
���ͻ��������ѹ������������������У��
������1, 2������ǿ1�������1��Ԭ�Ļ�1, 2
(1. ���ϴ�ѧ ��е����������ѧԺ������ ��ɳ��410082��
2. ����ѧԺ ��е����Դ����ϵ������ ������422000)
ժ Ҫ��
ժ Ҫ��Ϊ���������ͻ��������ѹ����������������״�������¶��Լ������������ظ��ŵ�Ӱ�죬������������Ϣ�ںϼ�����ѹ�����������е��¶��Լ����������ȸ������ؽ��з���������У��ʵ�顣���������������������У����ѹ����������Ŀ�������Ӱ�챻��Ч��������������ȶ��Ա�ԭ�������Լ19�����������ѹ�����������������������2.0%��
�ؼ��ʣ�
���ͻ���������У������������ѹ����������
��ͼ����ţ�TK312��TK411+29 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)03-0566-05
Nonlinear intelligent correction of pressure transducer from
air intake pipe in gasoline engine
JIANG Shou-sheng1, 2, E Jia-qiang1, GONG Jin-ke1, YUAN Wen-hua1, 2
(1. College of Mechanical and Automotive Engineering, Hunan University, Changsha 410082, China;
2. Department of Mechanical and Energy Engineering, Shaoyang College, Shaoyang 422000, China)
Abstract: In order to eliminate disturb effects caused by temperature parameter and fluctuant electric current on pressure transducer from air intake pipe in the gasoline engine in operation, nonlinear intelligent correction of pressure transducer from disturb effects caused by temperature parameter and fluctuant electric current was made based on neural network information fusion technology. The results show that some effects from non-goal parameter for pressure transducer can be eliminated availably by using nonlinear intelligent correction, and the output stability after being nonlinear corrected is twenty times as the output stability before being nonlinear corrected and the measurement precision is enhanced by 2.0% at least.
Key words: gasoline engine; nonlinear correction; neural network; pressure transducer
���ͻ��������ѹ�������ͻ�ȼ�������Ч ��������������������кܴ��Ӱ��[1-2]��ͨ����Ϊ���ͻ��������ѹ�����������ֻ��ѹ����Ӱ�죬��ʵ���ϣ�������ѹ�����������£������¶ȵı仯�Լ������Դ��ѹ�ı仯���������������ѹ�ı仯����ѹ�����������������Ŀ�������Ӱ���⣬���ܹ����¶Ⱥ͵�������ϵ����2����Ŀ�������Ӱ�졣Ϊ�˵õ���ȷ��ѹ��������������뾡������2����Ŀ������Դ���������������Ե�Ӱ�죬ʹѹ�������������������ĵ�ֵ����[3-5]��
��������������ݴ����Լ���ѧϰ������֯������Ӧ������ǿ��ķ����Դ�������������������ڽ��ѹ���������ķ�����У������[1, 6-7]����BP������������ֲ���С�㣬Ӱ��ϵͳ�Ŀ����ԣ���ʱ����������ѵ��Ҫ�Ӷ�Ӱ��ϵͳ�ľ��Ⱥ�ʵʱ �ԡ��������������ѧϰ����[8]����������Ϣ�ںϼ���[9-15]�Լ�����Ӧѧϰ���ʶ����ݶ��½��㷨[1]ѵ����BP�������������������ͻ��������ѹ��ʽѹ��������������״�����¶ȵ����ظ��Ŷ����Ӱ�죬�Ӷ��ڽϴ�̶�������˳������ͻ�������ܿ���������⾫�ȣ����о��ɹ�������ʵ���塣
1 �������ѹ������������������У��
1.1 ѧϰ������Ľ���
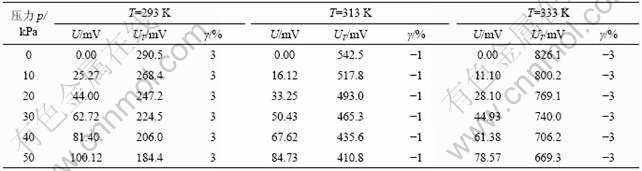
�����ͻ��������ѹ����������Ӧ�ı���ѹ��Ϊp���������������ѹΪU����ʵ�ʹ�����ѹ�����������ܹ����¶�T�����Դ�ĵ�������ϵ���õ�Ӱ�죬�������ѹʵ��Ϊ��Ԫ��������U = f ( p, T, ��)�������ݲ����У�ͬʱ����ѹ�����������¶ȴ������������������ֱ����ѹ����������ѹ���������¶��Լ������Դ�����IJ���ϵ���á������ͻ��������ѹ�������������¶ȷֱ�Ϊ293��313��333 Kʱ����������ϵ���ֱ�Ϊ3%��-1%��-3%���ⶨ�ı궨ʵ���������1��ʾ(���У�UTΪ�¶ȴ������������ѹ)��
��1 ѹ���������IJⶨ����
Table 1 Test data of pressure transducer
1.2 �������ݵĹ�һ��
����BP��������õĺ���Ϊ������S���ͺ�����˫�������С�S���ͺ������������ֵ�ֱ���(0��1)��(-1��1)��Ϊ�˱���ڵ㲻����Ѹ�ٽ��뱥��״̬��������ѧϰ��BP���������������ֵӦ���ǹ�һ������ֵ����Ҫ���������ݽ��й�һ����������ѹ���������������ѹ���¶ȴ������������ѹ����ʽ(1)���й�һ����
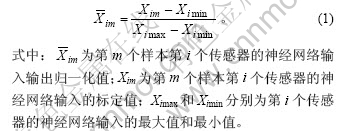
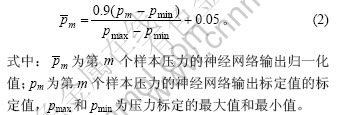
����ѹ��������ʽ(2)���й�һ����
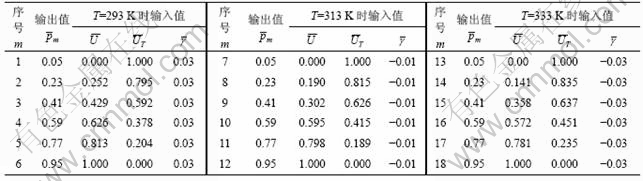
��һ����õ���������������������������2��ʾ��
��2 ��һ�����������������������������
Table 2 Standard sample base for input value and output value of neural network after being normalized
1.3 �������ѹ��������������У��ģ��
�������ͻ��������ѹ����������Ϣ�ںϵ�������ģ�ͣ����������õĹ�һ�����ݽ���ѵ�����Ա궨ѹ�������������ѹ�Ĺ�һ��ֵ![]() ���궨�¶ȴ�������һ��ֵ
���궨�¶ȴ�������һ��ֵ![]() ���궨��Դ����ϵ���Ĺ�һ��ֵ
���궨��Դ����ϵ���Ĺ�һ��ֵ![]() ��Ϊ����������룬�Ա궨ѹ�������������ѹ�Ĺ�һ��ֵ
��Ϊ����������룬�Ա궨ѹ�������������ѹ�Ĺ�һ��ֵ![]() ��Ϊ����������BP������ģ�Ͳ�����ͼ1��ʾ3-12-12-1�ṹ������i=3��j=12��k=12��l=1��
��Ϊ����������BP������ģ�Ͳ�����ͼ1��ʾ3-12-12-1�ṹ������i=3��j=12��k=12��l=1��
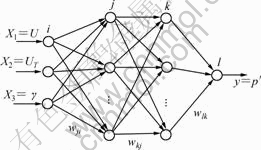
ͼ1 ѹ������������������У��ģ��
Fig.1 Neural network information fusion model of
pressure transducer
����BP�㷨����Ŀ����ʹ���������y=p���복��ѹ��������Ŀ������ı궨ֵpm֮��ľ�����ƽ����eΪ��С������
1.4 ѹ����������Ϣ�ںϵ��������㷨
����BP�㷨Ҳ��SDBP(Steepest descent backpropagation)��ʵ������һ�ּ������½���̬Ѱ���㷨����������ȱ�㣺
a. ��Ҫ�ϳ���ѵ��ʱ�䣻
b. ��ȫ����ѵ����ʹ�ö�����Ȩֵ�ĵ������� ͣ�٣�
c. ����ֲ���Сֵ��
Ϊ�˿˷�SDBP�㷨��ȱ�㣬����������Ľ��㷨����������Ӧѧϰ���ʶ����ݶ��½��㷨��������������������ֲ�ϸ�ڵ������ԣ���Ч�������������ھֲ���Сֵ��SDBP������tʱ�̵�Ȩֵw(t)ʱ��ֻ�ǰ���tʱ�̵ĸ��ݶȷ��������������û�п��ǵ���ǰ���۵ľ��飬����ǰʱ�̵��ݶȷ��Ӷ�����ʹѧϰ���̷�����������������������ǡǡ�˷�����һȱ�㣬�����㷨Ϊ��
���ַ�������Ķ�����ʵ�����൱���������������ѧϰ���̵������ƣ��Ӷ�����������ԡ�
������Ӧ����ѧϰ���㷨�˷���SDBP�㷨��ѧϰ��ѡ�����������ٶ�����ȱ�㣬����������ѧϰʱ�䣬���㷨Ϊ��
w(t+1)=w(t)+��(t)D(t)�� (5)
��(t)=2�� ��(t-1)�� (6)
��=sign[D(t)D(t-1)]�� (7)
������2�ε������ݶȷ�����ͬʱ������ѧϰ���ʶ����ݶ��½�̫������ʱ��ʹ�����ӱ���������2�ε������ݶȷ����෴ʱ������ѧϰ���ʶ����ݶ��½����죬��ʱ��ʹ�������롣����Ӧ����ѧϰ���㷨�ı�����Ϊ�ĸı�ѧϰ�ʵ���ֵäĿ�ԣ������ѧϰ�ٶȣ���ǿ�������ԡ�
�������2���㷨���ŵ㣬��������Ӧѧϰ���ʶ����ݶ��½��㷨������Ӧ����ѧϰ���㷨���ϲ��ԣ�������������Ӧѧϰ�㷨������
w(t+1)=w(t)+2�˦�(t-1)[(1-��t)D(t)+��tD(t-1)]�� (8)
ʽ�У���tΪ����Ӧ����ϵ����0�ܦ�t��1����t=1-[(t-1)/t]n��nΪ��������
���ø��㷨���������ݽ����ںϣ����Ŀ��Ϊ10-4ʱ��ѵ������¼��ͼ2��ʾ���ɼ����ںܶ�ʱ���ڣ�����20�ಽ�ʹﵽ�ϸߵľ��ȡ�BP������ѵ��������ͼ3��ʾ��
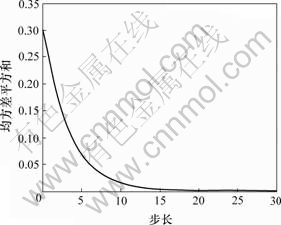
ͼ2 �������Ӧѧϰ�㷨���仯����
Fig.2 Error change curve of combined self-adaptive study algorithm
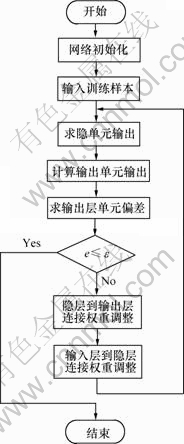
ͼ3 BP������ѵ������
Fig.3 Flow chart of train for BP neural network
1.5 �����������������
�ɱ�1��֪������ͬһ����ѹ��p�������������ѹU�湤���¶Ⱥ����Դ�������仯����|��y|maxΪ�������ѹ�������������ѹ�������Բ���ֵ��yFS=97.12 mVΪ�������ѹ�������������������ѹ(����t=20 ��ͦ�=0ʱ�������������ѹ)����������ѹ�������������ѹ���������ֵ��p=|��y|max/yFS��
�ɱ�1��ʾ���ݣ�����������ѹ�������������ѹ�����Բ���ֵ��pΪ22%���ɼ����������ѹ���������ܹ����¶Ⱥ͵�Դ������Ӱ�����൱��ġ�
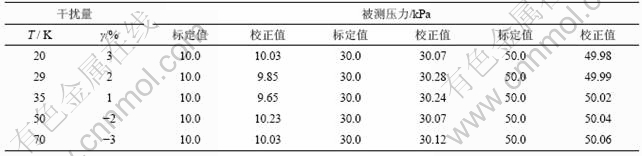
������������㱻��ѹ����У��ֵ�����������3��ʾ�����øĽ�BP������Խ������ѹ�����������ݽ����ںϴ����������ѹ�������������ѹ�����Բ���ֵ��pΪ1.16%���ɴ˿ɼ�������ͬ�Ĺ����¶ȱ仯�͵�Դ��������£��������ѹ��������������ȶ��Ա�ԭ�������Լ19������ˣ����������缼�������������ѹ���������ڹ������������ܵķ�Ŀ�������Ӱ����ʮ����Ч�ġ�
�ɼ������ͻ��������ѹ�����������Ľ�BP��������Ϣ�ںϺõ����¶��Լ���������ϵ��������������������ͻ�����״����ѹ�����������¶��Լ���������ϵ�����ظ��ŵ�Ӱ��ʮ����Ч��
2 �������ѹ���������������ȶԱ�ʵ��
�ڽ��������ͬʱ��װ����������������ƽ��жԱ�ʵ�顣�Կ���������������ƵIJ�������Ϊ����ѹ��������������У�����������������������ѹ��������δУ��ʱ�������������������ϵ��ͼ4��ʾ��
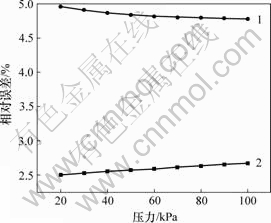
1��δУ��ʱ�������2��������У�����������
ͼ4 �������������������ȶԱ�
Fig.4 Contrast to measurement precision of air mass flux
��ͼ4���Կ��������Ž������ѹ�����ߣ��������ѹ��������������У��������������������������ƣ������������С��2.75%����δУ���������ѹ���������Ŀ������������������½������������ƣ����������������4.75%���������Сѹ��ʱ�Ĺ����¶�Ӱ��ϴ����¡��ɴ˿ɼ������Ľ�BP�������ںϴ����������ѹ�����������������������2.0%��
��3 ѹ��������������У�����
Table 3 Results of nonlinear intelligent correction on pressure transducer
3 �� ��
a. ����BP������Խ������ѹ�����������ݽ����ںϴ����������ѹ�������������ѹ�����Բ���ֵ��pΪ1.16%������ͬ�Ĺ����¶ȱ仯�͵�Դ��������£��������ѹ��������������ȶ��Ա�ԭ�����Լ19����
b. �������ѹ��������������У��������������������������ƣ���������С��2.75%����ѹ��������δУ�������������������½����ƣ����������������4.75%��
�ο����ף�
[1] ����ǿ. ����������ģ��������������Ϣ�ں����۷�������Ӧ��[D]. ��ɳ: ���ϴ�ѧ��������Ϣ����ѧԺ, 2006.
E Jia-qiang. Intelligent information fusion theory and technology of neural network and fuzzy reasoning and its application[D]. Changsha: College of Electrical and Information Engineering, Hunan University, 2006.
[2] Ԭ�Ļ�, ����ǿ, �����. ����ѹ������³��ö������ȼ��״������ϵͳ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(7): 763-768.
YUAN Wen-hua, E Jia-qiang, GONG Jin-ke. Combustion condition analysis system of vehicle engine with multi-cylinder under cylinder pressure monitoring[J]. Journal of Central South University: Science and Technology, 2006, 37(7): 763-768.
[3] Gerraniotis E, Chau Y A. Robust data fusion for multisensor detection systems[J]. IEEE Transaction on Information Theory, 1990, 36(6): 1265-1279.
[4] Thomopoulis S C, Boubouliias V R. Optimal decision fusion in multiple sensor system[J]. IEEE Transactions on Aerospace and Electronic Systems, 1987, 23(5): 644-653.
[5] Hong L, Lynch A. Recursive temporal-spatial information fusion with applications to target identification[J]. Transactions on Aerospace and Electronic Systems, 1993, 29(2): 435-445.
[6] �����. ������ϵͳ����[M]. ����: �������ӿƼ���ѧ������, 1990.
JIAO Li-cheng. Neural network system theory[M]. Xi��an: Xidian University Press, 1990.
[7] ����ǿ. ���ܹ�����ϼ���Ӧ��[M]. ��ɳ: ���ϴ�ѧ������, 2006.
E Jia-qiang. Intelligent fault diagnosis and its application[M]. Changsha: Hunan University Press, 2006.
[8] Hornik K, Stinchcombe M, White H. Multiplayer feedforward networks are universal approximator[J]. Neural Computing, 1990(2): 210-215.
[9] Bdeworth M, Obrien K. Omnibus model��A new model of data fusion[J]. IEEE Aerospace and Electronic System Magazine, 2000, 15(4): 30-38.
[10] Hall D I, Llinas J. An introduction to multi-sensor data fusion[J]. Processing of IEEE, 1997, 85(1): 1-29.
[11] LIU Jian-ye, SUN Yong-rong, HE Xiu-feng, et al. Design and realization on GPS/INS integrated navigation system[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 1998, 15(2): 165-171.
[12] Xie L, Soh Y C, Souza C. Robust kalman filter for uncertain discrete-time system[J]. IEEE Transaction on Automatic Control, 1994, 39(10): 1310-1338.
[13] Gamble R F. Using software architecture to formally derive synchronous knowledge based systems[J]. International Journal of Expert Systems, 1997, 10(2): 93-135.
[14] Rajasekhara V, Sreenatha G. Fuzzy logic implementation of proportional navigation guidance[J]. Acta Astronautica, 2000, 46(1): 17-24.
[15] ����ǿ, �Ż���, ��ҫ��, ��. ���ں�����������Ĺܵ�ú����������ϵͳ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(5): 976-980.
E Jia-qiang, ZHANG Hua-mei, WANG Yao-nan, et al. Measurement system for gas flux in pipeline based on function chain neural network[J]. Journal of Central South University: Science and Technology, 2006, 37(5): 976-980.
�ո����ڣ�2007-10-30�������ڣ�2008-01-05
������Ŀ����985���̡�����������Ŀ(���غ�[2004]1��)
ͨ�����ߣ�����ǿ(1972-)���У�������̶�ˣ���ʿ�������ڣ�����������Ϣ�ںϴ������������ڼ�⡢�Ż���ģ�������Լ���������ϵĽ�ѧ����й������绰��0731-8821750��E-mail: ejiaqiang@126.com
