
���±�ţ�1004-0609(2007)12-1973-08
Ti-6Al-4V�Ͻ����Ա����е���֯�ݱ估���λ���
���ľ�1���� ��1���ܸ���1�������2����־ǿ2
(1. ������ѧ ������ұ��ѧԺ������ 110004��
2. �����������칤���о��������� 100024)
ժ Ҫ��
920�桢Ӧ������Ϊ1��10-3��2��10-4 s-1ʱ���Բ�ͬ��ʼ�����ߴ�(2.6��6.5��16.2 ��m)��Ti-6Al-4V�Ͻ���г�����������Ρ����ù�ѧ��������羵�۲���κ������֯�������������ʼ�����ߴ�IJ�ͬ�Գ����Ա����е���֯�ݱ估���λ�������������Ӱ�졣��������о������Դֻ��������շ����������dz����Ա�����֯����Ҫ����֮һ�����ű��γ̶ȵ�����Ӧ���շ��ľ�����������������Զ���ھ�̬���������������ϸ��������(2.6��6.5 ��m)��λ���˶�Э���Ľ��滬��������ε���Ҫ���ơ������ھ����ϴֵIJ���(16.2 ��m)�����ܱ��λ����Ǿ��绬���뾧��λ���˶��Ĺ�ͬ���á����ž����ߴ�������Ծ��绬��Ϊ���ı��η�ʽ��ת���Ծ���λ���˶�Ϊ����
�ؼ��ʣ�
Ti-6Al-4V�Ͻ��������Ա����������ߴ����������������λ�����
��ͼ����ţ�TG 146.2���� ���ױ�ʶ�룺A
Microstructural evolution during superplastic deformation of Ti-6Al-4V alloy
ZHAO Wen-juan1, DING Hua1, CAO Fu-rong1, HOU Hong-liang 2, LI Zhi-qiang2
(1. School of Materials and Metallurgy, Northeastern University, Shenyang 110004, China;
2. Beijing Aeronautical Manufacturing Technology Research Institute, Beijing 100024, China)
Abstract: Superplastic tensile tests were carried out for Ti-6Al-4V alloy using different initial grain sizes (2.6, 6.5 and 16.2 ��m) at 920 �� with an initial strain rate of 1��10-3 and 2��10-4 s-1. To get an insight into the effect of grain size on microstructural evolution and superplastic deformation mechanisms, the microstructures of deformed alloy were investigated by using an optical microscope and transmission electron microscope. The results indicate that there is dramatic difference in the superplastic deformation mode of fine and coarse grained Ti-6Al-4V alloys. Grain growth is clearly observed, and strain inducing grain growth is one of the important microstructural characteristics during superplastic deformation. Moreover, grain growth induced by strain becomes dramatic with the increase of deformation, which is obviously larger than the static growth. For fine grained material, boundary sliding accommodated by dislocation motion is the main deformation mechanisms. For coarse grained material, superplastic deformation is accommodated by the mixture of grain boundary sliding and intragranular dislocation motions. It indicates a transition from boundary sliding to matrix deformation with the coarsening of grains.
Key words: Ti-6Al-4V alloy; superplastic deformation; grain size; grain growth; deformation mechanism
�����Լ������Ա�����Ϊ����Ϊ�������������������Ա�����Ϊ��һ�ֱ�������ӳ�˲��ϱ���(�绯ѧ�ɷ֡�����֯��)����������(������¶ȡ������ٶȡ����ȷ�ʽ��������С��)�ͱ��λ���(�羧�绬������ɢ��䡢�ٽᾧ��)������ص��ۺ����ã���Щ���ض�������ϼӹ����չ��̶�������Ҫ��Ӱ��[1-3]����ˣ����ź��ա�����;����DZ���������ķ�չ���Գ����Լ������о���Ӧ���ս�������ʺ��������������ӣ�ʹ���Ϊ�ִ����������е�һ�����з�չǰ�����о���Ӧ�÷�֧��
ͨ������֯�����Ե�ʵ��Ҫ����Ͼ���ϸ�ĵ��ᾧ����֯(��10 mm)������ϣ�����ϵ���֯�ڳ��ܱ����б���ϸС���ȶ��������е��о����������ܱ����в��ϵ���֯Ҫ�����仯[4]���綯̬�ٽᾧ�����ķ����볤��������ȡ����ң����ϳ�ʼ��֯�IJ�ͬҲ���ܶԳ����Ա����е���֯�ݱ����λ��Ʋ���Ӱ�죬Ȼ���ⷽ����о��в��������ˣ����������Գ����ԺϽ�Ti-6%Al-4%V(���¼��Ti-6Al-4V)Ϊ�о����۲��ʼ�����ߴ粻ͬʱ�úϽ�������������е���֯�ݱ䣬̽����ʼ�����ߴ�Գ����Ա����е���֯�ݱ��Լ����λ��Ƶ�Ӱ�����á�
1 ʵ��
����ѡ����ҵ2 mm������Ti-6Al-4V��ġ�Ϊ��ò�ͬ�����ߴ�ĵ��ᾧ����֯����920 ��ʱ�����ٽᾧ�˻��˻�ʱ��ֱ�Ϊ1��12��48 h�������Ӧ�ľ����ߴ�Ϊ2.6��6.5��16.2 ��m(���¼��Ϊ1�š�2�ź�3�Ų���)��
����ʵ����AG 250KNE�͵�������ʵ����Ͻ��У������¶�Ϊ920 �棬���ú㶨�������ٶ�1.8 mm/min��0.36 mm/min(�ֱ��൱�ڳ�ʼӦ������Ϊ 1��10-3 s-1��2��10-4 s-1)�����һ���ı�����������ˮ�㡣���������ı��ߴ�Ϊ��30 mm��15 mm��2 mm��
����OLYMPUS GX51���������۲��������κ�Ĺ�ѧ����֯��Ϊ�������ֱ�Ti-6Al-4V�Ͻ��еĦ���ͦ��࣬�������ν�ʴ���Ԧ��������ɫ(����Ϊ��ɫ)����һ�εĽ�ʴ��Ϊ3 mL HF+6 mL HNO3+100 mL H2O���ڶ��ε�Ϊ98 mL C2H2O4?2 H2O(20%����������)+2 mL HF+1 g Fe(NO3)3��������������OLYCIATM M3 ����ͼ�����ϵͳ���вⶨ������TECNAI G20��羵(TEM)�۲������֯�е�λ���;�����ò��
2 ���������
2.1 ��ѧ����֯�۲�
ͼ1��ʾΪ920 ���������˻��Ĺ�ѧ����֯����ͼ�ɼ����ٽᾧ�˻�����˽ӽ������������࣬�ʾ��ȵ���ľ�����̬�������ű���ʱ������ӣ��������Գ�����ˣ��ȴ�����õ�3�־����ߴ��Ti-6Al-4V�Ͻ��ģ��侧���ߴ�Ϊ2.6��6.5��16.2 ��m(�������������ֱ�Ϊ52.0����52.4����64.7��)���ֱ��Ϊ1�š�2�ź�3��������
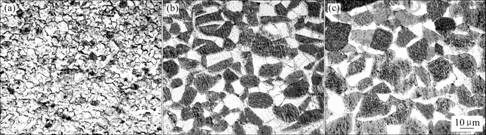
ͼ1 �˻�������֯
Fig.1 Microstructures of specimens annealed for different times: (a) 1 h(specimen 1, 2.6 ��m); (b) 12 h(specimen 2, 6.5 ��m; (c) 48 h(specimen 3, 16.2 ��m)
��920 �桢��ʼӦ������Ϊ1��10-3 s-1�ij�����������κ�1�ź�2�Ų��ϵ���֯���Դֻ�����ͼ2��ʾ����ͼ1��ȣ���������֯�侧���Ա��ֵ���״����������Ա�����50�����ң����侧���ߴ綼�������������Ti-6Al-4V�Ͻ�ij�����������У���������Ϊ����ι�������֯�ݻ��������ص�֮һ��
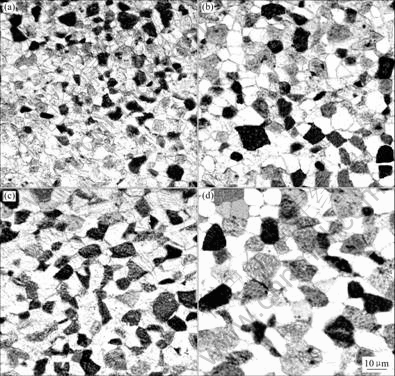
ͼ2 1�ź�2���������κ������֯
Fig.2 Microstructures of specimens 1 and 2 after superplastic deformation(920 �棬1��10-3 s-1): (a) Specimen 1, ��=40%; (b) Specimen 1, ��=140%; (c) Specimen 2, ��=80%; (d) Specimen 2, ��=156%
2.2 ��������
�����Ա��ι����еľ����ֻ������Ѿ����о����Ƿ��֣����Ѿ�ȡ����һЩ�о��ɹ��������Ͻ�Zn-22��Al[5]��Al-33��Cu[6]������Ͻ�Mg-8��Li[7]��Al-Zn-Mg[8]��һЩ�����ڳ��ܱ��ι����о������������ľ��������о������ձ���Ϊ���־����ֻ������ڱ��ι����и����µľ�̬����ͱ��������Ӧ���շ��������շ����������dz����Ա�����֯����Ҫ����֮һ�������ų����Ա����շ���������ʵ�������о������룬�о��������ϸ�������Բ���(��10 ��m)������˼��ֱ����շ������������ۡ���Clark����Ϊ��ԭ���Ǿ��绬�������Ĺ�����λ��Wilkinson����Ϊ���������ľ������˱�����Ǩ����Э����Sato��Hamilton�Ƚ�һ����չ�˱����շ�������������ۣ�����˾��鹫ʽ[5-6, 9]��Campenni��[10]��������Ծ�������Ϊ�����۴����κ;�̬����֮�͵�˼�룬���õ�����Ӧ��ģ�͡��ܸ��ٵ�[7]��Campenni��ģ�ͽ�������������ͨ��Mg-8%Li����Ͻ��ʵ�����ݵ�����֤�����о����ø�����ģ�������㡢����˫��Ti-6Al-4V�Ͻ�ij����Ծ�����������
�����˻�����еľ�̬��������[9-12]��һ��ɱ�ʾΪ

ָ��q����Ϊ2��3��4��5����ֵȡ������ɢ�����ʿ��ƻ���[9-12]��������ֵ�ֱ��ʾ��ɢ�������������Ľ���(q=2)������(q=3)������(q=4)����λ����(q=5)����ɵġ�
���ڳ����Ա����շ��ľ��������辧����λ�dz����Ա��κ;����������Ҫ����[10]��4������Ϊһ����ڣ�ÿ�λ�λ������0.55����Ӧ�䡣������������ľ���Ⱥ������ϴ��Ӧ�䡣������Ӧ���շ��ľ�����������ʽ��ʾ��
![]()
��ˣ������Ա������ܵľ�����������dD��Ϊ��̬����ͱ����շ���������֮�ͣ����Ա�ʾΪ
��һ�����õ����ٶ�ʱ�ij����Ա��ξ�������ģ��

����![]() ��q��K�ĺ�����ǰ�����ͬ����˫��Ͻ�
��q��K�ĺ�����ǰ�����ͬ����˫��Ͻ�![]() ȡΪ0.3[6]��
ȡΪ0.3[6]��
��ʽ(5)���Կ����������Ա����еľ�������������¶ȡ����γ̶��Լ�Ӧ�������������еĹ�ϵ�����ű��γ̶ȵ����������ϳ�������Ӧ�����ʵ��������ֻ��ٶȼ���������Ti-6Al-4V�Ͻ𣬸�������[8��11]��֪�侲̬��������ָ��qΪ5������̬�ľ����ֻ�����λ������ɢ���Ƶġ������˻���̵ľ�̬�����������ݼ����֪K Ϊ2.853��10-1 ��m5/s��1��������2�������ļ�������ͼ3��ʾ��ʵ���ʽ(5)����Ľ��������ģ�͵ļ���ֵ��ʵ��ֵ�Ͻӽ�����֪��ģ���ܹ��ܺõ�������Ԥ��Ti-6Al-4V�Ͻ����Ա����еľ����ֻ���ͬʱ���Կ��������Ա��γ���(��=40%~42%)��Ӧ���շ��ľ��������С�����ű��γ̶ȵ�����Ӧ���շ��ľ�����������������Զ���ھ�̬�����������������ʵ��ľ����ߴ�仯���Ǹ���ģ�ͼ���ģ���֤ʵ�˾��������ر���Ӧ���շ��ľ��������dz����Ա����е���Ҫ����֮һ�����⣬��ͼ3�л����Կ�������1��������ȣ�2�������ľ�̬�����������ԡ���������2������(6.5 ��m)�ij�ʼ�����ߴ��֮1������(2.6 ��m)��Ҫ����Ӧ�Ľ�����ҪСһЩ����̬�˻�ʱ���������������Ҳ��ӦСЩ��
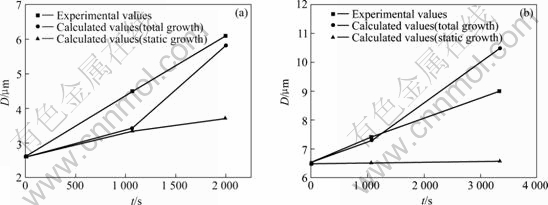
ͼ3 �����Ա����о����ߴ��ʵ��ֵ������ֵ�뾲̬�������ֵ
Fig.3 Experimental and calculated values of total grain growth, and calculated static grain growth during superplastic deformation(920�棬1��10-3 s-1): (a) Specimen 1; (b) Specimen 2
ͨ����Ϊ�����Ա����е�������֯�ֻ���һ���к������������ߴ�������Ʊ�ʹ����������Ӧ������Ӳ�����Ƶ���ǿ��Ȼ���������ߴ������ͬʱҲ�����ƿ������Ƶȵ���չ����߲��ϵĿ�������������һ���棬���ž����ֻ��̶ȵļӾ磬���ܻᷢ�����ܱ��λ��Ƶ�ת��[6, 10]����Ӿ��绬��ת��λ����䡣�ɼ�����������Գ����Ա�������˫�ص�Ӱ�죬�Ա����о����ֻ����Ƶ�̽�ֺ�Ԥ����Ե÷dz���Ҫ��ʽ(5)�ǻ��ھ�����λ��������ij����Ծ�������ģ�ͣ�ʵ��������ģ��Ԥ�����ݵ��Ǻ�˵����ģ���ǿɿ��ġ����ǣ�����˫��Ti-6Al-4V�Ͻ���˵������ı���������ͬ����ɢϵ�����ܴ������ɢ�ٶȱȦ������ɢ�ٶȴ��������������������ƶԷ��ij��������������������ƱضԺϽ�����о����ߴ�ı仯����һ��Ӱ�졣��ˣ�ʽ(5)��ʾ�ľ�������ģ�ͻ����Խ��н�һ�������������������������ص�Ӱ�����ء�
2.3 �����
��920 �桢��ʼӦ������Ϊ1��10-3 s-1ʱ����������3��Ti-6Al-4V�Ͻ�ij���������ʵ�顣��������һ��������(��)����������ˮ�㣬���Ԧ�������ֳ�����ת������֯���������������+��ת��������֯��ͼ4��ʾΪ1������(2.6 ��m)��������羵(TEM)��֯����ͼ4(a)�ɼ���������������(���)�ʻ��β�����Ť�����������绬���dz����Ա��ι����е���Ҫ���η�ʽ���������ڲ��ͦ�������ྦྷ�總����δ����λ�������Ҧ�������ྦྷ��խ��ƽֱ����ͼ4(a)��4(c)��ʾ��������ͼ4(b)��ʾ��λ���Ӧ����������緢�����༴������������Ϊλ��Դ��˵�����/����Ļ����������/�����渽��λ���Ļ��ƺ�������Э���ġ���ˣ������ƶ���Щλ�����ɽ��滬�����շ��ģ�ͬʱ���ֽ��滬�����������ڦ����������紦�������Ƿ����ڦ�������ྦྷ�紦�����⣬��ͼ4(c)��4(d)�����Կ������ι����Ц��༷���������ྦྷ�粢���Ŧ������������У����������������С�ġ��𡱣�����ʹ��ͬһ��ľ�Ⱥ���·ֲ����Ӷ�����������档�����Ti-6Al-4V�Ͻ�ij����Ա����Ц����ױ��Σ�������Ҫ�����ڦ����������硣
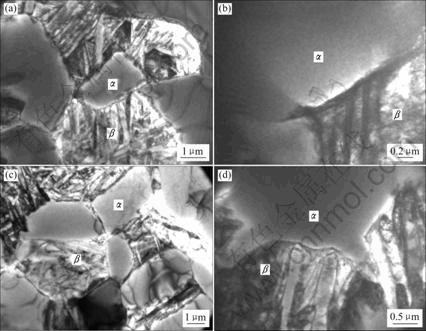
ͼ4 1������������TEM��
Fig.4 TEM images of deformed specimen 1(920 �棬1��10-3 s-1): (a), (b), (c), (d) ��=40%
ͼ5��ʾΪ2������������TEM�����������緢��Ť������(ͼ5(a))�����ι����Ц����ؾ��缷���������ྦྷ�粢�Ҧ�������֡���(ͼ5(b))��2�������ľ����ߴ�Ϊ6.5 ��m����ͼ�п��Կ���������е���֯�ݱ���1���������ơ�
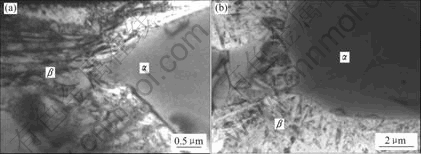
ͼ5 2������������TEM��
Fig.5 TEM images of deformed specimen 2(920 �棬1��10-3 s-1): (a) ��=42%; (b) ��=156%
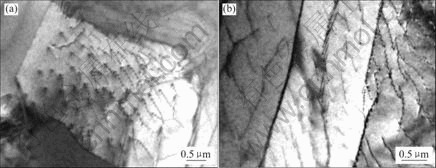
ͼ6��ʾΪ3������(16.2 ��m)������κ��TEM��֯�����ھ����ϴִ��3�������������ڦ����������總�����ִ���λ��(ͼ6(a))�������ڦ�������ྦྷ�總���ͦ������ڲ�Ҳ�����˴�����λ��(ͼ6(b))�������Բ�ͬ��1�š�2��������ͬʱ���ڦ������ڴ����Ǿ��磬�Ǿ��總���кܶ�λ������ͼ6(c)��ʾ���ɴ˿����ƶϳ����Ա��ι�����λ���˶��Ľ���γ�����λ��ǽ���ɵ��Ǿ��磬�Ǿ�����γɱ��������ϴִ��3�����������������������εĻ��������ܷ�����̬�ٽᾧ��
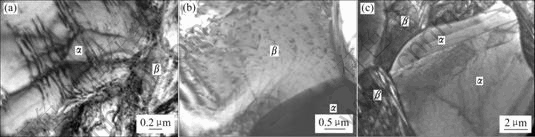
ͼ6 3������������TEM��
Fig.6 TEM images of deformed specimen 3(920 �棬1��10-3 s-1): (a), (b), (c) ��=140%
�����Ͻ�����Կ�������Ti-6Al-4V�Ͻ�ij����Ա��ι����У����ڳ�ʼ�����ߴ�IJ�ͬ���Ͻ�ı�����֯Ҳ���������IJ�֮ͬ������ʼ�����ߴ�ԸúϽ�ij����Ա���������Ҫ��Ӱ�졣���ھ�����ϸС��1�ź�2��������������������Բ����������Ť����λ������緢��������λ���˶�Э���Ľ��滬����ϸ����Ti-6Al-4V�Ͻ����Ա��ε���Ҫ���λ��ơ�ͬʱ�����˽��渽����λ�����ڦ������ڲ�����û�з���λ��������Gifkins[1-2]�ġ�о�������㡱ģ�ͺ��������ģ�ͽ�������Ϊ���IJ���(о��)�Ϳ�������(����)���ֵ���������ϸ��������ʱ�������㡱��Ϊ����Ҫ�ġ����绬�����ɾ���λ�������Ǿ��紦��������������ģ������㡱�е�λ���˶��롰о��������������ù�ϵ�����λ���˶�ֻ���ھ��缰�丽�������⣬����˫��Ͻ���������Ľṹ��ͬ����������Ҳ�в��죬����һ��Ϊ�����ࡱ(�ױ���)����һ��Ϊ��Ӳ�ࡱ(���ױ���)��ͨ����Ϊ˫��Ͻ�ij����Ա��������ֻ���ģʽ������Ӧ��ģʽ�͵�Ӧ��ģʽ[13-14]����ʵ���У�ϸ����������920 �泬���Ա����¶��£��������ڱ����Ҵֵı��η����ڦ����У�����ο���Ϊ�ǵ�Ӧ��ģʽ�ġ����ھ����ϴִ��3��������˵�����ι����в����ڦ����������總���д���λ���������ڦ������ڲ�Ҳ�����Ŵ�����λ�����������˾��绬�����⣬���ڵ�λ���˶�Ҳռ�˺ܴ�һ���ֱ����������ʱ�ij����Ա��λ��ƿ�����Ϊ�Ǿ��绬���뾧��λ���˶��Ĺ�ͬ���á�����3�������ľ����ϴ�(��10 ��m)�������Ա����У��Խ��滬��Ϊ���Ľ��������Ϊ��ת��Ϊ����ͨ���Ա������Ƶ��Ծ���λ���˶�Ϊ���ı�����Ϊ������ת������־��Ǿ����뾧����ͬʱ���ڴ���λ�����������ž����ߴ�����������ڲ�Ҳ�����˴���λ��(ͼ6(b))���Ǿ��磬˵��ϸ���������Ԧ������Ϊ���ı���ģʽҲ��ת��Ϊ���������ı���ģʽ����˿�����Ϊ3�������ı���ģʽ�ǵ�Ӧ���͵�Ӧ������ģʽ�Ļ�ϡ�
һЩѧ�߶�Ti-6Al-4V�Ͻ�����쳬���Ա���Ҳ�������о������õ��Ľ���뱾ʵ�鲻����ͬ��Kim��[15]��Ϊ���ھ����ߴ�Ϊ3 ��m��11 ��m��Ti-6Al-4V�Ͻ�(��������900 �棬1��10-3 s-1)��˵���䳬�ܱ��λ��ƾ�Ϊλ���˶�Э���Ľ��滬�������ߵ���������ǰ�ߵı�����Ҫ�����ڦ��࣬�����ߵı���ͬʱ�����ڦ�������ࡣYang��[16]��Ϊ��ʼ�����ߴ�Ϊ5 ��m��Ti-6Al-4V�Ͻ�(��������Ϊ750 �桢850 �棬1��10-5 s-1��1��10-4 s-1)���䳬���Ա�����Ҫ�����ڦ��ಢ�Ҧ�����˶�̬�ٽᾧ����ʵ���ж�1��(2.6 ��m)��3��(16.2 ��m)������������920 �桢2��10-4 s-1ʱ�ij������죬���κ��TEM����ͼ7��ͼ8��ʾ�����п��Կ�������ʱ�ı�����֯��1��10-3 s-1ʱ�ĺ����ơ�ϸ��������(1������)���ι����У�������������Բ��������������(ͼ7(a))�������ؾ��缷���������ྦྷ��(ͼ7(b))�������總��δ����λ��������Ϊ��ʱ1�����ı��λ���Ϊ���滬����������Ȼ��Ҫ�����ڦ��࣬���Ӧ������ģʽ��������ϴ־�������(3������)�ı�����֯��ò��ͼ6�����ƣ������ڳ��ִ���λ��(ͼ8(a))�����Ҧ�����Ҳ�������Ǿ���(ͼ8(b))����羵�۲�ʱ���ִ��������3�������е�λ���ܶ������Ǿ������ࡣ��ʱ��3�������ij��ܱ��λ���ҲӦΪ���滬���뾧��λ���˶��Ĺ�ͬ���ã�������λ���˶���ռ�ı�������Ҫ��һЩ���������ڴ����Ǿ���ij���Ҳ˵�����ܻᷢ����̬�ٽᾧ����ˣ�920 �泬������ʱ��Ӧ�����ʴ�1��10-3 s-1�仯��2��10-4 s-1����ͬ��ʼ�����ߴ���ϸ��Եı�����֯�ݻ�����û��̫��IJ��죬˵����ʵ���������ó��ij�ʼ�����ߴ粻ͬʱ�ij����Ա��λ����ǿɿ��ġ�
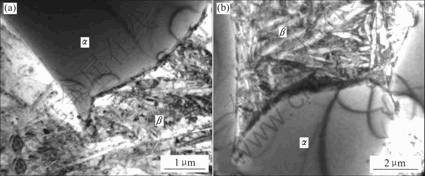
ͼ7 1������������TEM��
Fig.7 TEM images of deformed specimen 1(920 �棬2��10-4 s-1): (a), (b) ��=90%
ͼ8 3������������TEM��
Fig.8 TEM images of deformed specimen 3(920 �棬2��10-4 s-1����=140%): (a) Dislocations in �� grain; (b) Subgrains in �� grain
3 ����
1) ��ѧ����֯�۲췢�֣�Ti-6Al-4V�Ͻ��ڳ����Ա����о������Եشֻ������û��ڳ����Ծ�������Ϊ�����۴����κ;�̬����֮�͵�ģ�ͣ���Ti-6Al-4V�Ͻ�����еľ�����������˼��㣬����ֵ��ʵ��ֵ�Ͻӽ��������������������Ա��γ��ڣ�Ӧ���շ��ľ��������������С�����ű��γ̶ȵ�����Ӧ���շ��ľ����������������������Զ���ھ�̬�����������
2) ��ʼ�����ߴ�ԸúϽ�ij����Ա���������Ҫ��Ӱ�졣����ϸ��������(2.6��6.5 ��m)��λ���˶�Э���Ľ��滬��������ε���Ҫ���ƣ��һ������������ڦ����������紦�������Ƿ����ڦ�������ྦྷ�紦��������Ҫ�����ڦ���(��Ӧ��ģʽ)��
3) �ϴ־�������(16.2 ��m)�����ι����в����ڦ�/����總���д���λ���������ڦ������ڲ�Ҳ�����Ŵ�����λ������ʱ�����Ա��εĻ����Ǿ��绬���뾧��λ���˶��Ĺ�ͬ����(��Ӧ�����Ӧ������ģʽ�Ļ��)��
REFERENCES
[1] �ľŰ�, ������, ����˳, �·���, �ſ¿�, ��ҫ��. ������Ӧ�ü���[M]. ����: ��е��ҵ������, 2004: 10-14.
WEN Jiu-ba, YANG Run-lin, YANG Yong-shun, et al. Application technology of superplasticity[M]. Beijing: Chinese Machine Industry Press, 2004: 10-14.
[2] ����Ȫ. ��֯������[M]. ������: ��������ҵ��ѧ������, 1988: 15-35.
CHEN Pu-quan. Morphologic superplasticity[M]. Harbin: Harbin University Press, 1988: 15-35.
[3] �� ��, �ſ���. ���ϳ������о�����״�뷢չ[J]. �й���ɫ����ѧ��, 2004, 14(7): 1059-1067.
DING Hua, ZHANG Kai-feng. Current status and developments in superplastic studies of materials[J]. The Chinese Journal of Nonferrous Metals, 2004, 14(7): 1059-1067.
[4] Ridley N. Microstructures of superplastic materials[J]. Mater Sci Tech, 1990, 6 (11): 1145-1156.
[5] Senkov O N, Myshlyyaev M M. Grain growth in a superplastic Zn-22%Al alloy[J]. Acta Metall, 1986, 34: 97-106.
[6] Sato E, Kuribayashi K. Superplasticity and deformation induced grain growth[J]. ISIJ International, 1993, 33: 825-832.
[7] �ܸ���, �� ��, ����, �¾���. ���ܱ��ξ�������ģ�͵�������ʵ����֤[J]. ����ѧ��, 1999, 35(7): 770-772.
CAO Fu-rong, LEI Fang, CUI Jian-zhong, WEN Jing-lin. Modification of a deformation induced grain growth model of superplasticity and its experimental verification[J]. Acta Metall Sinica, 1999, 35(7): 770-772.
[8] Zelin M. Grain growth during superplastic deformation[J]. Interface Science, 2002, 10: 37-42.
[9] Richter S, Hamilton C H. Deformation enhanced grain growth in a two phase titanium alloy[J]. Mater Sci Forum, 1993, 113/115: 195-200.
[10] Campenni V D, C��ceres C H. Strain enhanced grain growth at large strains in a superplastic Zn-Al alloy[J]. Scripta Metall, 1987, 22: 359-364.
[11] ����, ������, ������. ��������Գ����Ե�Ӱ��[J]. ������ѧԺѧ��, 1988, 54(1): 6-10.
CUI Jian-zhong, WU Qing-ling, MA Long-xiang. Effect of grain growth on superplasticity[J]. Journal of Northeast University of Technology, 1988, 54(1): 6-10.
[12] Johnson C H, Richter S K, Hamilton C H, Hoyt J J. Static grain growth in a microduplex Ti-6Al-4V alloy[J]. Acta Mater, 1998, 47: 23-29.
[13] Leader J R, Neal D F, Hammond C. The effect of alloying additions on the superplastic properties of Ti-6pct Al-4pct V[J]. Metall Trans A, 1986, 17: 93-106.
[14] Meier M L, Lesuer D R, Mukherjee A K. �� Grain size and �� volume fraction aspects of the superplasticity of Ti-6Al-4V[J]. Mater Sci Eng A, 1991, 136: 71-78.
[15] Kim J S, Kim J H, Lee Y T, Park C G, Lee C S. Microstructural analysis on boundary sliding and its accommodation mode during superplastic deformation of Ti-6Al-4V alloy[J]. Mater Sci Eng A, 1999, 263: 272-280.
[16] Yang H S, Gurewitz G, Mukherjee A K. Mechanical behavior and microstructural evolution during superplastic deformation of Ti-6Al-4V[J]. Mater Trans, JIM, 1991, 32: 465-472.
������Ŀ�����Ұ�ȫ�ش�����о���Ŀ
�ո����ڣ�2007-04-25�������ڣ�2007-09-20
ͨѶ���ߣ����ľ꣬��ʿ�о������绰��024-83687746�����棺024-23906316��E-mail��zhaowenjuan80102@163.com
ժ Ҫ��920�桢Ӧ������Ϊ1��10-3��2��10-4 s-1ʱ���Բ�ͬ��ʼ�����ߴ�(2.6��6.5��16.2 ��m)��Ti-6Al-4V�Ͻ���г�����������Ρ����ù�ѧ��������羵�۲���κ������֯�������������ʼ�����ߴ�IJ�ͬ�Գ����Ա����е���֯�ݱ估���λ�������������Ӱ�졣��������о������Դֻ��������շ����������dz����Ա�����֯����Ҫ����֮һ�����ű��γ̶ȵ�����Ӧ���շ��ľ�����������������Զ���ھ�̬���������������ϸ��������(2.6��6.5 ��m)��λ���˶�Э���Ľ��滬��������ε���Ҫ���ơ������ھ����ϴֵIJ���(16.2 ��m)�����ܱ��λ����Ǿ��绬���뾧��λ���˶��Ĺ�ͬ���á����ž����ߴ�������Ծ��绬��Ϊ���ı��η�ʽ��ת���Ծ���λ���˶�Ϊ����
