
���±�ţ�1004-0609(2012)03-0922-06
��Ƶ��ص�Ŵų�������������
������1, 2���� ��3���� ʤ3��ϯ����1, 2���� ��1, 2
(1. ���ϴ�ѧ ��ɫ�����ɿ�Ԥ��������ص�ʵ���ң���ɳ 410083��
2. ���ϴ�ѧ �����ѧ����Ϣ����ѧԺ����ɳ410083��3. ��ɳ��ά�ؿƿ��켼���������ι�˾����ɳ 410205)
ժ Ҫ��
��Ӧʽ�ų�������һֱ���ҹ���ŷ�������չ��ƿ���������ص�ŷ��в�����شų���Ҫ���ø�Ӧʽ�ų���������Ϊ�ˣ�������Ƶ��ص�ų�Դ���ص㣬�Ӹ�Ӧʽ�ų��������Ļ���ԭ����������ƴ������Ĵ�о����Ȧ����ṹ�Լ���Ȧ��г��Ƶ�ʣ����⣬�����˴�ͨ������������Ƶ�ʲ����ķ�������չ�˴�������Ƶ�����õ�����1 Hz~9.8 kHzƵ����Χ��ƽ̹��Ϊ��1.5 dB�����������ߣ�������Ƶ��ص��̽�����Ҫ��
�ؼ��ʣ�
��Ƶ��ص������Ӧʽ�ų�������������������ͨ��������
��ͼ����ţ�TM937.1��TP212.1���� ���ױ�־�룺A
Development of magnetic sensor in
audio-frequency magnetotelluric sounding
CHEN Xing-peng1, 2, SONG Gang3, ZHOU Sheng3, XI Zhen-zhu1, 2, WANG He1, 2
(1. Key Laboratory of Metallogenic Prediction of Nonferrous Metals, Ministry of Education,
Central South University, Changsha 410083, China;
2. School of Geosciences and Info-Physics, Central South University, Changsha 410083, China;
3. Changsha 5D Geo-survey & Technical Co., Ltd., Changsha 410205, China)
Abstract: Magnetic field induction sensors have been the bottleneck in the development of electromagnetic devices in China. In abroad, the natural geomagnetic variations are mainly measured by magnetic field induction sensors in magnetotelluric methods. According to the characteristics of the natural geomagnetic variations in audio-frequency band and the basic principle of magnetic field induction sensors, the structure of core, coil winding and the resonant frequency of the sensor were designed. With the magnetic flux negative feedback and frequency compensation, the frequency band is extended and the flat resulting amplitude-frequency response is obtained in the frequency band of 1 Hz-9.8 kHz with the deviation no more than ��1.5 dB. It can be used in audio-frequency magnetotelluric sounding.
Key words: audio-frequency magnetotelluric sounding method; magnetic field induction sensor; sensitivity; magnetic flux negative feedback
����Զ������Ϊ��Դ����Ƶ��ص�ŷ�(AMT)�����гɱ��ͣ�Ч�ʸߣ���̽��ȴ�(ͨ���ɴ�2km)�����ܸ�������κͶԵ�������нϸߵķֱ��������ŵ㣬�������ڵ��ȡ������غ�ú��̽�⼰��������ҿ������õ��˹㷺��Ӧ�ã������ŷdz�������Ӧ��ǰ��[1]�����ǣ�������Ȼ��ų����ź�ʮ�������ر�����Ƶ��Χ�ڴŷ������ź�ʮ������ͼ1��ʾΪһ��ȫ��ų�ǿ��ƽ�����������ͼ[2]����ͼ��1967��Compbell���о��ɹ�����ͼ1���Կ�������Ƶ��ص�ų����źŷ�ֵΪ��٤������������ˣ���Ƶ��ص����Ҫ��ų����������и������ȡ��ߴų��ֱ��ʺͿ�Ƶ�������ܣ��Ա������Ĵų��ź�[3]������Ӧʽ�ų��������������������ȡ��ų��ֱ��ʡ��������棬�����ڱ�Я�Է��涼�ܹ�ʤ��[4]��
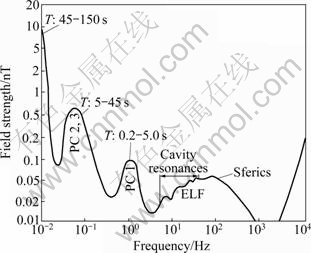
ͼ1 ��شų�ǿ��ƽ�����������[2]
Fig. 1 Typical average amplitude spectrum of geomagnetic variations[2]
Ŀǰ���г���������Ƶ��ص�Ų���Ĵų��������ֶ�����ŷ�����������죬Ƶ�����������ͣ������ȸߣ���¹�METRONIX��˾������MFS-07������ZONGE��˾������ANT-5/6��EMI��˾������BF-6/10�����ô�PHEONIX��˾������AMTC-30���ڿ���������LEMI-118/120�ȡ���������Ƶ��ص�Ŵų���������Ҫ�������ڣ����۸��Ҷ��ڸ������ȵĴų���������������ҹ��������ƣ�������Լ���ҹ���ŷ���̽װ���ķ�չ[5]��Ϊ��Ӧ���ʿ�̽������Ҫ�ͼ��������Ĺ��������������߶���Ƶ��ص�Ŵų������������о��������һ�������������� 1 Hz~9.8 kHzƵ�η�Χ�ڲ���Ƶ�ʱ仯�Ĵų����������Խ����Ȼ��ų���Ƶ��Χ�ڴ��ź�ʮ�����Ͷ�̬��Χ������⣬���⾫�ȡ�
1 ��Ӧʽ�ų��������Ļ���ԭ��
��Ӧʽ�ų���������ԭ���ǻ��ڷ����ڵ�Ÿ�Ӧ����[6]�������Ȧ������ΪN��������о�Ĵ�ͨ��Ϊ������о����Ч�ŵ���Ϊ��c����о����Ч������ΪS��ƽ���ڴ�о���ⲿ�Ÿ�Ӧǿ��ΪB����ô��Ȧ�ĸ�Ӧ��ѹΪ
![]() (1)
(1)
��Ƶ�����У���Ȧ�ĸ�Ӧ��ѹΪ
![]() (2)
(2)
ʽ�У���Ϊ��Ƶ�ʡ���Ȧ��������ϵ��(SF)Ϊ
![]() (3)
(3)
�����������£�����ʽ(2)����Ȧ�ĸ�Ӧ��ѹ������Ƶ�ʵ����Ӷ����������ӵģ��������ڸ�Ӧ��Ȧ������ֱ������R�����L�����м�������C���γ���г���·��ʹ�ø�Ӧ��ѹV��ø��Ӹ��ӡ�ͼ2��ʾΪ��Ȧ��Ӧ��ѹ�ĵ���Ƶ������ͼ����ͼ2���Կ�����ʽ(2)ֻ��г��Ƶ�����µ�Ƶ�η�Χ�ڳ�����
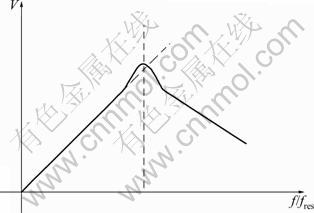
ͼ2 ��Ȧ��Ӧ��ѹƵ������ͼ(����Ϊ�����Ӧ��ѹ��ʵ��Ϊʵ�ʸ�Ӧ��ѹ)
Fig. 2 Typical frequency characteristic of an induction coil (Solid line��amplitude-frequency response of an induction coil output peak voltage V in resonance mode (fres is resonance frequency); dashed line��ideal shape of this response)
2 ��о����Ȧ�ṹ����Ʒ���
ͨ������ʽ(3)��֪����Ӧ��Ȧ����������������Ȧ������N����о����Ч������S����Ч�ŵ��ʦ�c��Ϊ�˻����ѵĴų�����Ч�����ͱ���ʹ��Ӧ��Ȧ����Ҫ���Ƶ���ھ������������ȡ���˾�����ʹ��������ij˻����[7]��
2.1 ��о��Ч�ŵ��ʵ���Ʒ���
���ȷ�����о����Ч�ŵ��ʦ�c��Ϊ�˻�þ����ܴ����Ч�ŵ���ֵ�����ó�ʼ�ŵ��ʦ�r�Ƚϸߵ����Ų��ϣ�����Ī�Ͻ����β��ϡ����������˴�ϵ���Ĵ��ڣ�ʹ��о����Ч�ŵ���ԶС�����Ų��ϵij�ʼ�ŵ��ʡ���о����Ч�ŵ�������ʽ����[8]��
![]() (4)
(4)
ʽ�У�NdΪ�˴�ϵ�������ڳ�����Ϊm����ת��Բ���о�����˴�ϵ���������������Ų��ϵij�ʼ�ŵ��ʦ�r���������ڴ�о����״�ṹ��STONER������ȷ�ļ��㹫ʽ[9]��
![]() (5)
(5)
ʽ�У�m=l/d��lΪ��о�ij��ȣ�dΪ��о��ֱ��������ϸ����Բ�壬ʽ(5)�ɼ�Ϊ
![]() (6)
(6)
���Ų��ϵij�ʼ�ŵ��ʦ�r������ʱ����¶ȵĸı���ı䣬Ϊ����ߴų����������ȶ��Ժͻ�����Ӧ�ԣ��ͱ��뱣֤��Ч�ŵ��ʦ�cΪ��������ˣ����˴�ϵ��Nd(��о����״�ṹ)�ͳ�ʼ�ŵ��ʦ�r(���Ų��ϵ�ѡ��)����Ʒ�����Ϊ��Ҫ��ͼ3[10]�������ڳ�����mһ��������£���֤ϸ��Բ�����о��Ч�ŵ��ʦ�cΪ����ʱ�����Ų��ϳ�ʼ�ŵ��ʦ�r����Сֵ�����磬���ó�����m=50��ϸ��Բ�����о����ô�ͱ���Ҫ�����Ų��ϵij�ʼ�ŵ��ʦ�r��30 000����������ʱ����ⲿ�����ı仯���ų��������������Ⱦͻ��ò� �ȶ���
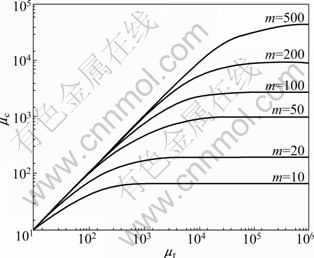
ͼ3 ������m��ͬʱϸ��Բ�����о��Ч�ŵ��ʦ�c���ʼ�ŵ��ʦ�r�ı仯����
Fig. 3 Core permeability ��c of cylindrical rods versus material permeability ��r with different length-to-diameter ratios m of rod
��о����Ч�ŵ��ʦ�cԽ�ų���������������Ҳ��Խ����ˣ�ͨ������ϸ����״�Ĵ�о�����ۺϿ��Ǵų��������ı�Я�Ժ�ʵ���Ե�����£�һ��ѡ���о�ij�����50��m��100�����Ų��ϵij�ʼ�ŵ� �ʦ�r��50 000����ʱ��о����Ч�ŵ��ʦ�c�ﵽ2 500�����Ҵų��������������������Ų��ϳ�ʼ�ŵ��ʦ�r�ı仯��С��
2.2 ��о��Ч����������Ʒ���
��ʽ(3)��֪����о����Ч������SҲֱ��Ӱ���Ŵų��������������ȡ����Ǵ�����Դ�о��Ч�ŵ��ʵķ�����֪������ƴ�о��Ч�ŵ���ʱ�����Ҫ��ij�����m=l/d�Ѿ�����һ��������˴�о����Ч����������������о����Ч������S��Ҳ�͵��������о��ֱ��d���Ӷ���С�˴�о�ij�����m��������С�˴�о����Ч�ŵ��ʦ�c��������������ͨ�������о��Ч����������ߴų������������ȵ����á�EUGENE��ASAF[11]ͨ����ϸ����о���˸�������һ�顰��ͨ���п顱�ķ����˷������ȱ�㣬���������Ӵ�о��Ч��������ͬʱȴ����ı��о�ij�����m��������ͨ���п顱��ֱ��Dc�ʹ�о��ֱ��d֮��ԼΪ5ʱ���ų���������������������2����
2.3 ��Ȧ�������������Ʒ���
ʵ���ϣ�һζ��������Ȧ��������ߴų������������ȵķ���������ȡ����Ϊͭ���ߴ���ֱ�����裬������Ȧ������ͬʱҲ�����˸�Ӧ��Ȧ��ֱ������͵���������������������ͻ�ʹ��Ӧ��Ȧ������ȶ��������������Ȧ������ͬʱ�����߾����ͭ���ߣ������ֻ�������Ȧ�����������ۺ�ʵ���о��������ų�����������������ֵȡ������Ȧ�����������Դų�����������������Ҫ������Ȧ����������������Ȧ������ѡ����Ҫ�����ڸ�Ӧ��Ȧ��ǰ�÷Ŵ���������ƥ��[12]��
��ʵ�ϣ���Ȧ������ֲ�ͬ��Ҳ��Ӱ��ų��������������ȡ�ͭ���߲���ֱ�����ڴ�о�ϣ��������ڴ������Ǽ��ϣ�������Ȧ����һ���⾶De��һ���ھ�Di������De��Di��d�������������֮���ֵ���Խ����ô�ų��������������Ⱦ�Խ�͡���ˣ��ų��������������Ⱥ�Ӧ��Ȧ��ƽ���뾶Dm=(De+Di)/2�ɷ��ȵĹ�ϵ������һ����о��Ȧϵͳ����Ӧ��Ȧ��ƽ���뾶�ʹ�о����Ч�ŵ��ʻ������c��Dm-3/2��
��Ȧ���鳤��lnͬ��Ҳ��Ӱ��ų��������������ȡ���ʵ�ϣ���о�м����Ч�ŵ��������������ߣ�������С�����Ҷ���ϸ��������״��о�������ĵ���Ч�ŵ��ʦ�cc����ʽ�ó���
 (7)
(7)
��ˣ�Ϊ�˱����ԵЧӦ�ͻ�ýϸߵ������ȵ�ѹ����Ȧ���鳤��lnҪ�ȴ�о����lС��������Ȧ���鳤��Ҳ����̫�̣�������ͬ������ͭ�߳��Ƚ��䳤��������Ȧֱ������������������������ݺͽ�������Ҳ���仵��һ�㽨��ln��(0.5~0.7)l[13]��ͬʱΪ�˼�С�������ݣ���Ҫ����Ȧ�ֶ����ƣ�Ȼ��ÿ����Ȧ�������������ݴ���ʱ��ɱ���С���������Լ�С�ܵļ�������[14]��
�����鳤��Ϊln������£���о��Ч�ŵ��ʵ�ƽ��ֵ��ccaΪ
![]() (8)
(8)
3 �ų����������������
��Ƶ��ص���Ǵų�������������Ƶ�ʷ�ΧΪ0.1~8 192 Hz������Ȼ�ų��źţ����Ҹ���Ȼ�ų��ź���2 kHz������һ�ֲ���Сֵ��С��1 pT��Ϊ�˼���ô���Ĵų��źţ����ų���������г��Ƶ�������1~5 kHz֮�ڣ���Ϊ��г��Ƶ�ʸ�������������������ѡ�����Ȧ����Ʒ�����֪���ų�����������������ֵȡ������Ȧ����������ˣ��ڸ�����Ȧ����������£���ѡ���߾�С��ͭ�ߣ���Ȼ�����Ƹ�������������Ǹ�Ӧ��Ȧ�ĵ�кͼ������ݻ����ƴų���������Ƶ������ѡ���߾����ͭ�ߣ���Ȼ���Լ�С��Ȧ��ֱ�����裬����ǰ�÷Ŵ���������ˮƽ�������Ȧ�����������������Ϊ�˵õ����ʵ�г��Ƶ�ʺͿ�������ƥ�����⣬ѡ��ͭ�ߵ��߾�Ϊ0.45 mm����Ȧ������Ϊ12 000�ѣ�ͬʱ����Ȧ��10�����ơ�
�ɴ�о����Ʒ�����֪���ų��������������Ⱥʹ�о����Ч�ŵ��ʡ���Ч�����������ȣ�������ѡ����о����lʱ����Ч�ŵ��ʺͺ����������Լ�Ĺ�ϵ����ˣ��ڼ����Ч�ŵ��ʺ���Ч��������ͬʱ��ѡ��l=600 mm�������Ϊ19 mm��19 mm�Ĵ�о����о�ɳ�ʼ�ŵ��ʦ�r=120 000�������ʦ�=90 �̦���cm3�����Ϊ��=35 ��m�����������Ͻ���IJ�����ɡ���о�ĵ�Чֱ��Ϊ21.4 mm����ʽ(4)��ʽ(5)����Ч�ŵ��ʦ�c=259��
��Ϊ��о����Ч�ŵ��ʲ����Ǿ��ȷֲ��ģ��ڴ�о�е���Ч�ŵ��������������Ч�ŵ�����С����ˣ�Ϊ�˵õ��Ƚϵĸ������Ⱥͱ����ԵЧӦ��ѡ������ij���ln=360 mm����ʽ(7)��ʽ(8)�ɵã������鳤��ln=360 mmʱ��о��Ч�ŵ��ʵ�ƽ��ֵΪ��cca= 310��
���ڦ�c=259ʱ����ʽ(3)�������Ȧ��������ϵ��SF=7.05 ��V/(nT��Hz)����������Ȧ���������ʱ��������õ��Ħ�cca=310����ʽ(3)�������Ȧ��������ϵ��SF=8.44 ��V/(nT��Hz)�����ų�����������һ��������Ȧ���ģ�Ȼ�����Ȧ����֪�����������ȴų��Դ���������Ȧ��������ϵ����ʵ����SF=7.94 ��V/(nT��Hz)�������ۼ���Ľ���dz��Ǻϡ�
4 ǰ�÷Ŵ��·�ʹų���������Ƶ����Ӧ
û�о�����·���Ƶĸ�Ӧ��Ȧ����Ƶ�ʳ���г��Ƶ�ʺ���Ȧ�ĸ�Ӧ��ѹ�ͻἱ���½�����ˣ�����Ч���õ�Ƶ��ֻ����г��Ƶ�ʵ�һ�࣬���Ҹ�Ӧ��ѹ��Ƶ�ʳ����Ա仯����̬��Χ�Ƚϴ������������˴ų���������Ƶ����Χ���ֲ�������Ƶ��ص���ǶԴų��źŵIJɼ����ա�Ϊ����չƵ�����������г��Ƶ�ʣ�����Ʋ��ô�ͨ�������ļ����͵�Ƶ��·�����ķ��������Ƹ�Ӧ��Ȧ�����ĵ�ѹ�źš���������չ��Ƶ������ʹ�ôų���������Ƶ����Ӧ���߱Ƚ�ƽ ̹��
��ͨ��������ԭ���ǽ���Ȧ�ĸ�Ӧ��ѹ�Ŵ��������ת���ɵ��������������ڸ�Ӧ��Ȧ���ķ�����Ȧ���������ų��������Ա���ų��γɸ�������ʹ�ų��������γɱպϵĴ�ͨ������·[15]����ͨ������ԭ����ͼ4��ʾ��
ͼ4�У�Rsc��C��Lp�ֱ��Ǹ�Ӧ��Ȧ�ĵ��衢�������ݺ͵�У�LsΪ������Ȧ�ĵ�У�RfbΪ�������裬VΪ��Ȧ�ĸ�Ӧ��ѹ��GΪ��·�ķŴ�����G=1+ R1/[R2(1+j��R1C1)]��MΪ��Ӧ��Ȧ�ͷ�����Ȧ֮��Ļ��У���kΪ����ϵ����������Ȧ�������ʱk=1��![]() ��
��
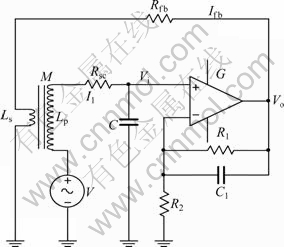
ͼ4 ��ͨ������ԭ��
Fig. 4 Principle diagram of magnetic flux negative feedback
��ͼ4��֪���ų�����������Ȧ������һ����·����������ϵͳ�Ĵ��亯�����£�
 (9)
(9)
ʽ�У�N1�Ǹ�Ӧ��Ȧ��������������[6]��֪�����Ƶ��ֹƵ��fL��Ƶ��ֹƵ��fH�ֱ����£�
![]() (10)
(10)
![]() (11)
(11)
������fL��fH֮�䣬�ų�����������������Ӧ����Ϊһƽ̹���ߣ��ҷ�ֵΪ
![]() (12)
(12)
ʽ�У���0������еĴŵ��ʣ�N2�Ƿ�����Ȧ����������=1.85-1.1ln/lΪУ��ϵ����
��Ƶ��f��fLʱ���ų�����������������Ӧ���߲���ƽ̹��������Ƶ�ʳ����Ա仯��Ϊ�˻����ȫƵ�αȽ�ƽ̹�����������ߣ��Դų����������е�Ƶ��·��������·�����Ļ���˼������г��Ƶ�����߰����ߵ��ݶȽ��зŴ���г��Ƶ�ʵ㸽��������Χ��С���������źŷ��Ȳ���[16]��
����Ʋ���������Ȧ�������ȴų������Ը�Ӧ��Ȧ��Ƶ����Ӧ������������Ȧֻ���С�Ĺ��ʾ��ܲ����ʺ��ڴų��������궨�õĴų�ǿ�ȣ��������С�������Ĵų��ֲ��ȽϾ��ȡ�ʹ��������ŵ㣬�ʺ��ڴų����������ֳ����Ա궨[7]����������Ȧ������Ϊ100 kHz�İ����������������ų���������Ӧ��Ȧ����������Ȧ���ģ�ͨ�����ݲɼ����ɼ������źź�Ӧ��Ȧ����Ӧ�źţ����ɼ�������ͨ��Labview�����������п��ٸ���Ҷ�任���Ϳ��Եõ���Ӧ��Ȧ��Ƶ����Ӧ���ߡ�ͼ5��ʾΪû�о�����·���Ƶĸ�Ӧ��ȦƵ����Ӧ���ߡ���ͼ5���Կ�������Ȧ��г��Ƶ����2~3 kHz֮�䣬�ڸ�Ƶ�ʸ����ų�������������ѵĴų�����Ч�����������Ȼ�ų��ź��ڸ�Ƶ�ʴ����־ֲ���Сֵ�������������ѣ�����ǰ����������Ҫ��
������з�������Rfb=2.4 k����������Ȧ������N=30�ѡ�ͼ6��ʾΪ�������͵�ƵƵ�ʲ�����Ӧ��Ȧ��Ƶ����Ӧ���ߡ���ͼ6���Կ�������1 Hz~9.8 kHz��Ƶ����Χ�ڣ���Ȧ����Ӧ���߷dz�ƽ̹��ƽ̹�ȴ��1.5 dB�����ǣ���10 kHz������С����Ƶ����Ӧ���߾罵�����������ɷ�����Ȧ�����Ķ���г������ġ�����ͼ5��ͼ6����Ȧ��Ƶ����Ӧ������10 Hz��100 Hz֮����ֵļ������50 Hz�Ĺ�Ƶ��������ġ�
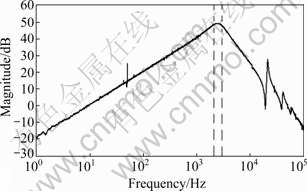
ͼ5 û��ǰ�÷Ŵ�������ȦƵ����Ӧ
Fig. 5 Frequency response of search coil without preamplifier
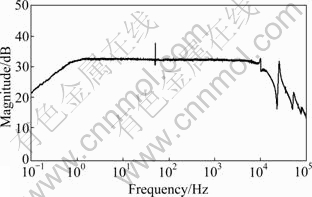
ͼ6 ������·��������ȦƵ����Ӧ
Fig. 6 Frequency response of search coil with preamplifier
����ͨ��������Ȧ�������ų��Դ��������������ȱ궨����������Ȧ����һ����ֵΪ1 ���IJ������貢ͨ��������źţ�����ÿ��Ƶ���´������������ѹ��ֵ�Ͳ����������˵ĵ�ѹ��ֵ��ͨ�������������˵ĵ�ѹ��ֵ�Ϳɻ�������������Ȧ�ĵ���������һ������õ�������Ȧ�����Ĵų�ǿ��ֵ���Ӷ��ɵõ��ڸ�Ƶ���´ų���������������ֵ���������Թ�����һ������������εĿռ��ڽ��С�ͼ7��ʾΪ������ƵĴų������������ȡ�Ƶ�����ߡ���1 Hz~9.8 kHzƵ����Χ�ڴ������������Ȳ���Ƶ�ʱ仯����ֵΪ40 mV/nT����0.01~1 HzƵ����Χ�ڣ�������������������Ƶ�ʣ���Ƶ��Ϊ0.1 Hzʱ����������������Ϊ10 mV/nT�����ܷ�����Ȧ����г���Ӱ�죬��10 kHz������������������ֵ�ȳ���С���Ȼ���½���
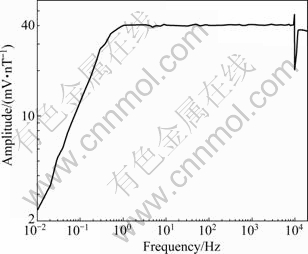
ͼ7 �ų������������ȡ�Ƶ������
Fig. 7 Amplitude��frequency response curve of magnetic sensor
5 ����
1) �ڷ�����о����Ȧ�ṹ�Դ�����������Ӱ��Ļ����ϣ��������Ȼ��ų���Ƶ�δŷ������ź���������ƴų�������г��Ƶ����2~3 kHz֮�䣬ʹ����Ƶ����Ȼ�ų��źžֲ���Сֵ��������ѵĴų�����Ч����
2) ���ô�ͨ������ԭ���ͶԴų������������˵�Ƶ��·��������չ��Ƶ�����õ�����1 Hz~9.8 kHzƵ����Χ��ƽ̹��Ϊ��1.5 dB�����������ߣ�������Ƶ��ص��̽�����Ҫ��
REFERENCES
[1] ������, �� ��. �編��̽�½�չ[M]. ����: ���ʳ�����, 1999: 28-46.
LUO Yan-zhong, WAN Le. New progress of electrical prospecting [M]. Beijing: Geological Publishing House, 1999: 28-46.
[2] KAUFMAN A A, KELLER G V. ��ص�Ų��[M]. ������, ������, ��ǰ��, �Թ���, ������, �� ��, ��. ����: ���������, 1987: 1-40.
KAUFMAN A A, KELLER G V. The magnetotelluric sounding method [M]. LIU Guo-dong, JIN Guang-wen, DENG Qian-hui, ZHAO Guo-zhe, WANG Bao-jun, SUN Hao, transl. Beijing: Earthquake Publishing House, 1987: 1-40.
[3] ���Ļ�, ������. ��Ƶ��ص�����дŴ���������ƺ��о�[J]. �ӱ���Ժѧ��, 1982(12): 14-26.
CHEN Wen-hua, WU Ming-qi. Design and research of magnetic sensor in Audio-frequency magnetotelluric sounding [J]. Journal of Hebei University of Geological, 1982(12): 14-26.
[4] LENZ J E. A review of magnetic sensors [J]. Proceedings of the IEEE, 1990, 78: 973-989.
[5] ��Ӣ��. ��Ӧʽ�Ŵ�������Ȧ��������ӿڵ�·���о�[D]. ����: ���ִ�ѧ, 2008: 1-3.
SHAO Ying-qiu. Magnetic induction sensor parameter of loop and study of its interface circuit [D]. Changchun: Jilin University, 2008: 1-3.
[6] SEARN H C, FERGEAU P. An optimized low-frequency three-axis search coil magnetometer for space research [J]. Review of Scientific Instruments, 2005, 76: 1-10.
[7] �����. ��ص�Ų������������[M]. ����: ���ʳ�����, 1989: 23-42.
ZHANG Xiu-cheng. Magnetotelluric measurement instrumentation [M]. Beijing: Geological Publishing House, 1989: 23-42.
[8] ��ʤ��. GCI-1A�ʹŸ�Ӧ����������о�����о�[J].�DZ������봫����, 1988(5): 21-25.
GENG Sheng-li. Research on ferromagnetic core of GCI-1A magnetic induction sensor [J]. Instrument Technique and Sensor, 1988(5): 21-25.
[9] RIPKA P. Magnetic sensors and magnetometer [M]. Norwood: Artech House, 2001: 57-65.
[10] BOZORTH R M, CHAPIN D M. Demagnetizing factor of rods [J]. Journal of Applied Physics, 1942, 3: 320-326.
[11] PAPERNO E, GROSZ A. A miniature and ultralow power search coil optimized for a 20 mHz to 2 kHz frequency range [J]. Journal of Applied of Physics, 2009, 105(7): 1-3.
[12] BOLL R, OVERSHOTT K J. Magnetic field sensors��Induction coil (search coil) sensors [M].VCH Publishers, 1989: 205-254.
[13] TUMANSKI S. Induction coil sensors��A review [J]. Measurement Science and Technology, 2007, 18: R31-R46.
[14] ������, �̵¸�, �� ��, �� ��. ���������Ͻ�Ŀ�Ƶ���ʽ�ų�������������[J]. ���м���ѧ��, 2007, 20(9): 1967-1969.
WANG Yan-zhang, CHEN De-fu, WANG Jun, LIN Jun. Research of broad frequency difference magnetic field sensor based on nanocrystalline alloy [J]. Chinese Journal of Sensors and Actuators, 2007, 20(9): 1967-1969.
[15] ��Ӣ��, �̵¸�, ������, �� ��. ���ڴŷ����Ŀ�Ƶ���Ŵ�����������[J]. �����DZ�ѧ��, 2010, 31(11): 2461-2466.
SHAO Ying-Qiu, CHEN De-fu, WANG Yan-zhang, ZHANG Fei. Development of broad frequency band magnetic field sensor based on flux feedback [J]. Chinese Journal of Scientific Instrument, 2010, 31(11): 2461-2466.
[16] �ּ���, �� ��, ����, �̵¸�. ���ڷǾ�̬�Ͻ�ĸ�Ӧʽ�������������о�[J]. �����DZ�ѧ��, 2004, 25(2): 195-198.
LIN Ji-peng, WANG Jun, LING Zhen-bao, CHEN De-fu. Research for induction magnetic sensor based on amorphous alloy [J]. Chinese Journal of Scientific Instrument, 2004, 25(2): 195-198.
(�༭ ��ѧ��)
������Ŀ�������ص�����о���չ�ƻ�������Ŀ(2007CB416608)
�ո����ڣ�2011-12-01�������ڣ�2012-01-04
ͨ�����ߣ�ϯ���������ڣ��绰��0731-88879330; E-mail: xizhenzhu@163.com
ժ Ҫ����Ӧʽ�ų�������һֱ���ҹ���ŷ�������չ��ƿ���������ص�ŷ��в�����شų���Ҫ���ø�Ӧʽ�ų���������Ϊ�ˣ�������Ƶ��ص�ų�Դ���ص㣬�Ӹ�Ӧʽ�ų��������Ļ���ԭ����������ƴ������Ĵ�о����Ȧ����ṹ�Լ���Ȧ��г��Ƶ�ʣ����⣬�����˴�ͨ������������Ƶ�ʲ����ķ�������չ�˴�������Ƶ�����õ�����1 Hz~9.8 kHzƵ����Χ��ƽ̹��Ϊ��1.5 dB�����������ߣ�������Ƶ��ص��̽�����Ҫ��
