

DOI�� 10.11817/j.issn.1672-7207.2020.07.004
���û��������ӽ�Ծ�仯������������������
������,�ƹ��,������
������������ѧ ��Դ�������е����ѧԺ���ӱ� ������071003��
ժ Ҫ��
�������ӵ����źż�ⷽ�����ڻ���״̬�оݼ��㸴�ӡ�����״̬�ٽ�����Ծ�ȷȷ�������⣬���һ�ֻ��ڻ�����������״��Ծ�仯�����źż�ⷽ����ͨ���������͵Ļ���ϵͳ�Ķ���ѧ���ԣ��������ӳ��ֽ�Ծ�仯��Ϊ���ڴ���Ƶ���źŵ��ж����ݣ��������Ӧѡȡ��ֵ���Զ��жϻ��������ӱ仯�ķ������ڴ˻����ϣ���ƻ��ڻ�����������״��Ծ�仯�����źż��ϵͳ�����ս���ϵͳӦ���ڹ�����е���������������С��о�����������÷���Ϊ���ڻ������ӵ����źż���ṩ��һ�־����¶����ж���ķ����������ܹ�ʵ���Զ�������ź�Ƶ�ʣ�����ڻ������ӵ����źż�ⷽ���ļ�����ܣ������ڹ�����е��������źż��������ʵ�֣�����ʵ��Ӧ�ü�ֵ��
�ؼ���:���źż�⣻���������ӽ�Ծ�仯��������У��������
��ͼ�����:TH701;TN911.7 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��07-1781-11
Weak fault detection of rolling bearing based on step change of chaotic attractor
YAN��Xiaoli, TANG��Guiji, WANG��Xiaolong
(School of Energy, Power and Mechanical Engineering, North China Electric Power University,Baoding 071003, China)
Abstract: There are some problems in the existing chaotic state criterion, such as the calculation of qualitative chaotic state criterion is complicated, the critical point of quantitative chaotic state criterion is difficult to be determined, and the threshold value is not accurate enough. In order to solve these problems, a new method of weak signal detection based on chaotic attractor shape step change was proposed. Based on the analysis of the dynamic characteristics of several typical chaotic systems, the special properties of one attractor in the step change from one attractor to another attractor were taken as the basis of whether the frequency components to be measured were kept or not, and then the weak signal detection was realized. Finally, the proposed scheme was applied to the early weak fault diagnosis of rolling bearings. The results show that the method not only provides an effective quantitative judgment criterion, but also realizes the automatic selection of threshold and the automatic judgment of chaotic state. This new method has a better performance in weak signal detection, which can serve an effective method for weak fault signal detection of machinery.
Key words: weak signal detection; step change of chaotic attractor; rolling bearing; fault diagnosis
�ڻ�е�豸���Ϸ��������ڣ������ź������������Ϊ������ͳȥ�뷽���������ź�������ͬʱ���п��ܽ����������������ź�һͬ�˳����̶��ó�����ļ����ۣ���ˣ���ͳ���ϼ�ⷽ���Ա����źŵ������Ҫ��ϸߣ������������ϼ���Ӧ�����ܵ�������[1]����20����90���������BIRX��[2]�����������������źż�������ѧ����Ի��ڻ������ӵ����źż�����˴����Ĺ���[3-9]�������Ƿ���ȷ���Թ��ɵ���������Ե��˶���������Ա���Ϊ��ʼ�����Ͳ�����С�����п��ܵ��½����������ͬ��ͬʱ������ϵͳ�������н�ǿ��������[10]�����ڻ������ӵ����źż���������û���ϵͳ�IJ��������ԺͿ����ԣ�����û�ڱ��������ź��е����źŽ��м�⡣���������ͨ��������������������ȡ���źŵ��������������÷�����ϵͳ�������ԣ���ǿ���������¼�����źųɷ�[5]��Ŀǰ��Ӧ������������ϵĻ�������������Duffing����[6]��Lorenz����[7]�Լ�һЩ��ϻ�������[8]����Щ���ϵͳ��������ò����ı�ʹ����״̬�����仯��ԭ��������Ƶġ����ڻ������ӵ����źż�ⷽ���ؼ����ڻ���״̬�жϺ���ֵѡȡ[9-13]��Ŀǰ��������Ҫ�о�����״̬������״̬ת����жϷ���[14-17]�����ڻ���״̬֮�������״̬֮���ת����̵��о����٣��������л���״̬�о��Դ��ڶ��Ի����оݼ�����̸��ӣ�����ʱ�䳤�����������оݵĻ���״̬���ٽ������ȷ������ֵѡȡ������ȷ������[18-20]�������ڹ���ʵ����Ӧ�á���ˣ��о�����Ч�Ļ�������״̬�仯�оݺ���ֵѡȡ������������ڻ������ӵ��������źż�ⷽ�����ܾ�����Ҫ���塣�����������ȷ������͵Ļ���ϵͳ����������״�Ľ�Ծ�仯���ԣ�Ȼ������������״��Ծ�仯�Ļ����ϣ��������Ӧѡȡ��ֵ�������Զ��оݻ��������ӽ�Ծ�仯�ķ���������ƻ��ڻ���ϵͳ�����ӽ�Ծ�仯�����źż��ϵͳ�����ͨ���Է����źź�ʵ�������е��������źŵļ��ʵ�飬��֤�˷�������Ч�ԡ�
1 �������������ӽ�Ծ�仯����
����������ϵͳ�У�һЩ�ض�����Ϊ�ٽ�ֵʱ����������������������߽�ӽ��غϣ������ӵ���ͼ�ᷢ�����Ա仯��ת��Ϊ��һ���ȶ�������״̬����һ��ʽ�Ļ���[12]����ˣ�����ϵͳ��������״�ı仯���������ڻ���״̬������״̬��ת�������У�����ϵͳ������״̬����һ����״̬���һ�ֻ���״̬����һ�ֻ���״̬ת��ͬ����������ϵͳ��������״�仯�������ӵı仯����ϵͳ״̬�仯����ģ��ܹ���ӳ�����ı仯������ͨ���о�Duffing��Lorenz��2����͵Ļ������ӵ������ӽ�Ծ�仯������֤��һ���ۡ�
1.1��Duffing���ӵ������ӽ�Ծ�仯����
Duffing������ĿǰӦ����Ϊ�㷺�Ļ����������źż��ϵͳ���䶯��ѧ״̬����Ϊ

ʽ�У�











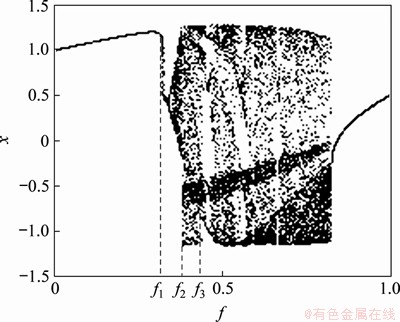
ͼ1��Duffing���ӷֲ�ͼ
Fig. 1��Bifurcation diagram of Duffing oscillator
��ͼ1��֪��Duffing�������ɱ����ڷֲ�ͨ�����ġ��ڲ���f�仯�Ĺ����У�Duffingϵͳ��0~f1֮��Ϊͬ�������f1~f2��Χ�ھ����˱����ڷֲ��ı仯�����ɵ�f2~f3��Χ�ڵĻ���״̬��������ڡ�����ȶ���״̬������֡��ڷֲ�ͼ�У����Թ۲쵽״̬����x��f2ǰ���������Խ�Ծ�Ա仯��
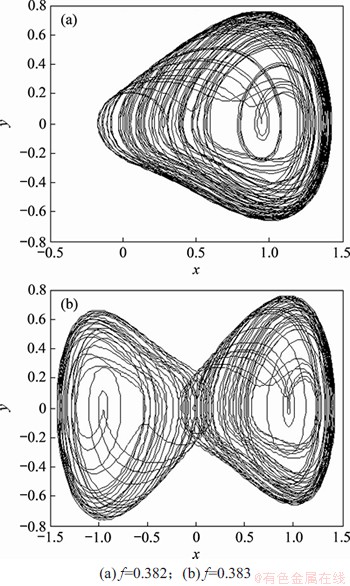
ͼ2��Duffing����x-y��ͼ
Fig. 2��x-y plane of Duffing oscillator
Duffing����x-y��ͼ��ͼ2��ʾ����ͼ2��֪������f����0��������0.382�Ĺ����У�״̬����x��ֵ��δ����ͻ�䣬x-y��ͼδ�������Ա仯����f��0.382���ӵ�0.383ʱ��x-y��ͼ��ʾ��Duffing���ӵ���������״���������Ա仯��״̬����x��ֵ������˽�Ծ�Ա仯����ˣ�����ͨ���۲�Duffing���������ӷ����˽�Ծ�仯���ó�����ϵͳ�IJ��������仯�Ľ��ۡ���Duffing���������ӵ���״�仯��Ϊ�����źŴ���ͬƵг���źŵ��ж����ݾ��п����ԡ�
1.2��Lorenz���ӵ������ӽ�Ծ�仯����
LorenzϵͳΪ�������λ���ϵͳ�����Ժ�ʱ���Ƶ�ʡ���������[13]����ķǹ�����������ź�ǿ��Lorenzϵͳ�����ƻ���״̬�仯˼�룬��ƻ���Lorenz���ӵ����źż��ģ�����£�

ʽ�У�




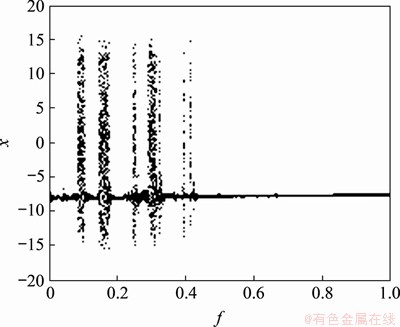
ͼ3��Lorenzϵͳ�ֲ��ֲ�ͼ
Fig. 3��Local bifurcation diagram of Lorenz system
Lorenz����x-z��ͼ��ͼ4��ʾ����ͼ4��֪������
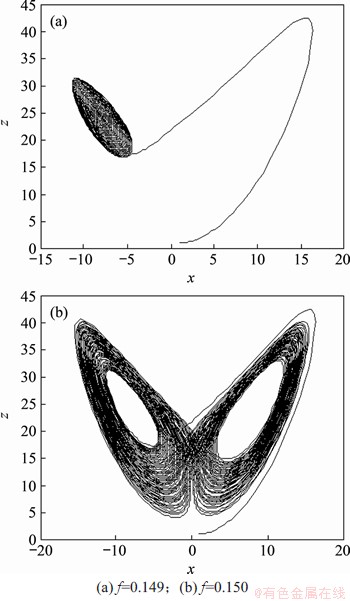
ͼ4��Lorenz����x-z��ͼ
Fig. 4��x-z plane of Lorenz oscillator
��2����͵Ļ���ϵͳ�Ķ���ѧ���Խ��з������֣������ض������ı仯������������ijһ�ٽ�ֵʱ��Duffing���Ӻ�Lorenz���Ӷ����������ӷ�����Ծ�仯��������ͨ���۲������ӷ�����Ծ�仯�ж�ϵͳ���������仯����һ����Ϊ���ڻ��������ӽ�Ծ�仯�����źż�ⷽ���Ŀ������ṩ������֧�֡�
2 ���źż�ⷽ��
���ڻ��������ӽ�Ծ�仯�����źż���Ϊ3���Σ���һ���ǻ���ϵͳѡȡ����ѡȡ���ʵĻ������ӣ������Ӧ�źż��ϵͳ���ڶ�����ϵͳ��������ȷ����ֵ��ϵͳ������ijһ�ٽ�״̬������������������źţ�ѡȡ���ʵ��ж����ݣ��жϴ����źųɷ��Ƿ���ڡ�������������ͼ5��ʾ��
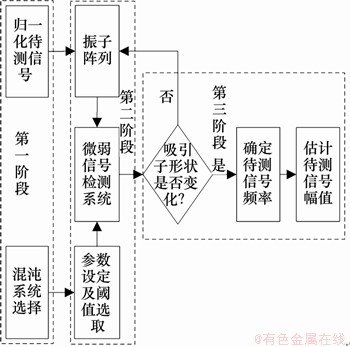
ͼ5���������ͼ
Fig. 5��Detection flow chart
�ڵ�һ�Σ�ѡȡ�������ӡ����ݻ������ӵĶ���ѧ���ԣ�ȷ���̶�������仯�����������Ӧ�����źż��ϵͳ��Ȼ��Դ����źŽ���Ԥ������Ϊ���⺬���źŶԼ��ϵͳ��Ӱ�죬���ô����źŵ����˲ʱ��ֵԤ�������ź�ǿ�ȣ����źŽ��й�һ�����������Ȩ���ӽ�ϣ�ʹ�ź�ǿ�Ƚ��͵�0.01 W���¡�
�ڵڶ��Σ�����ϵͳ������ǿ������Ƶ�ʱ仯��ϵͳ�Ķ���ѧ����Ӱ������ԣ���˲��ù̶�ǿ����Ƶ�ʣ����ñ�߶ȵ�˼��Դ����źŽ���ʱ��߶Ȼ�Ƶ�ʳ߶ȵ����ţ���߶����ڲ��ı��ź���ɢ��ֵ��ǰ���£���ʱ���Ƶ���������Ŵ����ź�[14]������Ƶ�ź�ת��Ϊ����Ƶ�ʵĵ�Ƶ�źš�Ȼ���ڵ�ǰ����������ȷ���ٽ�״̬����ֵ��������ϵͳ�����ٽ�״̬��
�ڵ����Σ���Ԥ������Ĵ����ź�������ϵͳ�У����������ӵı仯�����������ź��Ƿ��д���Ƶ�ʳɷ֡��������ӷ����仯����ȷ�������źŰ�����ǰƵ�ʵ�г���ɷ֡�
2.1����߶ȷ���
������źŵĽ�Ƶ��Ϊ



2.2����ֵ����Ӧѡȡ����
��ʵ������з�����ֵ��ѡȡ�Լ������Ӱ��Ҳ�Ƚ����ԣ����ȸߵ���ֵ�ܹ�����ϵͳ�ķֱ��������ǣ����������IJ�ȷ���ԣ���û�д���Ƶ�ʵ��ź�ʱ��ǿ����Ҳ�����յ����������ӷ����仯����ͬ��ǿ�ȵ���������Ӱ���£���ֵ�ľ��Ƚϸߣ��������Ժͱ����Զ����½������¼��������ȷ�ʽ��͡���ˣ���ֵѡȡ��Ҫ��������Ӧ�Ļ���ϵͳ�ٽ���ͻ���Ժ������ԣ��ٽ����ڽ�������뱣��һ���ĺ�ȣ�ͬʱ��ֵҲҪ��һ����������[15]��Ŀǰ�ֻ��ڻ������ӵ����źż�ⶼ���ڼ����ֵ����ȷ�������⡣�����Ի��������ӵĽ�Ծ�Ա仯��Ϊ�ж����ݣ����һ������Ӧѡȡ��ֵ�ķ�����
�Ի���Duffing���ӻ�����������״��Ծ�仯�ķ����������źż��Ϊ��������ѡȡ��1.1�ڵ���ͬ���۲�Duffing���ӵľֲ��ֲ�ͼ��ͼ6��ʾ����������״������Ծ�仯ǰ��ʱ����ͼ�����ֵ�f=0.382ʱ����������״û�з������Ա仯��ʱ����ͼ��״̬����xȫ������-0.2������f=0.383ʱ����������״�������Խ�Ծ�仯��״̬����x��һ����С��-0.2��x��ֵ�������Ա仯��
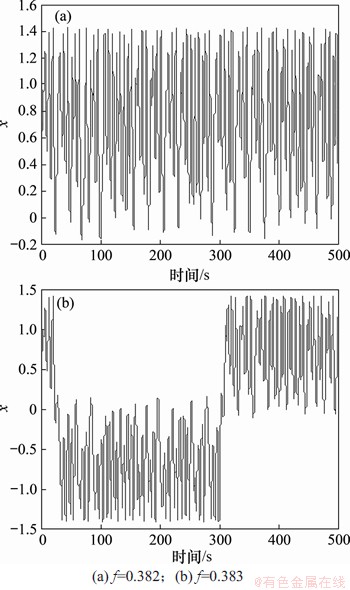
ͼ6��x��ʱ����ͼ
Fig. 6��Time domain waveform of x
�Դ�Ϊ���ݣ������ֵ�Զ�ѡȡ���������ϵͳ��ʼ����������1.1����ͬ����ֵΪfd�����ǿ����Ƶ�ʲ��ȵĴ����źŵ�Ƶ��ʱ��Ҫ�Դ����źŽ��г߶ȱ任�����任ϵ��

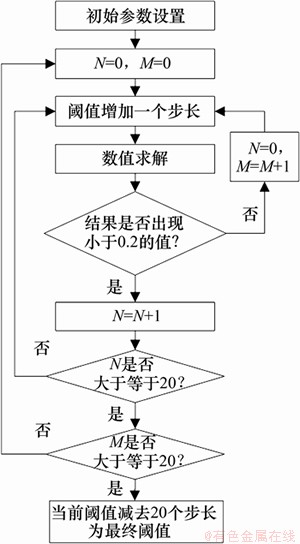
ͼ7���㷨����ͼ
Fig. 7��Detection flow chart
2.3�����������ӽ�Ծ�仯�Զ��жϷ���
��ֵȷ���������ź�����Duffing���źż��ϵͳ�У���������ǿ����Ƶ����ͬ�ɷ֣���ϵͳ����������״�����仯�����ϵͳ���ٽ�״̬ʱ����ͼ�У�״̬����x��ȡֵ������-0.2�������ٽ�״̬����һ����xС��-0.2���ɽ�-0.2��Ϊ�жϻ��������ӷ�����Ծ�仯����ֵxd���������ź��������źż��ϵͳ���ж�״̬�Ƿ���С��xd�ı���x���֣��þ������C������Ӧ����������������״�Ƿ����仯���������仯����

2.4������������
��f1Ϊ�����ź���ͬƵг���ɷ��źŷ�ֵ��



����

Duffingϵͳǿ������ο��ź���λ�ΧΪ


ϵͳ�����ٽ�״̬ʱ����fd����ʽ(4)��

ֻ�е�


3 �����źż��
���ݻ��ڻ���ϵͳ�����ӽ�Ծ�仯�ļ�ⷽ����ԭ�����������ź��к���ǿ����ͬƵ�ɷ֣��ܵ�ǿ�����ķ�ֵ������ֵ����ϵͳ��������״����ͻ�䡣Ϊ��֤�÷�������Ч�ԣ�������ʽ(6)��ʾģ��[17]ģ����������Ȧ���ڹ��ϣ���Ϊ�����ź�������ϵͳ��

ʽ�У�




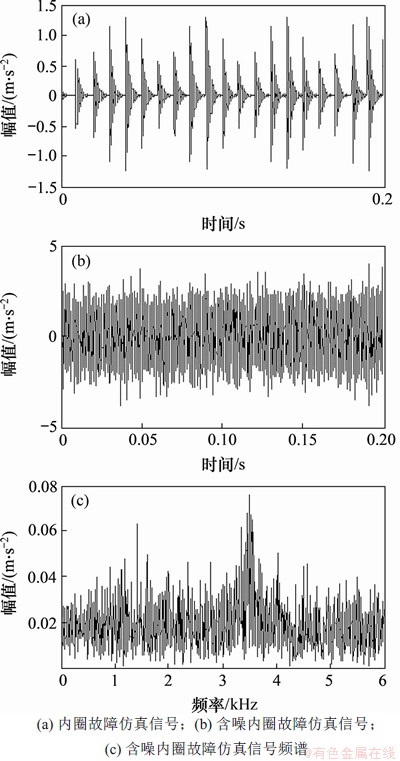
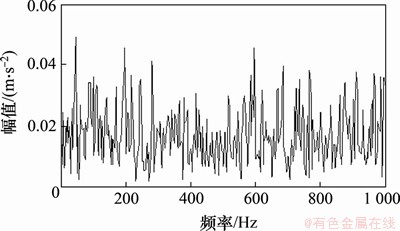
ͼ8�������źŵIJ��μ�Ƶ��
Fig. 8��Waveform and spectrum of simulated signal
ͼ9�������źŵİ�����
Fig. 9��Envelope spectrum of simulated signal
����Duffing��Lorenz���źż��ϵͳ�Է����źŽ��м�⣬���������źŵļ�Ȩ����W=0.005��2�����ϵͳ�IJ������1.1�ں�1.2���е�һ�¡����ڴ���ɷ���֪������������Ƶ����Ϊ�����źŵ�Ƶ�ʣ�����i=��1���ɸ��ݵ�2.1�ڵij߶ȱ任�����Դ����źŽ��б任������Duffingϵͳ�����Ȧ����������Ƶ�ʵ�1��Ƶ��2��Ƶʱ��
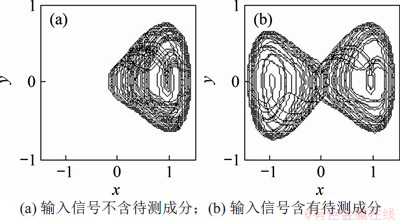
ͼ10��Duffing����x-y��ͼ(R=623.319)
Fig. 10��x-y plane of Duffing oscillator(R=623.319)
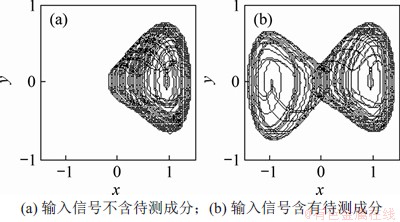
ͼ11��Duffing����x-y��ͼ(R=1 256.663)
Fig. 11��x-y plane of Duffing oscillator(R=1 256.663)
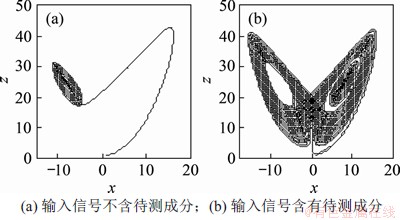
ͼ12��Lorenz����x-z��ͼ(R=10.472)
Fig. 12��x-z plane of Lorenz oscillator(R=10.472)
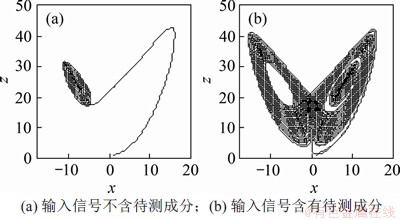
ͼ13��Lorenz����x-z��ͼ(R=20.944)
Fig. 13��x-z plane of Lorenz oscillator(R=20.944)
������-�������Ը�ϵͳ������ֵ��⣬�õ�״̬�����ļ��ϡ��ڶ�����Lorenzϵͳ���ź�����õ�����״̬����x�Ľ⼯��ȥ��ǰ�ڲ������ݣ��ж�ʣ�µĽ⼯���Ƿ��г�����ֵxd�Ľ���֣�Lorenzϵͳ��xd=0�����У����Զ��ж�����Ƶ���źŵĴ��ڡ�ͨ���ж���������״�Ƿ�����Ծ�仯���ж������ź��Ƿ����ض��ɷ֡���¼���������1��ʾΪDuffing��Lorenzϵͳ�IJ�����ֵ������������
��1��������ֵ����������
Table 1��Threshold and detection results for simulated signal

�ӱ�1���Կ��������û��ڻ��������ӵĽ�Ծ�仯�����������źż�⣬Duffingϵͳ��Lorenzϵͳ���ܼ������������Ȧ����������Ƶ�ʳɷ֡����������Duffingϵͳ��Lorenzϵͳ�ڶԲ�ͬƵ�ʵ��źŽ��м��ʱ�������Զ��Ƚ��ȶ��������ȷ����Խϸߣ�Lorenzϵͳ��������ʱ�䶼���Գ���Duffingϵͳ�������ʱ�϶̡�
4 ʵ���źż��
Ϊ��һ����֤���ķ�����Ч�Ժ�ʵ���ԣ����õ�ֱ���SKF6205�����Ȧ����Ȧ���˹�ֲ�����Ϊ1.5 mm������Ϊ0.2 mm���ҵ�С���ۣ���������а�װ��QPZZ-��ʵ��װ����ģ�����������������ϡ����õ������������ģ������д�������������״̬�µĻ�е��ת��������ת���ٶ�Ϊ1 470 r/min�����ü��ٶȴ������ɼ������źţ�����Ƶ��Ϊ12 kHz��
��2��ʾΪ������еĽṹ����������ɵ��ڵ�ǰ��в�����ת�������¹��������Ȧ���ϵ���Ƶ��Ϊ87.8 Hz�����������Ȧ��������Ƶ��Ϊ132.6 Hz��
��2��������нṹ����
Table 2��Structural parameters of fault rolling bearing

4.1����Ȧ���ϼ��
������һ�����������Ȧ�����źţ�ͼ14��ʾΪ�ź�ʱ����ͼ��Ƶ��ͼ��������й��������������Ƶ����û�з�������Ȧ��������Ƶ����صijɷ֡���Ȧ���ϰ�����ͼ15��ʾ���ɼ���δ����ͻ������Ȧ��������Ƶ�ʣ���˲���ͨ��Ƶ�����Ͱ��������ж�ʵ���źŵĹ������͡�

ͼ14����Ȧ����ʱ����ͼ��Ƶ��ͼ
Fig. 14��Time domain waveform and spectrum diagram of outer race fault
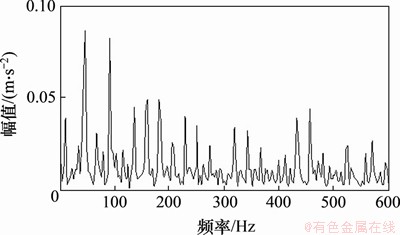
ͼ15����Ȧ�����źŰ�����
Fig. 15��Envelope spectrum of outer race fault signal
���ñ��ķ�����ʵ���źŽ��з�����������������Ȧ���ϵ�������Ƶ��ԼΪ551.8 rad/s��ʵ������з���Lorenz���������ڼ���Ƶ�źŷ�����ֳ����õ������ԣ���ˣ�ѡLorenz����ϵͳ��Ϊ�������ӣ�ϵͳ������1.1���е�һ�£���������Ӧ��ֵѡȡ����ȷ����ֵfd=0.149������һ������źŽ���R�߶ȱ任��R=��i/60��Ϊ��������Ƶ������в�������㾫�ȵ�ԭ����ɼ�������Ȧ������Ƶ��


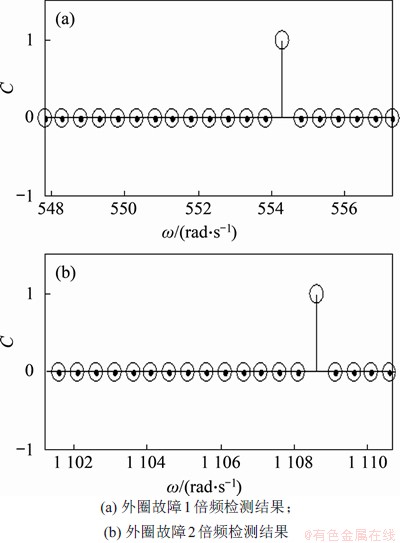
ͼ16����Ȧ���ϼ����
Fig. 16��Detection results of outer race fault
������Ȧ�����źŵ�������Ƶ��ʵ��ֵԼΪ554.2 rad/s��2��ƵԼΪ1 108.6 rad/s������Ƶ��ԼΪ88.2 Hz��176.4 Hz����ת���뻷��������Ӱ���£�����ֵ��ʵ��ֵ��һ��ƫ�������Ƶ�ʵļ���ֵ��ʵ��ֵ�dz��ӽ���˵�����ķ����ܹ������������Ȧ�����ϡ�
4.2����Ȧ���ϼ��
����Ȧ����ʵ���źŹ�һ������з�����ͼ17��ʾΪ�źŵ�ʱ����ͼ��Ƶ��ͼ���ɼ�Ƶ��ͼ����Ȧ��������Ƶ��ͬ�������ԡ�ͼ18��ʾΪ��Ȧ���ϰ����ס��ɼ���δ���ֺ���������Ƶ�ʳɷ֡���˲���ͨ��Ƶ�����Ͱ��������ж�ʵ���źŵĹ������͡�

ͼ17����Ȧ����ʱ����ͼ��Ƶ��ͼ
Fig. 17��Time domain waveform and spectrum diagram of inner race fault
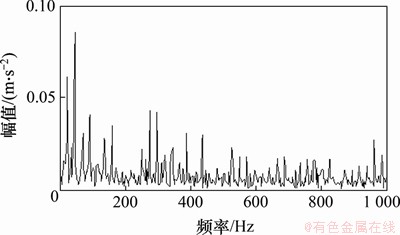
ͼ18����Ȧ�����źŰ�����
Fig. 18��Envelope spectrum of inner race fault signal
����4.1�ڵĻ������Ӷ�ʵ���źŽ��м�⡣�����㣬��Ȧ������Ƶ��ԼΪ833.2 rad/s������Ȧ������Ƶ��ȡֵΪ827.7~837.7 rad/s�����0.5 rad/s����20��ֵ������һ������źŽ���R�߶ȱ任��RΪ��i/�ء����������������״�����Ƶ�ʵı仯���߱�ʾ����ͼ19��ʾ��
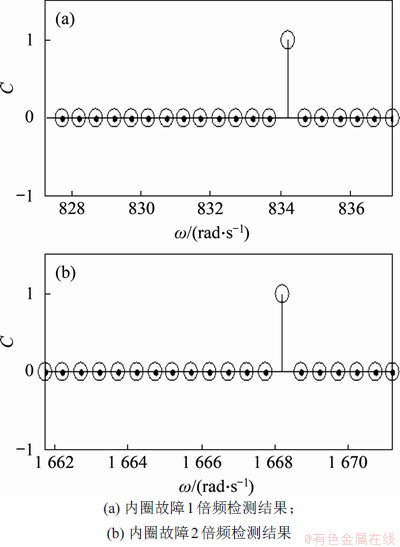
ͼ19����Ȧ���ϼ����
Fig. 19��Detection results of inner race fault
���������źŵĹ���Ƶ��ԼΪ834.2 rad/s��2��ƵԼΪ1 668.2 rad/s������Ƶ�ʵ�1��Ƶ��2��Ƶ�ֱ�ԼΪ132.8 Hz��265.5 Hz���ӽ�����ֵ������������������ܹ���ʵ���ź���ȷ�ؼ������������Ȧ���ϵ�����Ƶ�ʡ�
5 ����
1) ���Ų����ĸı䣬Duffing���Ӻ�Lorenz���Ӷ����������ӷ�����Ծ�仯���������һ�ֻ�����������״��Ծ�Ա仯�����źż�ⷽ����ͨ���������Ӧ��ѡȡ�����ֵ�������Զ������������״�仯�ķ���������۲���ͼ���Զ��ж��ź��д���ɷֵĴ��ڡ�
2) ���ķ����ܹ���Ч����������������źŵ�����Ƶ�ʳɷ֣����ڹ���ʵ�֡�Ϊ���ڻ���ϵͳ����г���źż��һ���ṩ����Ч�Ķ��������·��������������źŹ�������о���ʵ��Ӧ�ü�ֵ��
�ο����ף�
[1] ������, ��ά��. ���������ͻ������ӵ����źż��[J]. ��е�������Զ���, 2003, 32(3): 17-19, 23.
LI Zerong, WU Weigen. Faint signal detection based on noise and chaotic oscillators[J]. Machine Building & Automation, 2003, 32(3): 17-19, 23.
[2] BIRX D L, PIPENBERG S J. Chaotic oscillators and complex mapping feed forward networks (CMFFNs) for signal detection in noisy environments[C]// IJCNN International Joint Conference on Neural Networks. Baltimore, MD, USA: IEEE, 1992: 881-888.
[3] VAHEDI H, GHAREHPETIAN G B, KARRARI M. Application of duffing oscillators for passive islanding detection of inverter-based distributed generation units[J]. IEEE Transactions on Power Delivery, 2012, 27(4): 1973-1983.
[4] LIU H G, LIU X L, YANG J H, et al. Detecting the weak high-frequency character signal by vibrational resonance in the Duffing oscillator[J]. Nonlinear Dynamics, 2017, 89(4): 2621-2628.
[5] ������, ������, ��ʤ, ��. �����豸���ڹ������źŵķ����Լ�ⷽ��������Ӧ��[J]. ����ѧ��, 2011, 24(5): 529-538.
XU Yonggang, MA Hailong, FU Sheng, et al. Theory and applications of weak signal non-linear detection method for incipient fault diagnosis of mechanical equipment[J]. Journal of Vibration Engineering, 2011, 24(5): 529-538.
[6] ����, ���ƾ�, ����ͨ, ��. Duffing��������Ӧ�����Ƚ�ϵĽṹ���˼�ⷽ��[J]. ��.���������, 2014, 34(3): 473-478, 589-590.
LIU Liu, YAN Yunju, CHANG Xiaotong, et al. Damage detection method of multi-DOF structure based on duffing oscillator and response sensitivity[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(3): 473-478, 589-590.
[7] ��ʦ��, ����, ������, ��. Lorenz����ϵͳ���������źż�ⷽ���о�[J]. ����������, 2015, 35(1): 200-203.
XU Shikai, WANG Ji, LIU Shuyong, et al. Study on weak-fault signal-detection method based on Lorenz chaotic system[J]. Noise and Vibration Control, 2015, 35(1): 200-203
[8] ������, ��־��, ������. �������Duffing���ӵ��������źż��[J]. ����������, 2016, 36(3): 174-178, 209.
WANG Xiaodong, ZHAO Zhihong, YANG Shaopu. Weak fault signal detection based on coupled duffing oscillators[J]. Noise and Vibration Control, 2016, 36(3): 174-178, 209.
[9] ��ʿ��, ����Ⱥ, �����, ��. ����ͼ��ʶ�����۵Ļ��������б�[J]. �й��������ѧ��, 2003, 23(10): 47-50.
LI Shilin, YIN Chengqun, SHANG Qiufeng, et al. A method of identifying chaotic nature based on image recognition[J]. Proceedings of the CSEE, 2003, 23(10): 47-50.
[10] �����, �Ų�. ����Duffing���Ӽ��Ƶ��δ֪���źŵ��·���[J]. �����DZ�ѧ��, 2017, 38(1): 181-189.
LI Guozheng, ZHANG Bo. Novel method for detecting weak signal with unknown frequency based on duffing oscillator[J]. Chinese Journal of Scientific Instrument, 2017, 38(1): 181-189.
[11] ����, ����. һ�ֻ����������������ԵĻ����������[J]. ����ѧ��, 2016, 65(3): 56-71.
QIU Chenlin, CHENG Li. A chaotic analyzing method based on the dependence of neighbor sub-sequences in the data series[J]. Acta Physica Sinica, 2016, 65(3): 56-71.
[12] ASTAF��EV G B, KORONOVSKII A A, KHRAMOV A E. Behavior of dynamical systems in the regime of transient chaos[J]. Technical Physics Letters, 2003, 29(11): 923-926.
[13] CHOE C U, HOHNE K, BENNER H, et al. Chaos suppression in the parametrically driven Lorenz system[J]. Physical Review E, 2005, 72(3): 036206.
[14] ��־��, ������, �ィ��, ��. ����Duffing���ӵı�߶��������źż�ⷽ���о�[J]. ����ѧ��, 2012, 61(5): 60-68.
LAI Zhihui, LENG Yonggang, SUN Jianqiao, et al. Weak characteristic signal detection based on scale transformation of Duffing oscillator[J]. Acta Physica Sinica, 2012, 61(5): 60-68.
[15] ����, ������, ����ǿ. ����Duffing���ӵ��������źŻ����������о�[J]. ����ѧ��, 2013, 62(18): 54-59.
FAN Jian, ZHAO Wenli, WANG Wanqiang. Study on the weak sinusoidal signal detection property using Duffing chaos system[J]. Acta Physica Sinica, 2013, 62(18): 54-59.
[16] ������, ���ΰ, ��ΰ, ��. Duffing�������źż�ⷽ���о�[J]. ����ѧ��, 2013, 62(5): 42-47.
LIU Haibo, WU Dewei, JIN Wei, et al. Study on weak signal detection method with Duffing oscillators[J]. Acta Physica Sinica, 2013, 62(5): 42-47.
[17] �ƹ��, ������. IVMD�ں�����ֵ����Ĺ���������ڹ������[J]. ��.���������, 2016, 36(4): 700-707, 810.
TANG Guiji, WANG Xiaolong. An incipient fault diagnosis method for rolling bearing based on improved variational mode decomposition and singular value difference spectrum[J]. Journal of Vibration, Measurement & Diagnosis, 2016, 36(4): 700-707, 810.
[18] ���·�, ����ƽ, �����. ����λ��ֵ�б�Duffing���������·���[J]. �����DZ�ѧ��, 2010, 31(1): 161-165.
WU Yongfeng, ZHANG Shiping, SUN Jinwei. New method of phase transition identification of Duffing oscillator using phase difference[J]. Chinese Journal of Scientific Instrument, 2010, 31(1): 161-165.
[19] ����, ����ʯ. ����Lorenzϵͳ����г���źż��[J]. �����DZ�ѧ��, 2007, 28(11): 2034-2038.
CHEN Long, WANG Deshi. Detection of weak harmonic signals in strong noise based on Lorenz system[J]. Chinese Journal of Scientific Instrument, 2007, 28(11): 2034-2038.
[20] ������, ������. �����Զ���ѧ[M]. ����: �ߵȽ���������, 2004: 136-137.
LIU Bingzheng, PENG Jianhua. Nonlinear dynamics[M]. Beijing: Higher Education Press, 2004: 136-137.
���༭ �Կ���
�ո����ڣ� 2019 -11 -06; �����ڣ� 2019 -12 -27
������Ŀ(Foundation item)���ӱ�ʡ��Ȼ��ѧ����������Ŀ(E2019502047)�������У��������ҵ���ר���ʽ�������Ŀ(2019QN132��2018MS124) (Project(E2019502047) supported by the Natural Science Foundation of Hebei Province; Projects(2019QN132, 2018MS124) supported by Fundamental Research Funds for the Central Universities)
ͨ�����ߣ��ƹ������ʿ�����ڣ���ʿ����ʦ�����»�е�豸��������о���E-mail��tanggjlk@ncepu.edu.cn
ժҪ:������еĻ��ڻ������ӵ����źż�ⷽ�����ڻ���״̬�оݼ��㸴�ӡ�����״̬�ٽ�����Ծ�ȷȷ�������⣬���һ�ֻ��ڻ�����������״��Ծ�仯�����źż�ⷽ����ͨ���������͵Ļ���ϵͳ�Ķ���ѧ���ԣ��������ӳ��ֽ�Ծ�仯��Ϊ���ڴ���Ƶ���źŵ��ж����ݣ��������Ӧѡȡ��ֵ���Զ��жϻ��������ӱ仯�ķ������ڴ˻����ϣ���ƻ��ڻ�����������״��Ծ�仯�����źż��ϵͳ�����ս���ϵͳӦ���ڹ�����е���������������С��о�����������÷���Ϊ���ڻ������ӵ����źż���ṩ��һ�־����¶����ж���ķ����������ܹ�ʵ���Զ�������ź�Ƶ�ʣ�����ڻ������ӵ����źż�ⷽ���ļ�����ܣ������ڹ�����е��������źż��������ʵ�֣�����ʵ��Ӧ�ü�ֵ��
[1] ������, ��ά��. ���������ͻ������ӵ����źż��[J]. ��е�������Զ���, 2003, 32(3): 17-19, 23.
[7] ��ʦ��, ����, ������, ��. Lorenz����ϵͳ���������źż�ⷽ���о�[J]. ����������, 2015, 35(1): 200-203.
[9] ��ʿ��, ����Ⱥ, �����, ��. ����ͼ��ʶ�����۵Ļ��������б�[J]. �й��������ѧ��, 2003, 23(10): 47-50.
[10] �����, �Ų�. ����Duffing���Ӽ��Ƶ��δ֪���źŵ��·���[J]. �����DZ�ѧ��, 2017, 38(1): 181-189.
[11] ����, ����. һ�ֻ����������������ԵĻ����������[J]. ����ѧ��, 2016, 65(3): 56-71.
[14] ��־��, ������, �ィ��, ��. ����Duffing���ӵı�߶��������źż�ⷽ���о�[J]. ����ѧ��, 2012, 61(5): 60-68.
[15] ����, ������, ����ǿ. ����Duffing���ӵ��������źŻ����������о�[J]. ����ѧ��, 2013, 62(18): 54-59.
[16] ������, ���ΰ, ��ΰ, ��. Duffing�������źż�ⷽ���о�[J]. ����ѧ��, 2013, 62(5): 42-47.
[17] �ƹ��, ������. IVMD�ں�����ֵ����Ĺ���������ڹ������[J]. ��.���������, 2016, 36(4): 700-707, 810.
[18] ���·�, ����ƽ, �����. ����λ��ֵ�б�Duffing���������·���[J]. �����DZ�ѧ��, 2010, 31(1): 161-165.
[19] ����, ����ʯ. ����Lorenzϵͳ����г���źż��[J]. �����DZ�ѧ��, 2007, 28(11): 2034-2038.
[20] ������, ������. �����Զ���ѧ[M]. ����: �ߵȽ���������, 2004: 136-137.
