
�ȳ�����װ���ϻ��Ӿ�ϵͳ�������ʵ��
�ƽ����������������
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժҪ������ȳ�����װ���Ϲ����ж��������ص㣬ȷ���������Ӿ��Զ����������ڶԶ�����ɫ����״��LED��Դ����ʵ��ԱȵĻ����ϣ���ƻ���LED��Դ�뵥��LED�����������ϵ�������ʽ��ʹоƬ�������������һ���ұ��漸�������������Ӿ�������HexSightΪ���ģ����ô����ο���ʵ�ֲ�ͬĿ���ʶ�𣬲���2��CCD������Ŀ��Ʒ��������Ż���ͨ���������ʶ�����Ե�������������������ʵ����1 mm��1 mm�ı�����8�����оƬΪ�������Ӿ�ʶ��ϵͳ���ۺ�������������Ӿ�ʶ��ϵͳ����оƬ����ʱ�Զ�λ���ȵ�Ҫ��
�ؼ��ʣ�
�ȳ�����װ�����������Ӿ���HexSight�Ӿ���������������
��ͼ����ţ�TP242.6+2��TP271+.4 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2007)01-0116-06
Design and realization of machine vision system in
thermosonic flip-chip bonder
LI Jian-ping, ZOU Zhong-sheng, WANG Fu-liang
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: For accurate alignment is very crucial in the process of chip package, the structure of vision alignment system in automatic thermosonic flip-chip bonder was presented. Based on experiments on various color and style LED lights, the single-color LED illumination composed of a ring LED light and some LED lamps was adopted to get uniform luminance within visual field. The vision software was developed based on HexSight, the method of recognition of different objects(chip & substrate), control of two CCD cameras and key points of creating model for chip and substrate were presented. According to the recognition error of translation by experiments on scale 1 mm��1 mm chips, the composite position error of the vision system was calculated, the result demonstrates that the precision of this vision alignment system satisfies the bonding process of scale 1 mm��1 mm chips with 8 bumps.
Key words: thermosonic flip-chip bonding; machine vision; HexSight software; error analysis
���ŵ������칤�յĽ�����Ԫ�����ͻ�����װ�ĸ��ܻ������ٻ���������ҵ�������豸���˶��ٶȺ;��ȵ�Ҫ��Խ��Խ�ߡ��ִ����������豸�Ķ�λ�����Ѵﵽ2~5 ��m����һ�����������豸�Ķ�λ���Ƚ�С��1 ��m[1-2]����������������λ���ȣ���ͳ��е�����豸��ճ�Ӻ�װ�м�������ʵ�֡����ִ����������豸�У�оƬ�����ϵĺ����ڹ���̨�ϵľ�ȷλ��ֻ��ͨ���Ӿ�ϵͳʵ������ȷ��[3-5]����ˣ��Ӿ���λ�����Ѿ���Ϊ�����豸��һ��ؼ�������������Ӿ���λϵͳ��Ӳ���ṹ��ƺ��Ӿ���λ�����Ŀ�����
���ȳ�����װ���Ϲ�����, �ؼ�������оƬ��ͻ��庸�̵Ļ������������/����㶨λ�Ͷ��������Ҫ��С��5 ��m��Ϊ�ˣ��������߸����ȳ�����װ���Ϲ��յ��ص��Ҫ���Ӿ�ϵͳӲ���ṹ��������ƣ�������Adept��˾��ͼ��������������HexSight�����һ�����Ӿ���λ���������оƬ������庸�̼侫ȷ��.
1���ȳ�����װ���Ϲ�������
�ȳ�����װ������ʹ�õ�оƬ�������ͼ1��ʾ��оƬʵ�������ߴ�(������)Ϊ1 mm��1 mm��������8�������㡣
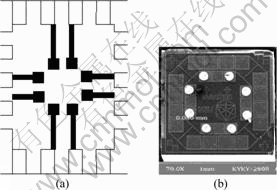
(a) ����ʾ��ͼ��(b) оƬ
ͼ1���ȳ�����װ�����е�оƬ�����
Fig.1��Die and substrate in thermosonic flop chip bonder
�ȳ�����װ���Ϲ������̿��Է�Ϊ5�����裬��ͼ2��ʾ��
a. оƬʰȡ���ڿ�ʼ���Ϲ���ǰ��оƬ���泯�������ֱ������ָ������̨������̨��װ����תƽ̨�ϣ���תƽ̨��װ��1���˶�ƽ̨�ϡ���оƬ����岻��CCD�ӳ�Χ�ڣ���ϵͳ�����˶�ƽ̨����ָ���㷨����оƬ����壬����ȡоƬ�����λ�ú��ݻ���ڷ�״̬������оƬλ�ã���������ѹ����ϵͳ��ʹ������ļ���ͷ����оƬ�����ø�ѹ��оƬ����Ȼ����������ͷ�����оƬʰȡ��ͬʱ�����������ϵͳ����������ȵ�160 ������[6-8]��
b. оƬ�������� ���оƬʰȡ�����Ӿ�ϵͳ�����£������˶�ƽ̨�ƶ������оƬ����� ����
c. ʩ�Ӽ���������оƬ���������¼���ͷ��ʹоƬ������庸�̽Ӵ���Ȼ����������ѹ������ϵͳ����оƬ����ʩ�Ӽ���ѹ��������������£�оƬ���������ƽ�У�����������巽��ֱ��
d. ʩ�ӳ����������������ﵽԤ��ѹ����оƬ������庸�̽Ӵ������Ρ���ʱ������������������������ͨ������ˡ����ߺ�оƬ�����ڼ��Ͻ����ϣ�ʹ���뺸�̽�Ͻ��淢��Ħ������ȥ��������������Ⱦ�㣬���һ���������Ρ�������庸�̵�ԭ�����ɢ���γɼ���ǿ��[9-14]��
e. ����ͷ��λ���ڼ�����ɺ������ͷŸ�ѹ, оƬ��������룬�������ߣ����1���������ڡ�
2 ���ϻ��Ӿ�ϵͳ��Ӳ�����
�Ӿ�ϵͳ��һ����Զ�����ģ�飬��������ͨ��PCI�ֲ�����������ͼ������ͨ�����ߴ����������Ӿ������������پ�����ϵͳ���������ϻ��Ļ�е�˶�ϵͳ���Ӿ�ϵͳ�����²�����ɡ�
2.1����ѧϵͳ
��ѧϵͳ��Ҫ��һ��1���������ᄉ��������Ŀ��Ĺ��߾۽���CCD���������������ϡ�CCD�����������dz����У���ˣ���CCD����ͷ��װ�����ݶ�����ϵͳУʱ��ͨ����ת�����ݶ�ʹ����ﵽ���Ч�����ڼ��ϻ����������в��ܶ������е��������������оƬ�ı�����еġ����ڻ��弴ʹͼ���뽹Ҳ�������ߵ�����࣬���ڻ����оƬ����൱��ͼ���뽹��ͼ������Ӱ�첢���Ǻ����أ����Ҵ�ϵͳ��ͼ���뽹��һ����������Χ��
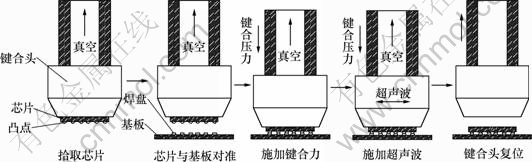
ͼ2���ȳ�����װ���Ϲ��չ���
Fig.2��Process of thermosonic flip-chip bonding
2.2��CCD�����
CCD�������ͼ��ɼ���ǰ�����������ɹ��������ܾ������й��ɣ�ͨ����һ��˳�����ÿ�������ܵĵ�ѹ���壬ʵ�ֽ�ͼ����ź�ת���ɵ��źŵ�Ŀ�ġ�����ĵ�ѹ�������п���ֱ����RS-170��ʽ�������ʾ�������������������ڴ������ֵ��������
2.3�������ݲɼ���
ͼ�����ݲɼ����ü��ô�Matrox��˾���Ƶĺڰ�ͼ��ɼ���Matrox Meteor-��/Standard���ÿ�ʵ����ǿ��֧��CCIR��RS-170��PAL��NTSC����Ƶ��ʽ������֧��6·Y/C�ź������12·������Ƶ�ź����롣ͼ�����ݾ�PCI����ʵʱ���䵽������ڴ����ʾ����Ϊ����������PCI����ͻ����������еĶ�ʧ�����ϼ�����4 M��ͼ�����ݻ��塣�˿�֧��VMChannel�������߽ӿڣ�����֧���ⲿ���������ԣ��������������Ĺ�����ʽ����ͼ��ɼ���
2.4������ϵͳ
������Ӱ���е�Ӿ�ϵͳʶ�ȵ���Ҫ���أ���ֱ��Ӱ������ͼ�����ݵ�������Ϊ�ﵽ���Ч��������ѡ����ʵ�����װ�úͰ�װλ�á�����װ�ð��������Ϳ��Է�Ϊ�ɼ���Ͳ��ɼ��⡣���ɼ�����Ҫ��ָX���ߡ��������ȣ���ҪӦ����ijЩҪ��ߵļ�����������Բ�۸�ϸߣ����ԣ���ʵ��Ӧ���У��Զ�ѡ�ÿɼ�����Ϊ��Դ����ϵͳ����LED��Ϊ������Դ����ͼ3��ʾ���˹�Դ����ͨ�ɼ����Դ��Ⱦ����ȶ��Ըߡ�ʹ�����������ɱ��͵��ŵ㡣��װʱ���û���LEDǰ����������Χ���ö��LED����и���������ͨ���Բ�ͬ��ɫ(��ɫ����ɫ����ɫ����ɫ)LED�ĶԱ�ʵ�飬֤����ɫ��ԴЧ����ѣ��ɼ�����оƬ������ͼ�����������Ϣ�ḻ��ͼ������Ӱ������һ�¶�����������������LED��Դ��LED����ö���������·����ϵͳ����ʱ���Էֱ�������ʹ�ɼ�ͼ��Ч����ѡ�
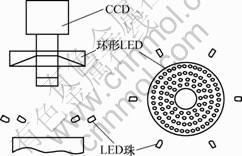
ͼ3��LED��Դ�ṹ
Fig.3��Structure of LED illumination
2.5��ͼ��ϵͳ�IJ���
�������ϻ�����2������ͷ�ֱ��ڲ�ͬ������оƬ�ͻ������ͼ�����ݵIJɼ�������ͷ1��װ��z��̶�֧���ϣ����������Ϲ����в����κ��˶���ΪоƬ��ȡ��оƬ�����������ṩ�ο�ԭ�㣬����ȡ�ͼ���ǰ������оƬx��yλ�á���ת�Ƕ���ģʽ���ж�Ӧͼ��λ�ˡ�����ͷ2��װ��оƬ����̨�ͼ��Ϲ���̨֮�䣬��оƬ��ȡ���ȡоƬƫ��������Ի������С������
2.6��ͼ��������
ͼ����������������Adept��˾�����ܻ����Ӿ�����������HexSight�Ļ����ϱ��Ƶģ����������ü���������λԭ���������ظ�����Ϊ1/40���أ���ת�ظ�����Ϊ0.01?�������ڼ���(10 ms)ʱ������0~360?��Χ��Ѱ�Ҷ����ܿ��پ�ȷ��ʶ����������ģʽ�����ⲿ��Դ���ȷ��������Ա仯��оƬ����ֲ����ִ������ʱ�Կ��Ծ�ȷ��λ��
3�����ϻ��Ӿ������Ŀ���
��HexSightΪ���������Ӿ����������IJ�����ͼ4��ʾ��

ͼ4��ϵͳ��������
Fig.4��Development course of system
3.1������HexSightӦ��ԭ��
HexSight�ṩ�ķḻ�Ĵ������̾���װ��ActiveX�ؼ��У�Ӧ�ÿ���һ��������ActiveX�ؼ��й���һ���������Ӿ����������������ͨ������ÿؼ���������ô��������
��ActiveX�ؼ����뵽�����У��ؼ����ԣ�����Ӧ�ó�����������ʹ�òɼ��豸������ȡͼ��λ������ͼ����ж�λ����ͼ��ɼ��������̣�����ͼ��ɼ��豸���ͣ�ϵͳĬ��ͼ������ԴΪ���Դ���ģ��ͼ��⡣ͼ�����ĵ�λ�����أ����˶�ϵͳ�в��ó��ȵ�λ����ˣ�����ʵ�������볤�ȵ�λ�Ļ��㣬���òɼ��豸�����м��ɵ�ͼ��У���ܣ����ݿ�������Ҫ��mm��inch��Ϊ��λ���ʶ������ͬʱ����/������Ұ��ͶӰ���(��ͷ�뱻���治��ֱ��������)�;�ͷ��������Լ���������תʱ��ɵ����ػ���[15-18]��
3.2������ģʽ�Ĵ���
HexSight�ǻ���ģʽ���Ӿ�ʶ��������������ģʽ�༭���н�����ʶ�����ģʽ��ſ���Ӧ�ö�λ����(HSLocator)��ɶ�������������������ȡ��������Ϊ���ϵͳ��³���ԣ�������������ģʽʱӦע�����¼��㣺
a. Ӧ������ϵͳ����ѧϵͳ�����������»�ȡͼ��
b. ģʽͼ��Ӧ���е�һ�ԡ�
c. ͼ��Ӧ�������ִ�ʶ�����ͬ�ļ�������������
d. ģʽ��ʹ�õ�ͼ������(�ߴ硢��״)�����Ǻ��ͼ�����ȶ���Ԫ�ء�
ͨ����HexSight�Ӿ����������о������������������ģʽ��Ϊ���༴����������������ϸ������ǰ����Ҫ��ɶ���������������ʹֶ�λ����ʶ�ȵ������ͨ��������ʵ�ֵġ���ˣ���ν�ͼ������������������з�������Ҫ�ģ���Ч��ֱ��Ӱ�쵽ϵͳ�Ķ�λ���ȡ���Ӧ�ٶȺ��ȶ��ԣ���Ӧ����ģʽ�����Ľ����ͼ5��ʾ��������������������ͽ�����ɣ���ϸ����������������������������оƬ���IJ�λ�Ķ�λ��־��ʵ�������������ô�ģʽϵͳ��λʱ���Ϊ30 ms��
(a) ����������(b) ��ϸ����
ͼ5���Ż��������ģʽ
Fig.5��Optimized modes of search
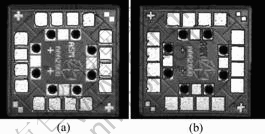
3.3��оƬ������ʶ����̵��Ż�
��оƬ���Ϲ����У���Ҫ��3����������ɶ����ʶ��λ�����ȣ�����̨ʰȡоƬʱ��оƬ���ж�λ�����Ƽ���ͷ��оƬ��������Σ��ڹ���̨�����̨֮�䣬����оƬ��λ��־��оƬ���о�ȷ��λ�������оƬʰȡ���λ�ã��Ի���λ�ý��е������Բ�ͬ�����ʶ��Ӧ������Ӧ��ģʽ�⣬��3��ͼ���ģʽ�ֱ���3��ͼ����н���ģʽ����ʶ������ͼ��ɼ���ϵͳ����Ҫ���ݵ�ǰ����ȷ��������ص�ͼ��⣬��ʱ�ͱ������HexSightϵͳ�������ĵ�ǰ�������̵������ļ�����˲�����Ӵ�ϵͳ���������һ��ϵͳ�պ���Ч�ʵ���������谭���ڱ�Ӧ���У���3��ͼ���ģʽ��ͬһ��ģʽ���н�������ϵͳ��ʼ��ʱͬʱ���أ�ͨ���ڸ�ͼ��ģʽ�����Ӳ�ͬ�����IJο��㣬������ǰ��������ɶ�λ��������HexSight��GetInstanceReferencePoint- Count���������ص�ǰ����ģʽ�ı�ʶ����Ŀ�����ò�ͬ�Ĵ����ӳ���
3.4��˫��������Ʒ������о�
��ϵͳ�������2��CCD����ͷ�ֱ��ڲ�ͬ��ʱ�̶�ͼ����вɼ�������ͬһ��ϵͳ�ж����Բ�ͬ�������ͼ�ν���ʶ��λ����ˣ��漰ϵͳ���Ϊ��2�������������Դ�����ʱ����һ����з�������⡣����������£�
a. ϵͳ�ֱ�ʹ��2��HexSight�ؼ���ÿ��������ɲ�ͬ�ؼ����ƣ��ڽ���HexSight�ؼ�֮ǰ���з��롣CCD����ͷ���Ʒ���A��ͼ6��ʾ��
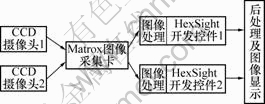
ͼ6��CCD����ͷ�Ŀ��Ʒ���A
Fig.6��Control method A of CCD camera
b. ϵͳʹ��1��HexSight�ؼ�����2������ͷ���Կؼ���̽�����룬��ͼ7��ʾ��
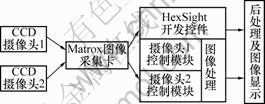
ͼ7��CCD����ͷ���Ʒ���B
Fig.7��Control method B of CCD camera
����Aʹ��2��������HexSight�ؼ������ԣ�ͼ���ڲɼ���ֱ�2����ͬ�����ݴ洢������ͼ����������Ҳ��Զ�������ʾ��ͼ�������ڴ��в�ͬ������Դ������ϵͳ�����ϴ�������ÿ��CCD����ͷ��ʱ��Ҫ���¼��ؿؼ������ü���Ӧ���ݡ�����B�в���ͬһ��ͼ�����ݿ�ʹ������̣���ͼ�����ݿ��ͼ�����ʵʱ��ʾʱ��Ϊ�ǵ�ǰ�CCD����������ݣ��ǻCCD����ͷ�����ݽ������ǣ���ʾͼ�ò������¡��ڱ�Ӧ����2����ͷ��ͬʱ������ͨ��������ʾ��ͼ��ˢ�µ�ʱ�̣�ģ��2������ͷʵʱ��ʾ����ˣ����÷���B�ȿ�ʵ��ϵͳ����Ҫ���ֿɼӿ�ϵͳ��Ӧ�ٶȡ�
3.5���Ӿ�������
���Ӿ����������ֳ�2�����ֱ��Ӧ��ϵͳ��2������ͷ�����ݴ���ϵͳ���������ԵĴ������������ͨ�������˶���Ԫ���¼������ɼ�������ͼ��ɼ�����ͼ�����ʶ��λ������оƬ��ģʽ���б�ͼ��ģʽx��y������ת�Ƕȣ�ָ������ͷʰȡоƬ����ȡ����λ�ý�������任�����оƬ�����Ķ���2������ͷҲ����ͨ����������ư�ť�ֱ����ʶ��ʵʱ��ʾ���������õȹ������Ա����ڳ�ʼ��ʱ��ϵͳ���е�����
4�����ȷ���
4.1���������
ͨ���Զ����������ݷ������֣���ϵͳ�������ȷ������ظı�ʱϵͳ�Կ���ʶ�𣬵��Ƕ�λ���Ƚ��ܵ�Ӱ�죬��ϵͳ����ʶ��ķ�Χ�ڣ���λ�����1������������ˣ���ϵͳ�����ڼ�Ӧȷ��һ������������ȣ����ϵͳ��λ���ȡ������ǶԽǶȡ�x����ƫ�ƽ��ж�ζ�λ������[19]�ķ��������
ÿ���������2 500�Σ�ȡ��ƽ��ֵ��Ϊ��ֵ����ʶ��ϵͳ���ȶ��ԺͶ�λ���Ƚ��з������Գ�ʼλ��(����������������ģʽ��ʱ����λ��)��2������ڷ�λ�˽��в�����������λ����������ͬʱΪ��һ����С����ÿ����5����10���������ȡƽ��ֵ��ʶ��λϵͳ����ת��x����ƫ��������1�ͱ�2��ʾ��
4.2���ۺ����
�ڼ��Ϲ����У�����λ�õ�ƫ�����ۺ���������
��1���Ӿ�ϵͳ��ת��λ���
Table 1��Rotation error of machine vision
positioning system
Table 2��Translation error along x direction of machine
vision positioning system
��ƽ��������ת�����ۺ�Ӱ�������ֶ�ʵ������8����оƬ���ۺ������м��㡣
��ת��������й�ʽ���㣺
����ת�����x���y��ķ���Ϊ��
��ת����ƽ������������ۻ�Ч������2�����ɷ��������ܵ����eT��x���y�����������ex��ey����ʽ���㣺

���ۺ����Ϊ��
![]() ��
��
���ݵ����������Ľ��ȡÿ���е���������룬��LΪ500![]() ��m����Ϊ45?ʱ���Ӿ�ϵͳ�ۺ�������3��ʾ��
��m����Ϊ45?ʱ���Ӿ�ϵͳ�ۺ�������3��ʾ��
ͨ�����ۺ����ĶԱȷ������Եó���ȡ5��ƽ��ֵ����ۺ�����뵥�β������������Լ�С�����ۺϿ���ʶ���ٶȺ�ʶ�ȵĻ����ϣ�ϵͳ���ö�
��3 �Ӿ�ϵͳ�ۺ����
Table 3 Composite position error of machine position
vision system
�����ɼ���5������ȡƽ��ֵ����Ϊʶ�����������
5���ᡡ��
a. ���ȳ�����װ���ϻ��Ӿ�ϵͳ�������о�������˶�ϵͳ��Ӳ���ṹ��������Դ��
b. ����HexSight�����˼��ϻ������������Ӿ���ģ�飬����˶����ʶ�𡢶���������Ƶı�̿��Ʒ������ܽ�������ģʽ���ԭ���Ҫ�㡣
c. ʵ�����н�����������ȳ�����װ�����Ӿ�����������е�����ģʽ����λʱ���Ϊ30 ms��
d. ͨ����ʶ�����ĵ��������ۺ����ķ�����������5����������ƽ��ֵ��Ϊʶ�����������ʶ������ȷ�Ժ��ȶ��ԣ�����8��оƬ�ȳ�����װ���Ϲ����ж��Ӿ���λ���ȵ�Ҫ��
�ο����ף�
[1] ��۽��. ���ӷ�װ��оƬ���Ӽ��������豸�ķ�չ[J]. ���ӹ�ҵר���豸, 2000, 29(4): 5-10.
GE Mai-chong. The development of chip bonding techniques and its equipment in microelectronics packaging technologies[J]. Equipment for Electronic Products Manufacturing, 2000, 29(4): 5-10.
[2] Rao R, Eugene J T, Alan G R. ���ӷ�װ�ֲ�[M]. �й�����ѧ����ӷ�װרҵίԱ����. ����: ���ӹ�ҵ������, 2001.
Rao R, Eugene J T, Alan G R. Microelectronic packing handbook[M]. Microelectronic Packing Electronic Commission of Chinese Institute of Electronics. Beijing: Electronics Industry Press, 2001.
[3] �ܳ���, �š��, ����, ��. װ��ϵͳ�о��ܶ�λװ�õ�����[J]. �Ϻ���ͨ��ѧѧ��, 2000, 34(11): 1483-1485.
CAO Chang-jiang, ZHANG Chen, LI Zheng-bo, et al. Design of precise position instrument for micro-assemble system[J]. Journal of Shanghai Jiaotong University, 2000, 34(11): 1483- 1485.
[4] ��Դ��, �ý���, ������, ��. �Ƚ����������е���Ҫ��ѧ����[J]. �й���ѧ����, 2002, 16(4): 204-209.
LEI Yuan-zhong, LUO Jian-bin, DING Han, et al. Important academic problems in advanced electronic manufacturing[J]. Bulletin of National Natural Science Foundation of China, 2002, 16(4): 204-209.
[5] Naren V. Application of microcomputer in submicron level measurements and control of a positioning device[J]. Journal of Microcomputer Applications, 1995, 18(2): 149-164.
[6] Kang S Y, Williams P M, McLaren T S, et al. Studies of thermosonic bonding for flip-chip assembly[J]. Materials Chemistry and Physics, 1995, 42(1): 31-37.
[7] Kim G, Gon Y. Thermocompression bonding effects on bump-pad adhesion[J]. Microelectronics and Reliability, 1996, 36(4): 550-550.
[8] Kang S Y, Williams P M, Lee Y C. Modeling and experiment studies on thermo-sonic flip chip bonding[J]. Packaging and Manufacturing Technology, 1995, 18(4): 728-733.
[9] Luk C F, Chan Y C, Hung K C. Development of gold to gold interconnection flip chip bonding for chip on suspension assemblies[J]. Microelectronics Reliability, 2002, 42(3): 381- 389.
[10] Mickelson A R, Basavanhall Y N R, Lee Y C. Optoelectronic packaging[M]. New York: Wiley & Sons Inc, 1997.
[11] Tomioka T, Iguchi T, Mori I, et al. Thermosonic flip chip bonding for low cost packaging[C]//Proceedings of SPIE. Denver: The International Society for Optical Engineering, 2002: 360-365.
[12] Hotchkiss G, Gonzalo A, Darvin E, et al. Wafer level packaging of a tape flip-chip chip scale packages[J]. Microelectronics Reliability, 2001, 41(5): 705-713.
[13] Pascariu G, Cronin P, Crowley D. Next-generation electronics packaging using flip chip technology[J]. Advanced Packaging, 2003, 12(11): 21-26.
[14] Kang S Y, Mclaren T, Wenge Z, et al. Thermosonic bonding for flip-chip assembly[C]//Proceedings of 1995 IEEE Multi-chip Module Conference. LosAlamitos: IEEE Comput Soc Press, 1995: 75-80.
[15] ֣����. ������Ӿ���ģʽʶ��[M]. ������������ҵ������, 1998.
ZHENG Nan-ning. Computer vision and pattern recognition[M]. Beijing: National Defence Industry Press, 1998.
[16] Adept Technology Canada Co. HexSight basics user guide reference 3.3[M]. Canada: Adept Technology Canada Co., 2004.
[17] Snyder W E, QI Hai-rong. Machine vision [M]. England: Cambridge University Press, 2004.
[18] ������, ������. �����Ӿ��е���������귽������[J]. �����Ӧ���о�, 2004, 21(4): 4-6
WU Wen-qi, SUN Zeng-qi. Overview of camera calibration methods for machine vision[J]. Application Research of Computers, 2004, 21(4): 4-6.
[19] �ܵ¼�, ����. ������װ���ռ���[M]. ������������ҵ������, 2002.
ZHOU De-jian, WU Zhao-hua. Surface mounted technology[M]. Beijing: National Defence Industry Press, 2002.
�ո����ڣ�2006-07-28
������Ŀ��������Ȼ��ѧ����������Ŀ(50390064)�����ҡ�973���ƻ���Ŀ(2003CB716202)�����ҽ�������ѧ�ع���Ա����������Ŀ(76084)
����飺�ƽ(1952-)���У����ϳ�ɳ�ˣ����ڣ��������ӷ�װ���ռ��豸�о�
ͨѶ���ߣ��ƽ���У����ڣ��绰��0731-8830293(O)��E-mail: rikempeil02@hotmail.com
[1] ��۽��. ���ӷ�װ��оƬ���Ӽ��������豸�ķ�չ[J]. ���ӹ�ҵר���豸, 2000, 29(4): 5-10.
[2] Rao R, Eugene J T, Alan G R. ���ӷ�װ�ֲ�[M]. �й�����ѧ����ӷ�װרҵίԱ����. ����: ���ӹ�ҵ������, 2001.
[3] �ܳ���, �š��, ����, ��. װ��ϵͳ�о��ܶ�λװ�õ�����[J]. �Ϻ���ͨ��ѧѧ��, 2000, 34(11): 1483-1485.
[4] ��Դ��, �ý���, ������, ��. �Ƚ����������е���Ҫ��ѧ����[J]. �й���ѧ����, 2002, 16(4): 204-209.
[15] ֣����. ������Ӿ���ģʽʶ��[M]. ������������ҵ������, 1998.
[17] Snyder W E, QI Hai-rong. Machine vision [M]. England: Cambridge University Press, 2004.
[18] ������, ������. �����Ӿ��е���������귽������[J]. �����Ӧ���о�, 2004, 21(4): 4-6
[19] �ܵ¼�, ����. ������װ���ռ���[M]. ������������ҵ������, 2002.
