
���ڸ�Ӧ��������۲������ٶȱ�ʶ
������1, 2���� ��2������Ϊ3
(1.���ϴ�ѧ ��е�����ع���ѧԺ������ ��ɳ��410082��
2. �������⾭��ѧԺ �������ģ����� ��ɳ��410205��
3. ��ɳ��ѧ �Ƚ����켼�����ģ����� ��ɳ��410003)
ժ Ҫ��
ժ Ҫ�����ģ�Ͳο�����Ӧ�ٶȱ�ʶ������Ȼ���ʶ���ȸߣ�������ѧģ���ӣ�������ʵʱ��������Ҫ���ٿ�������֮ƥ��Ȳ��㣬���һ�ֽṹ��������ʵ�ֵĸ�Ӧ���ֱ��ת�ؿ�����ת�Ӵ����Ĺ۲ⷽ����������Ӧ���ת�Ӵ���������ת������ģ�ͣ����Ե��ת�ٽ��й��㡣�����о�����������÷����ܹ�������ߵ��ٹ۲⾫�ȣ����Ե�������ı仯���ֳ����õ�ϵͳ³���ԡ�
�ؼ��ʣ�
��ͼ����ţ�TM464 ���ױ�־�룺A ���±�ţ�1672-7207(2009)06-1599-05
Induct motor speed identification based on flux observation
ZENG Yi-hui1, 2, ZHU Hao2, ZHU You-wei3
(1. College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China;
2. Computer Numberical Control Tooling Center, Hunan International Economics University, Changsha 410205, China;
3. Advancing Manufacturing Technology Centre, Changsha University, Changsha 410003, China)
Abstract: Based on the fact that the model reference adaptive speed identification method has identification with high precision, but its mathematical model is very complex, and it has to match high-speed controller in real-time control, an observation on the rotor flux of the induct machine direct torque control was presented, and the mathematics model of the rotor flux and flux slip was built to estimate the motor speed. The simulation results show that the low speed observation accuracy can be improved using this method, and robust characteristic of the system is enhanced when motor parameter changes.
Key words: flux observation; motor speed identification; direct torque control
�ڸ������첽�綯����Ƶ����ϵͳ�У��ٶȼ������ù�����������[1-2]�����ٶȴ������İ�װһ���������˿���ϵͳ�ɱ���������ϵͳ�Ŀɿ��ԣ���һ���棬��ij�̶ֳ���ʹ���͵綯���ṹ���ӣ��ι����ܱ���ˣ����ٶȴ�����������ΪĿǰ���������������о����⡣������20����70����Ϳ�ʼ�����ٶȴ��������о����磺Abbondanti��[3]���������ٶȴ�����ʸ�����Ƶ��첽�������ϵͳ�����Ǵ���̬��·��ã����Ա�֤�������ܺ;��ȣ�Onrani[4]��������������ϵ�ת�ٱ�ʶ�������˺�Tamai��[5]������ģ�Ͳο�����Ӧ����(MRAS)�����ڽ���ٶȱ�ʶ�ϵ��������⣬�õ��˹㷺Ӧ�á��ڴˣ������������һ�ֻ��ڴ����۲������ٶȱ�ʶ�����ٶȹ۲⾫�ȱ�ģ�Ͳο�����Ӧ�����Ĺ۲⾫�ȵͣ�������ѧ�ṹ���������ø��ӵĿ������ۺ������������м��㣬����ʵ�֡�
1 ���ڴ����۲����ĵ���ٶȹ���
ֱ��ת�ؿ����ǻ��ڶ��Ӵ������Ƶģ���������ɢʽ��2����ڣ�ʵ�ֶ��Ӵ����ķ�ֵ����λ����[6]���Զ��Ӵ����Ĺ۲�ֵΪ�����������ת�Ӵ������ٴ�ת�Ӵ����й��Ƴ�ת���ٶȡ��������㷽����һ�ֽϺõ��ٶȹ��Ʒ���[7]�����ٶȹ��ƵĽ���ض��Զ��Ӳ������ֳ����õ�³���ԡ��綯����ת�Ӵ���yr��һ��δ֪��������ת�ӵ�ѹ�͵����IJ��������㣬������ݶ��Ӵ���ֵ�����й��ơ��ڸ��ٶȹ��Ʒ����У�Ϊ�˼����⣬���ټ����������õ�ѹģ��������ת�Ӵ���[8-9]���綯�������ŷ��綯��Em���Ա�ʾΪ��
![]()
��ת�Ӵ����Ĺ������ʽ���£�

��ʽ(2)���Կ�����ת�Ӵ����Ĺ����붨�Ӵ�����أ�����ת�ӵ���Rr��[10-11]����ˣ�ֻҪ���Ӵ����Ĺ۲����һ�����ȣ��������ת�Ӵ����۲�ľ���Ҫ��
2 ����ٶȵĹ���
�첽�綯���ھ�ֹ������ͦ������ϵĵ�ѹ���̿��Ա�ʾ�����¾�����ʽ[12]��

������ʽ���Եõ�ת�Ӵ����۲��2�ֲ�ͬģ�ͣ���ѹģ�ͺ͵���ģ�͡�

��ʽ(5)��(6)�ɼ�����ѹģ�Ͳ�������ٶȦ�r�������ģ�Ͱ�����r������ת�Ӵ����ĵ���ģ�ͳ������������ٶȵĹ��㹫ʽ��
��ʽ(8)��(12)�����Թ��������ٶȦ�r������ʽ(8)�к���ת�Ӵ�����������Խ���ʽת����ǰ���ֵ���ʽ[13]������
3 �ٶȹ��Ƶķ���
���������Ƴ���ת�Ӵ������㹫ʽ��ת���ٶȼ��㹫ʽ�����Խ����ٶȹ��Ƶķ���ģ�ͣ���ͼ1��ʾ��ģ�͵�����Ϊ���Ӵ���ys�����ӵ���is�͵��ת��Te�����ת����DTCϵͳ��ת�ع۲����ṩ��

ͼ1 ���ڴ����۲���ٶȹ��Ʒ���ģ��
Fig.1 Simulation model of speed estimation based on flux observation
���ٶȹ���ģ��ֱ�Ӽ��뵽DTC��Ƶ����ϵͳ�У������ٶ�![]() ֻ���ڽ����ٶȹ۲⣬����Ϊ�ٶȷ����źŲμ�ϵͳ����[14]��DTC����ϵͳ����ٶȵ������ķ����ź���Ϊ����ṩ����ʵת�١�
ֻ���ڽ����ٶȹ۲⣬����Ϊ�ٶȷ����źŲμ�ϵͳ����[14]��DTC����ϵͳ����ٶȵ������ķ����ź���Ϊ����ṩ����ʵת�١�
Ϊ�˿����ٶȵĹ��㾫�ȣ��ı�DTC����ϵͳ���ٶȸ���![]() ���������ٶ�
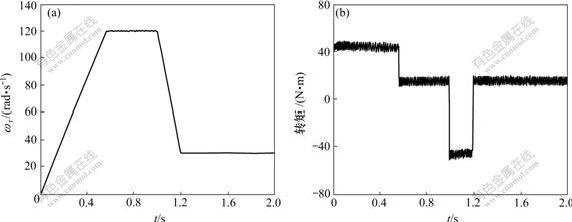
���������ٶ�![]() ��綯��ʵ��������ٶȦ�r���жԱȡ�ͼ2��ʾΪ�����ٶȲ�ͬʱ��ʱ���ת�ٵĹ��Ʋ��Σ�ͼ3��ʾΪ����ٶȦ�r����������120 rad/s�����䡪�½���30 rad/sʱ��ͬ����״̬�µ���Ĺ����ٶȺ͵��ת����Ӧ���Ρ�
��綯��ʵ��������ٶȦ�r���жԱȡ�ͼ2��ʾΪ�����ٶȲ�ͬʱ��ʱ���ת�ٵĹ��Ʋ��Σ�ͼ3��ʾΪ����ٶȦ�r����������120 rad/s�����䡪�½���30 rad/sʱ��ͬ����״̬�µ���Ĺ����ٶȺ͵��ת����Ӧ���Ρ�

(a) ![]() =100 rad/s; (b)
=100 rad/s; (b) ![]() =10 rad/s
=10 rad/s
ͼ2 �ٶȸ�����ͬʱ���ת�ٵĹ��Ʋ���
Fig.2 Speed estimate waveforms for different speed settings
(a) �����ٶȣ�(b) ���ת��
ͼ3 ����ٶȱ仯�Ĺ����ٶȺ͵��ת�صIJ���
Fig.3 Dynamic waveforms of estimate speed and electromagnetic torque
��ͼ2��ͼ3���Կ����������ٶȹ������Ĺ��㾫�Ƚϸߣ��������ڵ��ٻ����ڸ��٣��������������̬ʱ����Ч���á�ֻ���ڵ���ʱ����һ����������������Ϊ�˼����ٶ��ź��е�������������ٶ��źŽ��е�ͨ�˲����˲�ǿ��Խ�����������Խ�á����˲�ǿ�ȹ���ᵼ���ٶȹ������Ķ�̬���ܱ�����������֮���������ѡ��
��������ı仯��Ҫ�Ƕ��ӵ���Rs��Rr�ı仯�����ֱ仯���ܻ�Ӱ���ٶȹ��ƽ��[15]��Ϊ��ȷ������ٶȹ��Ƶ�Ӱ��̶ȣ���ʵ�ʶ�ת�ӵ���仯���ٶȱ�ʶ��Ӱ����з��棬������[9]��֪�������������仯��ΧΪ0~150%����R��s=1.5Rs��R��r=1.5Rr 2�ֶ�ת�ӵ���仯������ٶȹ��ƽ����ʵ���ٶȽ��жԱȣ������ͼ4��ʾ����ͼ4(a)���Կ�����������ٶȱ���ʵ�ٶ���0.2 s������ʱ�ӡ�������Ϊ���ӹ۲����������ʵ����ʱ��Rs�����仯������һ������ʱ�ӣ���ʹ�ٶȵĹ���Ҳ��������ʱ�ӡ�ʵ���ϣ����ӵ���ı仯�Ƿdz������ģ���������ʱ�Ӳ������ڣ����ٶȹ��Ƶ���̬���Ȳ�û����Rs��Ӱ�졣��ͼ4(b)���Կ����������ٶ�����ʵ�ٶ���������ͬ����˵�����ߵ����dz�С����ת�ӵ���Rr�ı仯�Թ����ٶȵľ���Ӱ���С��������ΪRr������С����ʽ(12)��֪��RrֻӰ��ת���ٶȦ�sl������sl����ڦ�e�ֺ�С�����ԣ�Rr���ٶȹ��Ƶľ���Ӱ���С��

(a) R��s=1.5Rs; (b) R��r=1.5Rr
1����ʵ�ٶ�; 2�������ٶ�
ͼ4 Rs��Rrƫ����ʵֵʱ�ٶȹ�������ʵ�ٶȶԱ�����
Fig.4 Contrast curves between estimated speed and actual speed when Rs and Rr are away from its actual values
4 �� ��
a. ��������ٶȹ������㷨��ֱ�ۣ�ʵ�ֽ����ס���ϸ����ܵĶ��Ӵ����۲������ܻ�ýϸߵ���̬���ƾ��ȺͶ�̬���ܡ�
b. ���ٶȹ����㷨������۲������ϣ������ܶ��Ӵ����۲������������������Ļ������Ե�������ı仯���ֳ����õ�³���ԣ�ͨ�����Ӵ���ֵ�����ת�Ӵ�����������ת�Ӵ�������ʵ�ֶԵ��ת�ٵĹ��ơ�
c. �����ٶȹ�������Ȼ��ת�ӵ����Ӱ�죬��������֤ʵ��Ӱ��dz�С�����ٶȹ��������нϸߵĹ۲⾫�ȣ��ر����ڽϵ͵�ת�ٷ�Χ�����ܱ������������ܡ�
�ο����ף�
[1] Swamy M, Kume T, Maemura A, et al. Extended high speed operation via electronic winding change method for ac motors[C]// 2004 39th IAS Annual Industry Applications Conference. Seattle, 2004: 608-614.
[2] ������, �ųл�, �Ŵ�ˮ. ��Ƶ�����첽�綯��Ч���Ż����Ƶ��о���չ[J]. �繤����ѧ��, 2004, 19(5): 36-42.
CUI Na-xin, ZHANG Cheng-hui, DU Chun-shui. Advances in efficiency optimization control of inverter-fed induction motor driver[J]. Transactions of China Electrotechnical Society, 2004, 19(5): 36-42.
[3] Abbondanti A, Brennen M. variable speed induction motor drives use electronic slip calculator based on motor voltages and currents[J]. IEEE Trans on Industry Application, 1975(11): 483-488.
[4] Ontani T. A new method of torque control free from motor parameter variation in induction motor drives[C]//Proceedings of IEEE-IAS Annual Meeting Conf, 1986: 203-229.
[5] Tamai S, Sugimoto H, Yano M. Speed sensorless vector control of induction motor with model reference adaption system[C]// Proceedings of IEEE-IAS Annual Meeting Conf, 1987: 189-195.
[6] Klumpner C, Nielsen P, Boldea I, et al. A new matrix converter motor(mcm) for industry applications[J]. IEEE Trans Ind Electronics, 2002, 49(2): 325-335.
[7] ������. ����״̬�۲������첽������Ӵ����۲���ٶȱ�ʶ[J]. �Ϻ���ѧѧ��: ��Ȼ��ѧ��, 2008, 59(4): 349-354.
SONG Wen-xiang.Stator flux linkage and speed estimation of induction motor based on full-order state observer[J]. Journal of Shanghai University: Natural Science Edition, 2008, 59(4): 349-354.
[8] �� ��, ���濵. ����ת�Ӵ����۲�����ٶȴ�����PMSM DTC[J]. �㽭��ѧѧ��: ��ѧ��, 2006, 35(7): 1276-1280.
SUN Dan, HE Yi-kang. Rotor flux observation based sensorless PMSM DTC[J]. Journal of Zhejiang University: Engineering Science, 2006, 35(7): 1276-1280.
[9] ������. ֱ��ת�ؿ���ȫ�״����۲�������Ƽ���ɢ����[J]. ��Ƶ������, 2008, 36(5): 53-55, 62.
SHEN Tian-min. The design and emulation of full-order stator flux observer[J]. The World of Inverters, 2008, 36(5): 53-55, 62.
[10] YANG Cheng-feng, LIN He-yun, GUO Jian. Magnetic field analysis of hybrid excitation brushless claw-pole motor with three-dimensional finite element method[C]//The Eighth International Conference on Electrical Machines and Systems. Nanjing, 2005: 213-219.
[11] Asher O, Sumnerm G. Comparative analysis of experimental performance and stability of sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2006, 53(1): 178-186.
[12] Surapong S, Somboon S. Design strategy of an adaptive full-order observer for speed sensorless induction-motor drives-tracking performance and stabilization[J]. IEEE Transactions on Industrial Electronics, 2006, 53(8): 96-119.
[13] Kim J P, Yoon T, Kim J M, et al. Design of an ultra wide2band printed monopole antenna using FDTD and Genetic Algorithm[J]. Microw Opt Tech Lett, 2005, 15(6): 395-397.
[14] �� �. ȫ���ֽ�������ͬ������ŷ�ϵͳ���[J]. ������Һѹ, 2009, 58(1): 4-9.
AN Jiao. Design of PMSM digital servo system[J]. Machine Tool & Hydraulics, 2009, 58(1): 4-9.
[15] ף����. ����ֱ��ת�ؿ��Ƶĸ����ܴ����۲����ٶȹ۲�[J]. ��������ѧ��, 2004, 37(8): 209-213, 292.
ZHU Long-ji. High performance flux observer and speed observer of direct torque control[J]. Electric Machines and Control, 2004, 37(8): 209-213, 292.
�ո����ڣ�2009-01-25�������ڣ�2009-04-09
������Ŀ������ʡ�����������������������Ŀ(08B042)
ͨ�����ߣ�������(1972-)���У�������̶�ˣ������ڣ��������ء����Ϻ��Զ����Ƶ��о����绰��0731-88118922��E-mail: 774158154@qq.com
