
DOI: 10.11817/j.issn.1672-7207.2015.03.010
����Դ��������ʽ��Һ�����ƶ�ϵͳ
����1, 2�������1, 2������1, 2
(1. ͬ�ô�ѧ ����Դ�����������ģ��Ϻ���201804��
2. ͬ�ô�ѧ ����ѧԺ���Ϻ���201804)
ժ Ҫ��
̤��о�ģ�⡢Һѹ������ʧЧ�ƶ����ݹ��ܵ�һ��ʽ�ƶ����ף������˿����ƶ�̤�����ָ�ѹ������ĵ�Һ�����ƶ�ϵͳ������ECE R13����͵綯���������������Լ��������Ч��������Ϊ�Ż�Ŀ�꣬�ƶ�����ʽ��Һ�����ƶ�ϵͳ���ƶ���������Ʋ��ԡ�����MATLAB/Simulink-AMESim��������ʽϵͳ�����Ϸ���ģ�ͣ����Ӳ���ڻ�����̨�����飬������Һѹ�������ܼ��ƶ�������Ʋ��ԡ��������������ʽ��Һ�����ƶ�ϵͳʵ���ָ�ѹ���ľ�ȷ���ƣ�����Ч�ػ����ƶ���������NEDCѭ�������£����ƶ���������Ч�ʿɴ�54.8%��
�ؼ��ʣ�
����Դ����������ʽϵͳ����Һ�����ƶ�ϵͳ��ѹ������������Ч����
��ͼ����ţ�U463.5 ���ױ�־�룺A ���±�ţ�1672-7207(2015)03-0835-08
Decoupled electro-hydraulic brake system for new energy vehicles
LIU Yang1, 2, SUN Zechang1, 2, WANG Meng1, 2
(1. Clean Energy Automotive Engineering Center, Tongji University, Shanghai 201804, China;
2. School of Automotive studies, Tongji University, Shanghai 201804, China)
Abstract: A master cylinder integrated with brake pedal feel simulator, hydraulic brake booster and failure backup was designed, and an electro-hydraulic brake system using the cylinder was developed, whose brake pedal force and wheel cylinder pressure were decoupled. Considering ECE R13 regulations and electric motors, battery pack characteristic constraints, braking force distribution control strategy was developed to achieve the optimized regenerative power. A co-simulation model in MATLAB/Simulink-AMESim was established and a hardware-in-the-loop test beach was used to verify the hydraulic pressure control performance and the braking force distribution strategy. The results show that the decoupled system can achieve precise control of the wheel cylinder pressure and the efficient braking energy regeneration, which reaches 54.8% under the NEDC driving cycle.
Key words: New energy vehicles; decoupled system; electro-hydraulic brake system; pressure control; regenerative energy efficiency
���е�·�����£������ƶ��������ƶ������ɴ�����������1/3~2/3[1]������Դ������Һ�����ƶ�ϵͳ�ܹ����ղ����ƶ���������Ч��߳������о����ԡ�����Դ�����ƶ�����������Ҫ�ܵ��ƶ�ϵͳ�ṹ�������ƶ�����Һѹ�ƶ���Э�����Ʋ��Ե�Ӱ�졣���ƶ�̤����ƶ��ָ�ѹ���Ƿ�������Һ�����ƶ�ϵͳ��Ϊ�ǽ���ʽ�ͽ���ʽ2�࣬ǰ�߶�Ӧ�������ͻ�϶����綯�����͵��ٵ綯����������������ȫ������Դ�����ƶ�ϵͳ�������[2]�ڲ��ı䳵����ͳҺѹ�ƶ�ϵͳǰ��������˷ǽ���ʽ��Һ�����ƶ�ϵͳ��Park��[3]���ڴ�ͳ�����ȶ��Կ���ϵͳ��Һѹ���Ƶ�Ԫ��ͨ�����ӵ�ŷ���̤��о�ģ�����Ȳ���ʵ�ֲ�ͬ�ƶ�ģʽ�л��������˽���ʽ��Һ�����ƶ�ϵͳ��Yasushi��[4-5]ͨ�����촫ͳ�ƶ�����ȫ��������ף�ʹ��߱�ѹ���������ƹ��ܣ����ݴ˿����˽���ʽ��Һ�����ƶ�ϵͳ��������Ը����ƶ�ϵͳ�ƶ���������Ʋ��Խ������о�����־ǿ��[6-9]�ֱ�������������������ģʽ�л�������꼰�ƶ����������ߵ�б�ʣ���繦�ʺͳ��ϵͳ���Ч��Ϊ�Ż�Ŀ�꣬�Ը����ƶ�ϵͳ�ƶ���������Խ������о���¬�����[10]�о��˲�ͬ���ƶ���������Բ��Ա��������������Ч��Ӱ�졣��Ը����ƶ�ϵͳ�ṹ�����Ʋ����о�������������ƿ�����һ��ʽ�ƶ���������ʽ��Һ�����ƶ�ϵͳ�����������Ч�����������ŵ������ƶ�����Һѹ�ƶ���������ԡ�ͨ��MATLAB/ Simulink-AMESim���Ϸ���ģ�ͺ�Ӳ���ڻ��������飬�Խ���ʽ��Һ�����ƶ�ϵͳѹ���������ܼ��ƶ���������Խ�������֤�����Աȷ����˲�ͬ�����ƶ��������������
1 ����ʽ��Һ�����ƶ�ϵͳ
��ǽ���ʽϵͳ��ȣ�����ʽ�����ƶ�ϵͳʵ�����߿��ƶ��������������ƶ���Э�����ƣ�����Ч�ʸߣ�̤��о����ã�Ϊ�ˣ�����˻���һ��ʽ�ƶ����Ľ���ʽ�����ƶ�ϵͳ��
1.1 ϵͳ�ṹ
��ϵͳ��Һѹ�ƶ��������ƶ�2����ϵͳ��ɣ�ϵͳ�ṹ��ͼ1��ʾ��Һѹ�ƶ���ϵͳ����ȫ����Ƶ�һ��ʽ�ƶ�����ʵ�����ƶ�̤����ָ�ѹ���Ľ��ͬʱ�ܹ��������Ƹ��ָ�ѹ����
������������Һѹ���ڵ�Ԫ�ֱ�ʵʱ�ɼ������ƶ���Һѹ�ƶ���ϵͳ��Ϣ���������������ƶ����Ƶ�Ԫ�������ƶ����Ƶ�Ԫ�ɼ��ƶ�̤����Ϣ�Խ���˾���ƶ������ݳ�������״̬��·�湤�����䳵��ǰ�������ƶ������硢Һ�ƶ��������ֱ���Һѹ���ڵ�Ԫ�����������������ָ�Һѹ�������ƶ�������ָ�����������֮����Ϣ�����Ϳ���ָ����ͨ��CAN(controller area network)����ʵ�֡�
1.2 һ��ʽ�ƶ������ܳ�
һ��ʽ�ƶ������Ǹý���ʽ�����ƶ�ϵͳ��ƵĹؼ������ѹ��������Һѹ�õ����һ��ʽ�ƶ������ܳɣ���ṹ��ͼ2��ʾ��ϵͳ�ϵ�����ƶ����Ƶ�Ԫ����Һѹ�����������źţ�����Һѹ��ά�ָ�ѹ������ѹ���ȶ���������Ϊ�ƶ�����ǰ����ǻ�ṩ��ѹ�ƶ�Һ��
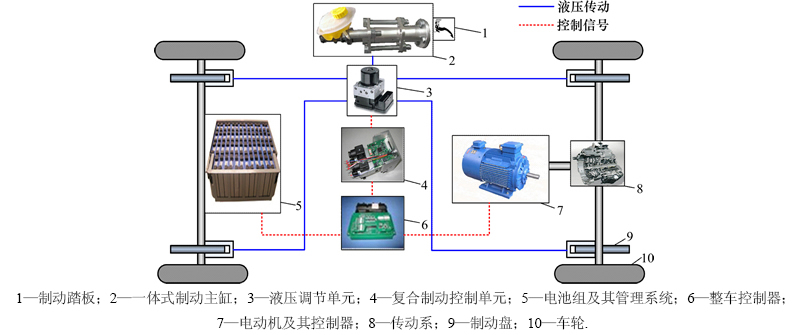
ͼ1 ����ʽ��Һ�����ƶ�ϵͳ�ṹʾ��ͼ
Fig. 1 Structure of electro-hydraulic brake system
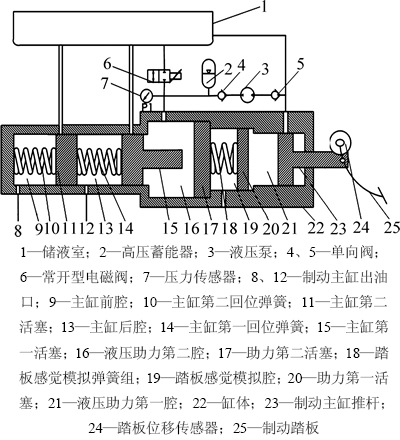
ͼ2 һ��ʽ�ƶ������ܳ�ʾ��ͼ
Fig. 2 Diagram of integrated master cylinder
�������ƶ�̤�壬Һѹ�����ڶ�ǻ�ڸ�ѹ�ƶ�Һʹ�����ڶ��������־�ֹ��̤��о�ģ�ⵯ����ͨ��Һѹ������һǻ���ƶ�̤���ṩ����������ģ�ͳ�ƶ�̤���ƶ��о���ͼ2��ʾΪ�����ƶ�̤��ʱ������λ�á��������ƶ�̤�����Ҫ�ָ�ѹ����������ʱ��Һѹ���ڵ�Ԫ������ָ��Ը��ָ��ƶ�ѹ�����ж������ơ�
�����ֵ�������ʱ������������ά�ָ�ѹ�������ƶ�̤��ʱ��̤������������������������̤��о�ģ�ⵯ���������һ�������ƶ�Һ��2���������ƶ��������ƶ��ָף�ʵ��������ʧЧ�����ƶ���ͬʱ������������һǻ�Ŵ���̤����������ΪʧЧ״̬�½����ƶ��ṩ��Һѹ����������˳����ƶ���ȫ��
2 �ƶ���������Ʋ���
��Һ�����ƶ�ϵͳ�ƶ������У�Ϊ��֤�ƶ��ȶ��ԣ��������ܻ����ƶ����������������ǰ�������ƶ����Լ�Һѹ�ƶ����������ƶ������ݲ�����ABS�ȳ����ȶ��Կ��ƹ��ܡ�
2.1 ECE R13����Լ��
���ͼ1���Գ���ǰ�Ἧ��ʽ�綯������Ϊ������ǰ�������ƶ����������������������������з�������˾���ƶ�ǿ������Ϊzʱ����

ʽ�У�Fbf Ϊǰ�����ƶ�����FbrΪ����Һѹ�ƶ�����Fbf_motΪ�綯�������ƶ�����Fbf_hydΪǰ��Һѹ�ƶ�����GΪ������������
ǰ�������ƶ�����I���ߡ�ECE R13�ߺ�·�渽��ϵ�� ʱf������[11]����ͼ3��ʾ���綯�������ƶ�������ǰ���ƶ������䷶Χ��ȡֵ���������ƶ������ȡֵ���£�
ʱf������[11]����ͼ3��ʾ���綯�������ƶ�������ǰ���ƶ������䷶Χ��ȡֵ���������ƶ������ȡֵ���£�

ʽ�У�zB ��zC��zD�ֱ�ΪB��C��D��ʱ�ƶ�ǿ������hgΪ���ĸߣ�LΪ��ࣻbΪ���ĵ����������߾��롣
2.2 �綯���͵����������Լ��
�ƶ�����������������ƶ������ܵ��綯���͵��������״̬Ӱ��[12]���綯�������ƶ�ת����ת�١��¶��йأ�������繦���ܵ����ɵ�״̬SOC���¶ȵ�Ӱ�죬���綯�������ƶ�������������������

ʽ�У�Pneg Ϊ��Ч�������ʣ�PbatΪ������繦�ʣ�PmotΪ�綯���������ʣ���motΪ�綯������Ч�ʣ���batΪ�������Ч�ʣ���mΪ����ϵ��еЧ�ʣ�vΪ���١�
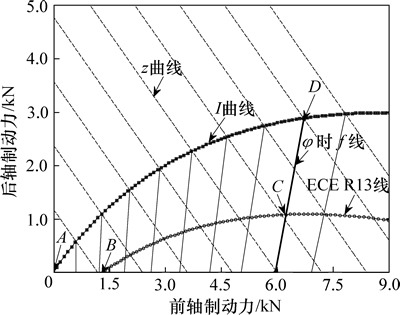
ͼ3 ǰ�����ƶ�������Լ��
Fig. 3 Diagram of brake force distribution constraints
2.3 ��Ч�����������ŵĿ��Ʋ���
Ӱ���Һ�����ƶ�ϵͳ�������������أ���綯�������ƶ�ת�ء�ת�ټ������SOC���¶ȵ�������֮���Ӱ�졣���磬���ض��綯��ת�ٺ͵����SOC�£���ͬ�������ƶ�ת�ػ������Ӧ�ij������������ƶ�ת�ؽ�Сʱ���綯�����ŵ�����ռ������Խϴ��µ綯������Ч�ʽϵͣ��������ƶ�ת�ؽϴ�ʱ����������������ʹ�����ܺ����ӣ����³��Ч�ʽ��ͣ��ⶼ����ϵͳ������������Ӱ�졣��ˣ��ض������´���ʹ����Ч�����������ŵĹ����㣬ʹ�ó������������ƶ�������
ͼ4��ʾΪ�ƶ�����������ͼ������Ч��������PnegΪ�Ż�Ŀ�꣬����ͼ4���ƶ�����Ч�����������ŵĿ��Ʋ��ԡ�
kʱ�̣�ͨ�������ƶ�̤���г�sk�õ�˾���ƶ�ǿ������zk�������õ��ƶ�������Gzk��
������ECE R13���������£�����ǰ�������ƶ����ֱ�ΪFbf,k ��Fbr,k��
���ݵ綯���͵����״̬ȷ���綯���������ƶ�ת�أ����ǰ���ƶ���Fbf,k��ȷ�������ƶ�ת�ط�Χ[Tmot,mink, Tmot,maxk]��Tmot,mink��Tmot,maxk�ֱ�kʱ�������ƶ�ת���ϡ�����ֵ��
�Բ���Tmot,ki�������ƶ�ת�ؽ�����ɢ���õ�Tmot,kj=Tmot,mink+jTmot,ki��j=0, 1, ��, n ��n=(Tmot,maxk- Tmot,mink)/Tmot,ki����ϵ�ǰת��nmot,k���¶�tmot,k�õ��綯������Ч�ʦ�mot,kj��ͬʱ������õ�����������Ibat,kj����ϵ����SOCk���¶�tbat,k�õ���س��Ч�ʦ�bat,kj��
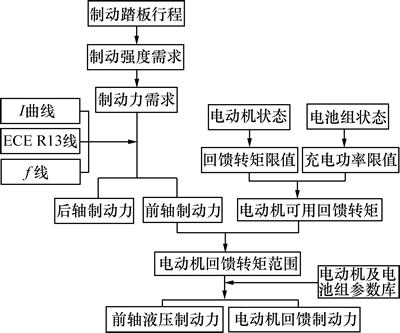
ͼ4 �ƶ�����������ͼ
Fig. 4 Diagram of braking force distribution
��ʽ����õ�kʱ����Ч��������Pneg,kj���У���Ѱ�������Ч��������max{Pneg,kj}ʱ�綯�������ƶ�ת��Tmot,k������ȷ��ǰ��Һѹ�ƶ���Fbf_hyd,k��
�ظ��������裬����k+1ʱ�������ƶ�ת�� Tmot,k+1��ǰ��Һѹ�ƶ���Fbf_hyd,k+1�ͺ����ƶ���Fbr,k+1��
������һά�����Ż��㷨Ѱ�������Ч��������max{Pneg,kj} [12]�����������Ч�ʺ�Ŀ�������ƶ�ת�ؾ��ȡ�
3 ���Ϸ���ģ�ʹ
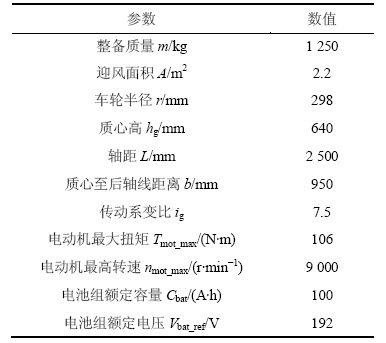
Ϊ��������ƵĽ���ʽ��Һ�����ƶ�ϵͳ���ܺ��ܺ����ԣ�����ij�ʹ��綯����ʵ�ʲ���������MATLAB/Simulink-AMESim���������Ϸ���ģ�ͣ��ó�����������1��ʾ��
�����Ϸ���ģ����Һѹ�ƶ���ϵͳģ�͡������ƶ���ϵͳģ�͡������ƶ����Ƶ�Ԫģ�ͺͳ��������Ի�����ģ����ɣ���ͼ5��ʾ�����У�����MATLAB/ Simulink����Ч�����������ŵĿ��Ʋ��Խ����˸����ƶ����Ƶ�Ԫģ�ͣ��������������ϵͳģ���йؼ��������м�Ҫ˵����
��1 ij�ʹ��綯������������
Table 1 Electric vehicle parameters
3.1 Һѹ�ƶ���ϵͳģ��
Һѹ�ƶ���ϵͳģ����һ��ʽ�ƶ������ܳ�ģ�͡�Һѹ���ڵ�Ԫģ�ͺ��ƶ��ָ�ģ�͵���ɣ���ͼ6��ʾ��ͼ�н�������ǰ�ָ��������·�����У�Һѹ���ڵ�Ԫ���ô�ͳABS�����Ϊ���㽨ģ�������Ϊִ�����Ϳ������ֱ���н�ģ��
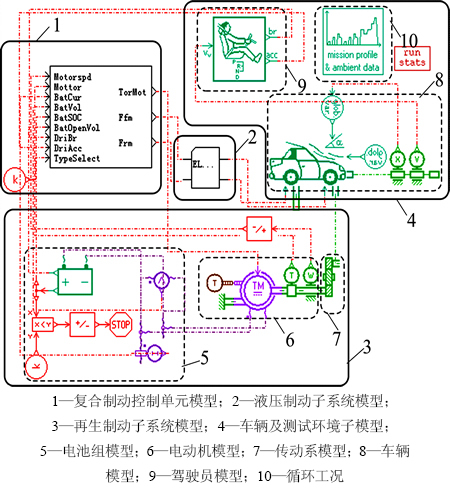
ͼ5 MATLAB/Simulink-AMEsim���Ϸ���ģ��ͼ
Fig. 5 Co-simulation model of electro-hydraulic brake system
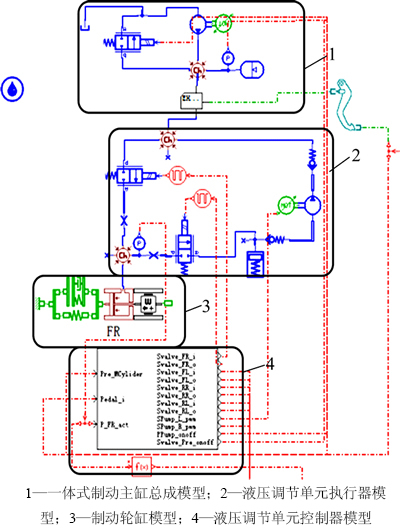
ͼ6 Һѹ�ƶ���ϵͳģ��ͼ
Fig. 6 Hydraulic brake subsystem model
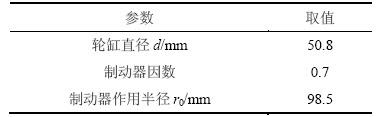
��ͼ2��ʾ����ƽṹ��ʵ�ʲ���������һ��ʽ�ƶ������ܳ�ģ�ͣ�Һѹ���ڵ�Ԫִ����ģ�ͷֱ����һ�Խ������ͷ��Ը����ƶ��ָ��ж�������[13]����ǰ�����ֱָ�װ��ѹ����������Һѹ���ڵ�Ԫ������ģ������MATLAB/Simulink��������װΪS-function��ͨ��SimuCosim�ӿ���AMEsim�������Ϸ��棬���÷ֶ�ʽPID���Ʋ���ʵ�ָ��ָ�ѹ����ȷ����[14]����ʽ�ƶ����ָ�Ϊ��������ģ�ͣ��ƶ��������������2��ʾ��
��2 ��ʽ�ƶ�����������
Table 2 Brake disc parameters
3.2 �����ƶ���ϵͳģ��
�綯������������������������ȹ���ϵͳ���ҵ綯������ʱ��϶̣������¶�Ӱ���Խ��ͽ�ģ�Ѷȡ��������õ�ѹԴ-��Ч����ģ����ģ������ij�ŵ���̣��綯������ƽ��ֵģ�ͽ�ģ������������������ת��������������Ч�ʦ�bat�͵綯������Ч�ʦ�mot�ɷֱ�ͨ�������������͵綯��̨������õ�[15]��
3.3 ���������Ի�����ģ��
��ģ�Ͱ�������ģ�͡���ʻԱģ�ͺ�ѭ������ģ��[16]�����У�����ģ��Ϊ���������ƶ�������ʻ������������ѧƽ�ⷽ�̣���ʻԱģ������ģ���ʻԱ��������̤����ƶ�̤�壬������Ϊ�������г��ٲ�����PID�㷨ʵ��Ŀ�공�ٵĸ��棬����������ƶ�ָ�����[0, 1]��ȡֵ��
4 �������
4.1 ����ʽϵͳѹ��������֤
���ɿص��ָ�ѹ��������ʵ�ָ����ƶ��Ļ�����Ϊ���˽���ʽ��Һ�����ƶ�ϵͳҺѹ�ƶ���ϵͳ�ṹ�ĺ����Լ�����Ʋ�����Ч�ԣ���չ��ģ�ͷ����̨������2������֤������
4.1.1 ģ�ͷ�����֤
ѡȡ��ԭ�ͳ���·������ijһ�ƶ�Ƭ�ζ�ģ�ͽ����˷�����֤�����Թ��̰������С��Ͳ�ͬ�ƶ�ǿ�ȣ���ʩ��Һѹ�ƶ������ƶ�������ϵ��ԼΪ0.69���ƶ���ʼ����Լ88 km/h�����ټ��ƶ����ٶȱ仯��ͼ7��ʾ��
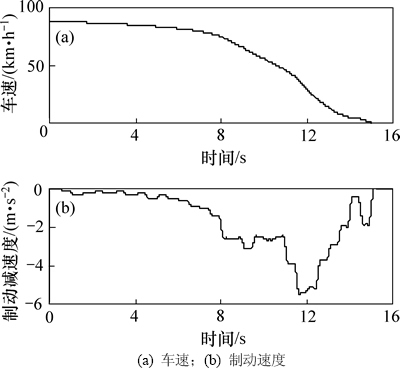
ͼ7 ���ټ��ƶ����ٶȱ仯����
Fig. 7 Curves of vehicle velocity and braking deceleration
���ƶ�������ǰ�������ƶ��ָ�ʵ��ѹ����ΪĿ��ֵ����������Һѹ�ƶ���ϵͳģ�ͣ�ʵʱ����ѹ�����ָ�״̬��ͼ8��ʾ�����У��ָ�״̬���ߵ�1������ѹ��0������ѹ��-1������ѹ����ͼ8��֪��Һѹ�ƶ���ϵͳģ���������Ϻõظ�����Ŀ��ѹ���ı仯��
4.1.2 ����̨����֤
������(Hardware-in-the-loop, HIL)����̨����ͼ9��ʾ������xPC Target������-Ŀ����ṹ��Ӳ���ڲ���̨���϶�Һѹ�ƶ���ϵͳѹ���������ܽ����˽�һ����֤������̨�ܲ�������ԭ�ͳ���ͬ��Һѹ�ƶ�ϵͳ���������Һѹ���ڵ�Ԫ���ƶ��ָ��ƶ���·�ȡ�ʵ������ͼ10��ʾ���ɼ����ָ�ʵ��ѹ����Ŀ��ѹ���������Ǻϣ��ﵽ��Ԥ��Ч����
��������Һѹ�ƶ���ϵͳ�ṹ�Ϳ��Ʋ��������˸����ƶ�ϵͳҺѹ��������Ϊ��֤����ģ�;��Ⱥ����ƶ�ϵͳװ��Ӧ���ṩ��������
4.2 �ƶ�������������
���ƶ�������ʵ�ʻ��������������Ereg_bat�븴���ƶ�ϵͳ�������ƶ�����Eneg֮�ȣ�����������Ч�ʦ�reg��Ϊ�ƶ����̻�������������ָ�꣺


ʽ�У�tΪ��λ�������ڡ�
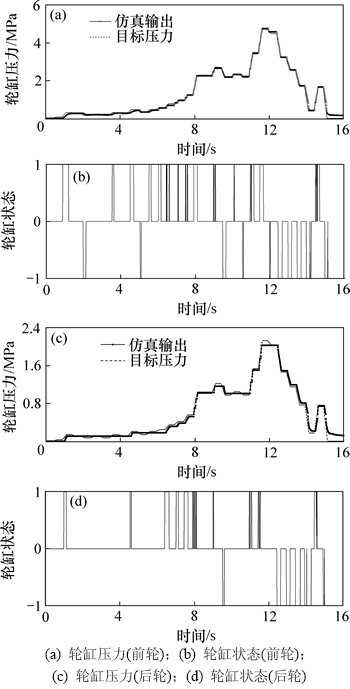
ͼ8 �ָ�ѹ�����ָ�״̬�仯
Fig. 8 Wheel cylinder pressure and control modes
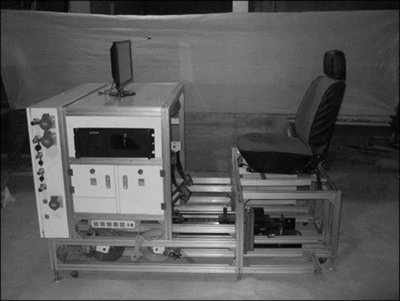
ͼ9 Ӳ���ڻ��������̨��ʵ��ͼ
Fig. 9 Picture of HIL test beach
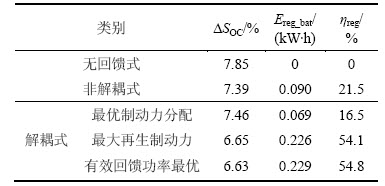
ѡ����NEDCѭ���������в��ԣ�������ʼSOCΪ0.8������ѭ����������ʱ���ƶ������е�Һ�����ƶ�ϵͳ��������Eneg�����ɻ���������ƶ�����Ϊ0.418 kW��h��Ϊ���˽���ʽ��ǽ���ʽϵͳ�ṹ���켰����ʽϵͳ��ͬ���Ʋ��ԶԻ�������Ӱ�죬ѡȡ�˷ǽ���ʽϵͳ��ֱ���������ƶ���������ԡ���������ƶ����������[1]����Ч�����������Ų��ԵĽ���ʽϵͳ��Ϊ�Աȣ����Խ�����3��ʾ���ɱ�3��֪������ʽϵͳ��������ƶ�������Ч�����������ŷ����ȷǽ���ʽ������������Ч�ʦ�reg�ֱ������32.6%��33.3%�����������ƶ�������ȣ������SOC�仯����SOC�������ͣ�����ʽϵͳǰ���£����ò�ͬ���Ʋ��ԶԻ�������Ӱ��ϴ���Ч����Ч�����Ŵ�54.8%���Ը�����������ƶ�����������������NEDCѭ����������ƶ�ǿ�Ƚ�Ϊ0.12�����ƶ�����ʱ�����������ŵĿ��Ʋ��Ի�������Ч����ߣ��ɴ��������С������鴦�ڽϸߵij��Ч�ʣ������˽�һ���Ż��ռ䣻��I����ΪĿ�꣬����ǰ�������ƶ�������������ƶ����������������ǰ���ƶ������䣬�������������ƶ�����ʩ�ӣ��������ƶ���������Ч��Զ������Ч�����������ź���������ƶ����Ŀ��Ʋ��ԣ�Ҳ�ȷǽ���ʽ�����Ļ�������Ч�ʵ�5.0%��
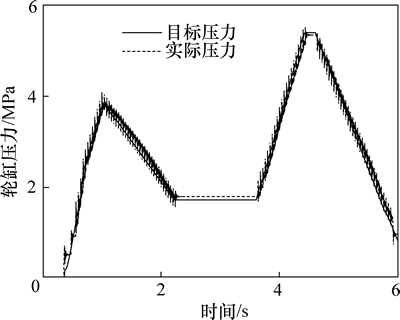
ͼ10 �ָ�ʵ��ѹ����Ŀ��ѹ���仯
Fig.10 Curves of wheel cylinder actual pressure and target pressure
��3 ��ͬ��Һ�����ƶ������Ա�
Table 3 Comparisons of brake systems under NEDC
����ʽ�ͷǽ���ʽϵͳ�ṹ�Ի��������нϴ�Ӱ�죬�������ý���ʽϵͳʱ����������Ч���ڲ��ò�ͬ���ƶ����������ʱҲ���ڽϴ���졣�ָ�ѹ�����ƽ����NEDCѭ���������Ա�����������Ľ���ʽ��Һ�����ƶ�ϵͳ���ƶ���������Ʋ����������ƶ���Э���������Ч�������յ�����
5 ����
1) ��ƿ���һ��ʽ�ƶ���������ʽ��Һ�����ƶ�ϵͳ��ʵ���������ƶ������ָ�Һѹ�ƶ����������ƣ�Ϊ�ƶ���Э�����Ʋ����о��ṩ��֧�֡�
2) ��������ʽ��Һ�����ƶ�ϵͳMATLAB/ Simulink-AMESim���Ϸ���ģ�ͣ���������ģ�ͷ����HIL������֤���������������Ƶ�Һѹ�ƶ���ϵͳ�ܹ�ʵ�ָ��ָ�Һѹ���ľ�ȷ���ơ�
3) ����ECE R13����Ͷ���ϵͳԼ�����ƶ�����Ч�����������ŵĸ����ƶ�ϵͳ���Ʋ��ԣ�������������ƶ���������Ч�ʣ���NEDCѭ�������£�����������Ч�ʦ�reg�ɴ�54.8%��
�ο����ף�
[1] Ehsani M, Gao Y M, Emadi A. Modern electric, hybrid electric, and fuel cell vehicles fundamental, theory, and design[M]. Boca Raton: CRC Press, 2010: 346-360.
[2] ����, ����, �콨��. �綯����������������������[J]. ��������, 2005, 27(1): 24-27.
ZHANG Yi, YANG Lin, ZHU Jianxin. The control strategy of energy regeneration for electric vehicle[J]. Automotive Engineering, 2005, 27(1): 24-27.
[3] Park M, Kim S, Yang L, et al. Development of the control logic of electronically controlled hydraulic brake system for hybrid vehicle[J]. SAE Paper, 2009-01-1215.
[4] Aoki Y, Suzuki K, Nakano H, et al. Development of hydraulic servo brake system for cooperative control with regenerative brake[J]. SAE Paper, 2007-01-0868.
[5] Ohtani Y, Innami T, Obata T, et al. Development of an electrically-driven intelligent brake unit[J]. SAE Paper, 2011-01-0572.
[6] ��־ǿ, ��ѧѸ. ���綯������Һ���������ƶ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(9): 2687-2691.
LIU Zhiqiang, GUO Xuexun. Electronic-hydraulic-compound regenerative braking control for electric vehicles[J] Journal of Central South University (Science and Technology), 2011, 42(9): 2687-2691.
[7] ����, �ὣ��, �����. �綯��������ƶ�ϵͳ���Ʋ��ԵĸĽ�[J]. ���մ�ѧѧ��(��Ȼ��ѧ��), 2013, 34(2): 125-130.
HE Ren,YU Jianbo, WANG Runcai. Improvement of control strategy in hybrid brake system of electric vehicle[J]. Journal of Jiangsu University (Science and Technology), 2013, 34(2): 125-130.
[8] ���Ǿ�, �Ժ�, ��ï��. �綯��������������������ƶ����Ʋ��Ե��о�[J]. ��������, 2013, 35(2): 105-110.
YANG Yajuan, ZHAO Han, ZHU Maofei. A study on the control strategy for maximum energy recovery by regenerative braking in electric vehicles[J]. Automotive Engineering, 2013, 35(2): 105-110.
[9] ���, л�ϱ�, �ν���. ��϶����ͳ�����ʽ�����ƶ������Ż�������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(1): 122-128.
ZHU Hao, XIE Yubing, HE Jianhui. Hybrid electric bus regenerative braking parallel control strategy optimization and simulation[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 122-128.
[10] ¬����, ŷ������, �Ⱦ�, ��. �綯��������ͬ���綯�������ƶ�������������[J]. �й��綯������ѧ��, 2013, 33(3): 83-91.
LU Dongbin, OUYANG Minggao, GU Jing, et al. Optimal regenerative braking control for permanent magnet synchronous motors in Electric Vehicles[J]. Proceedings of the CSEE, 2013, 33(3): 83-91.
[11] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 89-128.
YU Zhisheng. Automobile theory[M]. 5th ed. Beijing: China Machine Press, 2009: 89-128.
[12] ������, ½��. ���Ż����������ſ���[M]. ������: ���������̴�ѧ������, 2006: 119-141.
WANG Xiaoling, LU Jun. Optimization method and optimal control[M]. Harbin: Harbin Institute of Technology Press, 2006: 119-141.
[13] ֣����, �ڳ���, �����, ��. �����߿�Һѹ�ƶ�ϵͳ���ȶ��Է���[J]. ũҵ��еѧ��, 2008, 39(2): 180-184.
ZHENG Hongyu, ZONG Changfu, ZHU Tianjun, et al. Stability analysis of automotive electro-hydraulic brake system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(2): 180-184.
[14] Zhang J, L�� C, Gou J, et al. Cooperative control of regenerative braking and hydraulic braking of an electrified passenger car[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(10): 1289-302.
[15] ������, ����, �ܺ�, ��. ���綯������������Ч�����Բ��Է���[J]. ��е����ѧ��, 2012, 48(12): 88-95.
HUANG Wanyou, CHENG Yong, CAO Hong, et al. Test and analysis of electric vehicle��s energy feedback efficiency[J]. Journal of Mechanical Engineering, 2012, 48(12): 88-95.
[16] ��ʢ��. �ֲ�ʽ�����綯����ϵͳ��ģ���ܺ������о�[D]. �Ϻ�: ͬ�ô�ѧ�е�ѧԺ, 2012: 18-24.
LI Shengxin. The research of the energy consumption based on the modeling of the distributed driven electric vehicle[D]. Shanghai: Tongji University. Sino-German School, 2012: 18-24.
(�༭ �°���)
�ո����ڣ�2014-05-20�������ڣ�2014-07-19
������Ŀ(Foundation item)�������ص�����о���չ�ƻ�(973�ƻ�)��Ŀ(2011CB711202) (Project(2011CB711202) supported by the National Basic Research Development Program (973 Program) of China)
ͨ�����ߣ������ʿ�о�������������Դ���������ƶ�ϵͳ�о���E-mail: 021lytj@tongji.edu.cn
ժҪ����Ƽ������ƶ�̤��о�ģ�⡢Һѹ������ʧЧ�ƶ����ݹ��ܵ�һ��ʽ�ƶ����ף������˿����ƶ�̤�����ָ�ѹ������ĵ�Һ�����ƶ�ϵͳ������ECE R13����͵綯���������������Լ��������Ч��������Ϊ�Ż�Ŀ�꣬�ƶ�����ʽ��Һ�����ƶ�ϵͳ���ƶ���������Ʋ��ԡ�����MATLAB/Simulink-AMESim��������ʽϵͳ�����Ϸ���ģ�ͣ����Ӳ���ڻ�����̨�����飬������Һѹ�������ܼ��ƶ�������Ʋ��ԡ��������������ʽ��Һ�����ƶ�ϵͳʵ���ָ�ѹ���ľ�ȷ���ƣ�����Ч�ػ����ƶ���������NEDCѭ�������£����ƶ���������Ч�ʿɴ�54.8%��
[2] ����, ����, �콨��. �綯����������������������[J]. ��������, 2005, 27(1): 24-27.
[6] ��־ǿ, ��ѧѸ. ���綯������Һ���������ƶ�����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(9): 2687-2691.
[7] ����, �ὣ��, �����. �綯��������ƶ�ϵͳ���Ʋ��ԵĸĽ�[J]. ���մ�ѧѧ��(��Ȼ��ѧ��), 2013, 34(2): 125-130.
[8] ���Ǿ�, �Ժ�, ��ï��. �綯��������������������ƶ����Ʋ��Ե��о�[J]. ��������, 2013, 35(2): 105-110.
[11] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 89-128.
[12] ������, ½��. ���Ż����������ſ���[M]. ������: ���������̴�ѧ������, 2006: 119-141.
[13] ֣����, �ڳ���, �����, ��. �����߿�Һѹ�ƶ�ϵͳ���ȶ��Է���[J]. ũҵ��еѧ��, 2008, 39(2): 180-184.
[15] ������, ����, �ܺ�, ��. ���綯������������Ч�����Բ��Է���[J]. ��е����ѧ��, 2012, 48(12): 88-95.
[16] ��ʢ��. �ֲ�ʽ�����綯����ϵͳ��ģ���ܺ������о�[D]. �Ϻ�: ͬ�ô�ѧ�е�ѧԺ, 2012: 18-24.
