
DOI��10.19476/j.ysxb.1004.0609.2017.03.017
����Ƶ�����ŷ�����̬��ת����������̬У���㷨
�� ��1, 2 , ������1, 2 , �� ��1, 3, ������1, 3
(1. �й���ѧԺ ��ŷ�����̽�⼼���ص�ʵ���ң����� 100190��
2. �й���ѧԺ��ѧ������ 100049��
3. �й���ѧԺ ����ѧ�о��������� 100190)
ժ Ҫ��
���ڴ�ż���ӵĺ���Ƶ�����ŷ������ڷ���̽��Ĺ����У����ڵ�����̬�ǵı仯��ʹ���շ���Ȧ����֮�����Ϸ����仯���Ӷ�������̬�����������Դ�IJ�ͬ�����Խ���̬����Ϊ���������λ��������֡�Ϊ��������̬����Ӱ�죬���ڲ�״���ģ�ͣ������Ƶ��õ����ᷢ�䡢���������Ȧ�ܹ��µĵ��������̬��ת���������ٻ����ص�ż����ģ�ͣ��Ƶ��õ����շ����Ǽ������ǵ�����ֵ������ʵ�ֲ�����λ������У�����봫ͳ����̬У���㷨��ȣ�����������̬���У���㷨����������յ���̬����Ϣ���ɷ�������֪������������̬У���㷨����ʵ�ִ�ͳ��̬У���㷨��3�ֳ�����Ȧ�ܹ��е�У��Ч�����ڳ�����H����K��������ģ���£�У��������������С��0.1%���Ӷ���֤�˲�������̬У���㷨�Ŀ����ԡ�
�ؼ��ʣ�
����Ƶ�����ŷ�����̬����������������̬��ת���������ص�ż����ģ����
���±�ţ�1004-0609(2017)-03-0582-12���� ��ͼ����ţ�P319.1���� ���ױ�־�룺A
Ƶ�����ŷ����ڵ���������ſ�̽������һ�֣������ʱ�����ŷ������в��ܹض�ʱ��Ӱ�졢����ȸߵ��ŵ㣬��dz�ر�̽�ⷽ����н�ǿ�����ƣ�Ŀǰ�ѱ��㷺Ӧ���ڵ����ղ顢������̽�����š����е��¹ܵ�̽����������ڴ�ż���ӵ�Ƶ�ʵ�ŷ��Ļ�������ԭ��Ϊ��������Ȧ�Բ�����ϳɷ�ʽ�����ض�Ƶ�ʵĴų��ź�(��һ�γ�)��������ػ������쳣�����ò�����Ӧ����������������ͬƵ�ʵĴų��ź�(�����γ�)����ͨ������������Ȧ���յ��Ķ��γ��źţ���ʵ�ֶԴ�ص����ʻ�����쳣���̽��[1]�����ղ���ԭ���IJ�ͬ��Ƶ�����ŷ���̽���Է�Ϊ���β���(Geometrical sounding)��Ƶ�ʲ���(Frequency sounding)����[2]��������Ƶ�����ŷ�����������Ƶ�ʲ���ķ�ʽ������ڵ����Ƶ�����ŷ�����������п��١���Ч�������̽������ơ�Ŀǰ����ҵ���ĺ���Ƶ�����ŷ������м��ô�Fugro��˾��DIGHEMϵͳ[3-4]��RESOLVEϵͳ[5]�Լ�����Geophex��˾��GEM-2Aϵͳ[6]�ȡ�
���ڴ�ż���ӵĺ���Ƶ�����ŷ��������շ���Ȧ֮����ø������ӣ������ɷ����ڵ���֮��[3, 5-6]���ڲ��߷��еĹ����У����ڷ����ٶȡ��ɻ����������١���������ص�Ӱ�죬ʹ���շ���Ȧ�������֮�����Ϸ����仯�Ӷ�������̬��Ŀǰ�Ժ���Ƶ�����ŷ������е����˶������Լ���̬�仯�Ե����ӦӰ�������о������Ѿ�ȡ����һЩ�ɹ���SON[7]��WON��[8]�ڽ���ˮ��̽������ʱ���������̬�ǵı仯��Ժ��յ�Ų������ݲ���Ӱ�죻DESZCZ-PAN��[9]��FRASER[10]�Ե��յĻζ��ں��յ�Ų������ݷ��ݽ���в��������������о���HOLLADAY��[11]�о��˵��յ���̬�仯�Ը߶Ȳ����Լ��������̽�������Ӱ�죻2006�꣬DAVIS��[12-13]����˵������ŵ�����ɻ����ӵ�Ļζ�ģ�ͣ������յ��˶���Ϊ����(In-line)�˶��Լ�����(Cross-line)�˶������ֱ��о��������˶��������Լ��߶ȱ仯�Ե����Ӧ��Ӱ�죬����2009������˻�����������GPS���ߵĵ����˶�Ԥ��ģ�͡�������̬�����Դ�IJ�ͬ�����о�����̬����Ϊ���շ���Ȧ����仯����ķ�������Լ��շ���Ȧλ�ñ仯�����λ����YIN��FRASER[14]��2004����������˻����ص�ż����ģ�͵���̬У���㷨��ͨ���Ƶ����Ĵ�ֱ����(Vertical coaxial����VCA)����ֱ����(Vertical coplanar����VCP)�Լ�ˮƽ����(Horizontal coplanar����HCP)3�ֳ�����Ȧ�ܹ�������̬����תʱ�ĵ����Ӧϵ���������ò�õ���̬����Ϣʵ����̬����У���������㷨��У���˷�������δ��λ��������У����2014�����ܰ��[15]ͬ�������ص�ż����ģ�ͣ��ֱ�����˷�����λ������Ӱ�죬�Ƶ��õ�����̬�仯�����Ӧ���뷽���λ�õ����仯ʱ�����Ӧ�ȵij˻����Ƴɹ̶�������ϵ�Ľ��ۣ���ͨ����õ���̬����Ϣʵ�ֶ���̬����У����������ʱ������ϵͳ����̬���У����2010�����յ�[16]ͬ�������ص�ż����ģ�ͶԻ���ֱ�����ĺ���ʱ�����ŷ����Ļ�����Ȧ������̬�DZ仯�����ķ�����������У����2013��������[17]�����ط���������̬�Ƿ����仯������£��̶���ʱ���յ����Ӧϵ��������Ҳͬ������������λ�����������˻��ڵ����Ӧϵ����ϵͳ��̬����У������������У��������Ч����߷��ݾ��ȣ����ں���ʱ������ϵͳ����̬У�����DZ��������о��ص㣬���ﲻ����ϸ������
����3�ֳ�����Ȧ�ܹ��շ���Ȧ������̬����תʱ�ĵ����Ӧϵ���а����е��յ���̬����Ϣ����ͳ����̬���У���㷨����Ҫ�������յ���̬����Ϣ������Ҫ����ϵͳ��̬����Ϣ��ͬ�����еĴ��ݶ�������̬��ת�����������Ƶ��Ĺ����в�����̬����ת��������ԣ�ͨ����ô��ݶ���������ı������̣�ʵ���˶�ϵͳ��̬����Ϣ������[18]����֪���ݶ�������̬��ת���������в�����̬���Ӱ�������[19-21]���Ӷ�������Ҫ�����κε���̬����Ϣ��ͬʱҲ�����������ƣ����ܹ��ܺõع��ճ���Դ�߽硢�ϴ��ܳ����õ����ֳ�Դ�Լ��ܹ���ӳ��Դ��ĴŻ���Ǻ�ƫ�ǵ�[18, 22-23]�����⣬��ص�Ų��(MT)�����Ͻ�����Ҳ�����˴�ص���迹������ת������������7���Ƕ�����[24-25]����ͨ����ת�����������룬���Դ���С�������Ź��츴���Ե����Ӷ���Ҫ���͵IJ������ܹ�����ѹ�ƻ�ƽ�����ھ�̬ЧӦ���������������������š������˲�����λ��Ӱ�����������ݵĽ��;���[24-27]�����Ƶأ��ڲ�״���ģ���£����о����������ݳ�9����Ȧ�ܹ�(��ͼ1��ʾ)�µĶ��γ����ֺ���������������̬����ת�������ã���Ӧ���Ƶ��õ����ᷢ�䡢���������Ȧ�ܹ��µĵ��������̬��ת������(���¼�Ʋ�����)���ò������ķ���������HCP��Ȧ�ܹ��µĶ��γ������շ���Ȧ������仯�أ����Է��������С�������շ���(�շ���Ȧ���ˮƽ����)���߶ȱ仯�����λ������һ����������ص�ż����ģ�͵IJ�����λ�����У���㷨�����㷨�봫ͳ����̬У���㷨��ͬ������������̬���У���㷨������Ҫ�������յ���̬����Ϣ�������������̬����У��Ч���봫ͳ��̬У���㷨��3�ֳ�����Ȧ�ܹ��е�У��Ч�����бȽϣ����ڳ�����H�ͼ�K��������ģ���£���һ����֤���㷨�Ŀ����ԡ�
1 �����������ģ��
��֪���ڴ�ż���ӵĺ���Ƶ�����ŷ��������շ���Ȧ�ֱ�ȡx��y��z���������£����Եõ�9�ֵ���Ȧ�ܹ�[28]����ͼ1��ʾ�����д��ڶԽ����ϵ�3����Ȧ�ܹ���Ϊ���ã��ֱ�ΪVCA��VCP�Լ�HCP����Ȧ�ܹ�����HCP��Ȧ�ܹ�������״�Ĵ��ģ��Ϊ������ͼ2��ʾ���Է�����Ȧ������z�᷽��Ĵ������صĽ���Ϊ����ԭ�㣬�շ���Ȧ��x����ֲ�����֪������Ȧ������Ϊ(0��0��zt)��������Ȧ������Ϊ(xr��yr��zr)��
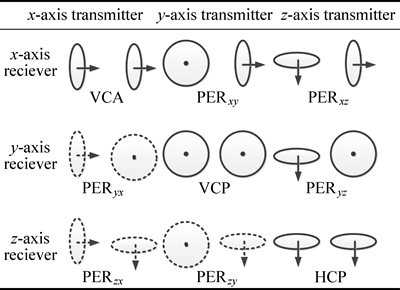
ͼ1 Ƶ�����ŷ�������9����Ȧ�ṹװ��
Fig. 1 Nine configurations of frequency domain electromagnetic instruments
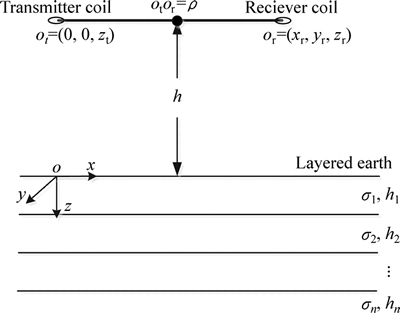
ͼ2 HCP��Ȧ�ܹ�������״���ģ��ʾ��ͼ
Fig. 2 Schematic diagram of HCP configuration measuring layered earth
���ڲ�״�Ĵ��ģ�ͣ������ݳ�9����Ȧ�ܹ��¶��γ��ĸ��ֺ�����������GS [14, 29]��
 (1)
(1)



 (2)
(2)


 (3)
(3)
ʽ�У� �ֱ��Ӧ��9����Ȧ�ܹ��¶��γ��ĸ��ֺ�������ʾb����ķ��䣬a����Ľ��գ�
�ֱ��Ӧ��9����Ȧ�ܹ��¶��γ��ĸ��ֺ�������ʾb����ķ��䣬a����Ľ��գ� ��
�� Ϊ�շ��ࣻ
Ϊ�շ��ࣻ �ֱ�Ϊ��һ��i�ױ�����������
�ֱ�Ϊ��һ��i�ױ����������� ��
��

 (4)
(4)
ʽ�У�rTEΪ��״��صķ���ϵ���� ������knΪ��n��IJ���������
������kn��n��IJ��������� ������
������ ��
�� �ֱ�Ϊ��n��Ĵŵ��ʼ��絼�ʣ�ͨ����Ϊ��صĴŵ��ʵ������ɿռ�Ĵŵ��ʣ���
�ֱ�Ϊ��n��Ĵŵ��ʼ��絼�ʣ�ͨ����Ϊ��صĴŵ��ʵ������ɿռ�Ĵŵ��ʣ��� ����Ϊ������Ȧ�����Ƶ�ʣ�hnΪ��n��ĺ�ȣ������״���ģ����ײ㼴��N��
����Ϊ������Ȧ�����Ƶ�ʣ�hnΪ��n��ĺ�ȣ������״���ģ����ײ㼴��N�� ����N=1ʱ��Ϊ���ȴ��ģ�ͣ���ʱ
����N=1ʱ��Ϊ���ȴ��ģ�ͣ���ʱ ��
��
��֪���� ʱ�����ܵ��շ���Ȧ��ˮƽ����xr(��Ϊ�շ����)�Լ��շ���Ȧ�ĸ߶Ⱥ�(��2h)��Ӱ�졣������9�ֵ���Ȧ�ܹ��µĶ��γ�ʵ�����鲿�ֱ�����Ӧһ�γ��ı�ֵ������Եõ���Ӧ��Ȧ�ܹ���ͬ�����(In-phase)����������(Quadrature)�İ����֮һ(10-6)[6]��
ʱ�����ܵ��շ���Ȧ��ˮƽ����xr(��Ϊ�շ����)�Լ��շ���Ȧ�ĸ߶Ⱥ�(��2h)��Ӱ�졣������9�ֵ���Ȧ�ܹ��µĶ��γ�ʵ�����鲿�ֱ�����Ӧһ�γ��ı�ֵ������Եõ���Ӧ��Ȧ�ܹ���ͬ�����(In-phase)����������(Quadrature)�İ����֮һ(10-6)[6]��
2 ��̬��ת������������̬У��
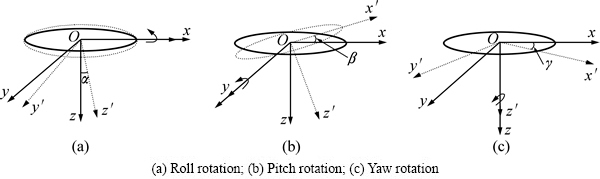
Ϊ������������̬����ת�仯���������Ե��յ����ĵ���Ϊ����ԭ�㽨����˫����ϵ����ͼ3��ʾ��һ��Ϊ����ƽ�з���ʱ�Ĺ�������ϵ(x, y, z)������x��Ϊˮƽ������з���ƽ�У�y��Ϊˮƽ������з���ֱ����z������з���ֱ���Ҵ�ֱ���¡�һ��Ϊ������̬�����仯��ĵ�������ϵ(x��, y��, z��)��������ƽֱ����ʱ����������ϵ���������ϵ�غϡ���֪���տ��ܻᷢ��������������ƫ��3����̬��ת�����ֱ����ƫ�������ĺ��߽����µ�����x������ת����������ת��������е��ٶȷ����仯�����ջ������βҡ����y������ת����������ת�����ɻ�������ת����ղ����з紵��ʱ�����ջ���z����ת����ƫ����ת��
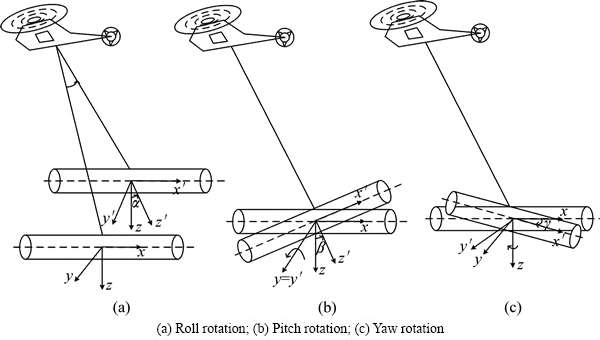
ͼ3 ������̬��ת�仯ʾ��ͼ
Fig. 3 Schematic diagram of bird attitude changes
ͼ4 ��Ȧ��̬��תʾ��ͼ
Fig. 4 Sketch of coil attitude changes
��֪�ڷ���̽��Ĺ����У����յķ����Ǧ��������Ǧ¾��ڡ�90��֮��仯��������㷭���Ǧ��������Ǧµ�����ֵ��Ϊ��ֵ��Ϊ�˱��ڷ��������������ù̶��ڵ������ĵ㴦�ļ���߶ȼƲ������ո߶ȵı仯�������ٿ��ǵ���ͨ����������ɻ��̶���ĸ����˶�[12]����ͼ3��֪����̽��ƽ̹�Ĵ��ʱ��ϵͳ�շ�����ܸ����ǵ�Ӱ�죬���߶ȱ仯���ܵ������Ǧ��������Ǧµ�Ӱ��[10, 12]����֪ϵͳδ������̬��תʱ���շ���Ϊ�ѣ����ڷ�����̬��ת��ϵͳ��ʵ���շ����Ϊ�ѡ䡣���յ�ʵ�ʷ��и߶�Ϊh�����ɼ���߶ȼƲ�õĸ߶�Ϊh�䣬�ɵ�ʽ(5)������������̬��תǰ��ϵͳ�շ�����˱仯��ϵͳʵ�ʸ߶�������߶Ȳ�ͬ��ʹ�����ֳ�����Ȧ�ܹ��µĶ��γ�����λ����
 (5)
(5)
�����շ���Ȧ�̶��ڵ���֮�У���˾����������ͬ����̬�仯���ڵ������շ���Ȧ���з���ʱ���ֱ�����Ȧ��̬δ������תʱ�Ĺ�������ϵ(x, y, z)��������̬��ת�����Ȧ����ϵ(x��, y��, z��)����ͼ4��ʾ����֪���ڽ���������ϵת��Ϊ��Ȧ����ϵ����ת����R������ת��������Ȧ��z�����ת������y�����ת�����Լ���x�����ת��������������˶��ã�������R-1=RT�����ڲ�״���ģ�ͣ���ˮƽ�����絼�ʵı仯��3�ֳ�����Ȧ�ܹ���ƫ����ת�Dz����У�����������ķ����У����ٿ���ƫ���Ǧõ�Ӱ�졣
 (6)
(6)
������HCP��Ȧ�ܹ�Ϊ������˵�������ڻ���HCP��Ȧ�ܹ�������ϵͳ����z��ķ���žأ��ڷ�����Ȧ������̬��ת���ɲ�״���ģ�͵ĸ��ֺ���������������ת��ķ���ž� ���ã��������״���ģ���µĶ��γ���
���ã��������״���ģ���µĶ��γ���
 (7)
(7)
���ڷ�����Ȧ�������Ȧ֮����ø������ӣ�������ͬ����̬�仯����˼�����ת�������Ȧ���յ��Ķ��γ� �����ɷ�����Ȧ��ת�������R-1��Hs���û�á���֪R-1=RT�������ɵã�
�����ɷ�����Ȧ��ת�������R-1��Hs���û�á���֪R-1=RT�������ɵã�
 (8)
(8)
��ΪHCP��Ȧ�ܹ�ֻ��z����Ľ��գ�ֻ�ܽ��� �������ɵã�
�������ɵã�
 (9)
(9)





 (10)
(10)
���ں���Ƶ�����ŷ������ķ��и߶�Զ�������շ��࣬�����ص�ż����ģ�ͣ���ʱ3�ֳ�����Ȧ�ܹ��¶��γ��ĸ��ֺ�������Ľ��ƹ�ϵ��ʽ�������ɵã�
 (11)
(11)
��ʽ(2)��(11)�еĹ�ϵ��ʽ����ʽ(10)���ɵã�

 (12)
(12)
ͬ�����ڷֱ���VCA��Ȧ�ܹ�(x�ᷢ�䣬x�����)��VCP��Ȧ�ܹ�(y�ᷢ�䣬y�����)������£��ɵ� ��
�� ������
������

 (13)
(13)

 (14)
(14)
ʽ�У� ��
�� ���ֱ�Ϊx��y��z����ķ���žأ�������ͬ�ķ���Ƶ��������
���ֱ�Ϊx��y��z����ķ���žأ�������ͬ�ķ���Ƶ�������� ��
��
 (15)
(15)
��ʽ(12)��(13)��(14)��ͣ��������Եõ���
 (16)
(16)
��֪��3�ֳ��õ���Ȧ�ܹ�����̬�����仯ʱ��������Ķ��γ�����������̬����Ϣ(��ʽ(5)��(12)��(13)��(14)��ʾ)�������Ҫ�������յ���̬����Ϣ�Լ�����ʽ(11)��ʵ�ֶ���̬������У��[14-15]�����մ��ݶ�������̬��ת���������ɰ�ʽ(16)�е�I��Ϊ���������̬��ת�����������ڲ���������̬�Ǧ����¾��أ�����̬�DZ仯����ķ��������У���˲�����Ҫ�Բ������ķ���������У�����뵥������HCP��Ȧ�ܹ��������ƣ�ͨ���Բ��������д����뷴�ݣ����Ի�ȡ��ص絼�ʵķֲ���Ϣ���ڲ���������ʱ��������Ҫ���3�ֳ�����Ȧ�ܹ�����ͬ��̬��ʱ�Ķ��γ������ϵͳ����������ᷢ�䡢������յ���Ȧ�ܹ�����Ϊ����ͬƵ�źŵ��Ӱ�죬����Ƶ�����ŷ������Ĺ���ԭ����3����Ȧ�ܹ�������3����ͬ��ʱ����(��ʱ��Ϊһ���������ڣ���0.1 s)��ʱ�����������ͬƵ��(���������ϳ�)�Ĵų��źţ���ʱ���Բ��һ�����������̬��ת�����������ڲ�������Ϊ�����Ҿ����ʵ�ַ�ʽ���ɼ����־��[30]��ר������Ҫָ�����ǣ���ϵͳ��̬�DZ仯�Ĺ����У�3����Ȧ�ܹ��¶��γ���������֮�������ͬ���շ��༰�߶ȡ�����ʵ�ʲ����Ĺ����У����������շ��༰�߶Ȼ��ܵ���̬�DZ仯��Ӱ�죬�Ӷ�����λ���������Ҫ�Բ�������λ��������У����
�������ص�ż����ģ�͵�����£���ʽ(12)��(13)��(16)�������Եõ����շ����Ǽ������ǵ�����ֵ����ͨ��ʽ(5)���ϵͳ��ʵ���շ����Լ����и߶�ֵ���Ӷ�����ʵ�ֲ�����λ������У����
 (17)
(17)
3 ģ�ͷ���
������ģ�ͷ��������Fugro���տ�̽��˾��RESOLVE���յ�ŷ�ϵͳΪ������֪RESOLVEϵͳ���շ���Ϊ7.9 m��������30 m�ĸ߶ȷ���[5]�����õķ���Ƶ��Ϊ10 kHz�����ȴ�صĵ絼��Ϊ50 ����m�����ڴ�ͳ��̬����У���㷨�Լ���������λ�����У���㷨���������ص�ż����ģ�͡����·������ȶ��ص�ż����ģ�ͽ�������֤����һ��������У����ϵͳ�շ����Լ��߶ȵı仯����IJ�����λ�������Բ�������̬У���㷨��У��Ч�����з�����
3.1 �ص�ż����ģ����֤
��ϵͳ���и߶�Զ�������շ���ʱ�������ص�ż����ģ�ͣ���ʱ���ֳ�����Ȧ�ܹ��¶��γ��벻����֮������Ľ��ƹ�ϵ��ʽ��������ʽ(11)��(16)�ij�����Ϊ��һ����֤�ص�ż����ģ�͵���ȷ�ԣ���������ͬ�շ��ࡢ�߶��Լ�����žص�����£��ֱ���ϵͳδ������̬��תʱ�� Hsx��Hsy��0.5Hsz�������� ��
�� �Լ�ϵͳ����������̬����תʱ��I0��δ������̬��תʱ��2Hsz��������
�Լ�ϵͳ����������̬����תʱ��I0��δ������̬��תʱ��2Hsz�������� ����ʽ(18)��ʾ��
����ʽ(18)��ʾ��

 (18)
(18)
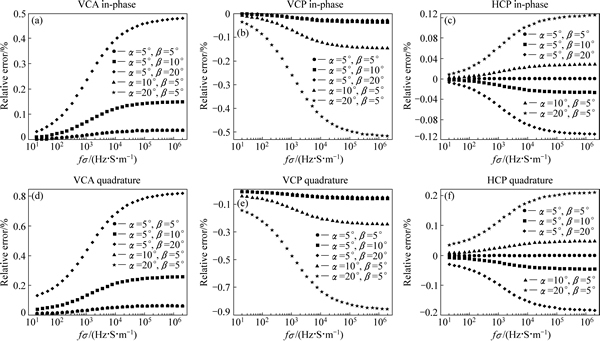
��Ҫָ�����ǣ������exx����eyy�ͦ�e0��ʵ�����鲿����ȡ��ͨ��ʽ(18)�з������ĸ��ʵ�����鲿�ֱ�����ֵ�õ������������ķ���������ֱ����շ�����1~10 m��仯���߶���20~60 m��仯�Լ�Ƶ�ʵ絼�ʳ˻���20 Hz��S/m~2 MHz��S/m��仯�Ԧ�exx����eyy�ͦ�e0��Ӱ�졣
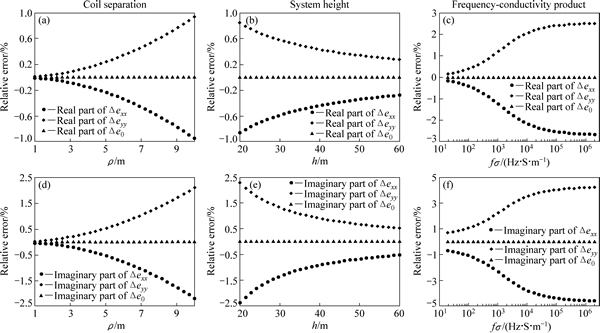
ͼ5 ��exx����eyy�ͦ�e0���շ��ࡢ�߶��Լ�Ƶ�ʵ絼�ʳ˻���Ӱ��
Fig. 5 Influences of coil separations, system heights and frequency-conductivity products on real parts (a)-(c) and imaginary parts (d)-(f) of ��exx, ��eyy and ��e0
��ͼ5��֪����eyy��ʵ�����鲿������ϵͳ�շ�����Ƶ�ʵ絼�ʳ˻���������������Ÿ߶ȵļ�С�������Դﵽ4.21%������exx��ʵ�����鲿���Ⱦ����릤eyy��ͬ�ı仯���ƣ��ҷ����෴�����Դﵽ-4.6%����5%�ľ���Ҫ���£�3����Ȧ�ܹ��¶��γ�����Ľ��ƹ�ϵ��ʽ��ʽ(11)��������e0��ʵ�����鲿��Ϊ�㣬˵���������ķ���������HCP��Ȧ�ܹ��µĶ��γ����Ҳ�������ϵͳ�շ��ࡢ�߶��Լ�Ƶ�ʵ絼�ʳ˻��ı仯���仯������������鲿����exx����eyy����e0��ʵ�����շ��ࡢ�߶��Լ�Ƶ�ʵ絼�ʵij˻���Ӱ���С���������ȡϵͳʵ�ʵ��շ����Լ��߶�ʱ������ʵ������Լ�I��ʵ������ʽ(17)����ʵ�ֶԲ�����λ������У����
3.2 λ����������У��
��ʽ(5)��֪������Ƶ�����ŷ������ڷ��еĹ��̵��У����ڵ��շ�����̬��ת��ϵͳ���շ�����ܵ������ǵ�Ӱ�����С�����ɼ���߶ȼƲ�õ�ϵͳ�߶�����ܵ������Ǽ������ǵ�Ӱ�������ʱ����������ϵͳ�շ���ı仯����ֱ�Ӳ��ò�õĸ߶���Ϣ�����ᵼ��ʵ��Ķ��γ�ֵ������ֵ����ƫ��Ӷ�����λ�����������ڷ������Լ�������Ӱ �죬ϵͳ���շ�������С��1 m�����߶����������10 m�����·ֱ����3�ֳ�����Ȧ�ܹ��¶��γ������������շ����Լ��߶ȵ�Ӱ�졣
���շ���Ϊ7.9 mʱ��õĶ��γ���Ϊ�ο����ɵ�3����Ȧ�ܹ��¶��γ�����������ͬ����������������������շ����µ��������ͼ6��ʾ����֪���շ���7.9 m��ͬ������������������������Ϊ�㡣3����Ȧ�ܹ��¶��γ���������ͬ�༰����������������������շ���ļ�С������������Ϊ���Ա仯�����������������ͬ��������շ���仯��Ӱ���С������VCA��Ȧ�ܹ������������շ����Ӱ����ֱ���Դﵽ0.42%��0.95%��HCP��Ȧ�ܹ������������������֮���ֱ���Դﵽ0.28%��0.63%����VCP��Ȧ�ܹ�����������С���ֱ���Դﵽ0.14%��0.31%��
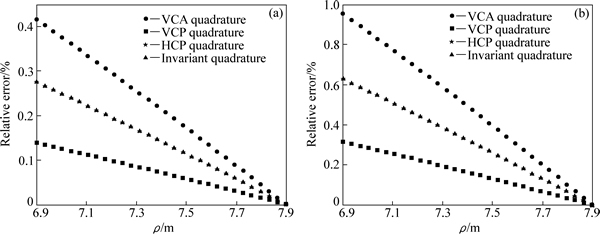
ͼ6 3�ֳ�����Ȧ�ܹ��¶��γ������������շ����Ӱ��
Fig. 6 Influences of coil separation on in-phase components (a) and quadrature components (b) of secondary fields of three common configurations and the invariant
ͼ7 3�ֳ�����Ȧ�ܹ��¶��γ����������ܸ߶ȵ�Ӱ��
Fig. 7 Influence of system height on in-phase components (a) and quadrature components (c) of secondary fields of three common configurations and invariant
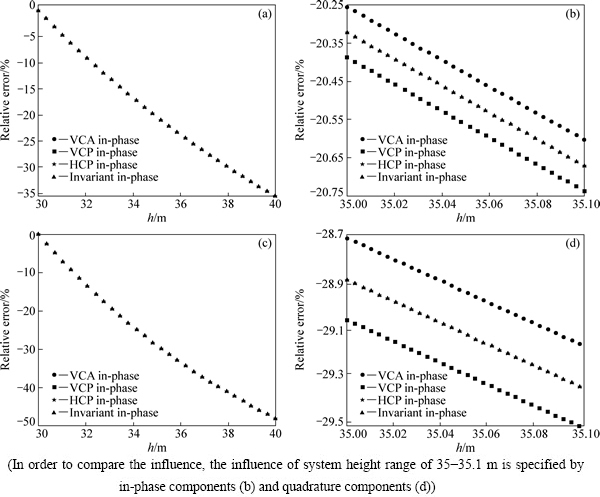
�Ե���ʵ�ʷ��и߶�Ϊ30 mʱ��õĶ��γ���Ϊ�ο����ɵ�3�ֳ�����Ȧ�ܹ��¶��γ�����������ͬ����������������������߶��µ��������ͼ7��ʾ����ͼ7��֪���߶�Ϊ30 m�����������Ϊ�㡣3�ֳ�����Ȧ�ܹ��¶��γ���������ͬ�༰��������������������Ÿ߶ȵ��������������֪������ı仯��Ϊ���Ա仯������VCA��Ȧ�ܹ��¶��γ����������ܸ߶ȵ�Ӱ����С���ֱ���Դﵽ-35.45%��-47.72%��HCP��Ȧ�ܹ��¶��γ������������������֮���ֱ���Դﵽ-35.54%��-47.94%����VCP��Ȧ�ܹ��¶��γ����������ܸ߶ȵ�Ӱ����ֱ���Դﵽ-35.64%��-48.16%��
�������ķ�����֪��3�ֳ�����Ȧ�ܹ��¶��γ��벻���������ܵ��շ��༰�߶ȱ仯��Ӱ�죬���շ��༰�߶ȱ仯��Сʱ���������Ա仯�����ܸ߶ȱ仯��Ӱ��ϴ������Ҫ��ϵͳ�շ��༰�߶ȱ仯�����λ��������У����
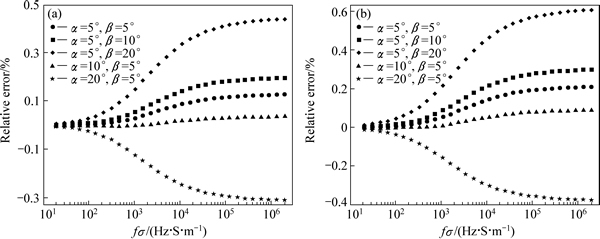
��ͼ8��֪������ʽ(17)����У�����շ��������������Ƶ�ʵ絼�ʳ˻�����������������������ȶ������Ŧ��Ǽ��½ǵ��������С�����Դﵽ1.26%�����ܦ½ǵ�Ӱ��ϴ߶ȵ�����������Ƶ�ʵ絼�ʳ˻�������������������ȶ��������Ŧ½ǵ���������������Դﵽ0.124%�������Ŧ��ǵ���������������Դﵽ-0.14%�����ܦ��ǵ�Ӱ���Դ��ڦ½ǡ�
3.3 �봫ͳ��̬У���㷨�ıȽ�
���ڴ�ͳ����̬У���㷨������̬�Dz���װ�ã��ܹ�ȷ�ز�����ϵͳ����̬����Ϣ���������Խ�ȷ��У��λ��������У���������ʱ�������ص�ż����ģ�ͣ�������3����Ȧ�ܹ��¶��γ���Ľ��ƹ�ϵ��ʽ��ʽ(11)�����ܵ�ϵͳ�շ��ࡢ�߶��Լ�Ƶ�ʵ絼�ʳ˻���Ӱ�������ʣ��������̬У��֮ǰ��3����Ȧ�ܹ��¶��γ�����̬�Ǵﵽ20��ʱ��ͬ�༰����������������ӽ���12%[14, 31]����ͼ9��֪������̬У��֮��VCA��Ȧ�ܹ�ͬ�������������������������Ƶ�ʵ絼�ʳ˻�����������������������ȶ����ֱ���Դﵽ0.48%��0.82%�����Ŧ½ǵ�����������һ������ܦ��ǵ�Ӱ�죻VCP��Ȧ�ܹ�������������Ƶ�ʵ絼�ʳ˻�����������������������ȶ����ֱ���Դﵽ-0.52%��-0.86%�����Ŧ��ǵ���������������һ������ܦ½ǵ�Ӱ�죻HCP��Ȧ�ܹ�������������Ƶ�ʵ絼�ʳ˻��Լ��½ǵ���������VCA��Ȧ�ܹ���������ֱ���Դﵽ-0.11%��-0.18%��������Ƶ�ʵ絼�ʳ˻��Լ����ǵ���������VCP��Ȧ�ܹ�������ֱ���Դﵽ0.124%��0.21%�����ܦ��ǵ�Ӱ���Դ��ڦ½ǡ���HCP��Ȧ�ܹ�������õ�У��Ч����
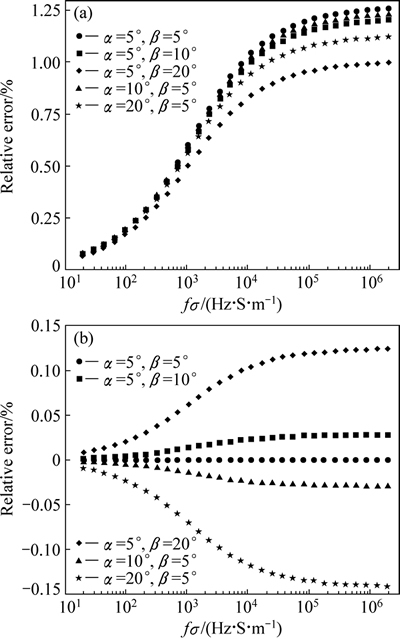
ͼ8 У������̬��ȡ��ͬ��ֵʱϵͳ�շ��༰�߶���Ƶ�ʵ絼�ʳ˻���Ӱ��
Fig. 8 Influence of frequency-conductivity products on coil separation (a) and system height (b) with specific attitude angles after correction
��֪�������Է��������У�����У��λ�����ʱ��ͬ�������ص�ż����ģ�ͣ�����3����Ȧ�ܹ��¶��γ���������֮������Ľ��ƹ�ϵ��ʽ��Ҳ���ܵ�ϵͳ�շ��ࡢ�߶��Լ�Ƶ�ʵ絼�ʳ˻���Ӱ�������ʣ������ͼ10��ʾ����̬���У��������ͬ���Լ���������������������Ƶ�ʵ絼�ʳ˻�������������������ȶ����ֱ���Դﵽ0.44%��0.61%�������Ŧ½ǵ�����������������Ŧ��ǵ�����������������ܦ½ǵ�Ӱ��ϴ�
������������֪������������̬У���㷨����ʵ�ִ�ͳ��̬У���㷨��3�ֳ�����Ȧ�ܹ��е�У��Ч����Ϊ��һ����֤���㷨�Ŀ����ԣ�ѡ���Ϊ������H�ͼ�K��������ģ�ͣ�����H��������ģ�͵ĵ����ʷֱ�Ϊ1000��10��100 ��m����Ӧ�ĸ߶ȷֱ�Ϊ50��20 m��K��������ģ�͵ĵ����ʷֱ�1000��10000��100 ��m����Ӧ�ĸ߶ȷֱ�Ϊ50��20 m������������ģ�ͷ���������о������ִ��ģ�ͣ��Ҧ�=0�������£�������ͬ���������������������ܦ½ǵ�Ӱ�죬��ͼ11��ʾ����֪�������ִ��ģ���²�����ͬ�༰�������������������Ŧ½ǵ�����������Ҿ�С��0.1%���Ӷ���֤�˲�������̬У���㷨�Ŀ����ԡ�
ͼ9 У������̬��ȡ��ֵͬʱ3�ֳ�����Ȧ�ܹ��¶��γ���Ƶ�ʵ絼�ʳ˻���Ӱ��
Fig. 9 Influences of frequency-conductivity products on in-phase components and quadrature components of secondary fields of VCA configuration, VCP configuration and HCP configuration with specific attitude angles after correction
ͼ10 У������̬��ȡ��ֵͬʱ��������Ƶ�ʵ絼�ʳ˻���Ӱ��
Fig. 10 Influence of frequency-conductivity products on in-phase components (a) and quadrature components (b) of invariant with specific attitude angles after correction
4 ����
1) �������ص�ż����ģ�͵�����£�3����Ȧ�ܹ��¶��γ���������֮��������ƵĹ�ϵ��ʽ���������������������ϵͳ�շ�������߶ȵĽ����Լ�Ƶ�ʵ絼�ʳ˻��������������������鲿��ʵ�����������С��
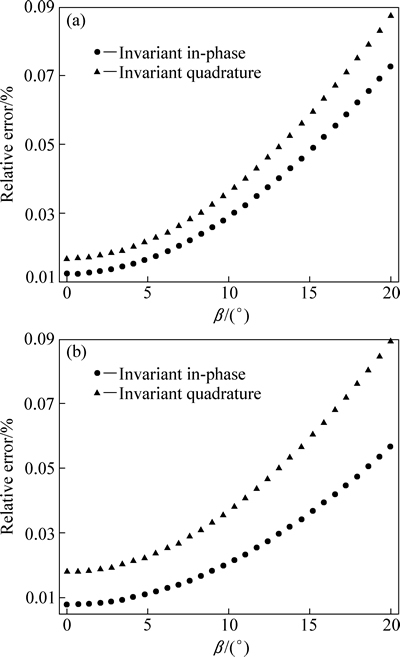
ͼ11 У����H�ͼ�K��������ģ���²������ܸ����ǵ�Ӱ��
Fig. 11 Influence of pitch angles on in-phase and quadrature components of invariant in H-type three-layer earth model (a) and K-type three-layer earth model (b) after correction
2) ���������̬��ת�����������Է��������У�ȴ�ܵ�ϵͳ�շ����Լ��߶ȱ仯��Ӱ�죬���и߶ȱ仯��������ϴ����ص�ż����ģ�ͣ�����ʵ�ֶ��շ����Լ��߶ȵĸ߾���У����У�������������ȷֱ�С��1.26%��0.14%��������У������շ����Լ��߶�ֵ����ʵ�ֲ�����λ������У����
3) ��ͳ����̬У���㷨�����ò�õĵ�����̬����Ϣ�����Խϴ������3�ֳ�����Ȧ�ܹ��е���̬������HCP��Ȧ�ܹ����Դﵽ��õ���̬У��Ч���������������������̬����Ϣ������£����������̬��ת����������̬У���㷨����ʵ����ӽ���У��Ч����
REFERENCES
[1] SIEMON B. Electromagnetic methods�Cfrequency domain[M]. Berlin: Springer Berlin Heidelberg, 2009: 155-178.
[2] WON I J. Small frequency-domain electromagnetic induction sensors: how in the world does a small broadband EMI sensor with little or no source-receiver separation work?[J]. The Leading Edge, 2003, 22(4): 320-322.
[3] FRASER D C. The multicoil II airborne electromagnetic system[J]. Geophysics, 1979, 44(8): 1367-1394.
[4] FRASER D C. Dighem resistivity techniques in airborne electromagnetic mapping[J]. Airborne resistivity mapping: Geological Survey of Canada, 1986: 86-22.
[5] CAIN M J. Resolve survey for US geological survey[R]. Montana: East Poplar Oil Fields, 2004.
[6] WON I J, OREN A, FUNAK F. GEM-2A: A programmable broadband helicopter-towed electromagnetic sensor[J]. Geophysics, 2003, 68(6): 1888-1895.
[7] SON K H. Interpretation of electromagnetic dipole-dipole frequency sounding data over a vertically stratified earth[D]. North Carolina: North Carolina State University, 1985: 53-88.
[8] WON I J, SMITS K. Airborne electromagnetic bathymetry[J]. Geoexploration, 1991, 27(3): 297-319.
[9] DESZCZ-PAN M, FITTERMAN D V, LABSON V F. Reduction of inversion errors in helicopter EM data using auxiliary information[J]. Exploration Geophysics, 1998, 29(1/2): 142-146.
[10] FRASER D C. Resistivity mapping with an airborne multicoil electromagnetic system[J]. Geophysics, 1978, 43(1): 144-172.
[11] HOLLADAY J S, LO B, PRINSENBERG S K. Bird orientation effects in quantitative airborne electromagnetic interpretation of pack ice thickness sounding[C]//MTS/IEEE Conference Proceedings, Halifax: OCEANS'97, 1997(2): 1114-1119.
[12] DAVIS A C, MACNAE J, ROBB T. Pendulum motion in airborne HEM systems[J]. Exploration Geophysics, 2006, 37(4): 355-362.
[13] DAVIS A, MACNAE J, HODGES G. Predictions of bird swing from GPS coordinates[J]. Geophysics, 2009, 74(6): F119-F126.
[14] YIN C, FRASER D C. Attitude corrections of helicopter EM data using a superposed dipole model[J]. Geophysics, 2004, 69(2): 431-439.
[15] ���ܰ, ��ͩ��, �� ��. ֱ����������̬�仯�Ե�ų�������Ӱ����ɼ���У�������о�[J]. ��������ѧ��, 2014, 57(4): 1310-1321.
QU Xin-xin, LI Tong-lin, WANG Fei. A Study on the effect of bird��s attitude on helicopter EM data and the correction method[J]. Chinese J Geophys, 2014, 57(4): 1310-1321.
[16] ����, �� ��, ��ɺɺ, ��Դ��. ֱ�������� TEM ���Ļ�����Ȧ��̬У���������о�[J]. ��������ѧ��, 2010, 53(1): 171-176.
JI Yan-ju, LIN Jun, GUAN Shan-shan, YU Sheng-bao, GONG Yuan-feng. Theoretical study of concentric loop coils attitude correction in helicopter-borne TEM[J]. Chinese J Geophys, 2010, 53(1): 171-176.
[17] �� ��, �� ��, ������, ��������쿭��. �̶������յ��ϵͳ����Ȧ��̬�����հڶ�Ӱ���о���У��[J]. ��������ѧ��, 2013, 56(11): 3741-3750.
WANG Qi, LIN Jun, YU Sheng-bao, GONG Yuan-feng, LI Bing-bing, ZHU Kai-guang. Study on influence and correction of coil attitude and bird swing for the fixed-wing time-domain electromagnetic system[J]. Chinese J Geophys, 2013, 56(11): 3741-3750.
[18] ���в�, ������. �����ݶ�����������Ӧ��[J]. ���ʿƼ��鱨, 2008, 27(3): 107-110.
WU Zhao-cai, LIU Tian-you. Magnetic gradient tensor: its properties and uses in geophysics[J]. Geological Science and Technology Information, 2008, 27(3): 107-110.
[19] CLARK D A. New methods for interpretation of magnetic vector and gradient tensor data II: application to the Mount Leyshon anomaly, Queensland, Australia[J]. Exploration Geophysics, 2013, 44(2): 114-127.
[20] BEIKI M, CLARK D A, AUSTIN J R, FOSS C A. Estimating source location using normalized magnetic source strength calculated from magnetic gradient tensor data[J]. Geophysics, 2012, 77(6): J23-J37.
[21] CLARK D A. New methods for interpretation of magnetic gradient tensor data[J]. ASEG Extended Abstracts, 2012(1): 1-11.
[22] SUI Yang-yi, LI Guang, WANG Shi-long, LIN Jun. Asphericity errors correction of magnetic gradient tensor invariants method for magnetic dipole localization[J]. Magnetics, IEEE Transactions on, 2012, 48(12): 4701-4706.
[23] ����ΰ, �� ��, ������, �� ��, ������. ���ݶ���������������Բ������������о�[J]. ����ѧ��, 2015, 64(19): 190701-1-190701-8.
 Jun-wei, CHI Cheng, YU Zhen-tao, BI Bo, SONG Qing-shan. Research on the asphericity error elimination of the invariant of magnetic gradient tensor[J]. Acta Phys Sin, 2015, 64(19): 190701-1-190701-8.
Jun-wei, CHI Cheng, YU Zhen-tao, BI Bo, SONG Qing-shan. Research on the asphericity error elimination of the invariant of magnetic gradient tensor[J]. Acta Phys Sin, 2015, 64(19): 190701-1-190701-8.
[24] WEAVER J T, AGARWAL A K, LILLEY F E M. Characterization of the magnetotelluric tensor in terms of its invariants[J]. Geophysical Journal International, 2000, 141(2): 321-336.
[25] ������, �����ģ��� �࣬�Ǻ�. ��������Ӧ��������ת����������[J]. ��̽��̽���㼼��, 2000, 22(4): 306-311.
WANG Li-feng, JIN Guang-wen, SUN Jie, BAI Deng-hai. The characteristics of rotational invariants of the earth electromagnetic response function[J]. Computing Techniques for Geophysical and Geochemical Exploration, 2000, 22(4): 306-311.
[26] ���, ������, �� ��. ��ص�����ϴ�������Ч�ӵ����ʵ�����[J]. ��̽��̽���㼼��, 2011, 33(5): 496-500.
LI Ai-yong, LIU Jian-xin, YANG Sheng. Utilization of effective apparent resistivity in MT data processing and interpretation[J]. Computing Techniques for Geophysical and Geochemical Exploration, 2011, 33(5): 496-500.
[27] �� ˧, �� ��, ��Զ��, ������. ������ά���ݵ���Ƶ��ص���迹��λ������У������[J]. ��������ѧ��, 2015, 58(2): 685-696.
RUAN S, ZHANG J, SUN Y B, WANG Xu-ben. AMT impedance phase invariant correction based on 3D MT modeling technology[J]. Chinese J Geophys, 2015, 58(2): 685-696.
[28]  R J, CHRISTENSEN N B. Sensitivity functions of frequency-domain magnetic dipole-dipole systems[J]. Geophysics, 2007, 72(2): F45-F56.
R J, CHRISTENSEN N B. Sensitivity functions of frequency-domain magnetic dipole-dipole systems[J]. Geophysics, 2007, 72(2): F45-F56.
[29] NABIGHIAN M N. Electromagnetic methods in applied geophysics: Volume 1, Theory[M]. USA: Society of Exploration Geophysicists, 1988: 131-311.
[30] ���־, �� ��, ������, ������, �� ��. һ�ֻ�ȡ������ת��������Ƶ�����ŷ�ϵͳ: �й�, CN104597510A[P]. 2015-05-06.
LI De-zhi, LI Guang, QU Xiao-dong D, FANG Guang-you, HUANG Ling. A method of obtaining the rotation tensor invariants for frequency domain electromagnetic system: China, CN104597510A[P]. 2015-05-06.
[31] FITTERMAN D V, YIN C. Effect of bird maneuver on frequency-domain helicopter EM response[J]. Geophysics, 2004, 69(5): 1203-1215.
Attitude corrections of attitude rotational invariant in airborne frequency-domain electromagnetic method
LI Guang1, 2, QU Xiao-dong1, 2, HUANG Ling1, 3, FANG Guang-you1, 3
(1. Key Laboratory of Electromagnetic Radiation and Sensing Technology, Chinese Academy of Sciences, Beijing 100190, China;
2. University of Chinese Academy of Sciences, Beijing 100049, China;
3. Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)
Abstract: There exist attitude errors resulting from the change of coupling between the coils and the earth for attitude angle change in the course of flight measurement of airborne frequency domain electromagnetic instruments. According to differences of sources, the attitude errors can be divided into the direction errors and the position errors. In order to eliminate the effect of attitude errors, this study firstly derives the electromagnetic tensor attitude rotational invariant from the coil configuration of tri-axial transmitter and tri-axis receiver in layered earth model. Then the cosines of roll angle and pitch angle can be deduced on the basis of superposed dipole model, achieving the correction of position errors of invariant. Compared with the traditional attitude correction algorithm, the attitude correction algorithm of invariant does not need to measure any attitude information. From the simulation results, the attitude correction algorithm of invariant can achieve the similar effects of traditional attitude correction algorithm in three common coil configurations. In the common H-type and K-type three-layer earth model, the relative error of invariant after correction is less than 0.1%, which proves the feasibility of the attitude correction algorithm of invariant.
Key words: airborne frequency domain electromagnetic method; attitude error; electromagnetic tensor; attitude rotational invariant; superposed dipole model
Foundation item: Project (ZDYZ2012-1-03-05) supported by National Major Scientific Research Instruments and Equipments Development Project
Received date: 2015-12-19; Accepted date: 2016-04-30
Corresponding author: LI Guang; Tel: +86-18811782541; E-mail: liguang706@163.com
(�༭ ��ѧ��)
������Ŀ�������ش����װ��������Ŀ(ZDYZ2012-1-03-05)
�ո����ڣ�2016-12-19�������ڣ�2016-04-30
ͨ�����ߣ��� �⣬��ʿ�о������绰��18811782541��E-mail��liguang706@163.com
ժ Ҫ�����ڴ�ż���ӵĺ���Ƶ�����ŷ������ڷ���̽��Ĺ����У����ڵ�����̬�ǵı仯��ʹ���շ���Ȧ����֮�����Ϸ����仯���Ӷ�������̬�����������Դ�IJ�ͬ�����Խ���̬����Ϊ���������λ��������֡�Ϊ��������̬����Ӱ�죬���ڲ�״���ģ�ͣ������Ƶ��õ����ᷢ�䡢���������Ȧ�ܹ��µĵ��������̬��ת���������ٻ����ص�ż����ģ�ͣ��Ƶ��õ����շ����Ǽ������ǵ�����ֵ������ʵ�ֲ�����λ������У�����봫ͳ����̬У���㷨��ȣ�����������̬���У���㷨����������յ���̬����Ϣ���ɷ�������֪������������̬У���㷨����ʵ�ִ�ͳ��̬У���㷨��3�ֳ�����Ȧ�ܹ��е�У��Ч�����ڳ�����H����K��������ģ���£�У��������������С��0.1%���Ӷ���֤�˲�������̬У���㷨�Ŀ����ԡ�
[5] CAIN M J. Resolve survey for US geological survey[R]. Montana: East Poplar Oil Fields, 2004.
[8] WON I J, SMITS K. Airborne electromagnetic bathymetry[J]. Geoexploration, 1991, 27(3): 297-319.
[18] ���в�, ������. �����ݶ�����������Ӧ��[J]. ���ʿƼ��鱨, 2008, 27(3): 107-110.
[25] ������, �����ģ��� �࣬�Ǻ�. ��������Ӧ��������ת����������[J]. ��̽��̽���㼼��, 2000, 22(4): 306-311.
[26] ���, ������, �� ��. ��ص�����ϴ�������Ч�ӵ����ʵ�����[J]. ��̽��̽���㼼��, 2011, 33(5): 496-500.
