
������Ϣ�ںϼ����Ĵ���ˮ�ַ�����������
�ؽ������ԡ���
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ��Ҫ��Ϊ���ܹ��Ӷ�淴ӳˮ�ַ������ϵͳ״̬��ʵ�ֶ�ˮ�ַ���������ģʽ���Զ�ʶ����ȷ��ϣ�����Ϣ�ںϼ���Ӧ����ˮ�ַ������������ϵͳ�����ݹ��������������Ͻ��з��ദ�������ö��������BP�����������ˮ�ַ��������ϵľֲ���ϣ���ñ˴˶�����֤�ݣ�������D-S֤�������ں��㷨�Ը�֤�ݽ����ںϣ�����ʵ�ֶ�ˮ�ַ��������ϵ�ȷ��ϡ���ϲ���ʵ��֤�������ø����ϵͳ����Ч�������Ͽ��Ŷȣ�������ϵIJ�ȷ���ԡ�
�ؼ��ʣ�
ˮ�ַ�����������������Ϣ�ں���֤����������������
��ͼ����ţ�V263.6 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2007)02-0333-06
Hydroelectric generating sets fault diagnosis based on
information fusion technology
HE Jian-jun, ZHAO Rui
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract��Hydroelectric generating sets(HGS) information fusion diagnosis system was built for reflecting the HGS system state in multi-aspects, realizing automatical identification of HGS fault patterns and accurately diagnosing the faults. After fault feature data were classified and processed, several shunt-wound BP networks were used to carry on local HGS fault diagnosis and acquire independent evidences each other. Then D-S evidence theory fusion algorithms were used to fuse evidences. Accurate HGS fault diagnosis was fulfilled finally��The diagnostic tests prove that the system is good to improve the reliability of the diagnosis and decrease the uncertainty markedly.
Key words��hydroelectric generating sets; fault diagnosis; information fusion; evidence theory; neural network
1 ��Ϣ�ںϼ���
��Ϣ�ںϼ���[1-3]�����ü����������ʱ���õĴ������۲���Ϣ��һ�����¼����Զ��������Ż��ۺ����������ľ��ߺ�����������е���Ϣ�������̡���Ϣ�ںϵ�Ӳ�������Ƕഫ�������ӹ������Ƕ�Դ��Ϣ����Ϣ�ںϵĺ�����Э���Ż����ۺϴ�������Ϣ�ںϵĹ��̰����ഫ�������Ŀ��(��Ϣ�ɼ�)����Ϣ��������ϢԤ��������Ϣ�ں�����(������ȡ�����ʶ��)���������Ȼ��ڡ��ں�һ������ݼ��ںϡ��������ںϡ������ں�[4]3������������⡣����Ϣ�ںϵĹ����ǶԶ�Դ��Ϣ�����Ĺ��̣�ͨ����Ϣ����Ķ�̬���̣�ʹ��Ϣ��������ʹ������Ϣ�����������һ������Ĺ��̣������ںϵ���Ϣ���������ԡ������ԡ��ɿ��ԡ�ʵʱ�ԡ��ͳɱ��ԡ���Ϣ�ںϼ������ǵ�һѧ�Ƶļ������������뵱�������µ��о���������棬���㼯����Щ��������о��ɹ�����Ϣ�ںϼ����������Ϣ�������Ρ����ֶε��ŵ����ص㣬Խ��Խ��Ϊ��Ϣ����������������ߣ�Ŀǰ�����Զ�Ŀ��ʶ��[5-6]��ͼ����[7-8]���������[9-10]����������ù㷺Ӧ�á���һ�����ڸ������õ����ձ����ӣ��ҹ�����Ϣ�ں��������Σ����õ��㷺�����ӣ�����һЩ����ȡ����ʵ�ʳɹ���
2 ������Ϣ�ںϵ�ˮ�ַ�����������
ˮ�ַ������Ĺ��������Ӷ��������Ҿ��н���Ͳ������ԣ�����ijһ������й�����ϲ��걸������Ҳ��ȷ���ڴˣ���������������ഫ������Ϣ�ںϼ���Ӧ����ˮ�ַ�����������ϵͳ��������ô�������Դ����߹�����Ͼ��ȡ�������Ͻ�������Ŷȡ�
��Ϣ�ںϼ���Ӧ����ˮ�ַ�����������ϵͳ�ܹ���Ч�Ľ��й��ϵĶ�λʶ����һ���ϵͳ�������¼������ڣ�
a. �źż�⡣���ö����ͬ���ʹ������ɼ��ܷ�ӳˮ�ַ�����豸����״̬�ĸ�����Ϣ��
b. �źŷ���������FFT�任�Լ����źŽ��з���������
c. ������ȡ������Ӧ�û���Karhunen-loeveչ��ʽ��������ȡ���Դ�������Ϣ��������ѹ�����Դﵽ���������ռ�ά����Ŀ�ġ�����ȡ��ˮ�ַ�������豸״̬�йص�������
d. �ֲ�������ϡ����ö��������BP���������ˮ�ַ�����鲻ͬ�����Ͻ��г�����ϣ���ñ˴˶�����֤�ݡ�
e. ���߹�����ϡ�����D-S֤�����۶Թ�һ����������������������ںϴ������õ����յ���Ͻ�������ϵͳ��ͼ��ͼ1��ʾ��
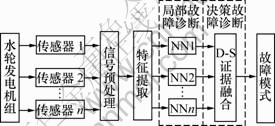
ͼ1 ˮ�ַ��������Ϣ�ںϹ������ϵͳ
Fig.1 HGS information fusion diagnosis system
2.1 ���ںϹ������
����������ͨ�����ڶ��������������ѧϰ�����Լ�ס��Щ���ϵ����ԡ���ˣ��������������ʵ�ֶ��ڶ�����ϵ���ϡ�������һ����ȱ��[11]�����豸��������������϶�ʱ,��Ȼ�������ṹ�����Ӵ�ʹ������ѵ��ʱ�䳤��������ѵ����ͬʱ���������ѧϰ���������ì�ܵĿ�������֮���ӣ��Ӷ�ʹ����ķ��������ϲȷ�Ƚ��ͣ�����Ӱ����ϵĿɿ��ԣ������¹���,������������������������������ѵ����
��������Ϣ�ںϹ������ϵͳ�ǰ������������������ռ���Ͽռ仮�ֳ����ɸ����������ӿռ�����ӿռ䣬���ÿһ�����������ӿռ�����ӿռ佨��һ����������ʵ�����������ӿռ䵽�����ӿռ��ӳ�䣬���������������й�����ϵ����⣬������������Ӳ�ͬ���淴ӳ����豸���ϣ���Ч�����ȷ���ʡ�
BP��������Ӧ����㷺��һ�������緽��������Ӧ�ö������BP�������繹��ֲ���Ϣ�ں����Ķ�ˮ�ַ�������Ͻ��оֲ�������ϡ��������罨����ԭ��Ϊ[12]��
a. ������������Ӧ����С��
b. ����������������Ӧ����С�����ò�ͬ���͵��ź���Ϊ��ͬ������������룬�����������ڱ�֤��ͬ���������IJ�����ԣ����ܿ��ǵ��豸��ϵ�ʵ������Ӳ�ͬ������豸���Ͻ�������о���
2.1.1 BP�������罨��
���۷���������������е������BP��������ӳ��һ��������������Ȼ���Ӳ������Խ�������ѵ������߾��ȣ�����Ҳʹ����ṹ���ӻ���ѵ��ʱ���ӳ���һ���ͨ����������ڵ���������羫�ȣ���ѵ��Ч�����������Ӳ��������ԡ����IJ�������㣬������������ĵ����������ṹ���ṹͼ��ͼ2��ʾ��
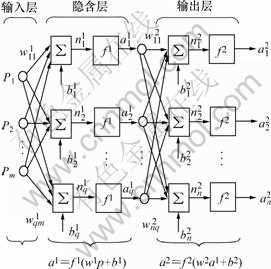
ͼ2 BP������ṹʾ��ͼ
Fig.2 Schematic diagram of BP net structure
a. �������롣�������뵽��������������������岻ͬ����ֵ��СҲ��ͬ��Ϊ�������������ٵĸ��ţ��������������뵽����֮ǰҪ���й�һ��������ʹ������[0,1]֮�䡣��������������������������Ķ��ٸ���ȷ��������ڵ�ĸ�����
b. ����ڵ��ѡ��������ڵ��ȷ����������ľ�ȷ�Էdz���Ҫ��ѡ�������Ƿ�Ǻϻ���Ǻ��������̶��Ĺ�ʽ���ڼ���������ڵ�����һ����ͬһ��������ѵ�����磬���ϸı�������ڵ���ֱ������Ȩֵ���ٷ����ı�Ϊֹ��������С�������ԭ��ѡ��ڵ���[13]��
c. ����ѵ�����������IJ��ô�������ѧϰ������ѵ��BP�����磬���ô�������ѧϰ�����ʹѵ���ٶȼӿ졣
d. ��Ԫ���ݺ�������Ԫ���ݺ����ܹ�ʹ����������ӳ��Ϊ���������ֱ��Ӱ�����紦���������������������ڵ������ڵ�����ö���S�ʹ��ݺ���LOGSIG��
2.2 ��D-S֤���ں���Ͼ���
2.2.1 ֤�����ۻ�������
֤�������ֳ�ΪDempster-Shafer���ۻ����κ������ۡ���֤�������У�һ�������ռ䱻��Ϊһ��ʶ���ܣ���Ϊ![]() ��
��
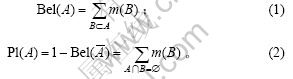
����[14]���躯��m����![]() ��������
��������![]() ����m��Ϊʶ����
����m��Ϊʶ���� �ϻ������Ŷȷ��䣬��ʾ��A�ľ�ȷ���Ρ�
�ϻ������Ŷȷ��䣬��ʾ��A�ľ�ȷ���Ρ�
��������κ���BelҲ��Ϊ����������ʾ��A��ȫ�����Ρ���Ȼ����PlҲ��Ϊ����������ʾ��A�Ǽٵ����γ̶ȡ�
2.2.2 D-S�ϳɷ���
D-S�ϳɷ�����һ����ӳ֤���������õķ���������ͬһʶ�����ϵĻ��ڲ�֤ͬ�ݵ��ŶȺ���������⼸��֤�ݲ�����ȫ��ͻ�ģ���ô�Ϳ������øúϳɷ�������һ���ŶȺ�����������ŶȺ����Ϳ�����Ϊ�Ǽ���֤�����������²������ŶȺ�����
a. 2���ŶȺ�������Ϲ���
����[15]����Bel1��Bel2��ͬһʶ����![]() �ϵ������ŶȺ�����m1��m2�ֱ������Ӧ�Ļ������Ŷȷ��䣬��
�ϵ������ŶȺ�����m1��m2�ֱ������Ӧ�Ļ������Ŷȷ��䣬��![]() ��m(A)��0, ��AΪ��Ԫ����Ԫ�ֱ�ΪA1��A2������Ak��B1��B2������Bn����
��m(A)��0, ��AΪ��Ԫ����Ԫ�ֱ�ΪA1��A2������Ak��B1��B2������Bn����
![]()
��ô���ϳɺ�Ļ������Ŷȷ��亯��m��![]() Ϊ
Ϊ
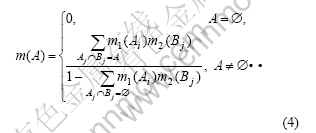
��m�������ŶȺ����ĺ��ĵ���Bel1��Bel2���ĵĽ�����m�������ŶȺ�����ΪBel1��Bel2��ֱ�͡���Ϊ![]() �����ʽ(3)����������ô��˵Bel1��Bel2��ֱ�Ͳ����ڡ�
�����ʽ(3)����������ô��˵Bel1��Bel2��ֱ�Ͳ����ڡ�
b. ����ŶȺ�������Ϲ�����Bel1������Beln��ͬһʶ����![]() �ϵ��ŶȺ�����m1������mn�Ƕ�Ӧ�Ļ������Ŷȷ��䣬���
�ϵ��ŶȺ�����m1������mn�Ƕ�Ӧ�Ļ������Ŷȷ��䣬���![]() �����һ������Ŷȷ���Ϊm����n�����κ��������Ϊ��
�����һ������Ŷȷ���Ϊm����n�����κ��������Ϊ��
![]()
�����֤�ݻ�õ�����֤����������ء�
2.2.3 ֤�������ںϾ���
���IJ���D-S֤���ں϶���������ֲ���Ͻ������D-S֤����Ϲ�������ںϺͼ��㣬����ʵ�ֹ��ϵ�ȷ��λ�����ȣ��Ը������������������й�һ��������ΪD-S�ںϵ����롣
�������������һ����������Ϊ�����ӹ��Ͽռ��й��ϵĻ������Ŷȷ��䣬��������Ϲ���õ��������ϵ����տ��Ŷȷ��䣬������þ����о���������о���
3 ���ʵ��
ѡȡˮ�ַ����������5�ֹ������ͣ�ת�Ӳ�ƽ�⡢ת�Ӳ����С�������ĥ��βˮ��ƫ���д��������н�����ϡ�����5�ֹ��Ϸ��������������Ļ����ϣ�ѡȡ9�ֹ�������������Ϊ���й���ʶ�����Ϣ����Ϊ���ࣺ5��Ƶ�ʽṹ(0.18-0.20f0, 1/6-1/2f0, f0, 2f0, 3f0, ����f0Ϊ��Ƶ)��4�����в���(����ת�٣����鸺�ɣ��Ͽ�ѹ���ͻ�������)��
3.1 �ֲ��������
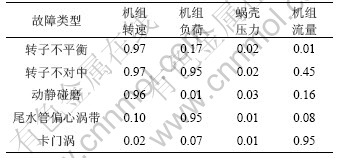
2����������ֱ����3��BP�����硣����������Ԫ������ѵ���ֱ�ȷ��Ϊ9����8������������Ԫ����5/9/5, 4/8/5����ƽ�����Ŀ��Ϊ0.02����������Ϊ0.95��ѵ���������1�ͱ�2��ʾ��
��1 ������1����ѵ������
Table 1 First net input training swatch
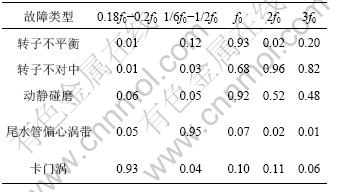
��2 ������2����ѵ������
Table 2 Second net input training swatch
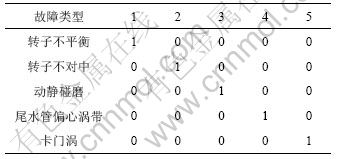
������ý�ʦѧϰ��ʽ�������Ŀ��������3��ʾ��������ij������ڵ�Ϊ��1��ʱ��ʾ��Ӧ���Ϸ�������0����ʾ��Ӧ���ϲ�������
��3 �˹�������Ŀ�����
Table 3 Target output of ANN
����ijˮ�ַ������ʵ����Ϣ��2����������Բ���ֵ��һ����õ�5��Ƶ�ʽṹ{0.01,0.02,0.96, 0.05,0.10}��4�����в���{0.91,0.10,0.12,0.09}��
������������ø�����������������������ѵ��������2������õ�������ֵ�ֱ���Ϊ2��������������������ϡ��õ����������仯���߷ֱ���ͼ3��4��ʾ��
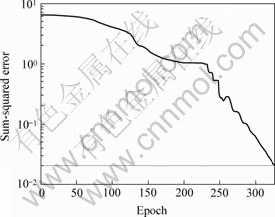
ͼ3 ������1���仯
Fig.3 First net learning error curve
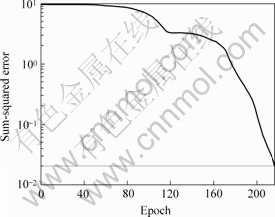
ͼ4 ������2���仯
Fig.4 Second net learning error curve
2�����������������ɵĹ��Ͼ���Ϊ

3.2 ���߹������
��2��������������֪���Թ��ϵ����Ŷȶ�С�����Ŷ�����0.95��������֤���ں��㷨��������������о�����ϡ����ȶ����������������ʽ(6)���й�һ������(ȡ2λ��Ч����)��������ɵã�
![]()
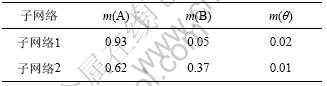
��һ������Կ������ܵĹ���Ϊת�Ӳ�ƽ��Ͷ�����ĥ�����Զ������ֹ��Ͻ���D-S֤����ϡ���ͬ������Ŀ��Ŷȷ������(4)��ʾ��m(A)��ʾ�Թ���A�����ζȣ�m(B)��ʾ�Թ���B�����ζȣ�m(��)��ʾ�������͵IJ�ȷ���ȡ�
��4 ��ͬ������Ŀ��Ŷ�
Table 4 Different net reliabilities
����ʽ(4)���������1��������2�ںϺ�ĸ����Ͽ��Ŷȷ������(5)���У�
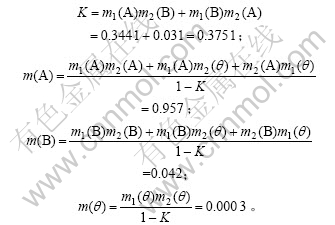
��5 ������1��������2�ںϽ��
Table 5 Two nets fusion results

�Աȱ�4�ͱ�5��֪���ںϺ����A�Ŀ��Ŷ���ߣ��ﵽ0.957���������Ŷ�����0.95��������B�Ŀ��Ŷ��½����ںϺ�IJ�ȷ���ȱ�ԭ��2���������IJ�ȷ�����½���֤�������ںϹ�����ϵľ��������ɾ����ںϽ����֪��������Ϊת�Ӳ�ƽ�⡣
4 �� ��
����BP�������D-S֤�����۵���Ϣ�ںϷ�����ˮ�ַ���������Ͻ�����ϣ������ʵ����֪��Ϣ�ںϼ���Ӧ����ˮ�ַ�����������ϵͳ����Ч�������ȷ���ʣ�ʹ��Ͻ�����и��ߵĿɿ��Ժ;�ȷ��(���ʵ���й���A�Ŀ��Ŷ���ߵ�0.957��������������0.95)��������ϵIJ�ȷ����(���ʵ���в�ȷ���Ƚ���Ϊ0.000 3������˲�ȷ����)��Ϊˮ�ַ�����������ϵ��о��ṩ����Ч�ķ�����;����
�ο����ף�
[1] ����Ӣ, �ų�ƽ. ���ڶഫ������Ϣ�ںϼ���[J]. ��ľ˹��ѧѧ��, 2004, 22(1): 28-33.
LIU Hai-ying, ZHANG Chi-ping. A study on multi-sensor information fusion technology [J]. Journal of Jiamusi University (Natural Science Edition), 2004, 22(1): 28-33.
[2] �� Ȫ, �� �, ��ӽ÷, ��. ��Ϣ�ں����۵Ļ����������չ[J]. �Զ���ѧ��, 2003, 29(4): 599-615.
PAN Quan, YU Xin, CHENG Yong-mei, et al. Essential methods and progress of information fusion theory [J]. Acta Altomatica Sinica, 2003, 29(4): 599-615.
[3] ������, ������, ������. �ഫ������Ϣ�ں�����[J]. �Ӻ���ѧ���ݷ�Уѧ��, 2005, 19(1): 1-5.
FAN Xin-nan, SU Li-yuan, GUO Jian-jia. Summary of multi-sensor information fusion[J]. Journal of Hehai University Changzhou Campus, 2005, 19(1): 1-5.
[4] ��ͬ��, ����ѫ, ����. �����ںϼ�������Ӧ��[M]. �����������Ƽ�������, 1998: 1-20.
LIU Tong-ming, XIA Zu-xun, XIE Hong-cheng. The information fusion technology and application[M]. Beijing: National Defense Technology Press, 1998: 1-20.
[5] ���ι�, ��һ�ɣ�������. ����Rough������Ϣ�ں�Ŀ��ʶ��[J]. �����뼤���, 2005, 34(1): 102-105.
CAO Zhi-guo, WU Yi-fei, ZHANG Tian-xu. Approach of target recognition by data fusion based on rough sets[J]. Infrared and Laser Engineering, 2005, 34(1): 102-105.
[6] ��ݷԪ, ������, ������. �ഫ����Ŀ��ʶ����Ż��ں�[J]. �ѧ��, 2005, 26(1): 47-51.
YANG Shen-yuan, PU Shu-jin, MA Hui-zhu. Optimized fusion in multi-sensor target recognition[J]. Journal of Astronautics, 2005, 26(1): 47-51.
[7] ��־ǿ. ��������������С���任ͼ���ںϷ���[J]. �人������ѧѧ��, 2005, 22(2): 65-68.
GUO Zhi-qiang. Wavelet transform image fusion based on regional features[J]. Journal of Wuhan University of Technology, 2005, 22(2): 65-68.
[8] ������, �� ��, �� ��, ��. һ�ֻ���С����߶ȱ�Ե����ͼ���ں��㷨[J]. ��������Ϣѧ��, 2005, 27(1): 56-59.
XIA Ming-ge, HE You, SU Feng, et al. Multiscale edge detection image fusion algorithm using wavelet transform[J]. Journal of Electronics and Information Technology, 2005, 27(1): 56-59.
[9] �Ե���, �� ޱ, �����, ��. ˮ��������ϵ���Ϣ�ں����������о�[J]. �й��������ѧ��, 2005, 25(20): 137-142.
ZHAO Dao-li, MA Wei, LIANG Wu-ke, et al. On data fusion fault diagnosis and simulation of hydroelectric units vibration[J]. Proceedings of the CSEE, 2005, 25(20): 137-142.
[10] ����Ȫ. ���ص�����·�༶��Ϣ�ںϼ����Ĺ������[J]. ս����������, 2004, (2): 18-21.
KONG Xiang-quan. Fault diagnosis of airborne missile circuit based on hierarchical information fusion[J]. Tactical Missile Technology, 2004, (2): 18-21.
[11] ����Ƽ, �Ϻ���, �Ž���. ��Ϣ�ںϼ�����ˮ�ַ�������������е�Ӧ��[J]. ˮ������ѧ��, 2004, 23(6): 111-115.
YANG Xiao-ping, NAN Hai-peng, ZHANG Jiang-bin. Application of information fusion technology on fault diagnosis of hydropower generating unit[J]. Journal of Hydroelectric Engineering, 2004, 23(6): 111-115.
[12] �� ��, �� ��, �� ��. ������������ˮ�ַ�������������е�Ӧ��[J]. �й�ũ��ˮ��ˮ��, 2005, (1): 100-102.
LI Hui, JIA Rong, BAI Liang. Application of integrated neutral network in hydraulic turbine generator��s fault diagnose[J]. China Country Waterpower Press, 2005, (1): 100-102.
[13] ������, ������, ��ҫ��. ������������֤�����۵�ģ���·�������[J]. ��·��ϵͳѧ��, 2005, 10(1): 35-39.
PENG Min-fang, HE Yi-gang, WANG Yao-nan. Fault diagnosis of analog circuits based on neural network and evidence theory[J]. Journal of Circuits and Systems, 2005, 10(1): 35-39.
[14] ������. ֤����������ߡ��˹�����[M]. �������й������ѧ������, 1993: 13-30.
DUAN Xin-sheng. Evidence Theory And decision-making, artificial aptitude[M]. Beijing: Renmin University of China Press, 1993: 13-30.
[15] ���ʷ�, �� ƽ, ��ϲ��. ����D- S���������ַ�������ں����[J]. ���ֻ�����, 2003, 45(2): 116-118.
DONG Cai-feng, MA Ping, WEI Xi-bin. Fault diagnosis based on the dempster-shafer theory of evidence for turbine generator set[J]. Turbine Technology, 2003, 45(2): 116-118.
�ո����ڣ�2006-10-08
����飺�ؽ���(1965-)���У����������ˣ���ʿ�����ڣ����¸��ӻ���ϵͳ����������ơ������������̽�ģ���Ż������о�
ͨѶ���ߣ��ԡ��Ů��˶ʿ�о������绰��13787064335; E-mail: zhaorui0303@126.com
[1] ����Ӣ, �ų�ƽ. ���ڶഫ������Ϣ�ںϼ���[J]. ��ľ˹��ѧѧ��, 2004, 22(1): 28-33.
[2] �� Ȫ, �� �, ��ӽ÷, ��. ��Ϣ�ں����۵Ļ����������չ[J]. �Զ���ѧ��, 2003, 29(4): 599-615.
[3] ������, ������, ������. �ഫ������Ϣ�ں�����[J]. �Ӻ���ѧ���ݷ�Уѧ��, 2005, 19(1): 1-5.
[4] ��ͬ��, ����ѫ, ����. �����ںϼ�������Ӧ��[M]. �����������Ƽ�������, 1998: 1-20.
[5] ���ι�, ��һ�ɣ�������. ����Rough������Ϣ�ں�Ŀ��ʶ��[J]. �����뼤���, 2005, 34(1): 102-105.
[6] ��ݷԪ, ������, ������. �ഫ����Ŀ��ʶ����Ż��ں�[J]. �ѧ��, 2005, 26(1): 47-51.
[7] ��־ǿ. ��������������С���任ͼ���ںϷ���[J]. �人������ѧѧ��, 2005, 22(2): 65-68.
[8] ������, �� ��, �� ��, ��. һ�ֻ���С����߶ȱ�Ե����ͼ���ں��㷨[J]. ��������Ϣѧ��, 2005, 27(1): 56-59.
[9] �Ե���, �� ޱ, �����, ��. ˮ��������ϵ���Ϣ�ں����������о�[J]. �й��������ѧ��, 2005, 25(20): 137-142.
[10] ����Ȫ. ���ص�����·�༶��Ϣ�ںϼ����Ĺ������[J]. ս����������, 2004, (2): 18-21.
[11] ����Ƽ, �Ϻ���, �Ž���. ��Ϣ�ںϼ�����ˮ�ַ�������������е�Ӧ��[J]. ˮ������ѧ��, 2004, 23(6): 111-115.
[12] �� ��, �� ��, �� ��. ������������ˮ�ַ�������������е�Ӧ��[J]. �й�ũ��ˮ��ˮ��, 2005, (1): 100-102.
[13] ������, ������, ��ҫ��. ������������֤�����۵�ģ���·�������[J]. ��·��ϵͳѧ��, 2005, 10(1): 35-39.
[14] ������. ֤����������ߡ��˹�����[M]. �������й������ѧ������, 1993: 13-30.
[15] ���ʷ�, �� ƽ, ��ϲ��. ����D- S���������ַ�������ں����[J]. ���ֻ�����, 2003, 45(2): 116-118.
