
DOI: 10.11817/j.issn.1672-7207.2018.09.015
����SR300���������ɨ����Ƶ�ȥ�뷽��
�����������������ҽ���褣�������
(������ͨ��ѧ ��е����ѧԺ����е����ϵͳ���̹����ص�ʵ���ң����� ������710049)
ժ Ҫ��
����ɨ��ϵͳ�������·���ӡ��ɱ��ߵ�ȱ�㣬����SR300�������ȡ��ά������ƣ�������ɨ���������������⣬���������ڣ��ֲ�ȥ��������ϵͳ�������˷���������Ƽ�����˹�ϵ������ֱ�Ӷ���άɢ�ҵ��ƽ��д��������ȣ�������ɨ��ʵ��ƽ̨��ȡ������Ʋ�����Բ����ָ���е���Ԥ���������ţ������ʵ��2��������Ⱥ��ȥ����㷨����ͳ�Ʒ���������뾶��������2���㷨���ʹ��ȥ����ͬ���͵���Ⱥ�㣻������������ͼ��˫���˲�ȥ���㷨��Ȩ�����ӵ������ķ�Χ�ڣ��ֱ��Ե������ƺ�ȫ������Ϊ����ȥ��ʱ��ֱ��Ϊ��ͳ˫���˲���7.52%��3.69%������VS2010����������������PCL����д����㷨ʵ�顣�о�������������ķ����ܹ���Чȥ������������ܱ��ֱ�Ե��������ýϺõ���ά������ƽ����
�ؼ��ʣ�
SR300������ɨ��������ȥ�������ͼ��˫���˲���
��ͼ����ţ�TP391.4 ���ױ�־�룺A ���±�ţ�1672-7207(2018)09-2225-07
Denoising method of body scanning point cloud obtained by SR300
ZHANG Mingkai, LIANG Jin, LIU Liejin, LIANG Yu, WANG Xiaoguang
(State Key Laboratory for Manufacturing Systems Engineering, School of Mechanical Engineering,
Xi��an Jiaotong University, Xi��an 710049, China)
Abstract: In order to avoid the disadvantages of traditional 3D body scanning system such as large volume, complex circuit and high cost, SR300 was used to get 3D body point cloud. To deal with the problem of large noise in the scanning data, a step-by-step denoising method featuring outside-in was proposed. This method could deal with scattered 3D point cloud directly without the topological relation. Firstly, the somatosensory scanning platform was designed to get the human body point cloud and the point cloud preprocessing was carried out by using the cylinder segmentation method. Then, two algorithms named statistical analysis method and ball radius method were proposed and implemented to remove outliers of different types. Finally, bilateral filtering algorithm for human depth image was tested to make sure the weight factors were suitable. Taking the single point cloud and the whole body point cloud as examples, the denoising time was only 7.52% and 3.69% of the traditional bilateral filtering, respectively. A lot of algorithm experiments were taken by using the PCL library under the VS2010 development environment. The results show that the proposed method can effectively remove the internal and external noise with the edge feature maintained, and can get better 3D body cloud data.
Key words: SR300; body scanning; point cloud denoising; depth image; bilateral filtering
��������������м�����Ѹ�ٷ�չ��ʹ���������������ɨ��ļ������ڳ�Ϊ�ֽ���о��ȵ㡣Ŀǰ�����д���ѧ��ʹ������Kinect�����ɨ����ؽ���ά����ģ��[1-3]�����ɨ��㷺Ӧ�����˻�������������ʵ��3D��ӡ����������Ӣ�ҵ�[4]���������ɨ��ʶ����ȡ֫���˶���ʵ��������ٶ������Ϸ�еij���ʽ���飻������[5]����ɨ���ǻ�ȡ������ά����ģ�ͣ�����ʵ����ȡ����ߴ��Ŀ�ģ������ߵ�[6]���һ�ֻ�������ʶ����������н���������ʵ���������������Ȼ�������ơ���ͳ��������ά�ؽ��Dz��÷ǽӴ�ʽ��ά��ѧɨ������ʵ�ֵģ�Ϊ�˻�ýϺõ��������ģ�ͣ�����ʹ�ù�ҵ����;�ͷ���еĹ�դʽɨ��ϵͳ������ͶӰ����ɹ�դͶӰ������Щ�豸�۸���������߸��ӣ�����Я����ά������ͳɨ����ֻ��ɨ������ֲ���������ת̨�������Ϊɨ��ʱ�䳤�����������������������IJ���Ӣ�ض���˾2016����Ƴ���SR300���������Ч���������ȱ�㣬�佫�ڰ������Ͷ����������1��ģ���ϣ�ֻ��1��USB3.0������������������ݵ����ӣ�С���ֱ�Я���ɶ����������ص�ϵͳ�ɼ��������ȫ��ɨ�衣������������豸����������ṹ���ӵ����أ���ȡ���������������Ӱ�������ؽ�Ч������Ե��ƽ���ȥ�봦����1���õĵ���ȥ���㷨һ����߱�����4������[7]��1) ��Ч������ͼ���������ģ���еĸ�����ʽ��������2) ģ�ͱ����˳��ͬʱ���ֹ��е�ϸ����Ϣ��3) �ڴ��������з�ֹģ�����������Ť�����Σ�4) �ϵ͵�ʱ�临�ӶȺͿռ临�Ӷȡ����ԣ��о������Чȥ��������㲢��ø���������ά���������ǵ�ǰ�о����ѵ㡣���ɨ�������ֲ��в�ͬ���ɣ���ˬ��[8]��ɢ�ҵ�������Ϊ3�࣬ʵ���˻��������ĵ���ȥ�롣��ʵ��������Թ��Ϊ2�ࣺһ����������������㣬Ҳ����Ⱥ������㣻��һ������������ϵ���㣬��Щ���ʹ����ģ�ͱ�����ݺʹֲڡ�����ȥ�밴�Ⱥ�˳��Ҳ������ɢ�ҵ�ģ�͵�ȥ��͵�������(һ�������ǻ�)��ȥ�롣����������ȥ��Ŀǰ�ѻ�ù㷺�о���������»��[7]���������ݻ���Ϊ������Ϣ�ٵ�ƽ̹�����������Ϣ�ḻ�����ֱ���ò�ͬ�㷨ȥ�룬����˻���������Ϣ����ĵ���ȥ�롣�ձ�Ծ��[9]����K-means���෨�Ե��ƾ��࣬���ݵ㵽�������ľ�����ڽ������ʱ仯�ж���������ȥ�������ⲿ����ȡ��һ��Ч��������ȥ���㷨�������ӣ���ϸ��ַ������Ƶ�ȥ�뷽�����㷺ʹ�á���ZHAO��[10]��Ͼ�ֵ�˲�����ֵ�˲�����Ӧ���ڵ��Ƶ�ȥ��ƽ�����ܱ���һ����������TOMASI��[11]���������˫���˲��㷨��ʵ����ͼ��Ľ��룬���ܱ��ֱ�Եϸ���������������ƹ�Ӧ�õ�����ȥ���ϡ�ZAMAN��[12]��������Ⱥ�Ż�����ȷ�����ܶȴ������������÷�ֵ������ʹ�þ�ֵƯ�ƾ����㷨ȥ����Ⱥ�㣬�Ƴ���Ⱥ����ٲ���˫���˲�����ʣ����������ƽ������������Ⱥ�Ż�������ǿ�˺��ܶȹ��Ƶ�³���ԣ���ȥ����Ⱥ����ʵʩ����ƽ��ʹȥ��Ч�����������������������Ϣ�������Ʋ�ͬ����ģ�͵�ȥ����Խϸ��ӣ�ȥ���㷨Ҳ��Խ��١�����Ⱥ������ȥ��������ͳ��ѧ���Է�Ϊ3�ࣺ������ȵĵ���ȥ�뷨[13]�����ھ���ĵ���ȥ�뷨[14]�������ܶȵĵ���ȥ�뷨[15]�����⣬����һЩ�Ƚϳɹ��ĵ�ģ��ȥ�뷽���������ºϵ�[16]ͨ�������ķ���ʸ���ͷ���ֲ�������������йص�����Ӧ������������3���˲�ʵ��ɢ�ҵ��Ƶ�ȥ�룬����˹�˳����ɢ���档LIU��[17]����ϡ������ܼ��㣬���ڰ˲������ַ��Ա�ǵ��ܼ������Ԥ������������㷨Ч�ʣ���ȫ�ֵ���ȥ����ȣ�������ϸ�����������ַ�����ӱ��������չ�ԡ����ǵ�ɢ�ҵ��Ʊ��������������ɱ���ػ�Ӱ�쵽��ά�ؽ��ľ��ȣ���ˣ��Դ��������ĵ�ģ�ͽ�����Ⱥ��ȥ�룬�ٽ��б����˳ȥ���������塣�������SR300�����ɨ������������������������Ͳ�ͬ��һ��ȥ��������ȫȥ�����������⣬����������ڷֲ�ȥ��ķ�������ȥ�봦��������ʹ��Բ����ָ��ȡ������Χ�ڵĵ��ƣ��ٽ��ʹ��ͳ�Ʒ���������뾶��ȥ����Ⱥ�㣬������һ��������ͼ��˫���˲��㷨ʵ�ֱ�����ƵĹ�˳ȥ�롣��ȥ���㷨���д���ʵ�飬�ҵ�������Χ�ڵIJ��������̶ȵشﵽȥ���Ŀ�ġ����IJ���һ���µ��������������ɨ�裬�ɴﵽ�ͳɱ���ȡ������ά���Ƶ�Ŀ�ģ�ͬʱȥ���㷨Ҳ�ܽ����е�������������⣬Ϊ����������ά�ؽ��ṩ�ο���
1 ��ά������ƻ�ȡ��Ԥ����
����Ӣ�ض�SR300�������ȡ����������ݣ������Ҳ����������SR300����������⼤��Ͷ����������ڰ�����Ͳ�ɫ�����1����Ͷ�������ñ����������ɼ�ʱͶ������ɼ��ĸ��������ͼ��������Էֱ���Ϊ640���ء�480���أ�60֡/s���ٶȻ�ȡ����������ݡ���ɫ�����200�����ػ�ȡRGB����������ͼ��
1.1 ��ά������ƻ�ȡ
��Ƶ����ɨ��ϵͳ�ṹ��4���ּ�������ɣ�4��ɨ�������γɵ�ɨ���ܳ���������Ϊ1 600 mm�� 1 200 mm��1 600 mm(ʵ�ʸ߶�2 000 mm)��ÿ�������ϰ�װ4�����������16����ͬһ�����ϵ������֮��ľ���Ϊ400 mm��ɨ�����м�Ϊ�����������Ƶı궨�壬����ɨ��ǰ16�������������ı궨����Ϊ����궨ʱͶ�����ͼ�����ԣ�������Χ�������ƴ����в��⡣�궨�ɹ�����վ���ڿ�����룬������ɼ�ͼƬ��ϵͳͨ�������ںϺ���ȫ����ά������ơ�
1.2 ����Ԥ����
������ɨ���������������⣬ͨ���趨����������������Ʒ�Χ�����Գ�����ȡ�Ϻõĵ�������������������ڵĴ���ʱ�䡣��ͳ�ķ����Ƿֱ�����X��Y��Z���ȡֵ��Χ������������γ�1���������Ͱ�Χ�У�ɾ�����ں���ĵ��ƣ��������ڵ�������ơ���ζ�����[18]���ô˷�����ֲ����ά���������Ԥ��������һЩ��������£�Ϊ��ø��õľ���Ч���������߽ϰ����˽��µ�����ɨ�裬ɨ��ʱ��ѵ���͵������һ��ɨ�裬���ϱ����������ݣ�����ڴ�����㡣Ԥ������Ŀ�ľ���ȥ����Щ��㡣���IJ���Բ����ָ����Ԥ�������ָ��Բ�����ڵ��ƣ���Բ���������ɾ���������㷨����Ϊ��1) �ƶ�����ϵ������Ь����ƽ�漴˫�����м䣬����ֱͨ�˲�������Z���ϲ��ڶ������귶Χ�ڵĵ㣻2) �Թ��˵�ÿ������б��淨�߹��ƣ�3) ���ڷ��߹��Ʒָ��ȡƽ�����ģ�ͣ�4) ����Բ����ģ�Ͱ뾶���ָ��Բ�������ģ�͡�
2 �������ȥ�봦��
����Ԥ����֮���������ƣ���Բ����������Χ�ڱ����ĵ��ƣ�����������ƺ�������Ⱥ�㡣����������Ⱥ�㣬��Ҫ��ƫ������������ϡ���͵����µ㡣������2��������Ⱥ�㣬�ֱ����ͳ�Ʒ���������뾶��ȥ�������������ͼ��˫���˲��㷨�������������ƹ�˳ȥ�룬�ڻ�ȡ���Ʊ����˳��ͬʱ����ϸ��������
2.1 ͳ�Ʒ�����ȥ��
��������ƽ��в��ֲ�������������һ������ڵ�ľ��룬ͳ�Ƶó��������ƽ��ֵD������ƽ��ֵԽ����ԽԶ�ĵ����μ��٣���ˣ����ڵ��ƾ���ֲ����о����ԡ��Գ��ԡ����ȱ䶯�ԣ����Ʒ�����̬�ֲ������ڵ��ƾ���������Ĺ�ϵ��ͼ1��ʾ��
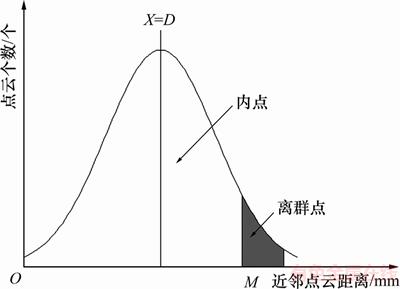
ͼ1 ���ڵ��ƾ�������ܶ�ͼ
Fig. 1 Probability density of nearest neighbor distance
ͳ�Ʒ�����������1�����뷧ֵM�����ڷ�ֵ�ĵ�����㣬Ҳ����Ⱥ�㣬��Ҫȥ���ĵ��ƣ�С�ڷ�ֵ�ĵ������ڵ㣬Ҫ�����������㷨ԭ��Ϊ���������ܵ��Ƹ���ΪN��������ƺ����P0������k������P0��k�����ڵ�ľ���d������ƽ��ֵ���õ��õ�����ֵ��Ȼ�������1����ľ����ֵ��ֱ��N���������ϣ�����N��������ֵ��ƽ��ֵ����ȫ�־����ֵD������������� �������þ��뷧ֵM���������е㣬�Ƚϵ�������ֵdi�;��뷧ֵM����������ֵ���ڷ�ֵ��Ϊ��Ⱥ�㣬��֮Ϊ�ڵ㡣������㲽��Ϊ����ij����ΪP0(X0, Y0, Z0)������ڵ�ΪP1��P2������Pk��kΪ���ڵ�ĸ��������ڵ�i���㣬������ΪPi(Xi, Yi, Zi)����P0�����ڽ���Pi�ľ���Ϊ
�������þ��뷧ֵM���������е㣬�Ƚϵ�������ֵdi�;��뷧ֵM����������ֵ���ڷ�ֵ��Ϊ��Ⱥ�㣬��֮Ϊ�ڵ㡣������㲽��Ϊ����ij����ΪP0(X0, Y0, Z0)������ڵ�ΪP1��P2������Pk��kΪ���ڵ�ĸ��������ڵ�i���㣬������ΪPi(Xi, Yi, Zi)����P0�����ڽ���Pi�ľ���Ϊ
 (1)
(1)
����P0�ľ����ֵ Ϊ
Ϊ
 (2)
(2)
�ظ��������̣���������������ƣ��������е�ĵ�������ֵdi�����ȫ�־����ֵΪ
 (3)
(3)
�����Ϊ
 (4)
(4)
���õ����뷧ֵΪ
 (5)
(5)
ʽ�У� Ϊ���뷧ֵϵ�������㷨ʵ��õ����������е㣬�Ƚϵ����ֵ�;��뷧ֵ����di��M���������ֵ���ھ��뷧ֵ����õ���Ϊ��㼴��Ⱥ�㣬ɾ���˵㣻��֮Ϊ�ڵ㣬���Ա�����
Ϊ���뷧ֵϵ�������㷨ʵ��õ����������е㣬�Ƚϵ����ֵ�;��뷧ֵ����di��M���������ֵ���ھ��뷧ֵ����õ���Ϊ��㼴��Ⱥ�㣬ɾ���˵㣻��֮Ϊ�ڵ㣬���Ա�����
2.2 ��뾶��ȥ��
��ͳ�Ʒ��������������ھ����ж���Ⱥ�㲻ͬ����뾶����һ��ͨ���ж�ij�������������Ƿ����������������õ�ɾ�����ķ�������ij��ΪPi����������뾶ΪR�����������N����Pi����뾶R�����������õ��ĵ���С��N����ɾ��Pi�㣬������������N�����ڵĵ���������������������ƣ�ͨ���˲����ж�ÿ�����ȥ������ͼ2��ʾ��
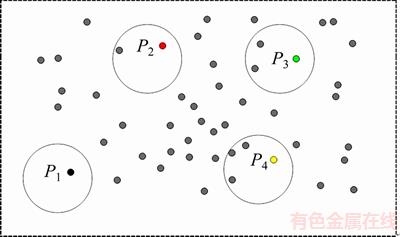
ͼ2 ��뾶��ʾ��ͼ
Fig. 2 Schematic diagram of radius outlier removal
����ú��ʰ뾶R��ȡ��ͬ������N��ȥ������ͬ��
1) ��N=1����ɾ��P1(P1������Ϊ0������������1�����ڵ�)��P2������P3��P4��
2) ��N=2����ɾ��P1��P2(P2������Ϊ1��P1��P2��û����������2�����ڵ�)������P3��P4��
3) ��N=3����ɾ��P1��P2��P3(P3������Ϊ2��û����������3�����ڵ�)������P4��
2.3 ˫���˲���ȥ��
˫���˲���һ�ֱ�����ƹ�˳ȥ�뷽�������ľ����Ľ��˷��������÷����ɹ���Ӧ�������ɨ��������Ƶ�ȥ�롣˫���˲����ڸ�˹�˲�������������1����˹�����ȥ��������ܱ��ָ�Ƶϸ�ڣ�����˹�˲�������Ե�ģ����Ե��˫���˲��ǽ����ͼ��Ŀռ��ڽ��Ⱥ����ص��˲���������ͬʱ�����˿ռ����Ȩ�غ͵�������Ȩ�أ����ﵽ�˲�Ч�������㷨˼����Լ���1����ʽ��ʾ���ռ亯������ֵ������������������ء�
������㲽�����¡�
1) �������Ȩ�ء������ͼ�ϵ�A�������������Ϊ��������ѡȡ1������Χ ��������Χ������A��ΪԲ�ġ�RΪ�뾶��Բ���塣����BΪ������Χ�ڵ�1�㣬������뷽��
��������Χ������A��ΪԲ�ġ�RΪ�뾶��Բ���塣����BΪ������Χ�ڵ�1�㣬������뷽�� ��ֵ��
��ֵ�� ����ɼ���A��B��2��ľ���Ȩ��
����ɼ���A��B��2��ľ���Ȩ�� Ϊ
Ϊ
 (6)
(6)
ʽ�У�(i, j)��(k, l)�ֱ�ΪA���B������ꡣ
2) A��B 2���ֵ��Ȩ�� Ϊ
Ϊ
 (7)
(7)
ʽ�У� ��
�� �ֱ�ΪA���B������أ�Ϊֵ�
�ֱ�ΪA���B������أ�Ϊֵ�
3) A�����ȿ���A�����������еĵ����ȼ�Ȩƽ���õ���
 (8)
(8)
 (9)
(9)
ʽ�У� ΪA�������ڵĵ�B��Ȩ�أ����ɾ���Ȩ�غ�����ֵ��Ȩ�غ����ij˻��õ���
ΪA�������ڵĵ�B��Ȩ�أ����ɾ���Ȩ�غ�����ֵ��Ȩ�غ����ij˻��õ��� Ϊ����A���˫���˲������ȡ�
Ϊ����A���˫���˲������ȡ�
��ʽ(7)��֪����(i, j)�͵�(k, l)����Խ�ӽ���Ȩֵ����wԽ�ӽ���˹�˲����������ԣ�˫���˲���������һ�ָĽ��ĸ�˹�˲���������ʱ��Խ��ͬ���ز��Ӧ��Ȩֵ������Խ����ʧȥ���������ز����Ե��Ϣ��Ч����˫���˲��˻�Ϊ��˹�˲�������С����Ȩֵ����w�����ز�����У�ʧȥ���˲�Ч�������Ա����˱�Ե��Ϣ�����ۺϷ�������˹�˲��ǽ�����̣���˫���˲�ͨ�����������������Ե��Ϣ��
3 ȥ���㷨ʵ����������
3.1 ����Ԥ������������
����Բ����ָ���Ʒ�����ȥ��SR300�������ȡ�ı����������ݵ��ơ�������Z (0,1.9) m����ȷ��Z��Χ���ƣ�����Բ����뾶R��0.9 m�����г�������ɾ���ĵ��ƺ�ȥ���ĵ��ƣ��ڵ���������ͬʱ��ʾЧ������ͼ3(a)��ʾ(ȥ���ĵ�����ȥ���ĵ�����2����ɫ����)��Ԥ������������ƽ����ͼ3(b)��ʾ�����У�ԭʼ������Ϊ431 015����Ԥ��������Ƽ��ٵ�292 254����ͨ������ͳ�ƿ�֪�����ɨ��Ԥ������ʮ�ֱ�Ҫ�ģ��ɼ������������
(0,1.9) m����ȷ��Z��Χ���ƣ�����Բ����뾶R��0.9 m�����г�������ɾ���ĵ��ƺ�ȥ���ĵ��ƣ��ڵ���������ͬʱ��ʾЧ������ͼ3(a)��ʾ(ȥ���ĵ�����ȥ���ĵ�����2����ɫ����)��Ԥ������������ƽ����ͼ3(b)��ʾ�����У�ԭʼ������Ϊ431 015����Ԥ��������Ƽ��ٵ�292 254����ͨ������ͳ�ƿ�֪�����ɨ��Ԥ������ʮ�ֱ�Ҫ�ģ��ɼ������������
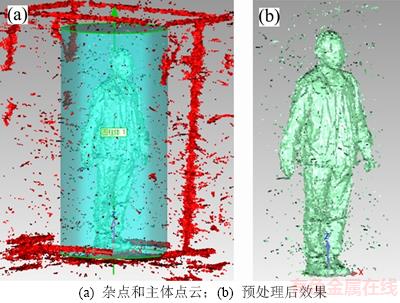
ͼ3 ԭʼ����Ԥ����Ч��
Fig. 3 Preprocessing effects of original point cloud
3.2 ͳ�Ʒ�����ʵ����������
ͨ������Ԥ�������ٲ���ͳ�Ʒ���������Ⱥ�����ȥ�������岻ͬ������k�;��뷧ֵϵ�������㷨ʵ�飬���Եõ���ͬȥ��Ч����ͳ�ƽ����ͼ4��ʾ��
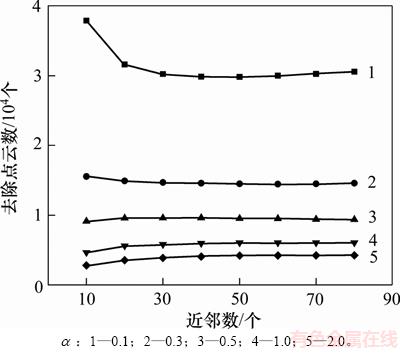
ͼ4 ͳ�Ʒ�����ʵ������
Fig. 4 Experimental data of statistical analysis method
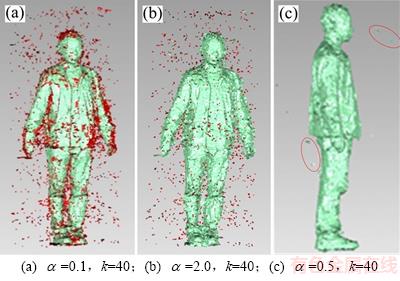
��ͼ4��֪����ȥ��Ӱ��dz��������ϣ�ԽС��ȥ���ĵ�����Խ�࣬��kΪ10~20ʱȥ��������������kΪ30~80ʱȥ������������ƽ����ͨ��������֪�ý������ͳ�Ʒ���˼�룬����Խ�٣������ƽ�����벨��Խ�����ԣ�ȥ������������������Խ�࣬ƽ����������ijһ������ȥ��������С���仯������ȥ��Ч����ͼ5��ʾ��
ͼ5(a)��ͼ5(b)��ʾ�ֱ�Ϊȥ�����ƺ�ȥ���ĵ���ͬʱ��ʾ��Ч����������ɫ����Ϊȥ���ĵ��ƣ����У�ͼ5(a)������̫С��ȥ����ȣ���ͼ5(b)��̫��ȥ�벻���ף�ͼ5(c)��ʾ���Ǻ��ʵ���k����ȥ����Ч�����Ӳ��濴���Է��ֻ���СƬ��Ⱥ��û����ȫȥ����
ͼ5 ͳ�Ʒ�����ȥ��Ч��
Fig. 5 Denoising effects using statistical analysis method
3.3 ��뾶��ʵ����������
ʹ��ͳ�Ʒ�����ȥ���������ȥ������Ⱥ�㣬���Ų�����뾶��ȥ��ʣ��С������Ⱥ�㡣����뾶��ȥ��ʵ���У�������뾶Ϊ30 mm��ԭʼ������Ϊ282 652����ͨ��ѡȡ��ͬ�Ľ����������㷨ʵ�����ý�����1��ʾ��
��1 ��ͬ����ȥ������
Table 1 Denoising data of different parameters

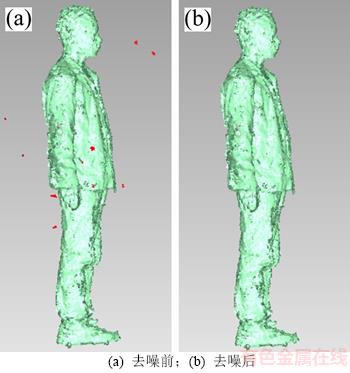
�ɱ�1��֪������ͬһ��뾶��������Խ�࣬ȥ���ĵ�����Խ�࣬���㷨ʱ��������䣬���ԣ��㷨ʱ����Ҫ��뾶��ء�������ȡ��̫�٣�ȥ�벻���ף�ȡ��̫��������ȥ�롣���뾶Ϊ30 mm��������Ϊ50��ʱ��ȥ��Ч����ã���ͼ6��ʾ��
ͼ6 ��뾶��ȥ��Ч��
Fig. 6 Denoising effect of ball radius method
3.4 ˫���˲��㷨ʵ��
��ͳ��˫���˲���Ե������ݽ���������Ϻͷ�����Ƶȸ��Ӽ��㣬Ϊ����˲�Ч�ʣ�����ֱ�ӽ�SR300��ȡ���������ת��Ϊ�Ҷ�ͼ��Ȼ��ԻҶ�ͼ�����˫���˲�ȥ�롣Ϊ���õ���ʾ����˫���˲�Ч�������оֲ�����ɨ��ȥ��ʵ�顣ʵ���У�������ΧΪ11���ء�11���أ�ѡȡ ��
�� ��Ϊ��õ��˲��������ֱ�������ʯ��ͷ�������ģ��ͷ��ɨ��Ϊ������������˫���˲������ý����ͼ7��ʾ��
��Ϊ��õ��˲��������ֱ�������ʯ��ͷ�������ģ��ͷ��ɨ��Ϊ������������˫���˲������ý����ͼ7��ʾ��
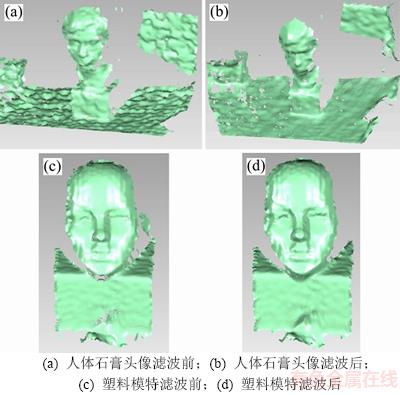
��ʯ�౾���ֲڣ����ԣ�ɨ��Ч����Դֲڣ��˲���Ч�����������ϱ�����Թ⻬���˲����ܱ���ϸ��������Ϊ��֤�����㷨��Ч�ʣ���ģ��ͷ�����뾶ȥ���ȫ���������Ϊ����ģ��ԭʼ������Ϊ44 986����ȫ�����������Ϊ282 637�������д�ͳ˫���˲��ͱ���˫���˲���ͳ�ƽ�����2��ʾ��
ͼ7 ˫���˲�Ч��
Fig. 7 Result of bilateral filtering
��2 ��ͬ�㷨ȥ����
Table 2 Denoising results of different algorithms
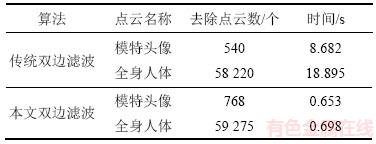
�ӱ�2��֪����������������������ͬ���������ͳ˫���˲�����ȥ��ʱ�������������������ȣ���ʹ�ñ���˫���˲��㷨�Բ�ͬ������ȥ��ʱ��仯����ģ��ͷ���ȫ����������˲�ʱ��ֱ�Ϊ��ͳ˫���˲���7.52%��3.69%��Ч��������ߣ����ܱ���ϸ��������
3.5 ȥ���㷨�Աȷ���
����Բ����ָ���е���Ԥ����ȥ�����ָ��ӱ������������ɨ�����ȥ��ı�Ҫһ������ʵ���Ǹ����û�������ص��������ָ��Բ�����ڵ������ݣ�ȥ��������Ҫ��ϵͳ����������ȷ��������Ƶķ�Χ��ͳ�Ʒ���������뾶������ȥ����Ⱥ��ķ���������ɢ�ҵ�û����Ӧ�����˹�ϵ�����ԣ����ǵĹ�ͬ�㶼�����ݽ��ڹ�ϵ����ȥ�����ӡ�����ͬ���ǣ�ͳ�Ʒ��������ݽ���ƽ��������ȥ����Ⱥ�㣬��뾶���������뾶��Χ�ڽ�����ȥ����Ⱥ�㡣����ȥ����������ͳ�Ʒ������ʺ�ȥ��ϡ����ƣ���뾶���ر��ʺ�ȥ��СƬ�ۼ����ƻ������㣬�����߽�ϻ���������Чȥ�����е���Ⱥ�㡣������ͼ��˫���˲���˳ȥ�뷨�Ƕ����������Ƶ�ƽ���������õ�����ʵ������ģ�͡�����û�и��ӵ��������˹�ϵ��ɢ�ҵ�ģ��ȥ�����������ȥ��Ч�ʸߣ�ͬʱҲ�ܱ�����Ӧ�������ۺ�����ϵͳ��ȥ�뷽������ʵ���������ɨ����ƴ�����ȥ����Ŀ�ꡣ
4 ����
1) ��Ƶ��������ɨ��ʵ��ƽ̨�ܻ�ȡȫ����ά����������ݣ���ɨ��Ч���ϴֲڣ������������ɨ��ϵͳ�д��Ľ���
2) ����Բ����ָ��Ԥ��������ȥ���˴������������������ָ��Բ����������ơ����ͳ�Ʒ���������뾶��ȥ����ͬ������Ⱥ�㡣��ͳ�Ʒ������У���̫С����ȥ����ȣ���̫����ȥ�벻���ס�����뾶���У���뾶������ȥ��ʱ�䣬��RΪ30 mm��NΪ50ʱ��ȥ��Ч����ѡ�
3) �������������ݵ�˫���˲�ȥ���㷨�ȴ�ͳ˫���˲���ȥ��Ч�ʸߣ���ģ��ͷ���ȫ����������˲�ʱ��ֱ��Ǵ�ͳ˫���˲���7.52%��3.69%�����ܵ��Ʊ����˳�����ܱ�֤ϸ��������
�ο����ף�
[1] ����, Ѧԭ, �����, ��. ����Kinect������ʵʱ��ά�ؽ�����Ӧ��[J]. ��������������ͼ��ѧѧ��, 2014, 26(10): 1720-1726.
MA Xuan, XUE Yuan, YANG Ruoyu, et al. Kinect-based real time 3D reconstruction from Kinect[J]. Journal of Computer- aided Design &Computer Graphies, 2014, 26(10): 1720-1726.
[2] ���, �˽���, ͯ��, ��. ʹ��Kinect�����ؽ���ά����[J]. ��������������ͼ��ѧѧ��, 2013, 25(6): 873-879.
ZHOU Jin, PAN Jianjiang, TONG Jing, et al. Fast 3D human body reconstruction from Kinect[J]. Journal of Computer-aided Design & Computer Graphies, 2013, 25(6): 873-879.
[3] ��˼��, ��־ȫ, ����, ��. ��������Kinect �ĸ��Ի������ؽ�[J]. ϵͳ����ѧ��, 2013, 25(10): 2408-2411.
QIAO Sihang, CHENG Zhiquan, CHEN Yin, et al. Personalized full-body reconstruction using three Kinect[J]. Journal of System Simulation, 2013, 25(10): 2408-2411.
[4] ��Ӣ��, ����, ����ǿ. ������Ƶ���ٵ������Ϸ���[J]. �����������Ӧ��, 2015, 51(17): 44-47.
ZHANG Yinglie, XIA Meng, CHEN Linqiang. Design of somatosensory games based on video tracking[J]. Computer Engineering and Applications, 2015, 51(17): 44-47.
[5] ����, ����, ��ȫ, ��. ���ڵ���ģ�͵�����ߴ��Զ���ȡ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(8): 2676-2683.
LAI Jun, WANG Bo, FU Quan, et al. Automatic extraction method of human body sizes based on 3D point clouds[J]. Journal of Central South University(Science and Technology), 2014, 45(8): 2676-2683.
[6] ������, �Ž���, �����. ��������ʶ����������н�������[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2015, 43(S1): 136-139, 165.
CAI Linqin, ZHANG Jianrong, LIU Binbin. Somatosensory interaction with virtual environments based on gesture recognition[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2015, 43(S1): 136-139, 165.
[7] ����», ʷ���, �»�ΰ. ����������Ϣ�������ά������ȥ��[J]. ��ѧ���ܹ���, 2016, 24(6): 1465-1473.
WU Shenlu, SHI Haoliang, CHEN Huawei. Denoising of three dimensional point data based on classification of feature information[J]. Optics Precision Engineering, 2016, 24(6): 1465-1473.
[8] ��ˬ, ����ƽ, ����. ��������ѡ���˫���˲�����ȥ���㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 43(2): 351-354.
CAO Shuang, YUE Jianping, MA Wen. Bilateral filtering denoise algorithm for point cloud based on feature selection[J]. Journal of Southeast University(Natural Science Edition), 2013, 43(2): 351-354.
[9] �ձ�Ծ, ������, ������, ��. ����K-means �����RGBD����ȥ��;����㷨[J]. ϵͳ����ѧ��, 2016, 28(10): 2329-2334.
SU Benyue, MA Jinyu, PENG Yusheng, et al. Algorithm for RGBD point cloud denoising and simplification based on K-means clustering[J]. Journal of System Simulation, 2016, 28(10): 2329-2334.
[10] ZHAO Ping, BAI Xuewei, LI Yongkui, et al. A new method of data smoothing for scan-line point cloud in reverse engineering[J]. Advanced Materials Research, 2014, 1006/1007: 352-355.
[11] TOMASI C, MANDUCHI R. Bilateral filtering for gray and color images[C]// Proceedings of the IEEE International Conference on Computer Vision. Bombay, India: IEEE, 1998: 839-846.
[12] ZAMAN F, WONG Y P, NG B Y. Density-based denoising of point cloud[C]// Lecture Notes in Electrical Engineering. Penang, Malaysia: Springer Verlag, 2017: 287-295.
[13] LI Jia, LIN Huan, LAN Qiuping, et al. Algorithm of recognizing and correcting the outlier based on depth difference[J]. Engineering of Surveying and Mapping, 2014, 23(11): 1-6.
[14] JIANG Feng, DU Junwei, SUI Yuefei, et al. Outlier detection based on boundary and distance[J]. Acta Electronica Sinica, 2010, 38(3): 700-705.
[15] ��ʿ��, ������, ���Ƕ�. �Ľ��ĺ��ܶȵ���ȥ���㷨���о���ʵ��[J]. ��������������, 2015, 36(5): 1285-1289.
LIANG Shichao, HAN Yongguo, WU Yadong. Research and implementation of improved kernel-density denoising algorithm based on point cloud[J]. Computer and Engineering and Design, 2015, 36(5): 1285-1289.
[16] ���º�, ����, ����, ��. ��������Ӧ���������ɢ�ҵ��ƽ��뼼���о�[J]. �й���е����, 2010, 21(6): 639-643.
LIANG Xinhe, LIANG Jin, GUO Cheng, et al. Study on scatter point cloud denoising technology based on self-adaptive optimal neighborhood[J]. China Mechanical Engineering, 2010, 21(6): 639-643.
[17] LIU Chang, YUAN Ding, ZHAO Hongwei. 3D point cloud denoising and normal estimation for 3D surface reconstruction[C]// International Conference on Robotics and Biomimetics. Zhuhai, China: IEEE, 2015: 820-825.
[18] �ζ���, ��С��, ����, ��. Kinect ��ȡֲ����ά�������ݵ�ȥ�뷽��[J]. ũҵ��еѧ��, 2016, 46(1): 331-336.
HE Dongjian, SHAO Xiaoning, WANG Dan, et al. Denoising method of 3-D point cloud date of plants obtained by Kinect[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 46(1): 331-336.
(�༭ ����ΰ)
�ո����ڣ�2017-09-06�������ڣ�2017-10-28
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675404��51421004) (Projects(51675404, 51421004) supported by the National Natural Science Foundation of China)
ͨ�����ߣ���������ʿ�����ڣ���ʿ����ʦ�����»�����ơ������Ӿ����о���E-mail: liangjin@mail.xjtu.edu.cn
ժҪ��Ϊ�˷���ͳ��ά����ɨ��ϵͳ�������·���ӡ��ɱ��ߵ�ȱ�㣬����SR300�������ȡ��ά������ƣ�������ɨ���������������⣬���������ڣ��ֲ�ȥ��������ϵͳ�������˷���������Ƽ�����˹�ϵ������ֱ�Ӷ���άɢ�ҵ��ƽ��д��������ȣ�������ɨ��ʵ��ƽ̨��ȡ������Ʋ�����Բ����ָ���е���Ԥ���������ţ������ʵ��2��������Ⱥ��ȥ����㷨����ͳ�Ʒ���������뾶��������2���㷨���ʹ��ȥ����ͬ���͵���Ⱥ�㣻������������ͼ��˫���˲�ȥ���㷨��Ȩ�����ӵ������ķ�Χ�ڣ��ֱ��Ե������ƺ�ȫ������Ϊ����ȥ��ʱ��ֱ��Ϊ��ͳ˫���˲���7.52%��3.69%������VS2010����������������PCL����д����㷨ʵ�顣�о�������������ķ����ܹ���Чȥ������������ܱ��ֱ�Ե��������ýϺõ���ά������ƽ����
[2] ���, �˽���, ͯ��, ��. ʹ��Kinect�����ؽ���ά����[J]. ��������������ͼ��ѧѧ��, 2013, 25(6): 873-879.
[3] ��˼��, ��־ȫ, ����, ��. ��������Kinect �ĸ��Ի������ؽ�[J]. ϵͳ����ѧ��, 2013, 25(10): 2408-2411.
[4] ��Ӣ��, ����, ����ǿ. ������Ƶ���ٵ������Ϸ���[J]. �����������Ӧ��, 2015, 51(17): 44-47.
[7] ����», ʷ���, �»�ΰ. ����������Ϣ�������ά������ȥ��[J]. ��ѧ���ܹ���, 2016, 24(6): 1465-1473.
[8] ��ˬ, ����ƽ, ����. ��������ѡ���˫���˲�����ȥ���㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 43(2): 351-354.
[15] ��ʿ��, ������, ���Ƕ�. �Ľ��ĺ��ܶȵ���ȥ���㷨���о���ʵ��[J]. ��������������, 2015, 36(5): 1285-1289.
[16] ���º�, ����, ����, ��. ��������Ӧ���������ɢ�ҵ��ƽ��뼼���о�[J]. �й���е����, 2010, 21(6): 639-643.
[18] �ζ���, ��С��, ����, ��. Kinect ��ȡֲ����ά�������ݵ�ȥ�뷽��[J]. ũҵ��еѧ��, 2016, 46(1): 331-336.
