
�������ǵ���ϵͳ���г���λ������״�뷢չ
����1, 2���̲���2������1, 2
(1 ������ͨ��ѧ �����ͨ�����밲ȫ�����ص�ʵ���ң�������100044��
2 ������ͨ��ѧ ������Ϣ����ѧԺ��������100044)
ժ Ҫ��
����·�г���λ�е�Ӧ�����Ƴ����������������ǵ���ϵͳ���г���λԭ��������Χ��GPS��GLONASS��GALILEO�ͱ����Ĵ�ȫ������ϵͳ�����ܹ������������ǵ���ʵ����·�г�λ�÷����Ӧ���������ר���͵������ջ���ơ��ഫ���������ںϡ�������ӵ�ͼ�����븨����������밲ȫ�Ա��ϵ�4�������ܽ��˻������ǵ������г���λ�ں������۷����������Ҫ��չ��������δ����չ���ƽ���չ����
�ؼ��ʣ�
ȫ������ϵͳ����·����ϵͳ���г���λ��λ�÷�����
��ͼ����ţ�U284 ���ױ�־�룺A ���±�ţ�1672-7207(2014)11-4033-10
Status and development of satellite navigation system based train positioning technology
LIU Jiang1, 2, CAI Baigen2, WANG Jian1, 2
(1. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China;
2. School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044, China)
Abstract: Starting with the application advantages of global navigation satellite system technology in railway train positioning, principles and requirements of the satellite navigation system based train positioning were analyzed. Based on the current satellite navigation systems including GPS, GLONASS, GALILEO and BeiDou Navigation Satellite System, application of satellite navigation based train positioning technology at home and abroad was roundly introduced. From the aspects of specific satellite navigation receiver design, multi-sensor information fusion, track map generation and assistance, and assurance of integrity and safety, main research progress of this field was summarized at the theoretical-methodological level. Finally, prospects of the future development were presented correspondingly.
Key words: global navigation satellite system; railway transportation system; train positioning; location-based service
��ǰ�ҹ���·���䴦�ڸ��ٷ�չʱ�ڣ���֧����·ϵͳ���з�չ���ڶ�֧�ż����У�λ�÷�������ʾ������Ҫ�ԣ��ر����¹ذ�ȫ���г����п��ơ�����ָ�ӡ���ȫԤ����λ��Ӧ��ϵͳ����ȷ��ʵʱ�����г�λ��������״̬�������ʵ���������г�ֻ�����ڹ̶�����ϣ���·��·�����г����еĿռ䷶�룬ʵ��ʹ�õ��г�λ��������·�̶�λ��Ϊ��㣬����·���������һά�������������һά���Ե��г���λ��ʽ��������ѡ�����·������ˮ�˴���������������ȴ��ڹ��������ԡ���ͳ�г���λϵͳ�㷺���ò��ٲ�ʽ����һά����ϵ�½��ٶȡ�λ������ͳһ������ѡ��װ���г����������ϵ��ٶȴ�����ʵ���ٶ�/��������������������ܸ��ţ�ʱ�������Թ㷺Ӧ���ڸ����г���Ȼ����������·���ܻ����ִ�����չ�����ϵͳ�ṹ�����������ӣ��г������ٶȼ�����ȼ��������г���λ��Ҫ��Խ��Խ���̣����ֿ�ת����ĥ�ĵ��ٶȴ��������ٶ�λ����Լ����������λϵͳ�Ż���������Ҫ��Ӧ�������������״���Դ������������������ȷ�ʽ�µ��г���λ�������ϲ���[1]���ԡ�Ӧ����+�ٶȴ�������Ϊ���������ģʽ�ɹ�Ӧ���ڸ�����·��Ȼ�����߰��Ľ���ά���ɱ�������ɱ�������֮���ì�ܣ���Լ�������Լ�����Ч���ʵ�֡���������չѸ�ٵ����ǵ�����λ����ʵʱ���߾��ȡ�ȫ�������Եõ��㷺��ע��Ӧ��[2]���������ѽ��ɰ���GPS��GLONASS���ҹ������������ǵ���ϵͳ���ڵĶ��ȫ������ϵͳ(global navigation satellite system, GNSS)���������ŷ��GALILEOϵͳ�Լ��ձ���ӡ�ȵȹ���������ǿϵͳ�������ǵ���ϵͳ�����г���λ�����ܹ�ʹ�г���λ�������ٶԵ����豸��������ʵ�ֵͳɱ�������������ƣ������ִ���·��ȫ/�ǰ�ȫӦ�÷���ķ�չ��Ҫ�����ǵ���ϵͳ���г���λ�����Ӧ���ܹ��������������Դ��ͻ�����ƣ�����Ż��ڶ���·ϵͳ����λ�õ�Ӧ�÷��������о���Ա�ڻ������ǵ������г���λ�����뷽�����濪չ�˴���������ȡ���������м�ֵ�ijɹ���δ���������ǵ�����Դ�IJ��ϳ�ʵ������ϵͳ���ɡ������Ż���������չ�ȶ������õ������������Ч�á��������߽������ǵ���ϵͳӦ�����г���λ��ԭ����������з��������������⼼����չ���о���չ����������δ���������չ����
1 �г����Ƕ�λԭ��������
�������ǵ���ϵͳ��ģʽ�£��Ը����˶�������˲��λ����Ϊ��֪�������ݣ����ÿռ������᷽����ȷ���г����ؽ����������ڿռ�λ�á�Ϊ��һ������г���λ�Ը��Ӽ������źŽ��������뻷������Ӧ�ԣ����ø��������������ǵ�����λ���������һ�ֱ�Ȼѡ��ͼ1��ʾΪһ�ֵ��͵Ļ��ڶഫ�������ɵ��г���λϵͳ�ṹ��
���г���λ�Ŀռ�������������ͬ�ڳ����·�����ڶ�ά�ռ��е��������ԣ��г��ڼȶ������·�ϵ����п��Կ���һ�֡���Լ�������������з�ʽ����Ҳ������г���λ�ĵ����ص㣬����Ϊ����3�㣺
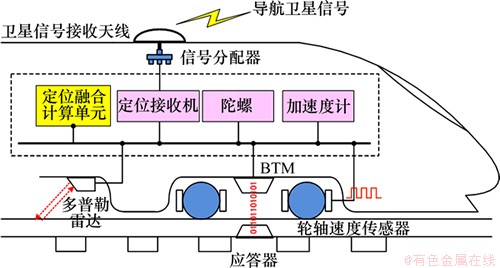
ͼ1 �������ǵ������г���λϵͳ���ͽṹ
Fig. 1 Typical system structure of satellite navigation system based train positioning
1) ����ϵ���巽ʽ���г�λ����һ��һά���λ�ã�ͨ���ڹ������ij���̶��ο��㽨���ع����һάλ�òο�����ϵ�������г������ڷ�����òο������Ծ��������г�λ�á�
2) ����ϵ��Ӧͳһ�����ǵ�����λ���ͨ������������ϵ�µ���ά�ռ�����λ�ã���ˣ������г�λ�������ͨ������任�Է��Ϲ������ϵԼ����ͼ2��ʾΪ�����·ijվ������ͼ��վ��ʾ��Ķ�Ӧʵ����Ϊ��֤λ�������ڶ�ɵ����������µ�Ψһ�ԣ�ͨ������·����λ��Ϊ������ͳһ���塣
3) ��ȫ�Խ��ܹ�������ȫ����·ϵͳһ�л����Ҫǰ�ᣬ�г�λ�����������·ϵͳ��ȫӦ�þ��н�����ϵ�����г����п���Ϊ�������������г�ǰ�ˡ����λ��������һ���İ�ȫԣ�����Ӷ��γ�һά��ȫ���磬���Ͷ�λ�IJ�ȷ���Զ�λ����ϢӦ�ð�ȫ��Ӱ�졣
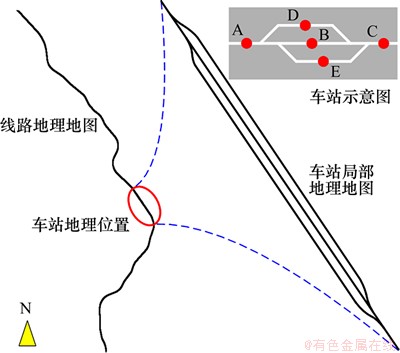
ͼ2 ��·��·������ͼ��ʾ��ͼ�Ķ�Ӧ
Fig. 2 Corresponding relationship between the geographical railway track map and schematic diagram
�г���λ���Ը������ǵ����µ�Ӧ����������ͬ���г�λ��Ӧ�ö��г���λ�������ر����ڶ�λ���ܷ��棬��ȫΪ����ǰ�����չ��������棬������ȷ�ԡ�����ԡ������ԡ������Լ����Ƕȵȡ�����·�ɿ��ԡ������ԡ���ά���ԺͰ�ȫ��(reliability, availability, maintainability and safety, RAMS)����֮��Ĺ��������г���λӦ�������ԡ��������ǵ������г���λ��Ӧ�����ܿ����ͼ3��ʾ��ͼ3[3]��ȫ�ԺͿ�����Ϊ���������˻������ǵ������г���λ��Ӧ�����ܿ�ܣ���ȷ�����ǵ�����λ��������·RAMSָ����ϵ��Ĺ�ϵ����ЩĿ��Ҳ�ٽ����ڶ���ؿ�ѧӦ����������������Ż����о�����
2 ������Ӧ���뷢չ
����GPS�ķ�չӦ�ã��������翪չ�����ǵ�������·��λ������о������������20����80�����ARES(advanced railroad electronics system)���������GPS������Ӧ����Ķ�λ��ʽ[4]��20����90������ڿ�չPTS(positive train separation)�ƻ����Բ��ù�����������DGPS��ת�ټƼ������ͼ�����г���λϵͳ�Ŀ����Խ����˳��ԡ�ͬ�ڣ�����DGPS���ٶȴ������������ͼ����ǿ���г�����ϵͳ(incremental train control system��ITCS)�ɹ����������������й����Ĵ�����һЩ���ܶ���·�ϵõ�ʵ��ʹ�á������DGPS���ٶȴ����������ӵ�ͼ���г���λϵͳ���ڿ��������У���NAJPTC�ƻ���[5]��21�����������������ڷֽ�ʵʩ��·�г���ײ����ϵͳ(collision avoidance system, CAS)�����ù����ָ���GPSΪ��·�ͻ����估�ֳ�������Ա�ṩ��ȫ����[6]��
ŷ����20����90������������ȫ�����ǵ���ϵͳ�ļƻ�����չGALILEO���ǵ���ϵͳ��������·��ȫ������ΪGALILEOϵͳ��չӦ�÷������Ҫ�����ر������г����Ʒ��棬Ϊ�����ӪЧ�ʡ����������밲ȫ�ԣ�������Ӫ�ɱ���������·��������ETCS-LC(European train control system-low cost)�ƻ����������ǵ������ɶ��ִ������������ETCSλ�þ���ϵͳ(location determination system, LDS)��ŷ���Ⱥ���������ƻ������ǵ�����·������ȫӦ������ļ������Ƚ���̽������APOLO[7]��GADEROS[8]��INTEGRAIL[9]��LOCOPROL[10]��RUNE[11]��GRAIL[12]��ECORAIL[13]��DemoOrt[14]�ȡ�Ϊ�˶Լ����г����ٲ��ģʽ�γɻ�������ʵ�ֽ�������չ���滮��3���εķ�չ���ԣ���ͼ4��ʾ������ʵʩ���ǵ�������ϵ��Ӧ�á��������ǵ�����ҵ��ģ����չ�����ǵ���ϵͳ��ŷ����·����ϵͳ�ڶలȫӦ���еõ��˸������ӣ���ߴ����Ե���2010��¹������RCAS(railway collision avoidance system)�ƻ�[15]�����ڵ��ӵ�ͼ�������ǵ���ʵ�־�ȷ�г���λ����δ�����ǵ�������·ϵͳ�еĽ��Ӧ������Ҫ���ƶ����á�

ͼ3 �������ǵ������г���λ��Ӧ�����ܿ��
Fig. 3 Performance frame of satellite navigation based train positioning and application
ͼ4 ŷ�������ǵ������г���λ������չ����
Fig. 4 Developing strategy of satellite navigation-based train positioning technology in Europe
����˹�̳�ǰ����1976�꿪ʼ������GLONASSϵͳ����������ǿ�˶������ǵ���ϵͳ�IJ����ά�����������������ǵ���������·�г���λ������1992�꣬Ī˹��COMPASS��ƾ���GLONASS���ǵ���ϵͳ�����ϣ���Ī˹����·���������Ͽ��������ǵ��������豸��������֤ʵ�����г�λ�ù�����Ӧ�����ǵ����Ŀ����ԡ��ڴ˻����ϣ���1997���������г���ȫ�豸KLUB-U������GPS/GLONASS�����豸��������·��ͼʵ�־�ȷλ�ü�⣬2002���������ڶ���˹��·��ǧ�л����ϰ�װʹ��[16]��
���ű�������ϵͳ���ٷ�չ���ҹ��Ѿ߱����������ǵ���ϵͳ���ƿ����������������ǵ�����ҵ�ڶ��Ӧ������ķ�չ����·������Ϊ��ҪӦ������֮һ�������ڷ�չģʽ�Լ���ȫ���ԣ����ǵ���δ���㷺�����ҹ���·ϵͳ������ϵ������һЩ������Ҫ��ϵ͵�Ӧ���б����ɣ����ڻ����ۺ�����ͨ���豸������GSM-R��450 MHzͨ��Ƶ����л���[17]��2006�꿪ͨ�������·����������Ȼ����������������������ITCS�п�ϵͳ�����ò��GPS��λ���������г���λ��ռ�ü�顣Ϊ��ЧӦ��GPS�����г����ƵĿɿ��ԡ���ȫ�Լ����������⣬�ҹ�����������ʼ���ǵ���ϵͳ������·ϵͳ����ع���[18]��
�ݹ۵�ǰ�������Ҫ���ǵ����������й�����·�г����Ƕ�λ�����Ӧ����״�����ǵ���ϵͳ��Դ��������չ����·ϵͳ���ܻ����ִ����ķ�չ����ͬ�ٽ������ߵĽ�ϣ�δ�����ǵ�������չ����·�г���λӦ���Dz��ɱ���ı�Ȼ���ơ��������ǵ���ϵͳʵ���г���λ���ܡ����ܼ�Ӧ����չ����ĺ������ۡ����������Ǿ����䷢չ�Ĺؼ����ء�
3 �о���չ
3.1 �г���λר�������ǵ������ջ����
���ǵ������ջ���Ϊ���մ������������źŵĹؼ��豸����������·�г���λʵ�ʹ����У��������Ϣ���ԡ���ȫ�Լ�Ч���Խ����������ơ�Filip��[19]���ڼ���ʼ�����ǵ���������·�г���λ����Ҫ��������ܽᣬָ������·��·�Լ������ȹؼ�λ�ó��������ź�ä���Ŀ����Լ���ȫ�Է��գ����������ǵ������г���λ����Ӧ�Լ�Ӧ�Դ�ʩ��Marais��[20]����PREDISSAT���߶��г����л����������źŶྶģ�ͼ�����ģ�ͽ����˷�����Polivka��[21]���������ǵ��������г��İ�ȫ���գ���SIS(Signal-In-Space�������ź�)���������ơ��ྶ��SIS��֤ʧЧ����Ÿ��ŵȡ�Wiss��[22]�����ǵ������г���λӦ�������������й��ɣ��γ���GNSS��·��λӦ�ü���������ָ�����ļ�����Щǰ�ڹ����ɹ�Ϊ���ǵ���ר�ý��ջ���ؼ��������Լ�ʵ�û��ṩ����Ҫ���ݡ�
�������Ӳ���ṹ�����ǵ������ջ����������Լ�Ӳ�������ԣ����Թ��ܽṹ�����㴦�����Ƚ�������Ե�����Ϊ�������г���λ�Ľ��ջ�����Ӧ����Ӧ���Ż����о���Ա�����������ջ�˼�룬�����������ṹʵ�ֲ��������������Ӳ��װ����������źŽ��մ������ܣ��Խ�Ϊ��������ֶζԽ��ջ��ڲ��Ĵ����������ܽṹ����������Bertran��[23]�������г��豸������Ӳ��GPS���ջ��ĵ�Ÿ����������֤���������ջ��г���λ�����ı�Ҫ�ԡ���ǰ��[24]���ʵ���������г���λ���������ջ��ṹ�����źŻ���������������[25]������ǿ����Բ��걸��������˽����������������ǡ�˫�Ǽ����Ƕ�λ�㷨�����г���λ�������Լ���Ҫ��
�г���λר�����ǵ������ջ�������У����г�λ��Ӧ�õ���Ч�������һ��Ҫ����ŷ��GALILEO FP6��ܵ�Grail�ƻ����״��������·������ȫ���ջ���(rail SoL receiver)�ĸ������·ϵͳ�ṩ������ȫ����(service-of-life��SoL)�����ĽǶȳ�������������ǵ������г����п��ƵȰ�ȫ����ϵͳ��Ӧ�ù淶��ר�ü���[26]�����⣬����������ǵ�����·�г���λӦ�õ���ز�����֤ƽ̨��̳��֣���CaRail��PREDISSAT (PREDIctive software for satellite availability in the field of transport)���ߵ�[27]��Ϊ���ǵ���δ������·���������Ӧ���γ������õļ�����������������·��������Ľ��ջ�רҵ�����г�����չ������Ҫ�ƶ����á�
3.2 ���ǵ�����ഫ�����������ں�����
�����ʵ�ֻ������ǵ������г���λϵͳʱ��Ϊȷ���ڲ�ͬ���������¾��������г���λ������Ҫ����ʵ�����Ϊ�����ø�������������Ӧ���г����п������ٵĶ��Ӽ�����������������������ѡ���������ڶ��г�λ��״̬�����ɻ�ȫ�������ڲ�����IJ��䣬��ξ������ھ���������������ȡ�����ܶ�λ����ǹؼ����⡣�ഫ���������ںϼ���Ϊ��һ�����ṩ����Ч���˼·����Ŀ�����ڸ����ض�����Զ��ִ������ĸ�֪��Ϣ�����ۺϴ������Ӷ��õ��Կ�Ŀ���ͳһ��������ʶ��
�г���λ��������ѡ��ֱ�Ӿ����ںϹ���������ϵͳ������ģ�ͣ��Ӵ�������ϲ����Ͽ������Dz�ͬ��Ϣ��Դ�Ļ������������ԣ��κ��ܶ����Ƕ�λ���ܵ����ܽ�����������ֹ���в����ĸ�֪��Դ�������ڹ�����϶�λϵͳ���������������������Ӿ������˹�դ�������Ķ������ͷ���������̽������[28-29]������ں�������ģ����Ϣ�任���ṹ�����Ȳ��Ե�ѡ��Ҳ�ٽ��ڶ��г����Ƕ�λ���������IJ�����
���������ǵ���������������������Ͻṹ���Ե�����£��˲����������ö�Դ��Ϣ���ض�״̬����ȷ�б����Ҫ;���������������ϵͳ��Ҷ˹���Ʒ��������γ����ڶ�ɹ�����Ҷ˹������δ֪�����������������ʹ��������ʺ͵�ǰ�۲���Ϣ���������ʣ�����Э��������Ϣ�͵�ǰ��Ϣ��ͳһ���[30]��Kalman�˲���Ϊ��Ҷ˹���ƻ��ڸ�˹�������������ϵͳ�е�һ�־�����ʽ���������ڶ��г���λϵͳ���о���������[31]��Ȼ��������Kalman�˲���Ӧ�Է����ԡ��Ǹ�˹������Լ������ʹEKF��UKF��CKF�ȷ������˲������������г���϶�λ�ںϡ���Monte-Carloģ��Ϊ�����������˲���Ϊһ����Ҫ����Ҳ�������г���϶�λ��ȷ���˲����ƶ�ʵ���г����л����Ǹ�˹�����߱��Ƚ��Ĵ�������[32]�����⣬�����г���λ��Ϣ��֧���ض�Ӧ��ʱ�İ�ȫ�����ԣ�³�����Ʒ���Ϊ���ϵͳ�Թ��ϡ����ż���ȷ�������ص����������ṩ����Ч;��[33]���ںϹ������۷����ķ�չ��δ�����������г���λӦ�õĽ���в������ഴ�·���
3.3 ������ӵ�ͼ���ɼ������г���λ����
�����г�λ�õĿռ�����ԣ�������ӵ�ͼΪ����������һά���������ϵ��ӳ���ṩ����Ч;���������ͼ��ij����֯ԭ�����ݿ⣬�Թ����·����λ���ڲ�ͬ������ϵ�µı�����������������γ����ơ��ֵ䡱�IJ������ã����о������ڴ��ģ�������ݴ���[34]�����ݿ��[35]����·��������[36]�Լ�Ч������[37]�ȷ��棬�������Դ��ڷ�չ�Ρ��������WCRM��LOCOPROL��OpenTrack��ITCS�п�ϵͳ�Ⱦ��Թ�����ӵ�ͼ������̽������Ŀǰ��δ�γ�ͳһ����RailML������·���ӵ�ͼ�淶�ӿ���ʽ�����ƶ�����[38]���ӹ�����ӵ�ͼ��Ӧ�ò����������г���λϵͳ���õĵ�ͼ��ϢӦ�÷����Ե�ͼ���ӵĸ����������о��������á����ݵ�ͼ��Ϣ�ڶ�λ�������е������Ȳ�ͬ�����Խ��仮��Ϊ2����Ρ�
���ȣ���ͼƥ����Ϊ�����ĵ�ͼӦ��ģʽ�����г���λ���ṩ��һ����ɢ��ϲ�εĸ���������Ŀǰ���γ��˻�����·���˷��������ƶȡ����������ȶ��ֲ�ͬ���ļ��㷽��[39]�������·��·�ڳ�վ��������ڶ�ɵ�����������������ӵ�ͼ������Ϊ�ɵ�ʶ���ṩ�˸��ŵ�ѡ���������Ʒ�ģ��[40]��Hausdorff����[41]�ȷ���Ϊ���ռ��ʶ��ȷƥ���ṩ�˿���˼·����Σ����ǵ�ͼ��Ϣ�붨λ�����������Ķ����Ժ�����ͬһ�ԣ����Խ���ͳһ�����ںϹ��ƹ��ɽ�����ϸ���������Zheng��[42]���ò�ͬ���ȵȼ��Ĺ����ͼ��Ϣʵ�ֽ�����г���λ����������[43]����˵�ͼ�����г���λ����ģ�ͣ���Ч������г���λ�Ե��������ź���������Ӧ������
�����ù����ͼ����ʵ���г���λ�Ĺ����У������г�λ��Ӧ��ģʽ��Ӧ�Կ��ǣ�����Ӧ����(virtual balise, VB)����һ�ֶ��صĵ�ͼ������λ��ʽ��������·���˽��䶨��Ϊ��һ��ͨ����������GNSS��ϵ�Ԫ��λ��Ϣ��ʵ��Ӧ�������ܵij���ϵͳ��[44]������Ҫ����������������·�豸�淶����ݣ��������Ƕ�λ������Ѵ洢Ӧ����λ�õĵ��ӵ�ͼ���С����Ⲷ���Ӷ��������Ӧ�����豸���ܡ�����[45]������ŷ��GADEROS�ƻ�������Ӧ����ԭ�������ṹ����Ʒ�����������������Ӧ���������㷨�����ı��Ƶȷ�����о��ɹ�[46]����Щ������Ϊ�ҹ�������չ�������ǵ�������·��ȫӦ���ṩ��Ч�����ο���
3.4 �г����Ƕ�λ������Լ���ȫ�Ա���
����������ȫ����·ϵͳӦ�÷���Բ������ǵ���ʵ���г���λ������Լ���ȫ�������ʮ���ϸ��������̵�Ҫ��������밲ȫ�ԴӲ�ͬ���淴ӳ���г���λϵͳ���㰲ȫ���Ӧ����������������г���λ���ڹ�������������ԴӲ��Է�������������ϵͳ�����ܹ���״̬��ȷ�Լ�����ˮƽ�Ŀ��ų̶�[47]�������Ķ�λ���̰�����������Ϣ��ȡ���ںϼ���ͼ���������������õĶ�λ����Լ�ⷽ��Ҳ��������ԡ�
���г���λ��������Ϣ��ȡ�����У�����Ա��ϼ��ֱ�������ڴ�����ԭʼ�������ܵĹ����쳣��Filip��[48]�Բ����������Ĺ��ϼ�ⷽ����������ƣ�Mirabadi��[49]������ö��˲����в��2������г���λ���������ϼ�ⷽ�������⣬С���任�����ɷַ�����ͳ�Ƽ���Ȼ����źŴ������������г���λ���ϼ���ܸ�Ϊ����ȡ�ý������������ܺ�������[50-51]�����г���λ�����������ںϹ��̣����ñ���ˮƽ�����Ŷ�ˮƽ�ȱ�������״̬��Filip��[52]���һ�ֶ�λ��������Լ��(locator autonomous integrity monitoring, LAIM)���������ø������ݹ����˲���ͳ��������������ԣ���һ��[53]���˲��в���չ���г���ȫ������ȷ���г���λϵͳ�������ˮƽ�����⣬�����Ʒ��Slope�ȶ��ַ�ʽ�����ܹ���ø��걸������Ա�������[54]�����г���λ�ĵ�ͼ����У�����̣���������������λ������ܹ���Ч���ⲻȷ���Դ��������ѣ�Jana[55]�������ƥ��ƫ��ͳ�����Լ��������Լ��(position integrity monitoring, PIM)������Zheng[56]�����ջ���������Լ�ⷽ��ֱ�����ڽ���Ͻ���ģ�ͣ�ʵ�ֶԵ�ͼ������λ���̵�һ�廯��⼰������Ż���
���г���λ�����ڱ������������ǵ��������г���λ��ϵͳ���Լ�����ģʽ����·ϵͳ���г�λ�÷��������֮�仹����һ�����죬�Զ��߽���ͳһ�������ǵ�������·�г���λ�����Ӧ���ر����ڹ�����·��Ӫ��Ҫǰ��İ�ȫ�Է�����о��������塣ŷ�˳����������GALILEOϵͳ��·Ӧ�õİ�ȫ��������֤����ȡ������Ҫ�ɹ����������ǵ�������·������ȫ����Ӧ�õİ�ȫ�Ը���̽��[3]����ʽ����ģ����[57]����֤��ϵ���[58]������������֤[59]�Լ����ǵ�������·RAMS������ϵͳһ����[60]�ȡ���������ȫ��������ģ��[61]����·ϵͳ��ȫ���˼�������ٽ������ǵ����ڰ�ȫ����ϵͳ��ơ���������֤�����Ŀ�ѧ�Ժ淶�����ڲο���֤�����ϣ���DemoOrtϵͳ[62]�Ͳ�������ƽ̨CaRail[63]��Ϊ������Ӧ�ÿ����ɹ�Ϊδ�������ǵ�����·��λ��ȫӦ�õIJ��ԡ�У�ˡ���֤���ṩ����Ҫ��ƽ̨����������
4 δ����չչ��
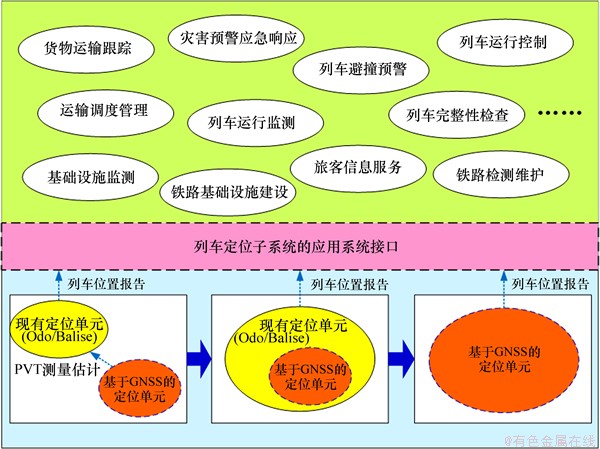
��10�������ҹ���·���䴦�ڸ��ٷ�չʱ�ڣ����ҡ�ʮ���塱�滮��ȷ��δ���ҹ���·������̵���ҪĿ�꣬�Ը�����·��������������·Ϊ�����Ľ��跢չ�滮Ϊ���ǵ���ϵͳ����·����ij�Զ�����ṩ�˹ؼ��Ľ��Ի�����Ϊ�ҹ��������ղ����ñ������ǵ���ϵͳ����˽��������������Ҫ���ǵ�����Դ���й����ڻ�������Ӧ��̽�����Ȳ�ʵʩ����ҲΪ�ҹ������������ǵ���ϵͳ��һ���˲�ҵ����·����ϵͳ�ĺ����ںϴ�������Ҫ���ⲿ������ս����ս��δ���ڻ������ǵ�������·�г���λ����������������һ�������Ҫ����������4�����档
1) ��ģ����ϵͳ�ļ��ݲ��á����ǵ���������GPS��GLONASS��GALILEO�ͱ����Ĵ�ȫ���Ե���ϵͳΪ����������ǿ����ϵͳΪ�����ȫ��֣�����ϵͳ��Դ�IJ��ϷḻΪ��·�г���λӦ���ṩ�˸�Ϊ��ֵķ�չ��������ģʽ����ϵͳ�ṩ��ϢԴ���ϸı��˴�ͳ�����ڵ�һ���ǵ���ģʽ��ƶ�źš����ź����ơ���һĿ���ʵ�����������г���λ����Чʵ�ֶ�ģʽ���ǵ���ϵͳ���ݡ�����Ԥ�����г���λר�����ǵ������ջ��ļ������Ż�����ؼ������ݵ�ͻ�ƣ������ǵ�������·ϵͳ��չӦ�ý����µı�Ȼѡ��
2) ����ϢԴ�ĸ���϶��ںϡ�Ŀǰ���ǵ��������г���λ�Ķ�Դ�����ں��У���������Ͻṹ���ںϷ�����ռ��Ҫ��λ�������Ѷ���ϢԴ���������ھ�ľ����ԡ����Ŷഫ���������ںϼ����IJ��Ϸ�չ�ͳ��죬ͨ����Ϊ���ܵ����̬�ƽ����ֿ�����Դ��������ӵ�ͼ����Ϊͳһ���壬ʹ�ںϹ����봫����������������һ�廯��ϣ�����������ʵ�ָ����ɻ����ں���������Ч�������ǵ������ź�ȫ�ڱΡ�ǿ���Ż��������ٵ��������ʶȽ�������Լ�⡢��ͼ����У���Ȳ��Եĸ����ԣ��Ӷ���һ���̶��ϻ����г���λ����Դ�����������ѡ�����ƣ�ʹ�ͳɱ��г���λ����ʵ��Ӧ�ó�Ϊ���ܡ�
3) λ��Ӧ�õ�����������չ�����������г���λ�������ǵ�������Ҫԭ����������ɫ������������ǵ���ϵͳ��������г���λ����Ӧ��ϵͳ������������Ҫ��չĿ�꣬������2�����ں�����һ����������ϵͳ�����г���λ�ܼ����������ǵ�������Դ�����ԣ����г���λ���ڶలȫ���Ӧ�þ����ش�ս�����壻������������ǵ������г�λ��Ӧ���ܹ���Ч����Ե����豸���������������·���з�ʽ�ڽ��衢ά���ȷ������ʮ�����Եĸ��ӳɱ����ơ����⣬������Ӧ�����Ļ����Ͻ�һ����չ�Լ���ģʽ���ܵ����⻯�ͼ����ԣ����Դٽ��г���λ����Ӧ�õ���������ʵ�û����л����ƶ����á�
4) Ӧ�ð�ȫ�ԵĹ淶��ͳһ�����ű�������ϵͳ����·ϵͳ��Ӧ�ý��̵ļӿ죬�������Եؿ�����ȫ�ο��������ǵ���Ӧ��Ч�ܽ��к���������淶���Ǵ��о�̽��������ʵ��Ӧ�ù��̵ı�Ҫ;������һĿ���ʵ����Ҫ��������Ƚ������ֶβ�������л���������ʺ����ҹ���··���Լ��������ǵ���ϵͳ�����Եĺ�������������ӦӦ��ϵͳ����ơ����������ԡ���������֤��ȷ�ϵ���������ȫ���̣��д����γ�ͳһ���淶��������Ч�IJ��Բο�ƽ̨���Ż����۷������⽫�Ӱ�ȫ��һ��·ϵͳ����Ŀ�����ʵ��������ϵ�����ƣ�Ҳ��Ϊ���ǵ���ϵͳ��������������γɲο���ֵ��
5 ����
1) �Ի������ǵ���ϵͳ���г���λ�������о���չ����״������ϵͳ���ܽᡣ���ǵ�����Ϊ��Ҫ��ս����Դ������·����ϵͳ��λ�÷���Ӧ��������������к϶Ⱥ�ǿ���ķ�չDZ����
2) ��·ϵͳ�ִ��������Լ��������ǵ���ϵͳ���ٷ�չ��˫�ض�������ʹ��һ������о���������Ӧ�ù�������δ��ʱ�ڵõ����ٷ�չ��������༫��������ǵ���ϵͳ��Դ���ɿ��š����ݵĶ�Ԫ��֣��γ���������������
3) ���õ��ⲿ�����Լ����е����ڷ�չ������Ҫ���г����Ĵ��º�ͻ�ƣ��Լ����ҹ������������ǵ���ϵͳ����ȫ�����ǵ�����ҵ�����λ��ͬʱ��Ӧ���ں����ƶ��ҹ���·������ϵ���ľ������Ľ�һ���������̡�
�ο����ף�
[1] Filip A, Bazant L, Mocek H, et al. Dynamic properties of GNSS/INS based train position locator for signalling applications[C]// Proceeding of 8th International Conference on Computer System Design and Operation in the Railway and Other Transit Systems, Southampton: WIT Press, 2002: 1021-1030.
[2] Hegarty C, Chatre E. Evolution of the global navigation satellite system (GNSS)[J]. Proceedings of the IEEE, 2008, 96(12): 1902-1917.
[3] Filip A, Beugin J, Marais J, et al. Safety concept of railway signalling based on Galileo safety-of-life service[C]// Proceedings of 11th International Conference on Computer System Design and Operation in the Railway and Other Transit Systems, Southampton: WIT Press, 2008: 103-112.
[4] Craven P. A brief look at railroad communication vulnerabilities[C]// Proceedings of 7th International IEEE Conference on Intelligent Transportation Systems, Piscataway: IEEE, 2004: 245-249.
[5] Federal Railroad Administration. The North American joint positive train control (NAJPTC) project[EB/OL]. [2009-04-05]. http://www.fra.dot.gov/downloads/Research/rr0905.pdf.
[6] Federal Railroad Administration. Alaska railroad collision avoidance system (CAS) project[EB/OL]. [2009-08-16]. http://www.fra. dot.gov/downloads/research/rr0916.pdf.
[7] Filip A, Mocek H, Bazant L. GPS/GNSS based train positioning for safety critical applications[J]. Signal and Draht, 2001, 93(5): 51-55.
[8] Urech A. Galileo demonstrator for railway operation system - project overview[R]. Madrid: European Commission, Directorate General Energy and Transport, 2002: 1-4.
[9] Bedrich S, Gu X. GNSS-based sensor fusion for safety-critical applications in rail traffic[EB/OL]. [2009-01-02]. http://www. galileo-services.org/library/2.1-Bedrich.pdf.
[10] Simsky A, Wilms F, Franckart J. GNSS-based failsafe train positioning system for low-density traffic lines based on one-dimensional positioning algorithm[C]// Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies. Noordwijk: European Space Agency, 2004: 1-8.
[11] Albanese A, Marradi L. The RUNE project: the integrity performances of GNSS-based railway user navigation equipment[C]// Proceedings of 2005 ASME/IEEE Joint Rail Conference, Piscataway: IEEE, 2005: 211-221.
[12] Jenkins B, Urech A, Prieto M. GNSS introduction in the rail sector[C]// Proceedings of IET Seminar on Global Navigation Satellite Systems. Stevenage: Institution of Engineering and Technology, 2007: 143-155.
[13] Thevenot V, Bruckmueller T, Doederlein C, et al. ECORAIL: A step towards safe railway controlling systems based on satellite positioning[C]// Proceedings of the 2003 European Navigation Conference. Graz: European Group of Institutes of Navigation, 2003: 1-18.
[14] Becker U, Hansel F, May J, et al. Concept of vehicle autonomous localisation for railway application[C]// Proceedings of 6th International Conference on ITS Telecommunications. Piscataway: IEEE, 2006: 326-330.
[15] Lehner A, Muller F, Strang T, et al. Reliable vehicle-autarkic collision detection for rail-bound transportation[C]// Proceedings of 16th ITS World Congress and Exhibition on Intelligent Transport Systems and Services. Brussels: Intelligent Transportation Systems and Services for Europe, 2009: 1-8.
[16] Zorin V. Satellite technologies for railway traffic control[J]. The RZD-Partner International China, 2008, 1(3): 30-31.
[17] �����, ���㳼, ����, ��. ����GPS��CIR���Ƕ�λ��Ԫ���[J]. ����ͨ���ź�, 2012, 49(5): 65-68.
XU Chenglong, TIAN Xiucheng, HAN Zandong, et al. Design of GPS-based CIR satellite positioning module[J]. Railway Signalling & Communication, 2012, 49(5): 65-68.
[18] ����. ����GNSS���г���λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 3-16.
WANG Jian. Research of the train positioning technologies based on GNSS technology[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2007: 3-16.
[19] Filip A, Bazant L, Mocek H, et al. Satellite navigation based railway signalling concept[C]// Proceedings of International conference of COMITE. Prague: European GNSS Agency, 2001: 1-20.
[20] Marais J, Berbineau M, Heddebaut M. Land mobile GNSS availability and multipath evaluation tool[J]. IEEE Transactions on Vehicular Technology, 2005, 54(5): 1697-1704.
[21] Polivka A, Filip A. Satellite-based positioning for CBTC[C]// Proceedings of 2nd International Conference on Reliability, Safety and Diagnostics of Transport Structures and Means. Pardubice: University of Pardubice, 2005: 293-300.
[22] Wiss J, Barbu G, Frosig P, et al. Requirements of rail applications[EB/OL]. [2000-05-01]. http://etcs.uic.asso.fr/docs/ specifications/etcs_lc_satellite.pdf.
[23] Bertran E, Delgado-Penin J. On the use of GPS receivers in railway environments[J]. IEEE Transactions on Vehicular Technology, 2004, 53(5): 1452-1460.
[24] ��ǰ��. GPS��Ƶ�źŷ��������źŲ����ٷ����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 36-43.
LIANG Qianhao. Study on GPS IF signal simulation and weak signal acquisition, tracking algorithm[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2008: 36-43.
[25] ����. һ�ֻ������Ƕ�λ���г�����Լ�鷽���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 24-32.
AN Yi. Research of train integrity monitoring method based on GPS[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2008: 24-32.
[26] Marradi L, Foglia L, Franzoni G, et al. Girasole receiver development for safety of life applications[J]. Signals and Communication Technology, 2008, 2: 313-327.
[27] Poliak P, Marais J, Hansel F, et al. Methods and tools for the certification of GALILEO localisation for railway applications[C]// Proceedings of 8th World Congress on Railways Research. Paris: International Union of Railways, 2008: 1-8.
[28] Geistler A. Robust velocity measurement for railway applications by fusing eddy current sensor signals[C]// IEEE Intelligent Vehicles Symposium, Piscataway: IEEE, 2004: 664-669.
[29] ������, ����ǿ, ʷ��÷, ��. ���ڵ���ͼ��Ĺ�쳵λ��У�������о�[J]. ����ѧ��, 2011, 33(12): 72-77.
GUO Baoqing, ZHU Liqiang, SHI Hongmei, et al. Research on track inspection car position correction method by use of single image[J]. Journal of the China Railway Society, 2011, 33(12): 72-77.
[30] Chen Z. Bayesian filtering: From Kalman filters to particle filters, and beyond[J]. Statistics, 2003, 182(1): 1-69.
[31] ������. GPS/INS����г�ʵʱ��λ��Ϣ�ںϷ����о�[C]// �й����ѧ����ߴ�ȫ����Ա�������. ����, 2001: 494-499.
ZHANG Xianzhou. Research on the real-time information fusion strategy for GPS/INS integrated train positioning[C]// Proceedings of 7th National Congress of Chinese Society for Geodesy Phatogrammetry Cartography. Beijing, 2001: 494-499.
[32] ������, ɣ����, ��ΰ. �Ľ��������˲����г���϶�λϵͳ�е�Ӧ��[J]. �й����Լ���ѧ��, 2009, 17(6): 701-705.
GAO Shesheng, SANG Chunmeng, LI Wei. Application of improved particle filter to integrated train positioning system[J]. Journal of Chinese Inertial Technology, 2009, 17(6): 701-705.
[33] ����, �̲���, ����, ��. ����CKF��GNSS/INS�г���϶�λ³���˲��㷨[J]. ��ͨ���乤��ѧ��, 2010, 10(5): 102-107.
LIU Jiang, CAI Baigen, TANG Tao, et al. CKF-based robust filtering algorithm for GNSS/INS integrated train positioning[J]. Journal of Traffic and Transportation Engineering, 2010, 10(5): 102-107.
[34] Chen D, Fu Y, Cai B, et al. Modeling and algorithms of GPS data reduction for the Qinghai-Tibet railway[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 753-758.
[35] ����, �̲���, ����, ��. ����GPS���пع����ͼ�������ɷ����о�[J]. ���ѧ��, 2011, 40(1): 111-117.
LIU Jiang, CAI Baigen, TANG Tao, et al. Research on GPS based track map data generation method for train control[J]. ACTA Geodaetica et Cartographica Sinica, 2011, 40(1): 111-117.
[36] ������, �����, ��ȫ��. ������·��������ƽ���㷨[J]. ���ѧ��, 2004, 33(3) : 195-199.
DING Keliang, LIU Dajie, ZHOU Quanji. Adjustment algorithm for realignment of the existing railway curve[J]. ACTA Geodaetica et Cartographica Sinica, 2004, 33(3): 195-199.
[37] Chen D, Tang T, Cao F, et al. An integrated error-detecting method based on expert knowledge for GPS data points measured in Qinghai-Tibet railway[J]. Expert Systems with Applications, 2011, 39: 2220-2226.
[38] Gerlach K, Horste M. A precise digital map for GALILEO based train positioning systems[C]// Proceedings of 9th International Conference on Intelligent Transport Systems Telecommunications, Piscataway: IEEE, 2009: 343-347.
[39] Jiang Z. Digital route model aided integrated satellite navigation and low-cost inertial sensors for high-performance positioning on the railways[D]. London: University College London. Department of Civil, Environmental and Geomatic Engineering, 2010: 158-168.
[40] ����, �Ż�, �̲���, ��. ����HMM���г����ռ���Զ�ʶ���㷨�о�[J]. ����ѧ��, 2009, 31(3): 54-58.
WANG Jian, ZHANG Hui, CAI Baigen, et al. The algorithm of automatic track occupying identification based on HMM[J]. Journal of the China Railway Society, 2009, 31(3): 54-58.
[41] �̲���, ��ϸ��, ����, ��. �г����ռ���Զ�ʶ���㷨[J]. ��ͨ���乤��ѧ��, 2010, 10(6): 111-126.
CAI Baigen, YAN Xihui, WANG Jian, et al. Automatic identification algorithm of train track occupancy[J]. Journal of Traffic and Transportation Engineering, 2010, 10(6): 111-126.
[42] Zheng Y, Cross P. Integrated GNSS with different accuracy of track database for safety-critical railway control system[J]. GPS Solutions, 2012, 16(2): 169-179.
[43] ����. ���ֹ����ͼ�������г���λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 35-43.
LI Chong. Research on train positioning method aided by track digital map[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2008: 35-43.
[44] Barbu G. Virtual Balise functional requirement specification[R]. Utrecht: European Rail Research Institute (ERRI), 2002: 10-16.
[45] Garcia M. On-board location subsystem requirement specification[R]. Madrid: Galileo Demonstrator for Railway Operation System (GADEROS), 2003: 13-22.
[46] ���ž�, ����, �̲���. ����GNSS������Ӧ�����о�[J]. ����ѧ��, 2008, 30(1): 104-108.
ZHANG Yajing, WANG Jian, CAI Baigen. Research of virtual Balise based on GNSS[J]. Journal of the China Railway Society, 2008, 30(1): 104-108.
[47] ����. ����³���������۵��г���϶�λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2011: 16-20.
LIU Jiang. Research on robust estimation theory based train integrated positioning method[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2011: 16-20.
[48] Filip A, Maixner V, Mocek H, et al. Fault diagnosis in high integrity GNSS based train position locator[C]// Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies. Noordwijk: European Space Agency, 2004: 1-8.
[49] Mirabadi A, Mort N, Schmid F. Fault detection and isolation in multi-sensor train navigation systems[C]// Proceedings of UKACC International Conference on Control, Piscataway: IEEE, 1998: 969-974.
[50] �ŷ�. �г���϶�λϵͳ���ϼ��������㷨���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 19-27.
ZHANG Feng. Research on fault detection and isolation of integrated train positioning system[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2007: 19-27.
[51] Liu J, Cai B, Tang T, et al. A PCA based fault detection and isolation method for train locating system[C]// Proceedings of International Conference on Information Technology for Manufacturing Systems, Clausthal-Zellerfeld: Trans Tech Publications, 2010: 688-693.
[52] Filip A, Taufer J, Mocek H, et al. The high integrity GNSS/INS based train position locator[C]// Proceedings of 9th International Conference on Computer Aided Design, Manufacture and Operation in the Railway and Other Advanced Transit Systems, Southampton: WIT Press, 2004: 497-506.
[53] ��һ��. ����GNSS ���г���λ�������о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 34-39.
TANG Yizhe. Research in GNSS based train positioning integrity[D]. Beijing: Beijing Jiaotong University. School of Electronic and Information Engineering, 2007: 34-39.
[54] Liu J, Tang T, Cai B, et al. Integrity assurance of GNSS-based train integrated positioning system[J]. Science China Technological Sciences, 2011, 54(7): 1779-1792.
[55] Jana H. GNSS train position integrity monitoring by the help of discrete PIM algorithms[J]. Journal of Applied Mathematics, 2009, 2(3): 73-80.
[56] Zheng Y. Improving positioning accuracy and integrity in rail safety-critical applications through the integration of GNSS with a track data base[C]// Proceedings of 20th ION GNSS International Technical Meeting of the Satellite Division, Red Hook: Curran Associates Inc., 2007: 1456-1465.
[57] Horste M, Ptok B, Schnieder E, et al. A case study for the automated system development: the satellite-based train control system[C]// Proceedings of IFAC Conference on Control Systems Design. Kidlington: Elsevier Science, 2000: 329-334.
[58] Hansel F, Poliak J, Schnieder E, et al. Framework for certification of GALILEO for railway applications[EB/OL]. [2006-01-26]. http://www.railway-research.org/IMG/pdf/298.pdf.
[59] Mocek H, Filip A, Bazant L. Verification of quantitative requirements for GNSS-based railway applications[C]// Proceedings of 12th International Conference on Computer System Design and Operation in Railways and Other Transit Systems. Southampton: WIT Press, 2010: 711-722.
[60] Beugin J, Filip A, Marais J, et al. Galileo for railway operations: question about the positioning performances analogy with the RAMS requirements allocated to safety applications[J]. European Transport Research Review, 2010, 2(2): 93-102.
[61] Beugin J, Marais J. Simulation-based evaluation of dependability and safety properties of satellite technologies for railway localization[J]. Transportation Research Part C, 2012, 22: 42-57.
[62] Hartwig K, Grimm M, Horste M, et al. Requirements for safety relevant positioning applications in rail traffic: A demonstrator for a train borne navigation platform called ��DemoOrt��[EB/OL]. [2003-12-12]. http://elib.dlr.de/21252/1/wcrr.pdf.
[63] Poliak J, Beisel D, Becker U, et al. Satellite based localisation system for secondary railway lines[J]. Mechanics Transport Communications, 2007, 3: 11-16.
(�༭ �Կ�)
�ո����ڣ�2013-12-15�������ڣ�2014-03-23
������Ŀ(Foundation item)�����ҹ��ʿƼ�����ר���ʽ�������Ŀ(2014DFA80260)��������Ȼ��ѧ����������Ŀ(U1334211, U1234205, 61403021)���й���·�ܹ�˾�Ƽ��о������ƻ���Ŀ(2013X001-A-2)�������У��������ҵ���ר���ʽ�������Ŀ(2014JBM003) (Project(2014DFA80260) supported by the International Science & Technology Cooperation Program of China; Project(U1334211, U1234205, 61403021) supported by the National Natural Science Foundation of China; Project(2013X001-A-2) supported by the Technological Research and Development Program of China Railway Corporation; Project (2014JBM003) supported by the Fundamental Research Funds for the Central Universities)
ͨ�����ߣ�����(1985-)���У����������ˣ���ʿ��ʦ���������ܽ�ͨ�����ǵ�����·Ӧ���о����绰��010-51684361��E-mail: jiangliu@bjtu.edu.cn
ժҪ����GNSS��������·�г���λ�е�Ӧ�����Ƴ����������������ǵ���ϵͳ���г���λԭ��������Χ��GPS��GLONASS��GALILEO�ͱ����Ĵ�ȫ������ϵͳ�����ܹ������������ǵ���ʵ����·�г�λ�÷����Ӧ���������ר���͵������ջ���ơ��ഫ���������ںϡ�������ӵ�ͼ�����븨����������밲ȫ�Ա��ϵ�4�������ܽ��˻������ǵ������г���λ�ں������۷����������Ҫ��չ��������δ����չ���ƽ���չ����
[17] �����, ���㳼, ����, ��. ����GPS��CIR���Ƕ�λ��Ԫ���[J]. ����ͨ���ź�, 2012, 49(5): 65-68.
[18] ����. ����GNSS���г���λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 3-16.
[24] ��ǰ��. GPS��Ƶ�źŷ��������źŲ����ٷ����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 36-43.
[25] ����. һ�ֻ������Ƕ�λ���г�����Լ�鷽���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 24-32.
[29] ������, ����ǿ, ʷ��÷, ��. ���ڵ���ͼ��Ĺ�쳵λ��У�������о�[J]. ����ѧ��, 2011, 33(12): 72-77.
[31] ������. GPS/INS����г�ʵʱ��λ��Ϣ�ںϷ����о�[C]// �й����ѧ����ߴ�ȫ����Ա�������. ����, 2001: 494-499.
[32] ������, ɣ����, ��ΰ. �Ľ��������˲����г���϶�λϵͳ�е�Ӧ��[J]. �й����Լ���ѧ��, 2009, 17(6): 701-705.
[35] ����, �̲���, ����, ��. ����GPS���пع����ͼ�������ɷ����о�[J]. ���ѧ��, 2011, 40(1): 111-117.
[36] ������, �����, ��ȫ��. ������·��������ƽ���㷨[J]. ���ѧ��, 2004, 33(3) : 195-199.
[40] ����, �Ż�, �̲���, ��. ����HMM���г����ռ���Զ�ʶ���㷨�о�[J]. ����ѧ��, 2009, 31(3): 54-58.
[41] �̲���, ��ϸ��, ����, ��. �г����ռ���Զ�ʶ���㷨[J]. ��ͨ���乤��ѧ��, 2010, 10(6): 111-126.
[43] ����. ���ֹ����ͼ�������г���λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2008: 35-43.
[46] ���ž�, ����, �̲���. ����GNSS������Ӧ�����о�[J]. ����ѧ��, 2008, 30(1): 104-108.
[47] ����. ����³���������۵��г���϶�λ�����о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2011: 16-20.
[50] �ŷ�. �г���϶�λϵͳ���ϼ��������㷨���о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 19-27.
[53] ��һ��. ����GNSS ���г���λ�������о�[D]. ����: ������ͨ��ѧ������Ϣ����ѧԺ, 2007: 34-39.
