
���ڻ���Զ���ģ�ͺ�ģ�����Ķ������������滮
��С÷1��������1, 2������1
(1. ���ִ�ѧ ͨ�Ź���ѧԺ������ ������130025��
2. ���ִ�ѧ ���̷����������ص����ʵ���ң����� ������130025)
ժ Ҫ��
ģ�����۶Զ�̬�����еĶ�������ϵͳ�������ƽ��н�ģ���ֱ���ٶȵ�����·���������ٶ�·���������ϵĹ��̽��н�ģ��������ȷ������������������ģʽ״̬�����л���ϵ�������1�ֻ���ģ�������Ƶ�ʮ��·�ڶ�����滮�������������о�·�ߵĽǶȡ�����֮��ľ����Լ�����Ԥ�����ʱ�����Ϊ���������룬С�����ٶȺ�·�������Ƕ���Ϊ�����ʵ����������ȫ��Ч�����С�ʵ������֤�˿����㷨����Ч�ԡ�
�ؼ��ʣ�
��������ϵͳ������Զ���ģ���������滮��ģ������
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0544-07
Collision avoidance planning of multiple autonomous vehicles based on hybrid automata and fuzzy logical
LIU Xiao-mei1, TIAN Yan-tao1, 2, WANG Lei1
(1. School of Communication Engineering, Jilin University, Changchun 130025, China;
2. Key Laboratory of Bionics Engineering, Ministry of Education, Jilin University, Changchun 130025, China)
Abstract: Collision avoidance control of multiple autonomous vehicle system in dynamic environment was modeled based on hybrid automaton theory. The speed adjustment, path adjustment, and combination of them were modeled and analyzed respectively. The mode state of autonomous vehicles under control and the switching relationship between them were explicated. Besides, a collision avoidance planning method based on fuzzy logic control in crossroad environment was designed. Let the angle between the paths, the distance and the time difference of arriving the pre-collision point between two vehicles as inputs of the fuzzy controller, and the speed and path adjusting angle as outputs, safe and effective operation of the autonomous vehicles was achieved. Experimental results verify the effectiveness of the control algorithm.
Key words: multiple autonomous vehicle system; hybrid automata; collision avoidance planning; fuzzy logical
ITS�ij���Э����ȫ������ؼ���һֱ�Ǹ����о����ص�֮һ����Ҫ�б���ָ�������ҵCAMP[1]������������ʩ��������VIIC[2]�ȡ����ż�����ȼ����ķ�չ��������������ȫ[3]�õ����ӣ������ܳ�ͨ����֪��Χ��������س�������Ϣ������������Ϊ���Ӷ�����Ԥ���¹ʵķ�����������ȫϵͳ���о�Ҳ�������ܻ��������Ͱ�ȫϵͳ���似������ չ[4]���ɴ˶������ĶЭ����ȫ�����������������ǵĹ㷺��Ȥ��������Ҫ��Ŀ��֮һ��ʵ�����ܳ��İ�ȫ�������������ܳ�Ҳ�ɳ�Ϊ�ƶ������ˣ���ˣ����Խ�����ڻ����˵Ķ�̬�������������о����Ƚϵ��͵���Takeshi[5]����3��ģ�����Ʒ��������ٶȺͷ���ʵ�ֶ�̬���ϣ�Rude[6]����ά��̬����ת��Ϊ��ά��̬�����µľ�̬�������⣻Ge��[7]�Ľ��˹��Ƴ��������ܻ����˱����Լ��ŷ��[8]����Ļ����������ϵ�Ķ�̬�����㷨�ȶ���Ч��ʵ���˱�����
ʵ�������н�ͨ·�����¹�Ƶ������[9]���ڶԶ�������ϵͳ�����о�ʱ����ײҲ��Ҫ������·���Ľ�����������������Ҫ�о�ʮ��·���мϵͳ�ı���������ģ�����㷨ʵ�֡��Э��������ȫ����ͬʱ�漰���ܳ�������ɢ״̬������״̬�����о���ǰ�˹���������������ڻ���Զ���ģ�͵ķ���������С����״̬��Ŀ�꼰���߷��������ۺ�����С���Ļ���ģʽ��ģ���������㷨��ʵ�ֶ��·���İ�ȫ��ʻ��
1 ��ģ����
�ٶ��������ܳ��ڹ�·������ִ������������ȫ���ƵĹؼ�����֮һ���DZ������ơ�����ʮ��·�ڵ���ײ������ͼ1��ʾ�����ܳ���ִ������ʱ����3����Ϊ������������̬�ϰ����������̬�ϰ������������Ŀ��㣬����ʵ�������������Ϊ������Ŀ�����Ϊ���������ԡ���ͼ1��ʾ����С��Car 1��Car 2ͬʱ��������B����ᷢ����ײ����˱���������3�ַ������ٶȵ�����·�ߵ������ٶȺ�·�ߵ������ϡ�
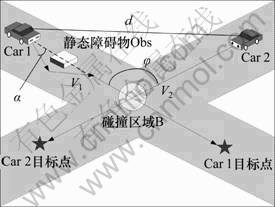
ͼ1 ��������ʮ��·�ڵ����л���
Fig.1 Environment of two cars at crossroad
�ٶȵ�������С���ٶȿɿط�Χ�ڼ��ٻ���٣�������С���о�·�߲��䣬ֻ��С����������ٶ����룬ʹ��2��������ͬʱ������ײ����
·�ߵ��������ܺ���С������·�����Ϊԭ�����ٶȲ��䣬ֻ��С���к���ת�ǵ����룬��Ϊ��������·�ߺ�˫��ͬʱ����·�ߣ���ͼ2��ʾ��
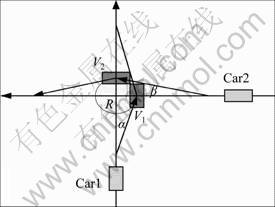
ͼ2 2��ͬʱ����·��ʾ��ͼ
Fig.2 Schematic diagram of adjusting routes of two cars
�ٶ���·�ߵ������ϣ���С��ͬʱ��������ٶȺͺ���ת�ǵ����롣
1.1 ���ܳ�����ѧģ��
���ܳ��Ķ���ѧģ�Ͱ�������ͺ�����ѧģ��2���֣�����·�渽��״���ϺõĹ�·��ʻ��������ģ�ͽ��м���ͼ�[10]������������ѧ����Ϊ��
![]() (1)
(1)
���У�����������ת��������ϵ����MΪ������������vΪ�����٣�Td��Tb�ֱ�ָ�������غ��ƶ����أ�rwΪ��̥�뾶��Fi��Fa��Ff�ֱ��ʾ�¶�����������������������������ã�
![]()
![]() ��
��
��![]() ��u1=Td-Tb��
��u1=Td-Tb��![]() ��b1=(-Fi-Fa- Ff)/ (��M)����С����������ѧ���̼��ɼ�Ϊ��
��b1=(-Fi-Fa- Ff)/ (��M)����С����������ѧ���̼��ɼ�Ϊ��
![]() (2)
(2)
������ѧ���о���ʻԱ��ϵͳ��ת��ָ���������������ʻ�����е��˶�ѧ�Ͷ���ѧ���ԣ�Ӱ�������������ķ����Ժ��ȶ��ԡ���������ֻ��ƽ����·���ƽ���˶����������ͼ�Ϊ1�����в�����˶���2���ɶȼ���ģ��[11]��ֻ���ǽǶ�����ĺ�����ѧģ��Ϊ��
 (3)
(3)
���У��ºͦطֱ��ʾ��ڽǶȺͽ��ٶȣ�K��1�� K��2�ֱ�Ϊǰ�����ֵIJ�ƫ�նȣ�IsΪ������ת��������MΪ������������vΪС�����������ٶȣ�La��LbΪǰ�����ᵽ���ļ�ľ��룻�����Ŷ����롣��

 ��
��![]() ��
��
����
![]() (4)
(4)
�ۺ�С���ĺ����������ѧģ�ͣ���![]() �����У�
������
![]() (5)
(5)
���У�![]() ,��ֵ�ɸ���ϵͳ��ʶʵ�鷽������С���˷���á�
,��ֵ�ɸ���ϵͳ��ʶʵ�鷽������С���˷���á�
1.2 ����Զ���ģ��
����Զ�����������Henzinger[12]��20����90�������ģ���1���������ϵͳ�ļ���ģ�ͣ������������ͼ��������������ɢ�������ϵͳ����Ϊ���ڻ���Զ����У�״̬�����������ַ��̿�����һ�����������������仯���̣�����״̬���л������¼���������
����1[13]���������������״̬��Ϣ�Ļ���Զ���![]() �����У�X��ŷʽ�ռ����Ӽ�������������Q��ģʽ�������ϣ�U�����������������O�����������������
�����У�X��ŷʽ�ռ����Ӽ�������������Q��ģʽ�������ϣ�U�����������������O�����������������![]() ��1����������
��1����������![]() ��ģʽ����ӳ�䣬
��ģʽ����ӳ�䣬![]() ��
��![]() �����ӳ�䣬����
�����ӳ�䣬����![]() ��X���ݼ�����X�������Ӽ��ļ��ϡ�
��X���ݼ�����X�������Ӽ��ļ��ϡ�
1.2.1 �ٶȵ����Ļ���Զ���ģ��
�����ܳ�Car1Ϊ����״̬��������Ϊ��![]() Ϊλ �ƣ�
Ϊλ �ƣ�![]() Ϊ�ٶȣ�
Ϊ�ٶȣ�![]() Ϊ���ٶȡ������ٶȵ�����Car1��3��ģʽ״̬[11]q1�� q2 ��q3����ʽ(6)��ʾ�����л���ϵ��ͼ3��ʾ��
Ϊ���ٶȡ������ٶȵ�����Car1��3��ģʽ״̬[11]q1�� q2 ��q3����ʽ(6)��ʾ�����л���ϵ��ͼ3��ʾ��
��ͼ3��֪������������ٶ����������u=0��С��������ʻ��������٣���ʹ��������![]() ����״̬�л�Ϊ
����״̬�л�Ϊ![]() ��
��![]() ����С����Ϊvmin��
����С����Ϊvmin��![]() ����֮�����������ʹ��������
����֮�����������ʹ��������![]() ����״̬�л�Ϊ
����״̬�л�Ϊ![]() ��
��![]() �������Ϊvmax��
�������Ϊvmax��
 (6)
(6)
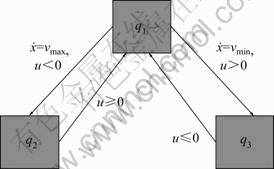
ͼ3 �ٶȵ���ģʽת��ͼ
Fig.3 Mode shift map of speed adjustment
�ٶȵ����Ļ���Զ���ģ��![]() (X, Q, U, O, f, R, h)�����У�������������
(X, Q, U, O, f, R, h)������������������![]() ����
���� ![]()
![]()
![]() ��ģʽ����Q ={q1, q2, q3}�����뼯��
��ģʽ����Q ={q1, q2, q3}�����뼯��![]() ��
��![]() ���������
���������![]() ����״̬����X���Ӽ��ļ��ϣ�ӳ��
����״̬����X���Ӽ��ļ��ϣ�ӳ��![]() ������ģʽQ��״̬X�£���������U���ɵõ��µ�λ�ƺ��ٶȣ���q1��
������ģʽQ��״̬X�£���������U���ɵõ��µ�λ�ƺ��ٶȣ���q1��![]() ����q2��q3��
����q2��q3��![]() ��
��![]() ��ʾ��ǰ״̬�ڿ�������������¶�Ӧ��һ��ģʽ��ӳ�䣻ӳ��
��ʾ��ǰ״̬�ڿ�������������¶�Ӧ��һ��ģʽ��ӳ�䣻ӳ��![]() �������״̬����X���Ӽ����ϵ�ӳ�䡣
�������״̬����X���Ӽ����ϵ�ӳ�䡣
1.2.2 ·�ߵ����Ļ���Զ���ģ��
С����״̬����![]() ����С������תΪ������
����С������תΪ������![]() ����תʱ
����תʱ![]() ������·�߲���ʱ
������·�߲���ʱ![]() ������С��������Ŀ����������Ŀ��㣬��˻���С��ֱ��·���ľֲ�·�ߵ�����������Ϊ0��С���ĺ�����ѧģ��������С������ת�ǵĽ��ٶȺͽǼ��ٶȣ���������ϵͳ���ԣ�ת��ʱ����Ժ��Բ��ƣ��Ƶ���С��ת�������3��ģʽ״̬p1��p2��p3����ʽ(7)��ʾ�����л���ϵ��ͼ4��ʾ��
������С��������Ŀ����������Ŀ��㣬��˻���С��ֱ��·���ľֲ�·�ߵ�����������Ϊ0��С���ĺ�����ѧģ��������С������ת�ǵĽ��ٶȺͽǼ��ٶȣ���������ϵͳ���ԣ�ת��ʱ����Ժ��Բ��ƣ��Ƶ���С��ת�������3��ģʽ״̬p1��p2��p3����ʽ(7)��ʾ�����л���ϵ��ͼ4��ʾ��
 (7)
(7)
��ͼ4��֪��������ת���ٶȣ����������u=0��С������·�߲��䣻����ת����ӿ�������u�� u��0����ģʽp1��ת��p2��ֱ�����˵�ת��ǶȦ�max��-��max�����ţ�С�����ֵ�ǰ��ת��Ƕȿ�ʼ0�Ƕ���������У�����ת��ģʽp3����������u=0��ʻ��ָ��λ�ã������������u��0��ʹ��С����ʼ�ָ�ԭ��ʻ·�ߣ�����ģʽp3��ת�ص�ģʽp1��С���ָ�ԭ��ʻ·�ߣ���·�ߵ��������е�һ��ģʽת��������
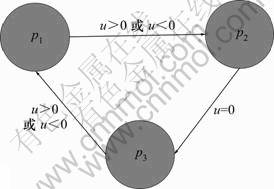
ͼ4 ·�ߵ���ģʽת��ͼ
Fig.4 Mode shift map of route adjustment
·�ߵ����Ļ���Զ���ģ��![]()
![]() ������
������![]() ��
��![]()
![]()
![]()
![]() ��ģʽ����
��ģʽ����![]() ��
��
1.2.3 �ٶȺ�·�ߵ������ϵĻ���Զ���ģ��
������ϵͳ���ԣ�С���ӿ�ʼת��ת�����ʽǶȵ�ʱ����Ժ��Բ��ƣ��������ʱ���ڣ��趨�ٶȱ��ֲ��䣬��ˣ���ʱС����3��ģʽ״̬Q1��Q2��Q3����ʽ(8)��ʾ�����л���ϵ��ͼ5��ʾ��
 (8)
(8)
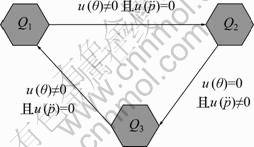
ͼ5 �ٶ�·�ߵ�������ģʽת��ͼ
Fig.5 Mode shift map of combination of speed and route adjustment
��ͼ5��֪��С���Ƕȵ������֮��ʵʩ�ٶȵ���������ģʽp3״̬�¼���ģʽq1��ģʽת��ͼ��ͼ4���ƣ��ڴ˲�������ͬʱ����Զ���ģ��Ϊ![]() �����У�
������![]()
![]() ��
��![]() ��
��
���ָ���·�����ӳ���״̬������������Էֽ�Ϊ������֮���Э��������ֻ����2�����еĻ���Զ�������������ǣ����ۿ�����չ�����������IJ��л���Զ���ģ�͡�
����2[14]������![]() ��
��![]()
![]() �ǻ���Զ����ļ��ϡ������Dz��нṹ����
�ǻ���Զ����ļ��ϡ������Dz��нṹ����![]() ����������Զ���
����������Զ���![]()
![]() ������
������![]() ��
��![]() ��
��![]()
![]() ��
��![]() ��
��![]() ��
��
N��ϵͳ���Ա���ģ��N��ӳ��Ļ���Զ������нṹ����![]() ������ÿ1��Hi������������3��
������ÿ1��Hi������������3��![]() �е�����1�֣����нṹģ����ͼ6��ʾ��N=2ʱ��
�е�����1�֣����нṹģ����ͼ6��ʾ��N=2ʱ��![]() ��2��С���������ײ��вʱ���ֱ�������У���2�������Ļ���Զ���ģ�ͣ���
��2��С���������ײ��вʱ���ֱ�������У���2�������Ļ���Զ���ģ�ͣ���![]() ����ģ��Ϊ
����ģ��Ϊ![]() ��������ϼ��ϡ���2���������ײ��в������������������ȡ��Ч�ı������ԡ���ʡʱ����ΪĿ�꣬�����������ٶ�������ʱ��������ٶȵ�����·�ߵ������Ͻ��б�����
��������ϼ��ϡ���2���������ײ��в������������������ȡ��Ч�ı������ԡ���ʡʱ����ΪĿ�꣬�����������ٶ�������ʱ��������ٶȵ�����·�ߵ������Ͻ��б�����
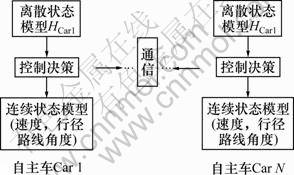
ͼ6 ���нṹģ��
Fig.6 Parallel model
2 �����㷨ʵ�������
2.1 ���������㷨
������ͬ��С����Car1�ܿ���̬�ϰ������Ϊ����Ϊ����С���ߴ糤�Ϳ��ֱ�Ϊl��w��������㷨���¡�
Step1������ȫ����Ϣ����С���Ĵ�������������ǰ���ٶ�v1��v2�������������о�·��֮��ļнǦգ�2�������ĵ�����ײ��֮��ľ���d1��d2��
Step2������![]() ��
��
(a) ��![]() ����Car1������vmax��Car2���٣�ʹCar1��ͨ����ײ���Car2��δ��յ���ײ�㣬��ɽ������ٶȵ���ʵ�ֱ�����
����Car1������vmax��Car2���٣�ʹCar1��ͨ����ײ���Car2��δ��յ���ײ�㣬��ɽ������ٶȵ���ʵ�ֱ�����
(b) ����ͨ���ٶȵ���ʵ�ֱ���������ʵʩ·�ߵ����������ǶȦ�max���㷽����ͼ4��ʾ�����У�![]() ����
����![]() ��
��![]() �����Ǿ�̬�ϰ������뾶��
�����Ǿ�̬�ϰ������뾶��
Step3����![]() ����Car2��Ϊ���ƶ�������Step2����ͬ��
����Car2��Ϊ���ƶ�������Step2����ͬ��
Step4��ͨ����ײ�����С��������ٶ�������Ŀ��㣬���ӽ�Ŀ���ʱ����ͣ����
���ڽ�ģ�����Ļ��������㷨�DZȽϼģ���Ҫ�����ڻ�����Ϣʵʱ��ȷ�Ļ����ϲ���ʵ�֡�����ʵ��ʵ�鼰�����У�����������Ϣ�ɼ���Χ����ȷ�ȶ������ƣ���ˣ����о��������ģ�����Ƶı����㷨�����бȽ��к�ʵ�ʵ�ʵ�顣
2.2 ����ģ�����ı����㷨����
���ܳ�������ȫ�����ǻ��ڴ�������Ϣ�ľֲ�·���滮�����ϰ���ijߴ硢��״��λ�õ���Ϣ����ͨ���������ֲ���Χ�ڻ�ȡ������С��ϵͳ����ս�����ڴ�������£��ﵽʵ�������г��н�ͨ·�ڼݳ�����״̬����Ӧ�ԡ�ģ�����㷨[15]�ǻ���ʵʱ����������Ϣ���ο�����ļ�ʻ������ƹ������ͨ������������Ҫ����Ϣ���������С��ʵ���Դ���Ҫԭ����С��������ʼ�㵽Ŀ�����˶������У�ÿ��һ��ʱ�����ϰ������Ϣ���ο���Ϊ������С����һ�����ж����ߡ�
2.2.1 �������������ѡ����ģ����
ѡȡС��������С��(��̬�ϰ���)�н�·�нǦա��������d����������Ԥ�����ʱ��t��Ϊģ����������������ͼ7��ʾ�����У��շ�ӳ��С�����ٶȷ�����Ϣ��ʱ��t=t1-t2����С�����ٶȴ�С��Ϣ��t1��t2�ֱ�ΪС������������С��������ײ�������ʱ�䣻![]() ��ʾ����С���ȵ�����ײ�㡣ģ������ϵͳ���������С����һ����Ϊ���ٶ�v��ת�Ǧȡ�
��ʾ����С���ȵ�����ײ�㡣ģ������ϵͳ���������С����һ����Ϊ���ٶ�v��ת�Ǧȡ�
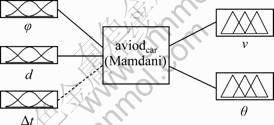
ͼ7 ģ�����ƽṹͼ
Fig.7 Fuzzy control structure
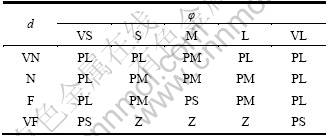
�ڶ����������ȷ��������ģ����ʱ������t��Z���ϲ�ȡ(-2.5, 2.5)�ķ�Χ�⣬�������������ݸ��Եķ�Χ���������Գ������ε������Ⱥ����������þ����Mamdaniģ��ģ�͡����ƽṹͼ��ͼ7��ʾ��ģ����������1��ʾ��
��1 ��������ģ�����ϼ��������Χ
Table 1 Fuzzy set of each variable and variable range

2.2.2 ģ��������ƶ�
ģ�����������ǽ���˵ļ�ʻ���飬����С����ӵ�е�����ٶȣ�ͬʱ��������С����λ�ú��ٶȣ�������С���ܷ�����ײ��ͨ������ײ�ص㣬�ƶ�С������Ϊ���ԣ���ȫ����������ͨ������ײ�ص���߲�ȡ���õȴ��IJ����ù�����С��������������С��������ǰ��Ϊ�����ƶ�ģ������
���ת�Ǧȵ�ģ������Ϊ����![]() ʱ��С����ת��ת�Ƿ�����պ�d�йأ�dԽСת���Ƕȵķ���Խ��
ʱ��С����ת��ת�Ƿ�����պ�d�йأ�dԽСת���Ƕȵķ���Խ��![]() ʱ����ԽС����ת���Ƕȵķ���Խ��
ʱ����ԽС����ת���Ƕȵķ���Խ��![]() ʱ��
ʱ��![]() Խ����ת���Ƕȵķ���Խ��
Խ����ת���Ƕȵķ���Խ��![]() ʱ��С����ת��ģ����������תʱ���ơ�����ٶ�v��ģ������Ϊ����
ʱ��С����ת��ģ����������תʱ���ơ�����ٶ�v��ģ������Ϊ����![]() ʱ��С�����٣�dԽС�����ٵķ���Խ��
ʱ��С�����٣�dԽС�����ٵķ���Խ��![]() ʱ����ԽС������ٵķ���Խ��
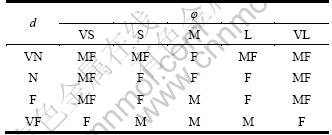
ʱ����ԽС������ٵķ���Խ��![]() ʱ����Խ������ٵķ���Խ��֮������t��0ʱ��С�����٣�ģ�����������ʱ�����ƣ�����������2~5��ʾ��
ʱ����Խ������ٵķ���Խ��֮������t��0ʱ��С�����٣�ģ�����������ʱ�����ƣ�����������2~5��ʾ��
������������ͬ������£�����С��������ǰ��ʱ��ת��������䴦����ǰ��ʱ��С��ͬ�������෴���ٶ����������С��������ǰ��ʱ����ͬ��
��2 ![]() ʱ��������ȵ�ģ������
ʱ��������ȵ�ģ������
Table 2 Fuzzy rules of output variable �� when![]()
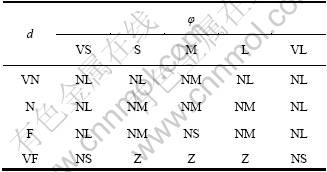
��3 ![]() ʱ��������ȵ�ģ������
ʱ��������ȵ�ģ������
Table 3 Fuzzy rules of output variable �� when![]()
��4 ![]() ʱ�������v��ģ������
ʱ�������v��ģ������
Table 4 Fuzzy rules of output variable![]() when
when![]()
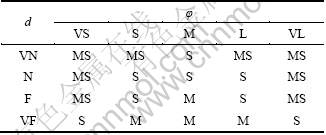
��5 ![]() ʱ�������
ʱ�������![]() ��ģ������
��ģ������
Table 5 Fuzzy rules of output variable v when![]()
3 ʵ���������
���ڱ����㷨��ʵ����֤��Ҫ�д�·����ȷ����ʵ�ֱ�����ʵ������ͼ8��ʾ���Լ�����ģ������ʮ��·�ڱ������ƣ�ʵ������ͼ9��ʾ��
ͼ8��ʾΪ���������ʱ�����·���滮�ı�������ʵ��������ͨ���������õ����ܷ�����ײ����Ϣ����Ԥ��ײ���滮һ������Բ��������뾶ȡ�������ܳ��ijߴ磬ʹ��С���ܰ�ȫͨ��������������ȴ�ʱ�䣬����![]() ��Ȼ����С����·�������Ƕ�
��Ȼ����С����·�������Ƕ�![]() ��ͨ��������֮��ָ�ԭʼ�о�·��������Ŀ��㡣
��ͨ��������֮��ָ�ԭʼ�о�·��������Ŀ��㡣
ͼ8 ��βʽ��·���滮����
Fig.8 Rear-end-style path planning collision avoidance
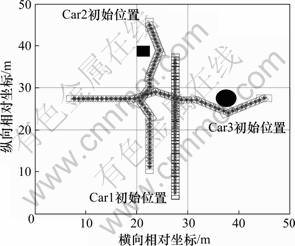
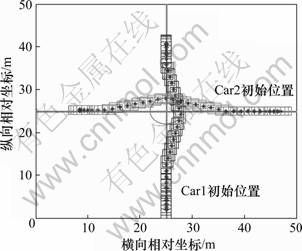
ͼ9 ����ģ�����ı�������
Fig.9 Collision avoidance control based on fuzzy
ͼ9��ʾΪ����ģ����ʵ�ֱ����Ŀ���ʵ���о���������ʵ�ʹ����п��ܳ��ֳ�����·��ά��״������ʵ����������2����̬�ϰ���(��ɫ����)��С���������������С����˵��Ϊ��̬�ϰ��ﴦ����ʵ����С����ʼ״̬��Ϊ���ٶ�![]() ������ʻ��������Ŀ���Ϊǰ�ᣬ�����ϰ���ı���Ϊԭ��ʵ���ٶ�·�������滮��Car2��Car3��ͨ��ģ�����㷨�������ٶȺ�·���ܿ���̬�ϰ���֮���������ܻ���
������ʻ��������Ŀ���Ϊǰ�ᣬ�����ϰ���ı���Ϊԭ��ʵ���ٶ�·�������滮��Car2��Car3��ͨ��ģ�����㷨�������ٶȺ�·���ܿ���̬�ϰ���֮���������ܻ���![]() �ļнǷ�����ײ�����������ģ������������״̬ͨ��Ԥ���㣬�ָ���ʻ��ͬʱ��Car1���й����У��䴫��������Car3�бȽ�С���ܵ���ײ��в��Ϊȷ����ȫ��Car1����ͨ������ڣ�Ȼ��ָ������ٶȣ�������ʻ�����3��ʵ�ֱ������ֱ�������Ե�Ŀ��㣬��֤����ϵͳ�İ�ȫ�ԡ�
�ļнǷ�����ײ�����������ģ������������״̬ͨ��Ԥ���㣬�ָ���ʻ��ͬʱ��Car1���й����У��䴫��������Car3�бȽ�С���ܵ���ײ��в��Ϊȷ����ȫ��Car1����ͨ������ڣ�Ȼ��ָ������ٶȣ�������ʻ�����3��ʵ�ֱ������ֱ�������Ե�Ŀ��㣬��֤����ϵͳ�İ�ȫ�ԡ�
4 ����
(1) ���û���Զ���ģ�ͶԱ������ƽ��н�ģ�����������ٶȵ�����·���������ٶ�·����������3�ַ�ʽ�Ľ�ģ���Ա�����������������״̬ģʽת�������������ӱ����Ϸ����˱��������п���������״̬�Ĺ�ϵ�������������ṩ��ǰ�������
(2) ���ģ����������С��ʵʱ���Ƶ��ص㣬�����1�ֶ�����滮�㷨����2���о�·�ߵĽǶȡ�����֮��ľ���͵���Ԥ�����ʱ�����Ϊ�� �룬С����������ٶȼ��ٶȷ���ı�ĽǶ���Ϊ�����ʵ�ְ�ȫ��Ч��ʵʱ���ơ�
�ο����ף�
[1] Schagrin M. Cooperative Intersection Collision Avoidance Systems (CICAS) [EB/OL]. 2011- 06-06, http://www.its.dot. gov/cicas.
[2] Vehicle Infrastructure Integration (VII) [EB/OL]. 2010-10-30, http://www.vehicle-infrastructure.org/.
[3] л��ƽ. ���ڶЭ����֪��������ȫ�����о�[D]. �Ϻ�: �Ϻ���ͨ��ѧ������Ϣ���������ѧԺ, 2009: 63-70.
XIE Jian-ping. Research on active safety based on multi-vehicle collaborative perception[D]. Shanghai: Shanghai Jiaotong University. School of Electronics and Electric Engineering, 2009: 63- 70.
[4] ����. ������������ʻ������ȫϵͳ�о�[D]. ����: �����ѧ�Զ���ѧԺ, 2003: 9-13.
LIU Tao. Study on initiative safety system of smart vehicle[D]. Chongqing: Chongqing University. College of Automation, 2003: 9-13.
[5] Takeshi A. Motion planning for multiple obstacles avoidance of autonomous mobile robot using hierarchical fuzzy rules[C]// Proceedings of the IEEE International Conference on MFI. Las Vegas, 1994: 265-271.
[6] Rude M. Collision avoidance by using space time representations of motion processes[J]. Autonomous Robots, 1997, 4(1): 101-119.
[7] Ge S S, Cui Y J. Dynamic motion planning for mobile robots using potential field method[J]. Autonomous Robots, 2002, 13(3): 207-222.
[8] �ŷ�, ̸����. һ�ֻ����������ϵ���ƶ������˶�̬ʵʱ�������·���[J]. ������, 2003, 25(1): 31-35.
ZHANG Feng, TAN Da-long. A new real-time and dynamic collision avoidance method of mobile robots based on relative coordinates[J]. Robot. 2003, 25(1): 31-35.
[9] Miura J, Itoh M, Shirai Y. Toward vision-based intelligent navigator: its concept and prototype[J]. IEEE Transactions on Intelligent Transportation System, 2002, 3(2): 136-146.
[10] ղ��. ��������ӦѲ�����Ƶ�����������ѧģ�͵Ľ���. ���ִ�ѧѧ��: ��ѧ��, 2006, 36(2): 157-160.
ZHAN Jun. Setup of vehicle longitudinal dynamic model for adaptive cruise control[J]. Journal of Jilin University: Engineering and Technology Edition, 2006, 36(2): 157-160.
[11] ����.���ܳ�����ѧģ�Ͳ�����ʶ�����о�[D]. �Ϻ�: �Ϻ���ͨ��ѧ������Ϣ���������ѧԺ, 2009: 61-66.
FANG Xing. Research on identification of dynamic parameters for intelligent vehicle[D]. Shanghai: Shanghai Jiaotong University. School of Electronics and Electric Engineering, 2009: 61-66.
[12] Thomas A, Henzinger Z. The theory of hybrid automata[C]// Proceedings of the 11th Annual IEEE Symposium on Logic in Computer Science. New Brunswick: IEEE Press, 1996: 278-292.
[13] Desaraju V, Ro H C, Yang M, et al. Partial order techniques for vehicle collision avoidance: application to an autonomous roundabout test-bed[C]// Proceedings of the IEEE international conference on robotics and automation. Kobe: IEEE Press, 2009: 82-87.
[14] Verma R, Vecchio D D. Continuous control of hybrid automata with imperfect mode information assuming separation between state estimation and control[C]// Proceedings of the 48th Conference on CDC/CCC. Shanghai: IEEE Press, 2009: 3175-3181.
[15] Sugeno M, Nishida M. Fuzzy control of model car[J]. Fuzzy Sets and Systems, 1985, 16(2): 103-113.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(60675057)�����ִ�ѧ��985���̡������Ƽ�����ƽ̨��Ŀ(2010)
ͨ�����ߣ�������(1958-)���У�������ƽ�ˣ���ʿ�����ڣ����·ֲ�ʽ����ϵͳ�о����绰��0431-85095769��E-mail: tianyt@jlu.edu.cn
ժҪ�����ڻ���Զ���ģ�����۶Զ�̬�����еĶ�������ϵͳ�������ƽ��н�ģ���ֱ���ٶȵ�����·���������ٶ�·���������ϵĹ��̽��н�ģ��������ȷ������������������ģʽ״̬�����л���ϵ�������1�ֻ���ģ�������Ƶ�ʮ��·�ڶ�����滮�������������о�·�ߵĽǶȡ�����֮��ľ����Լ�����Ԥ�����ʱ�����Ϊ���������룬С�����ٶȺ�·�������Ƕ���Ϊ�����ʵ����������ȫ��Ч�����С�ʵ������֤�˿����㷨����Ч�ԡ�
