
һ�����辫���Ӳ��ʵʱ���ܵ��㶨λ����
���1�������2, 3������1
(1. ������ѧ ���ʹ�������ѧԺ������ ������710054��
2. ������Ϣ���̹����ص�ʵ���ң����� ������710054��
3. ���������������� ������710054)
ժ Ҫ��
���ο�վ�������ⲿ�Ӳ��Ʒ�ķDz�ʵʱ���ܵ��㶨λ(PPP)�������÷������ο�վ������վ�Ĺ��������Ӳ�����Ϊ�����������۲ⷽ�̣��ڹ�������վλ�ò�����ͬʱ�������Ӳ�һ�����ƣ��Ӷ�����ȴ��������˽�����Ӳ��Ʒ���ڿͻ��˾Ϳ��Ե������ʵʱPPP�Ľ��㡣�÷�����ֻ��4���ο�վ������������£���ʹʵʱPPP���ȴﵽ��������ͬ�������¹��������Ӳ��PPP����������徫�������28.8%����ֻ��2���ο�վ����������1���ο�վʱ��������Ȼά��������������ͬ�������IJο�վ�������ʱ������������ķ��������ٶ�Ҳ�ȹ��������Ӳ��PPP�����Ŀ졣
�ؼ��ʣ�
���ܵ��㶨λ��ʵʱ�������Ӳ�����������������ʱ����
��ͼ����ţ�P228.4 ���ױ�־�룺A ���±�ţ�1672-7207(2013)11-4520-07
A real-time precise point positioning method without precise clock bias
JIANG Nan1, XU Tianhe2, 3, XU Yan1
(1. College of Geology Engineering and Geomatics, Chang��an University, Xi��an 710054, China;
2. State Key Laboratory of Geo-Information Engineering, Xi��an 710054, China;
3. Xi��an Research Institute of Surveying and Mapping, Xi��an 710054, China)
Abstract: A zero-difference real-time precise point positioning (PPP) method based on a few reference stations was proposed. Clock bias of common satellites was used as common parameter for establishing observation equation, and both clock bias and position parameter were estimated, so PPP can be carried out alone on client-side, without waiting for clock product on server-side. Using this method real-time PPP precision can reach centimeter-level when there are only four reference stations, which increases 28.8% compared with the PPP method estimating satellite clock bias. The precision can also keep in centimeter-level when there are only two reference stations, even one reference station. Meanwhile, the convergence speed of the proposed method was little faster than that of PPP method estimating satellite clock bias at the same number reference station.
Key words: precise point positioning (PPP); real-time; precise clock bias; parameter estimation; convergence time
20����90�����Zumberge��[1]������ܵ��㶨λ(PPP)�������ü���������IGS�ṩ�ĸ߾��ȹ�����Ӳ��Ʒ���Լ��Dz��˫Ƶ�ز���λ�۲�ֵ�����þ��Զ�λģ�ͽ��н��㡣����PPP�������и�Ч�ʡ����������ص㣬���㷺Ӧ�õ����ǵ�����λ�������Ͷ��������Լ������ǵĶ��������[2-4]���߾���ʵʱ���ܵ��㶨λ����(Real-time PPP)��PPP������һ����Ҫ���죬������Ϊ�û��ṩʵʱ�ĵ����Ͷ�λ����Ŀǰ�ѳ�Ϊ��ز���ѧ����Ƚ����ŵ��о�֮һ���߾���ʵʱPPP��Ҫʵʱ�����ǹ�����Ӳ��ȻIGS�ṩ�ij����ٹ����Ʒ���������չ���൱[5]��������Ԥ���Ӳ��Ʒ�ľ���ֻ��5 ns��ԶԶ��������ʵʱ�߾���PPP��Ҫ��[6]��Ϊ�ˣ�������Ҳ��չ�˺ܶ��ȡ�߾���ʵʱ�Ӳ���о���Hauschild[7]ͨ��ȫ��NTRIP���������÷Dz�Ŀ������˲����������Ӳ��ʵʱ���ƣ�Edmundo��[8]Ҳͨ���������˲��㷨����ʵʱ�Ľ��ջ��Ӳ���ƣ�Laurichesse��[9]ͨ���̶��Dz������ģ�����㷨����ʵʱ������Ӳ�Ĺ��ƣ�Ge��[10]����˻����ز���ֺͷDz�α��ʵʱ���������ӵķ��������⣬Zhang��[11]��ʵʱ��̬PPP�в�����1 Hz�����ʵ������Ӳ���ƣ���ƾ���[12]�ھ���GNSS������������Ԫ���Ǽ��ֹ��ƾ����Ӳ��������ʵʱPPP���飻���غ���[6]���þֲ����������������Ӳ�Ĺ��ƣ�PANDA����Ҳʵ����ʵʱ�����Ӳ�Ĺ��ƹ���[13]�������о�������ʵʱ���Ƶõ��������Ӳ��Ʒ��ΪPPP����Ļ�����һ��ͨ��ѡ�����ȫ��۲�վ���߶������۲�վ������ʵʱ�Ӳ�Ĺ��ƣ��÷������Ϊ���������Ӳ��PPP���������������վ���������ýϽ��IJο�վһ�������Dz�Ĺ۲ⷽ�̣��������й������ǵ��Ӳ�����Ϊ�������λ�ò���������ģ���ȵ�һ�����ƣ���������������ṩ�Ӳ��Ʒ��
��Թ��������Ӳ��PPP������Ҫ���ô����ο�վ���ݹ��������Ӳ�ľ����ԣ��������������һ�ֻ��������ο�վ�������ⲿ�Ӳ��Ʒ�ķDz�ʵʱPPP����(��������ⲿ�Ӳ��PPP����)���ȴ���ѧģ���Ϸ�����2�ַ����������ԣ���ͨ��ʵ�����ݽ��IGS�����ij����ٹ����Ʒ��2�ַ������в��ԡ�
1 �����ⲿ�Ӳ��ʵʱPPP����
1.1 ����˼��
�����ⲿ�Ӳ��ʵʱPPP������Ҫѡ��һ��ο�վ���̶������꣬��������һ���ο�վ�Ľ��ջ��ӽ��й̶���Ϊ���ӣ�������������վ�����۲ⷽ��ʽʱ������վ�Ľ��ջ��Ӳ���Ա�ʾ������ӵ�����Ӳ�Ӷ���ֹ�����̳�������[14]��һ��ѡȡ�IJο�վ������վ����Ͻ�(������500 km)�����߾��л���һ�µĿ������ǣ����Կ���ͨ�����������Ӳ������Ŧ����ijһ��Ԫ���й۲ⷽ�̽������Ͻ��㣬�����������ⲿ�Ӳ��ʵʱPPP����ʵ�ֵĹؼ����ø÷�������ʵʱPPPʱ��ֻ������IGS������IGU��������Ϊʵ�ʹ�����������Ƚ���ʵʱ�Ӳ��Ʒ�Ĺ��ƣ��Ӷ������û�ʵʱ�Ե�����
1.2 ����ģ��
���ܵ��㶨λ(PPP)һ�������������Ϲ۲�ֵ���зDz���㣬��۲ⷽ����ѧģ�Ϳɱ�ʾΪ��
 (1)
(1)
 (2)
(2)
ʽ�У� ��
�� �ֱ�Ϊ��������α�����λ�۲�ֵ��
�ֱ�Ϊ��������α�����λ�۲�ֵ�� Ϊ���ǵ����ջ��ļ��ξ��룻cΪ���٣�
Ϊ���ǵ����ջ��ļ��ξ��룻cΪ���٣� ��
�� �ֱ�Ϊ���ջ��������Ӳ
�ֱ�Ϊ���ջ��������Ӳ Ϊ�������ӳ٣�
Ϊ�������ӳ٣� Ϊ������������ģ���Ȳ���(�ھ����ϵ�ֵ)��
Ϊ������������ģ���Ȳ���(�ھ����ϵ�ֵ)�� ��
�� �ֱ�Ϊα�����λ�Ĺ۲���������ʽ(1)��(2)���Ի������õ����̣�
�ֱ�Ϊα�����λ�Ĺ۲���������ʽ(1)��(2)���Ի������õ����̣�
 (3)
(3)

 (4)
(4)
ʽ�У� Ϊ��ģ�ͻ������������������峱��������������λ���ĵȸ�����XΪλ�ò�������(dx, dy, dz)��AΪλ�ò�������ϵ��(
Ϊ��ģ�ͻ������������������峱��������������λ���ĵȸ�����XΪλ�ò�������(dx, dy, dz)��AΪλ�ò�������ϵ��( ,
, ,
, )��
)�� ΪһЩ�ǿ�ģ�ͻ�����������������·��ЧӦ��������������ȣ�
ΪһЩ�ǿ�ģ�ͻ�����������������·��ЧӦ��������������ȣ� ��
�� Ϊ��Ϲ۲�ֵ�в
Ϊ��Ϲ۲�ֵ�в
�̶�����һ���ο�վ�Ľ��ջ�����Ϊ���ӣ������ο�վ������վ�Ľ����ӿɱ�ʾ�ɹ��ڻ��ӵ�����Ӳ�����вο�վ������Ҳ�ǹ̶��ģ������������Ϲ۲�ֵ�в�������ɶԲο�վ�����Ǽ�۲�����������п۳��������Ļ��Ӳο�վ(��ƻ�վ����ͬ)�������ϵ�α�����λ���̿ɱ�ʾΪ��
 (5)
(5)
 (6)
(6)
�����ο�վ����վһ��Ҳ�����Ƶ����̣���������һ�����ڻ��ӵĽ��ջ�����Ӳ���������������£�
 (7)
(7)

 (8)
(8)
ʽ�У� Ϊ�����ο�վ���ջ����ڻ��ӵ�����Ӳ
Ϊ�����ο�վ���ջ����ڻ��ӵ�����Ӳ
����վ���Ի����������ʽ(3)��(4)���ƣ�ֻ�ǽ�ʽ�еĽ��ջ��Ӳ��������վ���ջ����ڻ��ӵ�����Ӳ���Ի�����������£�
 (9)
(9)
 (10)
(10)
��ʽ(5)~(10)���Կ�������������ͨ�������Ӳ���ϵ��һ���������վ��վPPP���������������˴������õĹ۲ⷽ�̣������λ�ò�����ͬʱ�������Ӳ�һ�����㣬�����ṩ�ⲿ�Ӳ��Ʒ�����ڲο�վ������վ���뿿�ĽϽ���Ҳ����Ϊ�ǹ������һ�����й��ơ��÷�����Ȼ���õ��ǷDz�ļ��㷽ʽ��ȴ���Դﵽ��ֽ����Ч����
2 ʵʱ�����Ӳ��PPP����
Ŀǰ���õ�ʵʱ�Ӳ���Ƶķ����ǻ���ȫ��IGS�������������Ӳ���ƣ��˷�����Ҫ���ô����IJο�վ���ݽ��IGU�����������зDz���Ӳ���ƣ�ʵʱPPP���ȿɴ�����[6,15]����ʵʱ�Ӳ���Ƶ��������Ϲ۲�ֵ��������[15]��

 (11)
(11)

 (12)
(12)
ʽ�У� Ϊ��վ���ջ��Ӳ
Ϊ��վ���ջ��Ӳ Ϊ�����Ӳ
Ϊ�����Ӳ Ϊ���ջ������ǵļ��ξ��룻
Ϊ���ջ������ǵļ��ξ��룻 Ϊ�������ӳ٣�
Ϊ�������ӳ٣� Ϊ�������ϵ�ģ����(ʵ����)��
Ϊ�������ϵ�ģ����(ʵ����)�� ��
�� Ϊ��·��ЧӦ���۲������ȷǿ�ģ�ͻ���
Ϊ��·��ЧӦ���۲������ȷǿ�ģ�ͻ��� ��
�� Ϊ��Ϲ۲�ֵ��
Ϊ��Ϲ۲�ֵ��
�������ⲿ�Ӳ��ʵʱPPP�������ƣ��÷����ڹ����Ӳ�ʱҲ��̶�һ���ο�վ�Ľ��ջ��ӣ�����Ҳ�����вο�վ��������й̶�����ʱ��վ���̿ɱ�ʾ��ʽ(5)��(6)�������ο�վ�ɱ�ʾΪʽ(7)��(8)������վ�����������ͨ��PPP��������һ�¿��Ա�ʾ��ʽ(3)��(4)��
��Ȼ2�ַ�����һ��������֮��������ʵʱ�����Ӳ��PPP����(��Ʒ���2����ͬ)���ȹ��������Ӳ�������������û���õ�����վ�����ݣ��������ⲿ�Ӳ��ʵʱPPP����(��Ʒ���1����ͬ)�����вο�վ��������վ������һ�����������Ӳ�ģ��������Ӳ���ƻ��ڶ���۲����Ϸ���1���ţ�����һ���̶��ϻ�����Ӳ�Ĺ��ƾ��ȣ���˷���1��ʵʱPPP��λ����Ҫ�ȷ���2���š����ҷ���1�ڹ��ƶ�·��ЧӦ���������ȷ�ģ�ͻ������ʱ���۲ⷽ�̵�����Ҳ�ȷ���2�Ķࡣ���⣬����2��ʵʱ�Ӳ����һ�����ɷ������˽��н��㣬�ͻ�����Ҫ�ȴ��������˽�����ϣ��ѹ��ƽ��ͨ�����緢����������ܽ���ʵʱPPP�Ľ��㣬����һ���̶��ϻ������ʱ����Ȼ����1����ȴ��������˵��Ӳ���ƣ����������������������������Ŀͻ��˽��ջ�վԭʼ���ݣ�������ͬ�����㣬����ͨѶ��������Ҫ�ȷ���2�Ĵ������ʵʱ����2�ַ����������ӡ�
3 ��������
3.1 ��������
Ϊ�˽�һ���ȽϷ���ʵ��������2�ַ����ľ��ȣ�����ѡȡŷ�ο�������е�5��IGSվ�������飬���ݲ������30 s����վ�ľ���ֲ���ͼ1��ʾ������MADRվΪ����վ���������CANTվԼ340 km��������ԶACORվԼ474 km�����������Լ����29.4��km2��
3.2 ���ȱȽ�
����IGU�����ٹ������ʵʱPPP�Ľ��㣬IGU�����Ʒÿ��6 h����1�Σ�����ʱ�����3 h����ʱ��ÿ��IGU��Ʒ����48 h�����ݣ�ǰ24 h��ʵ�����ݣ���24 hΪ��������[16]��Ϊ�˷�ֹ��γ�ʼ������1 d��4��IGU�����Ʒ�ϲ���һ������������������ʱֻ���ʼ��1�Ρ�����1��ʵʱPPP���ڲ���Ҫ�ṩ�ⲿ�Ӳ����ֻ���ṩIGU�����Ʒ����4���ο�վ��1������վһ����㣻����2����Ҫ����4���ο�վ���ݹ��������ӲȻ����IGU�����Ʒ��������վ��ʵʱPPP��2�ַ����ο�վ�����궼�ǹ̶��ģ����ⶼѡȡͬһ����վ�Ľ��ջ�����Ϊ���ӣ�ÿ���ο�վ�ϵĶ������ӳ��Լ���·��ЧӦ���������ȷǿ�ģ�ͻ����Ҳһ�£����������Ӳ�Ĺ��ƾ��Ⱦͻ�ֱ�ӷ�ӳ��ʵʱPPP����õ���λ�þ����ϡ�
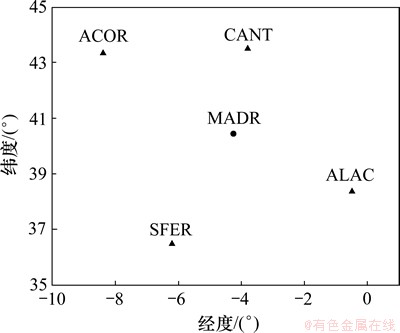
ͼ1 ��վ�ֲ�
Fig.1 Distribution of stations
����ѡȡ2010�������13 d��5��IGSվʵ������(����1)��2010�������153 dʵ������(����2)��2010�������298 dʵ������(����3)�ֱ��2�ַ�������ʵʱPPP��⣬����������ȽϾ��ȡ���2�ַ����õ���X��Y��Z 3����������꣬��ת������IGS������MADRվ����(��ֵ)Ϊԭ���NEU����ϵ�£���������ϵת���㷨�μ�����[17]�������õ��ľ���ÿ����Ԫ�������������ֵ��NEU�����ƫ�����ƫ����Ϊ�����������NEU 3���������ƽ���͵�����ƽ����3DRMS��Ϊ3D������3DRMS��Ϊ���Ⱥ���ָ�ꡣͼ2��ʾΪ����1~3��3D������1~3��3DRMS����1��
��ͼ2 ���Կ���������1������3D���Ҫ�ȷ���2��С�����ڱ�1��Ҳ���Եõ���֤������1�ڲ���ʱ��γ��ֽϴ�����Ҫ�������ڷ���1�вο�վ������վ��һ�����ģ��κ�һ���ο�վ�Ľϴ�������������վλ�ò������������֣�����������ij���ο�վ�Ķ������ӳ��ڴ�ʱ������ϴ�����ġ�������1�з���2����������㣬����ѯ��ʵʱ���Ƶ������Ӳ��Ʒ�ڴ�ʱ��������ֻ��1������ɶ�λ����ģ����������Ƿ���1���Ƿ���2����������������Ӱ�쵽��λ�ľ��ȡ�����1��1 d��3D����Ҫ�ȷ���2����Ҫ�Ƿ���2��ʵʱ�����Ӳ���ƻ���ģ���Ȳ��������ջ��Ӳ��Ѿ����ղ��ֵIJο�վ�������ӳ����ڷ���1�������˹��̣�������һ���ֲο�վ�������ӳ����ͻ�Ӱ�쵽λ�ò���������ȶ��ԡ�
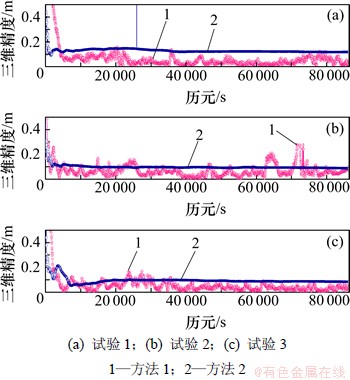
ͼ2 ����1~3��3D���ʱ������
Fig.2 Time series of 3D error of experiment 1-3
��1 ����1~3��3DRMS
Table 1 3DRMS of experiment 1-3 mm

�ӱ�1���Կ�����2�ַ�������ʹʵʱPPP���ȴﵽ����(����1�з���2��3DRMSδ�ﵽ��������Ҫ�����ڸ��칲�����Ǽ��ηֲ����ã�����ʵʱ���Ƶ������Ӳ�Ȳ�������)����4���ο�վ������£�����1��3D����ƽ���ȷ���2��Ҫ�߳�28.8%��
3.3 �ο�վ������ʵʱPPP��Ӱ��
Ϊ�˷����ο�վ������ʵʱPPP��Ӱ�죬��ACOR��ALACվȥ������������2���ο�վ(CANTվ��SFERվ)������վ(MADRվ)����CANTվ���ջ��ӹ̶�����2010�������13 d(����4)��2010�������153 d(����5)��2010�������298 d(����6)���ݷֱ���2��ʵʱPPP�������н��㡣����4~6��3D�����ͼ3��ʾ��
Ϊ�˽�һ�������ο�վ������ʵʱPPP��Ӱ�죬�����ֻ��1���ο�վ(CANTվ)�ļ��������ͬ����2010�������13 d(����7)��2010�������153 d(����8)��2010�������298 d(����9)���ݷֱ���2��ʵʱPPP�������н��㡣����7~9��3D�����ͼ4��ʾ������4~9��3DRMS����2��
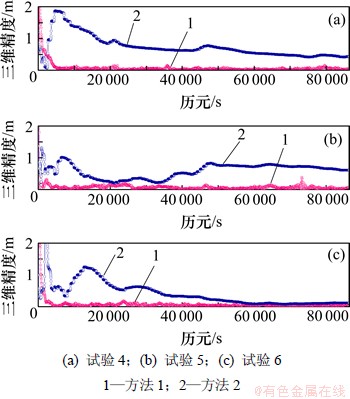
ͼ3 ����4~6��3D���ʱ������
Fig.3 Time series of 3D error of experiment 4-6
��Ȼ�ο�վ�������٣����ƹ��������Ӳ�Ĺ۲ⷽ��Ҳ����Ӧ���٣����Ƶ������Ӳ��Ҳ�ή�ͣ����Ǵ�ͼ3�ͱ�2(����4~6)���Ժ����Եؿ���������1�����λ��3D���û�б������Ҫ�����ڲο�վ�ļ��ٻ���û��Ӱ�칲�����ǵ�����(��ͼ5)�����Ӳ�ľ��ȣ���������������û��(��Щ��Ԫ��������)����ǰ����Ƶ��Ӳ���൱����˹��Ƶõ���λ�ò�������Ҳ�����½�(���ľ����������)��ͨ���Աȱ�2(����4~6)�ͱ�1(����1~3)���Եõ���֤����ͼ4�ͱ�2(����7~9)����������1���ڲο�վ����ֻ��1������������վһ�����۲ⷽ���������٣���ʱ���Ƶ������Ӳ���½�Ҫ��2���ο�վʱ�࣬��Ȼ�ο�վ�ļ��ٿ���ʹԭ��Ӱ������վλ�ò���������������٣������Ӱ��ԶԶС���Ӳ���½���λ�ò��������Ӱ�졣����2���ڲο�վ�����ļ��٣�λ�þ���Ѹ���½�(���1��������)��������Ϊ1~2���ο�վ�Ĺ۲����ݲ����Թ��Ƶõ��߾��ȵ������Ӳ��Ʒ��
�ӱ�2Ҳ���Կ���������1��ֻ��1~2���ο�վ�������3DRMS��Ȼά����������������߾���ʵʱPPP��Ҫ����ʵ��Ӧ���У����ܴ�������վ��Χֻ�������IJο�վ�����(����ֻ��1�����òο�վ)����ʱ����1��ʵʱPPP�����������ڷ���2��
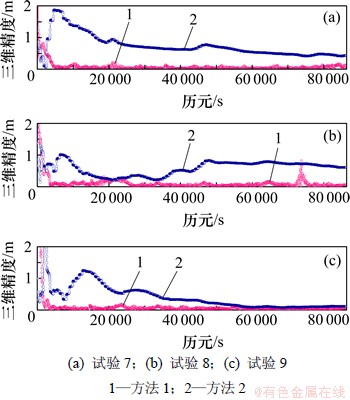
ͼ4 ����7~9��3D���ʱ������
Fig.4 Time series of 3D error of experiment 7-9
��2 ����4~9��3DRMS
Table 2 3DRMS of experiment 4-9 mm
3.4 ����ʱ��Ա�
��PPP��������3D���ﵽ�ȶ�״̬��Ϊ���������ݣ�����ʱ��һ��ȡ����ǰ�ڽ�����Ԫ�۲ⷽ�̵���������������ı�ֵ����ֵԽ������Խ�졣���������13 dʱ����2��������������㣬����ֻѡȡ�����153 d��298 dʱ4���ο�վ���������������ȡ2�ַ���ǰ440����Ԫ��������3D��ÿ��22����Ԫ����һ�Σ�ͼ6��ʾΪ��������ʱ�䡣
��ͼ6���Կ����������153 dʱ������1�ͷ���2��Լ�ֱ���Ҫ50 min��45 min�������ȶ�״̬�����⣬298 dʱ����1�ͷ���2��Լ�ֱ���Ҫ1 h��2 h�����������ȶ�״̬����ͼ5��ͼ6���Կ����������153 d�������ٶȽ�298 d�Ŀ졣����ͬ�����ο�վ����£�����1�������ٶȱȷ���2���Կ졣
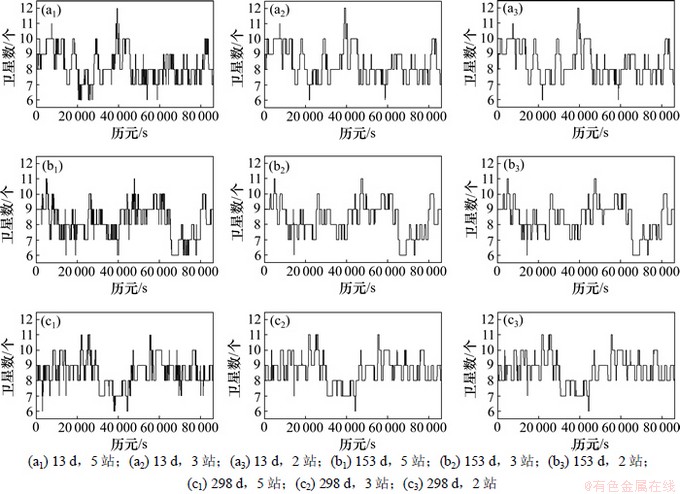
ͼ5 ������������ο�վ�����仯
Fig.5 Variation of common-view satellite number
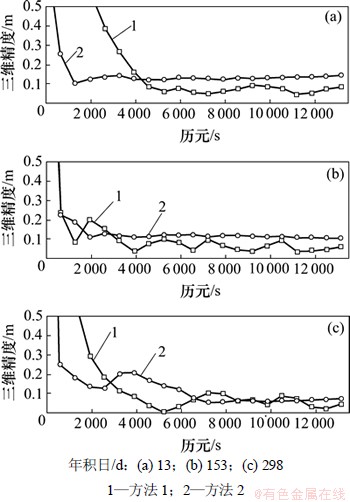
ͼ6 2�ַ���������ʱ��Ա�
Fig.6 Comparison of convergence time between two methods
4 ����
(1) ����1�ڹ��������Ӳ���ƵĹ۲ⷽ�������ϱȷ���2�Ķ࣬���Թ����Ӳ�ľ��Ƚϸߣ��Ӷ������λ�ò�������Ҳ�ϸߡ�
(2) ����1�Ӳ���λ�ò����ڿͻ���һ����ƣ�����ȴ�����˵��Ӳ����ݣ����ǿͻ��˱������������Ϸ������������ټ��Ͻϴ��������������ʵʱ�����뷽��2��ȸ������ӡ�
(3) ��4���ο�վ������£�����1��3D����ƽ���ȷ���2�ĸ߳�28.8%��
(4) ��ֻ��2���ο�վ������ֻ��1���ο�վ������£�����1��3DRMS��Ȼά����������3D�������Աȷ���2�ĸߣ���˵������1�����ڼ��ٲο�վ����������´ﵽ�뷽��2ͬ�ȵľ��ȣ����Է���1����Ӧ����ֻ���������òο�վ������
(5) ��ͬ�������ο�վ���������£�����1������ʱ��ȷ���2���Կ졣
�ο����ף�
[1] Zumberge J F, Heflin M B, Jefferson D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. J Geophys Res, 1997, 102(B3): 5005-5017.
[2] �ű���, ŷ����, ������, ��. ���þ��ܵ��㶨λ��������ӳ�[J]. ��������ѧ��, 2011, 54(4): 950-957.
ZHANG Baocheng, OU Jikun, LI Zishen, et al. Determination of ionospheric observables with precise point positioning[J]. Chinese J Geophys, 2011, 54(4): 950-957.
[3] ������, ��С��, ����. �̶��Dz�����ģ���ȵ�PPP���پ��ܶ�λ����[J]. ��������ѧ��, 2012, 55(3): 833-840.
LI Xingxing, ZHANG Xiaohong, LI Pan. PPP for rapid precise positioning and orbit determination with zero-difference integer ambiguity fixing[J]. Chinese J Geophys, 2012, 55(3): 833-840.
[4] ����, �����, �콨��, ��. ����ʵʱ���ܵ��㶨λ�����ı������Ԥ��[J]. ��������ѧ��, 2012, 55(4): 1129-1136.
LI Li, KUANG Cuilin, ZHU Jianjun, et al. Rainstorm nowcasting based on GPS real-time precise point positioning technology[J]. Chinese J Geophys, 2012, 55(4): 1129-1136.
[5] Hauschild A, Montenbruck O. Kalman-filter-based GPS clock estimation for near real-time positioning[J]. GPS Solut, 2009, 13(3): 173-182.
[6] ���غ�, ������, �콨��, ��. һ�ֻ���IGS����������������ʵʱ���ܵ��㶨λ����[J]. ���ѧ��, 2011, 40(2): 226-231.
YI Zhonghai, CHEN Yongqi, ZHU Jianjun, et al. An approach to regional real time precise point positioning based on IGS ultra-rapid orbit[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(2): 226-231.
[7] Hauschild A, Montenbruck O. Real-time clock estimation for precise orbit determination of LEO-satellites[C]// ION GNSS. Georgia, 2008: 581-589.
[8] Edmundo A, Filho M, Kuga H K, et al. Real time estimation of GPS receiver clock offset by the kalman filter[C]// 17th International Congress of Mechanical Engineering. Sao Paulo, 2003: 10-16.
[9] Laurichesse D, Mercier F, Berthias J P. Real time precise GPS constellation orbits and clocks estimation using zero-difference integer ambiguity fixing[C]// ION ITM 2009. California, 2009: 664-672.
[10] Ge M R, Chen J P,  J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime[J]. GPS Solut, 2012, 16(1): 9-17.
J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime[J]. GPS Solut, 2012, 16(1): 9-17.
[11] ZHANG Xiaohong, LI Xingxing, GUO Fei. Satellite clock estimation at 1 Hz for realtime kinematic PPP applications[J]. GPS Solut, 2011, 15(4): 315-324.
[12] ��ƾ�, ������, �¿�ƽ, ��. ����GNSS�����ʵʱ���ܵ��㶨λ�����ȷ���[J]. ��������ѧ��, 2010, 53(6): 1302-1307.
LI Haojun, WANG Jiexian, CHEN Junping, et al. The realization and analysis of GNSS network based real-time precise point positioning[J]. Chinese J Geophys, 2010, 53(6): 1302-1307.
[13] Shi C, Zhao Q L, Geng J H, et al. Recent development of PANDA software in GNSS data processing[C]// International Conference on Earth Observation Data Processing and Analysis (ICEODPA). Wuhan: SPIE. 2008: 1-9.
[14] ������, ����, ����. �Dz������ʵʱ/�º����Ӳ����[J]. �人��ѧѧ��: ��Ϣ��ѧ��, 2010, 35(6): 661-664.
LI Xingxing, XU Yun, WANG Lei. Undifferenced precise satellite clock error estimation and precision analysis[J]. Geomatics and Information Science of Wuhan University, 2010, 35(6): 661-664.
[15] ��С��, ������, ���, ��. ���ڷ���ϵͳ��ʵʱ���ܵ��㶨λ������Ӧ���о�[J]. ��������ѧ��, 2010, 53(6): 1308-1314.
ZHANG Xiaohong, LI Xingxing, GUO Fei, et al. Server-based real-time precise point positioning and its application[J]. Chinese J Geophys, 2010, 53(6): 1308-1314.
[16] ����, �����, �콨��, ��. ����IGUԤ�����ʵʱ���ƾ��������Ӳ�[J]. ��ز����������ѧ, 2011, 31(2): 111-116.
LI Li, KUANG Cuilin, ZHU Jianjun, et al. Real-time estimation of precise satellites clock bias based on IGU predicted orbit[J]. Journal of Geodesy and Geodynamics, 2011, 31(2): 111-116.
[17] ������, ������, ������. ����NEU(ENU)����ϵͳ[J]. ��ز����������ѧ, 2006, 26(1): 97-99.
HUANG Liren, GAO Yanlong, REN Lisheng. On NEU(ENU) coordinate system[J]. Journal of Geodesy and Geodynamics, 2006, 26(1): 97-99.
(�༭ �Կ�)
�ո����ڣ�2012-09-10�������ڣ�2012-12-24
������Ŀ��������Ȼ��ѧ����������Ŀ(41174008)��ȫ�����㲩ʿ����ר��(2007B51)
ͨ�����ߣ������(1975-)���У������Ƹ��ˣ����о�Ա�����������������ݴ��������ǵ��������뷽���о����绰��029-82339039��E-mail: xtianhe@263.net
ժҪ�����һ�ֻ��������ο�վ�������ⲿ�Ӳ��Ʒ�ķDz�ʵʱ���ܵ��㶨λ(PPP)�������÷������ο�վ������վ�Ĺ��������Ӳ�����Ϊ�����������۲ⷽ�̣��ڹ�������վλ�ò�����ͬʱ�������Ӳ�һ�����ƣ��Ӷ�����ȴ��������˽�����Ӳ��Ʒ���ڿͻ��˾Ϳ��Ե������ʵʱPPP�Ľ��㡣�÷�����ֻ��4���ο�վ������������£���ʹʵʱPPP���ȴﵽ��������ͬ�������¹��������Ӳ��PPP����������徫�������28.8%����ֻ��2���ο�վ����������1���ο�վʱ��������Ȼά��������������ͬ�������IJο�վ�������ʱ������������ķ��������ٶ�Ҳ�ȹ��������Ӳ��PPP�����Ŀ졣
[2] �ű���, ŷ����, ������, ��. ���þ��ܵ��㶨λ��������ӳ�[J]. ��������ѧ��, 2011, 54(4): 950-957.
[3] ������, ��С��, ����. �̶��Dz�����ģ���ȵ�PPP���پ��ܶ�λ����[J]. ��������ѧ��, 2012, 55(3): 833-840.
[4] ����, �����, �콨��, ��. ����ʵʱ���ܵ��㶨λ�����ı������Ԥ��[J]. ��������ѧ��, 2012, 55(4): 1129-1136.
[14] ������, ����, ����. �Dz������ʵʱ/�º����Ӳ����[J]. �人��ѧѧ��: ��Ϣ��ѧ��, 2010, 35(6): 661-664.
[16] ����, �����, �콨��, ��. ����IGUԤ�����ʵʱ���ƾ��������Ӳ�[J]. ��ز����������ѧ, 2011, 31(2): 111-116.
[17] ������, ������, ������. ����NEU(ENU)����ϵͳ[J]. ��ز����������ѧ, 2006, 26(1): 97-99.
