m��
�����ǰ�����ֵ����ƶ�������Ĺ�ϵ����(���İ���ͳ�Գ�֮ΪI����[10-11])���ù�ʽ��ʾΪ��
 (2)
(2)
ʽ�У�Fxb2Ϊ���ֵ����ƶ�����N��
1.1.2 ����û�б�����ǰ�ֱ���ʱǰ�����ֵ����ƶ�����ϵ����
����û�б�����ǰ�ֱ���ʱ��ǰ�����ֵ����ƶ�����ϵ���߳�֮Ϊf���飬�ù�ʽ��ʾΪ��
![]() (3)
(3)
ʽ�У�kΪ��̥��·���ĸ���ϵ����
1.1.3 ǰ�ֱ���ʱ���ֱ�����е���С�ƶ���
�ƶ�������ȷҪ���ڳ��������غ�״̬�£����ƶ�ǿ��z����0.15��0.80֮��ʱ�����ḽ��ϵ���������߲�Ӧλ��ǰ���Ϸ���������ϵ��k��0.2~0.8֮��ʱ���ƶ�ǿ��z��0.1+0.85(k-0.2)����ǰ�ֱ���ʱ��Ϊ���ֳ����ȶ����ƶ�Ч�ʣ����ֱ������һ�����ƶ��������ֵ���С�����ƶ�����ǰ�ֵ����ƶ����Ĺ�ϵ���߳�ΪM���ߣ��ù�ʽ��ʾΪ��
![]() (4)
(4)
![]() (5)
(5)
��ȫ�ƶ���Χ��ͼ1�������ı���ABCDA��ʾ��
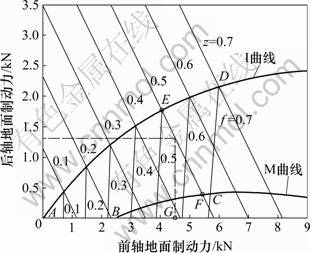
ͼ1 �����ƶ��İ�ȫ��Χ�����Ʋ���ʾ��ͼ
Fig.1 Sketch of safe range of braking and its control strategy
1.2 �ɳ�繦��
�������ƶ��������붯����أ������ƶ����ʲ��ܳ�����ؿɳ�繦�ʣ���������ص����á���ص������ǵ�غɵ�״̬SOC(State of charge)���¶�t�ĺ��������¶Ƚ���ʱ�����������������SOC���������Ҳ����������ͬһ�¶��£���SOC����ʱ���ɳ�繦�����Լ�С��SOC�ֲ���̫С�������طŵ繦�ʼ�С[12]�����������ƶ��������ó������ݻ��գ������ڳ������ݵ��������ŵ�������������С[13]��ʹ������Դ�����䡢�ŵ磬���ƶ��������մ����˺ܴ�ķ��㡣���Ը��ݳ��پ����������ݵ�SOC�����������ƶ����ʺ��ɳ�������״̬�������յĵ������ڼ��ٻ����س�磬ʹ�õ�ص�SOC���ֽ�ƽ��״̬[14]��
Ϊ���п����ƶ����Ʋ������ƶ����ķ��䣬���IJ��о��������ݵ��������⣬�����������㹻�����Կɳ�繦�ʹ���Լ����
1.3 ��������ƶ�
��������������٣����н��ʺ�����Ҫ���������ԣ������������Ժ�ת����������������Ժ㹦���������������ƶ�ʱ�����ڷ����״̬����ת�����������綯״̬�µ�������Ի�����ͬ���ù�ʽ��ʾΪ��
![]() (6)
(6)
ʽ�У�![]() Ϊ�������ת�أ�N?m��PnΪ�������ʣ�kW��nbΪ������٣�r/min��nΪ���ת�٣�r/min��
Ϊ�������ת�أ�N?m��PnΪ�������ʣ�kW��nbΪ������٣�r/min��nΪ���ת�٣�r/min��
�������ƶ�ʱ�����ų��ٽ��ͣ����ת�ٽ��ͣ����෴�綯�ƽ��ͣ������ת�ٽ���500 r/min�������ƶ�����Ϊ0 N�������ƶ�ʧЧ����������������
![]() (7)
(7)
ʽ�У�![]() Ϊ����ת���йص��������ӡ��ɴ˵õ������ƶ�ʱ����ܹ��ṩ�������ִ���������ƶ���Ϊ��
Ϊ����ת���йص��������ӡ��ɴ˵õ������ƶ�ʱ����ܹ��ṩ�������ִ���������ƶ���Ϊ��
![]() (8)
(8)
ʽ�У�igΪ�����������ȣ�i0Ϊ�������������ȣ�rΪ���ְ뾶��m��![]() Ϊ����ϵЧ�ʡ�
Ϊ����ϵЧ�ʡ�
2 ��Һ���������ƶ����Ʋ���
�ڰ�ȫ�ƶ���Χ�ڣ�Ϊ����ȵػ����ƶ��������������¿��Ʋ������̡�
��1�������ƶ���ͼʶ��ģ���ж��ƶ������Ƿ�͡���ǿ���ƶ�����Ϊ�����ƶ�����ת������ƶ����ơ�
��2������ʽ(1)��(2)�����ƶ�ǿ������I���߽���(��ͼ1�е�E��)���������ֵ��������ֵ��Ϊ�����ǰ����������ƶ�����
��3������ʽ(3)~(5)�����ƶ�ǿ������f�����M���ߵĽ���(��ͼ1�е�F��)��
��4������ʽ(6)~(8)�������ܹ��ṩ�������ִ���������ƶ���Freg��
��5��������������ƶ���Freg��E��F 2��ĺ����귶Χ�ڣ���ͼ1�е�G�㣬��ǰ���ƶ���ȫ���ɵ�������ƶ��ṩ����G����Fxb2���ƽ������EF���ཻ�������������ֵ��Ϊ�����ƶ������Ƶ㣻����������ƶ���С��E��ĺ����꣬���������ƶ���������Freg��ǰ��Һѹ�ƶ�����һ�����ƶ���������E������꣬E���������Ϊ�����ƶ������Ƶ㣻���ƶ������С����������ƶ��������������ƶ�������Һѹ�ƶ��������á�
��6���������ƶ����ƣ��������ƶ�������
3 �������
����1�����ǰ�á�ǰ��������Һѹ�ƶ�ϵ�Ĵ��綯�������������������£���������1 187 kg�����ĸ߶�0.5 m�����2.6 m��������ǰ�����1.04 m������ϵ��0.335��ӭ�����2.0 m2����������ϵ��0.009�����ְ뾶0.282 m������ϵ����Ϊ�������ٱ�3.24�����������������ȷֱ�Ϊ3.78��2.12��1.35��0.97��0.76���������Ϊ�������30 kW���ת��89.6 N?m�����ת��4 000 r/min���ת��3 200 r/min��
ADVISOR2002���ƶ������䷽���Ļ���˼·�ǣ��ɳ���ȷ�����ƶ������ٰ����ƶ�������Ϊǰ�����������ƶ�����ǰ�ֵ������ƶ��������泵�������������һά��ѯ������ʽǶ��ģ���У�δ��ֿ����ƶ�ǿ�Ⱥ͵���ƶ��������������յ�Ӱ�죬���ܷ������ƶ�Լ��Ҳ�Dz�ȷ���ġ�
���ݱ��������ƶ������ƶ������䷽�������綯������ƶ������ĵ����ƶ������ƶ�ǿ�Ⱥͳ��ٵĹ�ϵ��ͼ2��ʾ����Ӧ�ĵ��ƶ���ռ���ƶ����ı�����ǰ��Һѹ�ƶ���ռ���ƶ����ı�����ͼ3��ͼ4��ʾ����ͼ3��ͼ4�Ƴɶ�ά��ѯ����Ƕ��ADVISOR2002�������µ������ƶ�����ģ�顣��16.67 m/sΪ��ʼ���٣��ƶ�ǿ�ȷֱ�Ϊ0.2��0.3��0.4��0.5��0.6������·ѭ�������ECE-EUDC��·ѭ����һ���֣�����µķ���ѭ������ͼ5��ʾ����ѭ������ʱ��Ϊ660 s���������Ϊ4.97 km����������ͼ6��ʾ����ͼ6��֪������ADVISOR2002�Ŀ��Ʋ��ԣ���������1����·ѭ����غɵ�״̬SOC��1.00�䵽��0.84�������Ŀ����������ƶ����Ʋ��ԣ���ֿ������ƶ�ǿ�Ⱥ͵���ƶ��������������յ�Ӱ�죬��������1����·ѭ����SOC��1.00�䵽0.88��������غɵ�״̬SOC��ߣ�����Ҫ���DZ�֤���ƶ���ȫ��
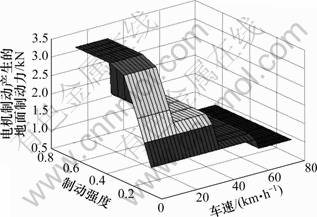
ͼ2 ����ƶ������ĵ����ƶ������ƶ�ǿ�Ⱥͳ��ٵĹ�ϵ
Fig.2 Relationship among force on front wheels from motor and braking intensity and vehicle speed
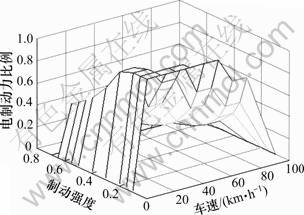
ͼ3 ���ƶ����������ƶ�ǿ�Ⱥͳ��ٵĹ�ϵ
Fig.3 Relationship among fraction of electric braking force and braking intensity and vehicle speed
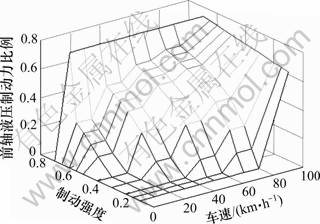
ͼ4 ǰ��Һѹ�ƶ����������ƶ�ǿ�Ⱥͳ��ٵĹ�ϵ
Fig.4 Relationship of fraction of hydraulic braking force on front axle and braking intensity and vehicle speed
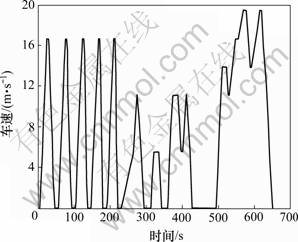
ͼ5 �ó���-ʱ���ʾ���µĵ�·ѭ��
Fig.5 Vehicle speed versus time in a new driving schedule
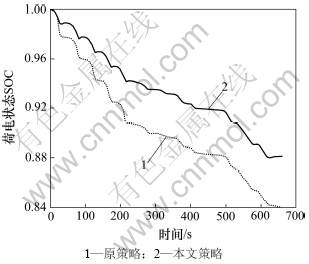
ͼ6 ��غɵ�״̬SOC��ʱ��ı仯����
Fig.6 SOC-time profiles for new driving schedule
4 ����
(1) ͨ�����ƶ�����ѧ��ECE R13-H�ƶ�������о�����������ȷ���˴��綯������Һ���������ƶ��İ�ȫ���з�Χ��
(2) �ڰ�ȫ�ƶ���Χ�ڣ�������������Ȼ����ƶ�����ΪĿ��������ƶ����Ʋ��ԡ�
(3) ������1���µĵ�·ѭ�����ѿ����������ƶ����Ʋ���Ƕ��ADVISOR2002�������з��棬����������綯�����ĵ�غɵ�״̬�õ���ߣ���߷��ȴ�4.5%�����Ʋ�������Ч�ġ�
�ο����ף�
[1] GAO Yi-min, CHEN Li-ping, Ehsani M. Investigation of the effectiveness of regenerative braking for EV and HEV[J]. SAE Paper, 1999-01-2910.
[2] GAO Yi-min, Ehsani M. Electronic braking system of EV and HEV �� integration of regenerative braking, automatic braking forces control and ABS[J]. SAE Paper, 2001-01-2478.
[3] Walker A M, Lamp��rth M U, Wilkins S. On friction braking demand with regenerative braking[J]. SAE Paper, 2002-01-2581.
[4] Ahn J K, Jung K H, Kim D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro- mechanical brake[J]. International Journal of Automotive Technology, 2009, 10(2): 229-234.
[5] Ye M, Bai Z, Cao B. Robust control for regenerative braking of battery electric vehicle[J]. IET Control Theory Appl, 2008, 2(12): 1105-1114.
[6] PENG Dong, YIN Cheng-liang, ZHANG Jian-wu. An investigation into regenerative braking control strategy for hybrid electric vehicle[J]. Journal of Shanghai Jiaotong University: Science, 2005, E-10(4): 407-412.
[7] ��С��, ������, ��ʤ, ��. �������ģ���뷴������ADVISOR�ļ��ɿ���[J]. ��������, 2007, 29(10): 851-854.
ZENG Xiao-hua, WANG Qing-nian, LI Sheng, et al. Development of forward simulation model in ADVISOR[J]. Automobile Engineering, 2007, 29(10): 851-854.
[8] ����, ��Ө, ��˼��. ����ADVISOR�ĵ綯����������ϵͳ������Ӧ��[J]. ���������, 2009, 26(20): 282-285.
GAO Hui-song, HANG Ying, ZHU Si-hong. Development and application of electrictractor simulation system based on ADVISOR[J]. Computer Simulation, 2009, 26(20): 282-285.
[9] �Թ���. �綯���������ƶ��ȶ����о�[D]. �Ͼ�: �Ͼ����պ����ѧ��Դ�붯��ѧԺ, 2006: 58-59.
ZHAO Guo-zhu. Research on braking stability of regenerative braking system in EV and HEV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Energy and Power Engineering, 2006: 58-59.
[10] ��־��. ��������[M]. ����: ��е��ҵ������, 2002: 87-95.
YU Zhi-sheng. Automobile theory[M]. Beijing: China Machine Press, 2002: 87-95.
[11] ʯ����. ���綯�������������ؼ�����������о�[D]. ����: ɽ����ѧ���ƿ�ѧ�빤��ѧԺ, 2009: 87-88.
SHI Qing-sheng. Key technologies in pure electric vehicles energy management problems[D]. Jinan: Shandong University. School of Control Science and Engineering, 2009: 87-88.
[12] Ǽ����, ����ǿ, �ν���, ��. �綯��������������Է���ϵͳ[J]. �Ϻ���ͨ��ѧѧ��, 2009, 43(8): 1196-1200.
QIANG Jia-xi, AO Guo-qiang, HE Jian-hui, et al. Research on the battery simulation system of electric vehicles[J]. Journal of Shanghai Jiaotong University, 2009, 43(8): 1196-1200.
[13] ��¡��, �ƺ���, ¬����, ��. �����������������뽨ģ�о�[J]. ���÷�����, 2010(1): 28-32.
DENG Long-yang, HUANG Hai-yan, LU Lan-guang, et al. The performance experiment and modeling of ultracapacitor[J]. Vehicle Engine, 2010(1): 28-32.
[14] ���Զ, ����. ��������볬�����ݻ������ϵͳ��������[J]. ϵͳ����ѧ��, 2007, 19(1): 101-105.
LI Gui-yuan, CHEN Yong. Design and simulation of hybrid-drive system with battery pack and capacitors[J]. Journal of System Simulation, 2007, 19(1): 101-105.
(�༭ �²ӻ�)
�ո����ڣ�2011-04-18�������ڣ�2011-06-25
������Ŀ������ʡ�������ص���Ŀ(10A005)
ͨ�����ߣ���־ǿ(1970-)���У����������ˣ���ʿ�о����������ڣ�������ȼ�����ܼ��綯�����о����绰��0731-85258630��E-mail: lzq0228@126.com
