
DOI: 10.11817/j.issn.1672-7207.2015.05.012
����2�ֻ�ģ���Ƶľ���任��������Ӧ���ת�ٱ�ʶ���ܶԱ�
�����1��������1��������1��������1����Ρ2
(1. �������̴�ѧ ��������ѧԺ������ �人��430033��
2. DZͧѧԺ ��������ϵ��ɽ�� �ൺ��266000)
ժ Ҫ��
��Ӧת�ٱ�ʶ�Ļ���ԭ����ʶ����������������ŵ���ȶ��������Ƶ���2�ֲ�ͬ�Ļ�ģ���ת�ٹ��Ʊ���ʽ������2�ֻ�ģ���Ƶ�ת�ٹ������ܺ�ϵͳ���ȶ��ԣ���2�ֻ�ģ�����ھ���任��������Ӧ�������ϵͳ�е�ת�ٱ�ʶ���ܽ��з����о����о�����������ڸõ���ϵͳ�У���ģ���Ʒ�����(��ת�Ӵ�������źŦż������֮��Ϊ��ģ��)���нϺõĶ�̬��Ӧ�ٶȡ���̬���ȺͿ������Ŷ������������������۷���һ�£�֤�������۷�������ȷ�Ժͷ����Ŀ����ԡ�
�ؼ��ʣ�
ģ�Ͳο�����Ӧϵͳ����ģ������ģ������ת�ٱ�ʶ����������任����
��ͼ����ţ�TM452 ���ױ�־�룺A ���±�ţ�1672-7207(2015)05-1648-07
Comparison of speed estimated performance of induction motor fed by matrix converter using two sliding model control methods
XIA Yihui1, ZHANG Xiaofeng1, QIAO Mingzhong1, LIANG Jinghui1, CAI Wei2
(1. College of Electric Engineering, Naval University of Engineering, Wuhan 430033, China;
2. College of Power Engineering, Submarine College, Qingdao 266000, China)
Abstract: The basic principle of model referenced adaptive system(MRAS) speed estimated method was analyzed. Two sliding model control(SMC) methods based on different sliding model planes were researched and the speed estimated mathematical models were derived by using Lyapunov stability method respectively. The speed estimated performances and system stability by two sliding model control methods were analyzed. The speed estimated performances of two sliding model control methods applied to induction motor fed by matrix converter were simulated. The results show that sliding model control method �� (using error signal �� and its integration as sliding model plane) has better performance in dynamic response, static speed control and anti-interference. The simulated results are consistent with theoretical analysis, verifying that the theoretical analysis is right and the proposed method is feasible.
Key words: model reference adaptive system; sliding model plane; sliding model control; speed estimated performance; matrix converter
�봫ͳ�ĵ�ѹԴ�����Դ�������ȣ�����任����������������ҡ����������ɵ���������˫������������Ԫ�����ŵ㣬��Ϊ��ǰ��Ƶ�������ټ����о���һ��������ѧ���Dz���̽���о�������任���ڹؼ��������������˲�����ơ������㷨���������Ժ�����������ٿ��Ƶ���ȡ�����ش�ɹ�[1-9]���������ٶȴ��������ٿ��Ʒ����о��Ļ���������[10-12]��Ŀǰ����Ҫ�����ٶȴ�����ת�ٱ�ʶ������ת��Ƶ�ʼ��㷨��ģ�Ͳο�����Ӧ����չ�������˲�������[13]������Щת�ٱ�ʶ�����У�����ģ�Ͳο�����Ӧ��������ԭ����������С������ʵ�ּ��ڽϴ���ٷ�Χ�ھ������õ����ܵ��ŵ㣬��Ϊ��ǰĿǰ��Ҫ���о����÷����У����������Ӧ�㷨���üĶ��������ֿ��ƣ��ܵ�������仯�����������ͱ任�������Ե�Ӱ�죬����Ĺ���ת�����ܲ�������[14]����ģ������Ϊһ������Ӧ���Ʒ��������ÿ��ؿ����㷨��ʹϵͳ��Ӧ����ƽ�������Ԥ���Ĺ켣�����ŵ������������Ƶ�ϵͳ�Բ����仯�����Ŷ����н�ǿ��³���ԡ�Ŀǰ�����ж��ֻ��ڻ�ģ���Ƶ�ģ�Ͳο�����Ӧת�ٱ�ʶ�������ڵ�������У����һ�������õĵ�������[14-20]���ڻ�ģ�����У���ģ��ѡȡ��ͬ���õ��Ĺ���ת�ٱ���ʽ����ת������Ҳ����ͬ��Ϊ�ˣ��������߶�2�ֲ�ͬ��ģ���µĻ��ڻ�ģ���Ƶ�ģ�Ͳο�����Ӧת�ٱ�ʶ����չ���˶Ա��о���������2�ֻ�ģ���Ƶ�ת�ٱ�ʶ���ܺ�ϵͳ���ȶ��ԣ�����һ����任��������Ӧ�������ϵͳ�н��з����о���
1 ģ�Ͳο�ת�ٱ�ʶԭ��
�����Ӧ��������ྲֹ����ϵ����ѧģ��Ϊ
 (1)
(1)
���У���s���ͦ�s���ֱ�Ϊ���Ӧ�������ͦ����������r���ͦ�r���ֱ�Ϊ���Ӧ�������ͦ��������ir����is���ֱ�Ϊ���Ӧ�������ͦ��������ir����ir���ֱ�Ϊ���Ӧ�������ͦ��������R��r�ͦ�r�ֱ�Ϊ���ӵ��衢ת�ӵ����ת����ת�ٶȡ�
���Ӵ�����ת�Ӵ���Ϊ
 (2)
(2)
���У�Ls��Lm��Lr�ֱ�Ϊ���ӵ�С����ŵ�к�ת�ӵ�С���ʽ(1)��ʽ(2)�ɵ�ת�Ӳο�������ת�ӹ��ƴ����ֱ�Ϊʽ(3)��ʽ(4)��
 (3)
(3)
 (4)
(4)
ͼ1��ʾΪģ�Ͳο�����Ӧϵͳת�ٱ�ʶԭ��ͼ������ԭ��Ϊ��ͨ�����ϵ�����������źŦţ�ʹ�ù��ƴ������ڲο���������ʱ����ת�ټ�Ϊ���ʵ��ת�٣�����̬ʱ����=0�� ��
�� ��
�� ��
��
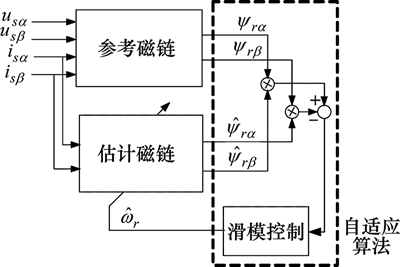
ͼ1 ģ�Ͳο�����Ӧϵͳת�ٹ���ԭ��ͼ
Fig. 1 Chart of model referenced adaptive system speed estimated principle
2 ���ڲ�ͬ��ģ��Ļ�ģ����ת�ٱ�ʶ
����SMC-MRASת�ٱ�ʶ�Ļ���˼��Ϊ��ͨ����ģ��ṹ�����������ת�٣�ʹ��ϵͳ�ܹ������ȶ�������ģ�棬��ϵͳ�����ȶ��ڻ�ģ��ʱ��ת�ӹ��ƴ������ڲο�����������ת�ټ�Ϊʵ��ת�١�
2.1 ��ģ���Ʒ�����
��ת�Ӵ�������źŦŶ���Ϊ��ģ�棬����
 (5)
(5)
���У� ������ģ��s1=0ʱ����=0��ת�ӹ��ƴ������ڲο�����������ת�ټ�Ϊʵ��ת�١�
������ģ��s1=0ʱ����=0��ת�ӹ��ƴ������ڲο�����������ת�ټ�Ϊʵ��ת�١�
����������ŵ����Ϊ
 (6)
(6)
��������ŵ���ȶ��Կ�֪��ϵͳҪ���뻬ģ��������㵽��������
 ��0 (7)
��0 (7)
��ʽ(5)�ɵã�
 (8)
(8)
��ʽ(3)��(4)����ʽ(8)�ã�
 (9)
(9)
���� ��
��

 ��
��
��ʽ(9)����ʽ(7)��ɵã�
 (10)
(10)
����f2��0��һ������һ��ʵ��M������
 (11)
(11)
���У���s1��0��sign(s1)=1��s1��0��sign(s1)=-1��s1=0��sign(s1)=0��ʽ(11)һ������ʽ(7)������ʹϵͳ�����ܹ�����ģ�棬ʽ(11)��Ϊ����ת�ٱ���ʽ����ϵͳ���뻬ģ�棬 ����ʽ(8)������ɵã�
����ʽ(8)������ɵã�
 (12)
(12)
��ʽ(11)��ʽ(12)��֪����ת�ӹ��ƴ�������ʵ�ʴ���ʱ������ת�ټ�Ϊʵ��ת�٣�����ת��Ϊ��ģ�����ɢ���������Ƶ������Ϊʵ�ʹ���ת�١�
2.2 ��ģ���Ʒ�����
ѡȡת�Ӵ�������źŦź������֮����Ϊ��ģ�棺
 (13)
(13)
ʽ�У�kΪϵ����k��0��
����������ŵ����Ϊ
 (14)
(14)
ͬ����������ŵ���ȶ��Կ�֪��ϵͳҪ���뻬ģ״̬�������㵽��������
 ��0 (15)
��0 (15)
��ʽ(13)�ɵã�
 (16)
(16)
��ʽ(3)��ʽ(4)����ʽ(16)��ã�
 (17)
(17)
����

 ��
��
 ��
��
��ʽ(17)����ʽ(15)�ã�
 ��0 (18)
��0 (18)
ʽ(18)���Խ�һ���ȼ�Ϊ��
 (19)
(19)
����f4��0��һ������һ��ʵ��N����
 (20)
(20)
����ʽ(15)�������伴Ϊ���õ�2�ֻ�ģ��ʱ�Ĺ���ת�ٱ���ʽ��ͬ�������ڹ���ת��Ϊ��ģ�����ɢ���������Ƶ������Ϊ�������ת�١�
3 ����2�ֻ�ģ���Ƶ�ת�ٱ�ʶ���ܷ���
3.1 ת�ٹ������ܷ���
��ϵͳ���뻬��ģ̬����ʱ�����ڻ�ģ���Ʒ�����ʽ(11)����ʽ(9)��ã�
 (21)
(21)
��ʽ(21)��֪����s1��0�� ��0����s1��0����0��Ҳ����˵��ϵͳ���ڻ�ģ����ʱ��ת�Ӵ�������źŦŽ���Mf2�������������ģ�档Ϊȷ��ϵͳ�ȶ������нϿ��ת�ٹ�����Ӧ��M����Ϊһ�㹻���ʵ�������ϴ��M�Ʊػ���ɦŲ����Ƚϴ�ת�ӹ��ƴ������ٲο��������Ƚ��ͣ����ڵ����������أ�����г�������������ʵ�ʵ��ת�������Ƚϴ���ˣ�MѡȡʱӦ���ϵͳ�ȶ��ԺͶ���̬���ܡ�
��0����s1��0����0��Ҳ����˵��ϵͳ���ڻ�ģ����ʱ��ת�Ӵ�������źŦŽ���Mf2�������������ģ�档Ϊȷ��ϵͳ�ȶ������нϿ��ת�ٹ�����Ӧ��M����Ϊһ�㹻���ʵ�������ϴ��M�Ʊػ���ɦŲ����Ƚϴ�ת�ӹ��ƴ������ٲο��������Ƚ��ͣ����ڵ����������أ�����г�������������ʵ�ʵ��ת�������Ƚϴ���ˣ�MѡȡʱӦ���ϵͳ�ȶ��ԺͶ���̬���ܡ�
���ڻ�ģ���Ʒ�����ʽ(20)����ʽ(17)��ã�
 (22)
(22)
ͬ������ʽ(22)��֪����s2��0�� ��0����s2��0����0��˵����ģ��Ļ�����ȷ����ϵͳת�ٹ��ƾ��нϿ�Ķ�̬��Ӧ���ܣ���ʱֻ���С��ʵ��N�����ȶ��ԣ�ϵͳ�Ϳɾ��нϺõ�ת�ٹ��ƶ���̬���ܡ�
��0����s2��0����0��˵����ģ��Ļ�����ȷ����ϵͳת�ٹ��ƾ��нϿ�Ķ�̬��Ӧ���ܣ���ʱֻ���С��ʵ��N�����ȶ��ԣ�ϵͳ�Ϳɾ��нϺõ�ת�ٹ��ƶ���̬���ܡ�
ͨ��MΪһ�dz������ʵ����NΪһ�dz�С����ʵ������ת�Ӵ�������źŦ���̬ʱҲ�Ƿdz�С����ˣ�����ת�Ӵ�������źŦŶ�̬�仯����ģ���Ʒ�����Ҫ���ڻ�ģ���Ʒ�����ģ���ƶ����и��õ�ת�ٹ�����̬���ܡ�
3.2 ϵͳ�ȶ��Է���
��ϵͳ���뻬��ģ̬����ʱ�����ڵ�2�ֻ�ģ���ƣ���ʽ(20)����ʽ(17)��ã�
 (23)
(23)
��ʽ(21)��(23)��֪����2�ֻ�ģ���ƶ����ڻ�ģ����ʱ��ϵͳ���ֱ���Mf2��Nf4����������ģ�棬��֤ϵͳ��Ӧ��ÿ���л�ʱ�̶��ܴ�Խ��ģ�档ͬʱMf2��Nf4��ӳ��2�ֻ�ģ�����ڸ��Ի�ģ��Ķ����̶ȣ���ֵԽС��ϵͳ���Ŷ�����Խǿ���ȶ���Խǿ����ֵԽ��ϵͳ���Ŷ�����Խ�����ȶ���Խ����
4 �����о�
Ϊ����֤���Ķ�2�ֻ��ڻ�ģ���Ƶ�ģ�Ͳο�����Ӧת�ٱ�ʶ�������ܷ�������ȷ�ԣ���������ʸ����������Ӧ���ھ���任��������Ӧ�������ϵͳ���з�����֤������������ü���1��
ͼ2��ʾΪ���ʸ������Ӧ���ھ���任��������Ӧ���ԭ��ͼ��ͼ3��ͼ4��ʾ�ֱ�Ϊ����2�ֻ�ģ���Ƹ���ͻ��(TL=1 N��m2)ʱ���ת�١�ת�Ӵ�������źŦźͶ���A��������Ρ�
��1 �������
Table 1 Emulated parameters

����ͻ��ǰ����ͼ3��֪���ڻ�ģ���Ʒ����������£�ת��Ϊ100 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ130 ms��8%��20%��ת��Ϊ300 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ330 ms��4%��26.7%��ת��Ϊ600 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ750 ms��3.5%��12.5%����ͼ4��֪���ڻ�ģ���Ʒ����������£�ת��Ϊ100 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ133 ms��5%��8%��ת��Ϊ300 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ290 ms��2%��5%��ת��Ϊ600 r/minʱ����Ӧ�ķ�ֵʱ�䡢��̬���Ⱥͳ������ֱ�Ϊ450 ms��3%��6%��
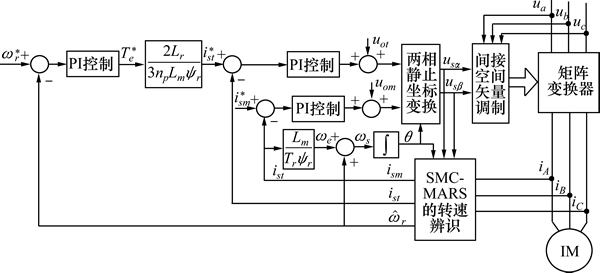
ͼ2 ���ʸ���������ھ���任��������Ӧ���ԭ��ͼ
Fig. 2 Principal chart of indirect vector control applying to an induction motor fed by matrix converter
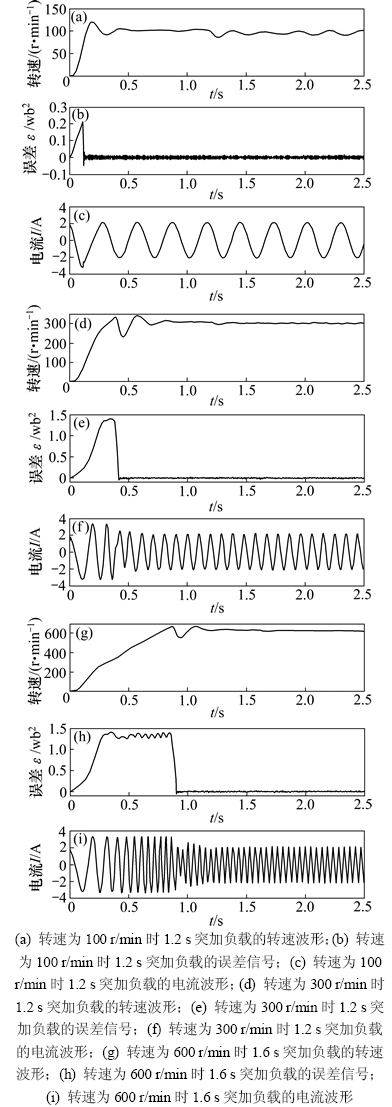
ͼ3 ���û�ģ���Ʒ�����ʱ���ת�ٺ�ת�Ӵ�������źźͶ���A���������
Fig. 3 Waveforms of rotor speed and flux error signal and stator A-phase current with sliding model control method one
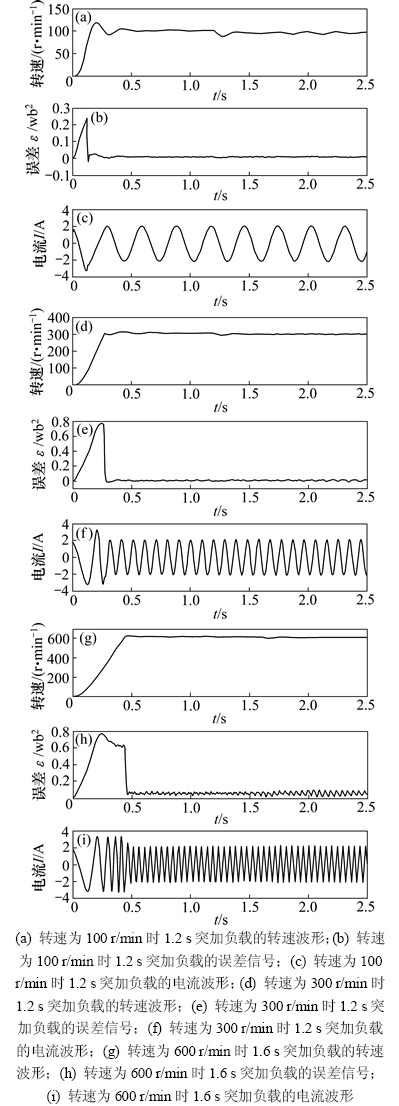
ͼ4 ���û�ģ���Ʒ�����ʱ���ת�ٺ�ת�Ӵ�������źźͶ���A���������
Fig.4 Waveforms of rotor speed and flux error signal and stator A-phase current with sliding model control method two
���������ݿ�֪�����û�ģ���Ʒ�������и��õĶ�̬��Ӧ�ٶȺ���̬���ھ��ȣ���ԭ��Ϊ����ģ���Ʒ���������ʱ��ת�Ӵ������ű仯�ȽϿ죬��ģ�涶��Ƶ�ʸߣ�ת�Ӵ����۲Ⲩ�����ȵͣ������������ת�ٸ���ʵ��ת�����ܲ���ӵ����������䣬����г�������ϴ���г������������г��ת����ʹʵ��ת�ٲ����Ƚϴ�ģ���Ʒ����������£�ת�Ӵ������ű仯�ϻ�������ģ�涶��Ƶ�ʵͣ�ת�Ӵ��������̬�������ܽϺã��������¶��ӵ���г��������С�����������ת�ٲ����Ƚ�С��ʹ�ù���ת���ܹ��ܺõĸ���ʵ��ת�١���ʽ(21)~(23)��֪����M=280��k=1 200��N=30ʱ����ģ���Ʒ�����Ȼ�ģ���Ʒ�������и���Ħű仯�����뻬ģ�涶���������������۷���һ�¡���ˣ���������֤�˶�2�ֻ�ģ���Ƶ�ת�ٱ�ʶ���ܷ�������ȷ�ġ�
ͻ�Ӹ��غ���ͼ3��֪���ڻ�ģ���Ʒ����������£�ת��Ϊ100 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ30 r/min���ȶ���ת��Ϊ80 r/min��ת��Ϊ300 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ20 r/min���ȶ���ת��Ϊ308 r/min��ת��Ϊ600 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ28 r/min���ȶ���ת��Ϊ630 r/min����ͼ4��֪���ڻ�ģ���Ʒ����������£�ת��Ϊ100 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ25 r/min���ȶ���ת��Ϊ85 r/min��ת��Ϊ300 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ15 r/min���ȶ���ת��Ϊ305 r/min��ת��Ϊ600 r/minͻ�Ӹ��غ�ת�ٵ�����Ϊ20 r/min���ȶ���ת��Ϊ618 r/min��
�����Ͽ�֪����ģ���Ʒ�������и��õĿ������Ŷ���������̬������������ڻ�ģ���Ʒ���������ʱ����ģ�涶��Ƶ�ʱȽϸߣ���Ȼ���Կ�����Ӧ���ص��Ŷ�������ģ���л�����ʹ����̬ʱת�ٲ����Ƚϴ���̬���ȵͣ���ģ���Ʒ���������ʱ����ģ��Ƚ�ƽ�����л�Ƶ�ʲ��Ǻܸߣ�ʹ��ϵͳ����ת�ٲ����Ƚ�С������ϵͳ��̬���ȸߡ���ˣ���������������ģ���Ʒ�������и��õĿ������Ŷ���������̬���ٽ����
5 ����
1) ���ڻ�ģ���Ʒ������ģ�Ͳο�����Ӧת�ٱ�ʶ�������и��õĶ�̬���ܡ���̬���ȺͿ������Ŷ�������
2) ����SMC-MRAS��ת�ٱ�ʶ����Ӧ���ھ���任��������Ӧ����������ٶȴ��������ٿ�������ʵ���еġ�
3) ��������֤�˶�2�ֻ�ģ���Ƶ�ת�ٱ�ʶ���������������еķ�������ȷ�ġ�
�ο����ף�
[1] �■, �ܴ���, ÷��. ����ʽ�任����������Ӧ��[M]. ����: ��е��ҵ������. 2007: 15-35.
SUN Kai, ZHOU Daning, MEI Yang. Technology and its application of matrix converter[M]. Beijing: China Machine Press, 2007: 15-35.
[2] Helle L, Larsen K B, Jorgensen A H, et al. Evaluation of modulation schemes for three-phase to three-phase matrix converters[J]. IEEE Transactions Industry Electronics, 2004, 51(1): 158-171.
[3] ����, �ܺ���, �α�, ��. ����任���ĵ�ѹ��������������[J]. �й��������ѧ��, 2009, 29(30): 36-41.
LIN Hua, SHE Hongwu, HE Bi, et al. Two-step commutation strategies for matrix converter[J]. Proceedings of the CSEE, 2009, 29(3): 36-41.
[4] ������, �α�, ����, ��. ����任����һ�ְ�ȫ��������[J]. �й��������ѧ��, 2008, 28(18): 12-17.
ZHANG Xiaofeng, HE Bi, LIN Hua, et al. Safe commutation strategies for matrix converter[J]. Proceedings of the CSEE, 2008, 28(18): 12-17.
[5] �α�, ����, ������, ��. ���������;���任�����ƹ�ģ��ѹ���Ʋ���[J]. �й��������ѧ��, 2007, 27(25): 90-96.
HE Bi, LIN Hua, ZHANG Xiaofeng, et al. A modulation strategy to reduce common-mode voltage for current-controlled matrix converters[J]. Proceedings of the CSEE, 2007, 27(25): 90-96.
[6] Casadei D, Serra G, Tani A, et al. Optimal use of zero vectors for minimizing the output current distortion in matrix converters[J]. IEEE Transactions Industrial Electronics, 2009, 56(2): 326-336.
[7] WANG JIacheng, WU Bin, XU Dewei. Multimodular matrix coverters with sinusoidal input and output waveforms[J]. IEEE Transaction on Industrial Electronics, 2012, 59(1): 17-27.
[8] Kim S, Yoon Y D, Sul S K. Pulsewidth modulation method of matrix converters for reducing output current ripple[J]. IEEE Transaction on Power Electronics, 2010, 25(10): 2610-2629.
[9] WANG Jingxin, JIANG Jianguo. Combining the principles of variable structure direct torque control and space vector modulation for induction motor fed by matrix converter[J]. Bulletin of the Polish Academy of Sciences Technical Sciences, 2010, 58(4): 657-663.
[10] ������, ������. ���ڴų�����ľ���任��������Ӧ�����ṹֱ��ת�ؿ���[J]. �й��������ѧ��, 2010, 30(6): 57-62.
WANG Jingxin, JIANG Jianguo. Variable-structure DTC control for induction motor driven by a matrix converter based on field oriented[J]. Proceedings of the CSEE, 2010, 30(6): 57-62.
[11] Lee K B, Blaabjerg F. Sensorless DTC-SVM for induction motor driven by a matrix converter using a parameter estimation strategy[J]. IEEE Transactions on Industrial Electronics, 2008, 55(2): 512-522.
[12] ������, ������. ����任��������Ӧ���ת�غ�ת�Ӵ�������[J]. ��������ѧ��, 2007, 14(7): 59-65.
WANG Jingxin, JIANG Jianguo. Torque and rotor flux control for induction motor fed by matrix converter[J]. Electric Machines and Control, 2007, 14(7): 59-65.
[13] ����Ԫ, �ļӿ�, ���, ��. ����ִ����Ƽ���[M]. ����: ��е��ҵ������, 2007: 45-65.
WANG Chenyuan, XIA Jiakuan, YANG Junyou, et al. Modern control technology for motor[M]. Beijing: China Machine Press, 2007: 45-65.
[14] Gadoue S M, Giaouris D, Finch J W. MARS sensorless vector control of an induction motor using new sliding-mode and fuzzy-logic adaptation mechanism[J]. IEEE Transaction on Energy Conversion, 2010, 25(2): 394-402.
[15] ������, ������. ����Ԥ���㷨�ͱ�ṹ�ľ���任��������Ӧ�������ֱ��ת�ؿ���[J]. �й��������ѧ��, 2010, 30(33): 65-70.
WANG Jingxin, JIANG Jianguo. A deadbeat DTC control strategy with prediction algorithm and variable structure controller for induction motor driven by matrix converter[J]. Proceedings of the CSEE, 2010, 30(33): 65-70.
[16] ·ǿ, ����, ����¡, ��. һ�����ڸ�Ӧ������Ƶ����ͻ�ģ�ٶȹ۲����о�[J]. �й��������ѧ��, 2006, 26(18): 164-168.
LU Qiang, SHEN Chuanwen, JI Xiaolong, et al. A novel sliding-model observer for speed-sensorless induction motors[J]. Proceedings of the CSEE, 2006, 26(18): 164-168.
[17] Stefano D G, Jorge R D, Marco A M. Sensorless high order sliding mode control of induction motors with core loss[J]. IEEE Transactions on Industrial Electronics, 2014, 61(6): 2678-2689.
[18] ʷ����, ����. ��Ӧ����߽��ն˻�ģ�����۲������о�[J]. �Զ���ѧ��, 2012, 38(2): 288-294.
SHI Hongyu, FENG Yong. High-order terminal sliding mode flux observer for induction motors[J]. Acta Automatica Sinica, 2012, 38(2): 288-294.
[19] ����, ������. ��Ӧ���������-��ģ�۲���������ʶ����[J]. ��������ѧ��, 2011, 15(8): 93-100.
LIU Yan, QI Xiaoyan. An Luenberger-sliding mode observer parameter identification for induction motors[J]. Electric Machines and Control, 2011, 15(8): 93-100.
[20] Pinto S, Silva J. Sliding mode direct control of matrix converters[J]. IET Electronics Power, 2007, 1(3): 439-448.
(�༭ �Կ�)
�ո����ڣ�2014-04-04�������ڣ�2014-07-17
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51007094��512771777) (Projects(51007094, 512771777) supported by the National Natural Science Foundation of China)
ͨ�����ߣ������ң����ڣ���ʿ����ʦ�����µ�����������������о���E-mail: xiayihui2005@163.com
ժҪ���о�ģ�Ͳο�����Ӧת�ٱ�ʶ�Ļ���ԭ����ʶ����������������ŵ���ȶ��������Ƶ���2�ֲ�ͬ�Ļ�ģ���ת�ٹ��Ʊ���ʽ������2�ֻ�ģ���Ƶ�ת�ٹ������ܺ�ϵͳ���ȶ��ԣ���2�ֻ�ģ�����ھ���任��������Ӧ�������ϵͳ�е�ת�ٱ�ʶ���ܽ��з����о����о�����������ڸõ���ϵͳ�У���ģ���Ʒ�����(��ת�Ӵ�������źŦż������֮��Ϊ��ģ��)���нϺõĶ�̬��Ӧ�ٶȡ���̬���ȺͿ������Ŷ������������������۷���һ�£�֤�������۷�������ȷ�Ժͷ����Ŀ����ԡ�
[1] �■, �ܴ���, ÷��. ����ʽ�任����������Ӧ��[M]. ����: ��е��ҵ������. 2007: 15-35.
[3] ����, �ܺ���, �α�, ��. ����任���ĵ�ѹ��������������[J]. �й��������ѧ��, 2009, 29(30): 36-41.
[4] ������, �α�, ����, ��. ����任����һ�ְ�ȫ��������[J]. �й��������ѧ��, 2008, 28(18): 12-17.
[5] �α�, ����, ������, ��. ���������;���任�����ƹ�ģ��ѹ���Ʋ���[J]. �й��������ѧ��, 2007, 27(25): 90-96.
[10] ������, ������. ���ڴų�����ľ���任��������Ӧ�����ṹֱ��ת�ؿ���[J]. �й��������ѧ��, 2010, 30(6): 57-62.
[12] ������, ������. ����任��������Ӧ���ת�غ�ת�Ӵ�������[J]. ��������ѧ��, 2007, 14(7): 59-65.
[13] ����Ԫ, �ļӿ�, ���, ��. ����ִ����Ƽ���[M]. ����: ��е��ҵ������, 2007: 45-65.
[18] ʷ����, ����. ��Ӧ����߽��ն˻�ģ�����۲������о�[J]. �Զ���ѧ��, 2012, 38(2): 288-294.
[19] ����, ������. ��Ӧ���������-��ģ�۲���������ʶ����[J]. ��������ѧ��, 2011, 15(8): 93-100.
