
Ԥ������еĽ�ģ��������
�º������Ź��ɣ�����
(���������̴�ѧ ˮ�����ܻ����˼��������Ƽ��ص�Ƽ�ʵ���ң������� ��������150001)
ժ Ҫ��
����Ϊһ����Ч�Ŀ��Ʒ�����Ӧ����������͵Ĺ�ҵ����������ν����ܹ����ӱƽ���ʵϵͳ��Ԥ��ģ�����ΪԤ�����Ӧ��Ч���Ĺؼ�����֮һ�����ĸ��ݹ�ҵ���̿���ϵͳ��չ���ص���о��ȵ㣬���ܽ�������ҵ����������Ԥ����ƵĽ�ģ���⣬����ϵͳ�����˽���ģ�͵ĸ������ԭ�������Ը��ַ��������������������Լ���ȱ������ܽ��������ͬʱ����δ��Ԥ������н�ģ������о�����ͷ�չǰ������Ԥ���չ����
�ؼ��ʣ�
Ԥ����ƽ�ģ�������罨ģ��ģ����ģ��֧����������ģ��
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0320-07
Overview of modeling algorithm in predictive control
CHEN Hong-li, ZHANG Guo-cheng, WAN Lei
(State Key Laboratory of Autonomous Underwater Vehicle, Harbin Engineering University, Harbin 150001, China)
Abstract: In recent years, predictive control has been applied in many large industrial control areas as an effective control method. However, the key problem is how to establish a predictive model approaching real system with high precision. According to the developmental character of the industrial control system, the modeling problems related to predictive control in industrial control areas for years were presented in this paper, including the methods and theories. Furthermore, the characters, applicable conditions and relative merits were summarized. It is also clarified that, in the future, the research orientation and the development of the modeling problem in predictive control are predicted and expected.
Key words: modeling algorithm; neural network; fuzzy modeling; support vector machine
�����ľ���������ۺ��ִ��������۵Ļ��㶼�DZ��ض���ȷ����ѧģ�ͣ�Ȼ����ʵ�ʵĹ�ҵ�������漰�Ķ�����Ƕ����롢����������ڴ��ͺ�ǿ�������Լ���ȷ���Եȸ�ά���ӵ�ϵͳ������ͨ������ķ��������侫ȷ����ѧģ�ͣ���Ҳ������ϵͳ��ȷ�Դ����˾����ս�������������Ԥ��ģ�;��ȵͣ��Ʊؽ�ֱ��Ӱ�쵽����ϵͳ�Ŀ��ƾ��ȣ��ɴ˿ɼ�����ģ��ΪԤ������еĹؼ�����֮һ����������Ԥ��ģ��Խ�ƽ���ʵϵͳ�Ķ�̬���ԣ�Խ���������ϵͳ�Ŀ��ƾ��ȡ����������������ܼ���������ͷ�չ�������ܼ�������Ԥ����ƵĽ�ģ���̣���������ģ�ͣ���Ϊ���ϵͳ���ƾ��ȵ���Ч;��֮һ��
1 Ԥ��ģ�ͳ��潨������
ģ�������ڱ�ʾϵͳ���ڲ������Լ����������ϵ��һ����������Ϊ���о�ϵͳ�������ġ�Ԥ����Ƶ�ģ�Ϳ��Է�Ϊ����ģ�ͺͷDz���ģ��(��ͼ1)������ģ�Ͱ�����ɢʱ��ģ�ͻ�����ʱ��ģ�͡��������ģ�ͻ�״̬�ռ�ģ�͡�ȷ����ģ�ͻ������ģ�͵�[1]���Dz���ģ�Ͱ���ϵͳ��ʶ�ȱ�ʶ��ģ�͡��������̵���ѧģ�������ֻ���������������������ϵͳ��ʶ����[2]������������ͨ������һЩ���ƵĶ��ɡ�������ԭ�������������ڲ��������Ĺ�ϵ���Ӷ��������̵���ѧģ�͡�ϵͳ��ʶ�Ƕ����й�ҵ���̽������飬�����������ݻ���̵������������ݹ�����ѧģ�͡�ϵͳ��ʶ���õ���ģ��ֻ�����ڹ��̵���������������ϵ��
��Ծ��Ӧģ�ͺ�������Ӧģ�;����ڷDz���ģ�ͣ�״̬�ռ�ģ�����ڲ���ģ�͡��ڹ�ҵ���ƵĹ����У����ض���ĸ���״̬�������ǿɲ�ģ���ˣ������ڹ�ҵ���̵�Ԥ�����ʵ���У�ͨ�����ò��Եķ����õ���������/����ķDz���ģ�ͣ���ֻ��ⶨ���ض���Ľ�Ծ��Ӧ����������Ӧ������Ϊϵͳ��Ԥ��ģ�ͣ�������ΪԤ����ƵĽ�ģ�����˼���ķ��㡣��ʵ���ϣ����ַ����õ���Ԥ��ģ���Ƿ���Сʵ�ֵģ������ڻ��ڴ�ģ�����о�ϵͳ���ȶ��Ժ�³��������ʽ�Ͻϸ��ӡ�
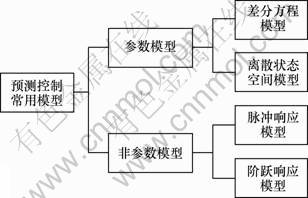
ͼ1 �����Ԥ��ģ��
Fig.1 Conventional prediction model
����ģ�͵�Ԥ����Ʒ����ڹ�ҵ���ܹ��õ��ɹ�Ӧ�ã��ںܴ�̶���������ͨ����ʶ��þ�����ȷ�ı��ض���ģ�͡�����Ԥ�����Խ��Խ�㷺��Ӧ���ڸ��ӵĹ�ҵ�����ڲⶨ���ض���Ľ�Ծ��Ӧ��������Ӧʱ�������ź��в��ɱ���ػ���������ʹ�ò�������������ģ��������绷�����ţ���ˣ����Ա��ض���Ľ�Ծ��Ӧ��������Ӧ���д�����ֱ�ӽ�����ΪԤ��ģ���Dz������ġ��ں����Ĺ�ҵ����ʵ���У����ǻ������Ի�ģ�������з�����Ԥ����ƣ��ѶԱ��ض�����ж�̬���Եõ��Ľ�Ծ��Ӧ����ͨ�����������ת���ɴ��ݺ����������ü����нϴ�����ȵ�α��������źŽ��в��Եõ��Ľ����������ط��������д�������ת����������Ӧ���ߣ���ת���ɴ��ݺ����ȣ�Ȼ��ͨ����������������õ���Ծ��Ӧ��������Ӧ����ģ����֤���Ӷ����յõ���Ծ�ȷ��Ԥ��ģ�͡����ֶ�Ԥ��ģ�͵Ĵ�����������Ч�ؼ��������������ŶԱ��ض����Ծ��Ӧ��������Ӧģ�͵�Ӱ�죬���ѹ㷺Ӧ�ù���ʵ���Լ���Ʒ���������С�
2 ���������������Ԥ��ģ��
�ִ���ҵ��Ѹ�ٷ�չ�Ӿ��˹�ҵ���̱������ڵĸ����ԣ����ڱ��ض���ĸ߽ס�������ģ�Ͷ���Ԥ��ʱ���ڻ��֡�����Ҫ�����ļ���ʱ�䣬���Ϊ������Ԥ�����Ӧ�õ���Ҫ�ϰ�֮һ�����⣬������ģ��ʧ���Լ����Žϴ�����⣬��ˣ�������������/���������ģ�������������ģ���ǽ����Щ�������Ч;��֮һ��
�й��˹�������(Artificial Neural Network, ��ANN)���о�ʼ��20����40�����1943�꣬McCulloch��Pitts�����˵�һ�����������ѧģ�ͣ���M-P��Ԫ[3]���˹��������Dz���������ʵ�ֵ�ϵͳ��ģ��������ϸ��������Ľṹ���ܵ�ϵͳ[4]�����˹��������е�һЩ�����ͷ������뵽Ԥ����ƽ�ģ�����У�ʹ��ģ�����ܻ��ķ���չ���ѳ�Ϊ��ǰ��ģ�����о����ȵ�֮һ�����ڷ�����ϵͳ������ģ��ת��Ϊ���ڲ����ռ������ģ���Ƿdz����ѵģ�����������Ԥ��������ϣ����ϵͳ���ض��������ģ�͡�ʹ�����������ϵͳ��ʶ����ҪԤ�Ƚ���ʵ��ϵͳ�ı�ʶ��ʽ����ʹ�÷�����ϵͳ�ı�ʶ��Ϊ���ܡ���������һ�����ܱƽ������ܹ�ѧϰ����Ӧ���ز�ȷ����ϵͳ�Ķ�̬���ԣ�����ϵͳ���б�ʶ��ͨ��ֱ��ѧϰϵͳ������/������ݣ�ѧϰ��Ŀ����ʹ����Ҫ��������ﵽ��С��ͨ��ѧϰ���������ܹ���ֱƽ����⸴�ӵķ���������/�����ϵ����ͳ�ı�ʶ����ͨ�������ű��ض���ģ�Ͳ���ά�����������úܸ��ӣ����������ϵͳ��ʶ�������ٶȲ������ڴ���ʶ����Ľ�������ֻ�������籾���Ľṹ���������õ�ѧϰ�㷨�йء�
����������������Ԥ��ģ�ͽ���Ԥ����ƣ���ʵ�ʾ���������Ϊ�����ʶģ�͵����������Ԥ���źţ�Ȼ�������Ż��㷨�������ʸ�����Ӷ�ʵ�ֶԸ߽ס�������ģ�͵�Ԥ����ơ������������Ԥ��ģ�ͽ�ģ�����߽��У����������Լ�����������ϵͳ�������������˹�������ģ���кܶ��֣�����Werbos���������(Error back propagation�����BP)ѧϰ�㷨��������Ӱ�����ʹ����������ѧϰ�㷨��1986�꣬Rumelhart��������зֲ����������·��ֲ��Ľ���BP�㷨[5]��
BPģ����һ������������ģ�ͣ����������������㾭����Ԫ�����д��ݺʹ��������������㡣����㴦�������У�ÿһ����Ԫ��״ֻ̬�Ƕ���һ����Ԫ��״̬����Ӱ�졣������㣬���������������������бȽϣ������߲��ȣ�����뷴�����̡�����ʱ��������źŰ�ԭ����ͨ·���أ�ͬʱ������������ĸ�����Ԫ��Ȩϵ����Ȼ��ת���������̡�ģʽ�������������淴�����С���������������������IJ��Ͻ��У����������ģʽ��Ӧ����ȷ��Ҳ������ߣ�ֱ�������ȫ�����С�ڸ�����ֵ��ѧϰ��ֹ��������ɵõ��������������Ӧ���ȶ�Ȩֵ��
�ٶ��ڵ�n�ε���������˵ĵ�j����Ԫ�����Ϊyj(n)����õ�Ԫ������ź�Ϊ��
![]() (1)
(1)
���У�dj(n)Ϊ�õ�Ԫ��������������嵥Ԫj��ƽ�����Ϊ![]() ����������ܵ�ƽ������˲ʱֵΪ
����������ܵ�ƽ������˲ʱֵΪ
![]() (2)
(2)
���У�c�������������Ԫ����ѵ��������������ΪN����ƽ�����ľ�ֵΪ
![]() (3)
(3)
���У�EAVΪѧϰĿ�꺯����ѧϰ��Ŀ����ʹ�����С��EAV����������Ȩֵ����ֵ�Լ������źŵĺ� ��[6]���������ѧϰ����ʵ�ʾ��ǽ������뵽�����һ��ӳ�䣬���õ�ϵͳ���ض������ѧģ�͡�ͼ2��ʾΪ����3���BP����ṹͼ��
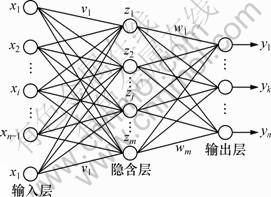
ͼ2 3��BP����ṹͼ
Fig.2 Three layers of BP network structure
��ͨ������£���BP�㷨�������ٶȽ�������ˣ�������һ����üӹ������BP�㷨���ѧϰ���ʵ�BP�㷨�ȸĽ���BP�㷨�������ѧϰ�ٶȵ�ͬʱ��ģ��Ԥ��ľ���Ҳ�ܸߡ�
3 ģ��Ԥ��ģ��
ģ��ģ����һ����ģ�������ģ������ֱ�ӹ�ϵ��ϵͳ��������������ģ����������һ�ַ�����ģ�ͣ����ڱ��︴��ϵͳ�Ķ�̬����������ģ�������бȽ���ȷ���������壬һ�γ�Ϊ��������ϵͳ��һ����Ҫ�ֶ�[7]��Zadeh��1965�������ģ����ϵͳ��ģ������/����ռ�֮��ķ�����ӳ���ϵ[8]��Ŀǰ���ڷ�����ϵͳ���ܽ�ģ�����У�ģ����ģ�ǽ�Ϊ����ķ����Խ�ģ������ģ��ϵͳ�������õıƽ����������������⾫�ȱƽ��н�ռ��ϵ��������������������Ѿ��õ�֤�������⣬ģ��ģ�ͻ����к�ǿ��³���ԺͿ������ԡ���ˣ���������������ϵͳģ����ģ�ܵ��㷺���ӣ������о�������ģ����ģ�ķ����ɹ�����˳��潨ģ�������������ĸ���ϵͳģ�͡���õ�ģ��ģ���У�Mamdaniģ�͡�ģ����ϵģ�ͺ�Takagi-Sugeno(T-S)ģ��[8]�����У�T-Sģ����Takagi ��Sugeno��1985�������һ�ֶ�̬��ģ��ģ�ͱ�ʶ ������
T-Sģ�͵�ǰ������ģ�����ϵ���ʽ���������ʾΪ���������������ϣ��൱���Ƚ������ռ�ģ���ػ���Ϊ�����ӿռ䣬Ȼ�������Ժ�����ϵ���ÿ���ӿռ��е�ϵͳ���ԡ�����T-Sģ�ͽ���ģ����ʶ�Ĺؼ�������Ч�ر�ʶ�����ϸ������������������ͨ�����ģ����ģ�����������ǹ����ȡ��ϸ�����ڴ˻����ϣ�ֻҪ����ģ����ģ���뷴ģ����ģ��Ϳ��Թ���ģ��ϵͳ�������й���ij�ȡ��ϸ����ģ����ģ�Ĺؼ�[9]��
ģ�������ɶ���ģ�������ɣ���ʽΪ��if��then����������ʽΪ��
Ri: If x1 is ![]() ��x2 is
��x2 is ![]() ������xk is
������xk is ![]()
Then ![]() (4)
(4)
���У�RiΪģ���еĵ�i������xiΪϵͳ�ĵ�i�����������![]() Ϊһ��ģ���Ӽ����������������Ӧ�������Ⱥ�������ǰ�����(ǰ������)��
Ϊһ��ģ���Ӽ����������������Ӧ�������Ⱥ�������ǰ�����(ǰ������)��![]() Ϊ���۲���(�������)�����ǣ�ϵͳ�ܵ����Ϊ��
Ϊ���۲���(�������)�����ǣ�ϵͳ�ܵ����Ϊ��
 (5)
(5)
![]() (6)
(6)
���У�n��ģ�������������wiΪ�����������ĵ�i������������ȣ�����![]() ΪȡС���㡣����i���������ʽ(5)������
ΪȡС���㡣����i���������ʽ(5)������
 (7)
(7)
����
 (8)
(8)
���ǣ�ϵͳ������Ա�ʾΪ
![]() (9)
(9)
����
![]() (10)
(10)
![]() (11)
(11)
����T-Sģ��ϵͳ�ı�ʶ������ȷ��ģ��������������ʽ��������״̬�ռ��������(�Ӽ�)��Ȼ����ݸ��������ݱ�ʶ�����������еIJ���ֵ������������Խ�࣬��������ԽС����ʶ����ϵͳģ��ģ�͵ľ���Ҳ��Խ�ߡ��÷�������Ҫ�����о���ϵͳ��������ϸ���˽⣬��ṹ�Ͳ����ij�ʼ��Ҫ������ף���������ģ��ģ�;��Ƚϸߡ�
4 ����֧����������Ԥ��ģ��
�����˹������缼���Ľ��������������������������Թ��̵�����ģ�ͳ�ΪԤ����ƽ�ģ����Ч�ֶ�֮һ�����ǣ����ֽ�ģ������Ȼ����һЩ���Խ�������⣬����������Ľṹ����ȷ��(�����������͡����������)��ѵ�������д��ھֲ���С�������Լ����ڹ�ѧϰ����ȡ�������Vapnik���ڽ��ģʽʶ������ʱ�����֧��������(Support vector machine��SVM)�������еı������������ӳ���������Ϊ������ϵͳ��ģ�ṩ���µ�˼·�ͷ���[10]����20����90�����SVM�õ����ǵĹ�ע������Ѹ�ٷ�չ�����ƣ�Ŀǰ��SVM�ڹ��̽�ģ��ϵͳ��ʶ�������Կ��ƺ�����ϵ����õ��˹㷺Ӧ�ã���ʹ�ö�SVM���о�������Ҫ�����ۼ�ֵ��������[11]��
SVM�ǻ���VC���ۺͷ��սṹ��С�����ѧϰ��������ѧϰͳ�����۵���Ҫ��ɲ��֡���������Կɷ�������з������������Բ��ɷֵ������ͨ��������ӳ�䣬�ѵ�ά������ռ����Բ��ɷֵ�����ӳ�䵽һ����ά��������ά�������ռ�ʹ�����Կɷ֣�ʹ�������ռ��п���Ӧ������ѧϰ���ķ�����������ռ��еĸ߶ȷ����Է���ͻع����⡣SVM��������������Ϣ��ģ�͵ĸ�����(�����ض�ѵ��������ѧϰ����)��ѧϰ����֮��Ѱ��������У����ڻ����ǿ���ƹ�������
����������ȣ�SVM���Զ�����ѵ����ȷ��ģ�͵Ľṹ�Ͳ�����ģ�Ͳ����٣����ҿ��Աƽ�����һ������Ժ�����ͬʱ�������ٶȿ죬������������һ������ֲ��⣬���ƹ�����Ҫ���������������һЩѧϰ���������⣬���˷��˴�ͳͳ��ѧ�о���������Ŀ���������ʱ�������۵������Լ���������Է���(���˹������������Ҫȷ������ṹ����ѧϰ���ڷ������Ż������еľֲ���С������)���ڽ��С�����������ԡ���άģʽʶ��������б��ֳ��������е����ƣ����ܹ��ƹ�Ӧ�õ�������ϵ����������С�
1998�꣬Drezet & Harrison���SVM���������Ի������ϵͳ�Ľ�ģ����SVM�ȿ��������Զ�̬ģ�Ͳ����Ĺ��ƣ�Ҳ�����ڷ�����ģ�ͽṹ��ȷ ��[12-13]�������Զ�̬ϵͳ��ģ�ͺ�����ʽ�кܶ��֣�����SVM��Ԥ��ģ��ͨ�����õ�ģ�ͺ���Ϊ��
![]() (12)
(12)
��ʽ(12)����һ���ع�ʸ����
![]() (13)
(13)
��ģ�ͺ�����Ϊ��
![]() (14)
(14)
��ģ������ȷ��fSVM(��)�ľ�����ʽ�Ͳ���ʸ���ȵľ���ֵ��ֻҪ�ѻع�ʸ����(k)�����ֵ![]() ������SVMѵ��������(x��y)��������ϵͳ��ģ�����⼴�ɿ����ع�֧�����������⣬����ģ�Ĺ��̾���֧����������ѵ�����̡���ģԭ����ͼ3��ʾ��
������SVMѵ��������(x��y)��������ϵͳ��ģ�����⼴�ɿ����ع�֧�����������⣬����ģ�Ĺ��̾���֧����������ѵ�����̡���ģԭ����ͼ3��ʾ��
Ӧ��ע����ǣ���������ģ�ͽṹʱ���ع�ʸ��(������m��n)��ȷ���ر���Ҫ���ع�ʸ����ѡ���ɱ��ض���Ľ״ξ�������ϵͳ�Ľ״ι��ƹ��ͣ���ģ���Ȳ�������ϵͳ�Ľ״ι��ƹ��ߣ�������ӱ�ʶ�ļ�������ʹ����ģ�͵ķ���������Ԥ��ľ��Ȳ�������֪��ϵͳ���̵��������ʣ���ɸ�������������ȷ��ϵͳ�Ľ״�[14]��
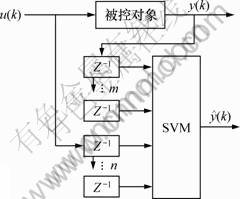
ͼ3 ����SVM��ϵͳ��ģԭ��ͼ
Fig.3 System modeling algorithm based on SVM
SVM�ڽ�ģ����������ŵ㣬ʹ�����ڷ�����Ԥ������еõ���Խ��Խ����о���Ӧ�á�������Ȼ����һЩ���⣬���磬SVMѵ���㷨����ȡһ�����ι滮������ʵ�ֵģ���ѵ����������ʱ��SVM����ά�����ѣ�������ѵ�������⣬SVM������Ϣһ�㲻�ܽ�������Ϣ�ռ�ά������������Ϣ�ռ�ά���ϴ�ʱ���ͻᵼ��SVMѵ��ʱ�����ӡ�����ԭ���������Ľ���SVM�㷨������Gretton��Scholkopt����Ħ�-SVM�㷨Ӧ�õ���Һѹ�������ֱ۵Ķ�̬��ģ���������������ģ�͵�Ч�����ڵ�����sigmoid������ģ�͡�1999�꣬Suykens[15-16]�ڴ�ͳSVM�Ļ����ϣ��������С����֧��������(Least Squares Support Vector Machines����LS-SVM)����[17]�����Ľ�ϵ�ǰ���о��ȵ㣬��Ҫ��Խ���������С����֧����������ģ�ͽ���˵����
��С����֧����������ѵ������Ҳ��ѭSVM�㷨�Ľṹ������С��ԭ��SVM��Ŀ�꺯���IJ���ʽԼ����Ϊ��ʽԼ�����������ι滮����ת����������Է����飬�������������ƫ���һ�η���Ϊ���η��������˲�������ʧ����������˸��Ӷȣ��ڷ�����Ԥ����Ʒ�����������ƣ�ͬʱ��������д��ڵ�³���ԡ�ϡ���Ժʹ��ģ��������⣬�������ٶȸ���һ���֧��������[18]�����¾���˵������LS-SVM�Ľ���Ԥ��ģ�͵Ĺ��̡�
����ѵ��������{(x1,y1)��(x2,y2)������(xl,yl)}������i=1��2������l��![]() �ǵ�i���������������ݣ�
�ǵ�i���������������ݣ�![]() ����Ӧ����������ڷ�����ϵͳ������������ʽ�ĺ�����δ֪�������й��ƣ�
����Ӧ����������ڷ�����ϵͳ������������ʽ�ĺ�����δ֪�������й��ƣ�
![]() (15)
(15)
ʽ�У�Ȩʸ��![]() ����ԭʼ�ռ䣻b��ƫ���������߾��Ǵ�ȷ���IJ�����
����ԭʼ�ռ䣻b��ƫ���������߾��Ǵ�ȷ���IJ�����![]() �ǽ�ԭʼ�ռ����������ӳ�䵽��ά�����ռ䡣LS-SVM���Ż����ⱻ����Ϊ��
�ǽ�ԭʼ�ռ����������ӳ�䵽��ά�����ռ䡣LS-SVM���Ż����ⱻ����Ϊ��
![]() (16)
(16)
�����ʽԼ����
![]() (17)
(17)
���У�CΪ��������ei�ǵ�i�����ݵ�ʵ�������Ԥ�����֮�����Ŀ�꺯���ĵ�1���Ӧģ�͵ķ�����������2��˵����ģ�͵ľ�ȷ�ԣ�������C��Ϊģ�ͷ��������;���֮���һ�����в���������Ϊ������
���������Ż������Lagrange������
![]() (18)
(18)
ʽ�У���iΪLagrange���ӣ�![]() ��������������������L���ڱ�����ƫ�ֿɵã�
��������������������L���ڱ�����ƫ�ֿɵã�
 (19)
(19)
����![]() ����ˣ�
����ˣ�![]() ��Lagrange���Ӧ�i�Ͳ�����0����LS-SVM������ϡ���ԡ���ȥ�����������еı���w��ei���ɵþ���[19]��
��Lagrange���Ӧ�i�Ͳ�����0����LS-SVM������ϡ���ԡ���ȥ�����������еı���w��ei���ɵþ���[19]��
![]() (20)
(20)
ʽ�У�![]() ��
��![]() ��
��![]() ��Il��l��l�ĵ�λ��
��Il��l��l�ĵ�λ��![]() ��
��![]() Ϊ��ѡ�˺� ��[20]���������
Ϊ��ѡ�˺� ��[20]���������
![]()
���棬���������b�Ľ��������ͨ����ʽ�õ���
![]() (21)
(21)
���տɵ�LS-SVM����ģ�͵ı���ʽΪ��
![]() (22)
(22)
����LS-SVM�ķ�����ϵͳԤ��ģ�Ϳ��ƣ���ʹ������������ʱ�����ʶ����Ҳ����������ġ���SVM�Ķ��ι滮Ѱ��������ȣ������������ڴ������Ƿdz��͵�[21]�����ԣ�����LS-SVM��Ԥ���������ֵ���о���
5 ����
Ԥ����Ƶ��㷨�������Ѿ���չ����ʮ�֣������㷨���õ�Ԥ��ģ�Ͷ�������ͬ������ϵͳ������Ԥ��ģ���ڹ�ҵ���̿����е���Ҫ�ԡ�����Ԥ��ģ�������õľ��巽���Լ����ַ�����������������ȱ�㡣���ܼ����ķ�չ��Ԥ����ƵĽ�ģ���������һ���µ��о��߶ȣ���δ����ϵͳ��ģ�����У������������ۺ��㷨�Ľ�Ͻ��н�ģ���DZ�Ȼ���ƣ�����ģ���㷨���˹������硢����Ӧ�㷨���Ŵ��㷨�Լ�֧�����������Ƚ��㷨֮��Ľ�ϣ�ʹ����������ģ���ӱƽ���ʵϵͳ���Ӷ�Ԥ��ģ���������ܻ�����չ���������ơ�
�ο����ף�
[1] ����. ����֧���������ķ�����ϵͳ��ģ�����[D]. ����: ����������ѧ, 2006: 5-44.
GAO Yi. Nonlinear system identification and control based on support vector machine[J]. Xi��an: Xi��an University of Technology, 2006: 5-44.
[2] ����Զ. ��ҵ����ϵͳ��Ԥ�����[J]. ���ƹ���, 2010, 17(4): 407-415.
LI Shao-yuan. Model-based predictive control for industrial process: A survey[J]. Control Engineering of China, 2010, 17(4): 407-415.
[3] ١����. ����������ķ�����Ԥ����Ƶ��о�[D]. ����: ����������ѧ, 2005: 4-18.
TONG Zhe-qiong. Study of predictive control based on neural network in nonlinear system[D]. Dalian: Dalian University of Technology, 2005: 4-18.
[4] �����. ����BP������ģ�͵ķ���������Ԥ�����[D]. �Ͼ�: �Ͼ�������ѧ, 2003: 11-39.
REN Tian-rui. Engine idle speed predictive control based on BP neural network[D]. Nanjing: Nanjing University of Science and Technology, 2003: 11-39.
[5] �½���. ����������ķ�����Ԥ������о�����Ӧ��[D]. ����: ����������ѧ, 2007: 9-56.
CHEN Jian-hua. Research and application of predictive control for nonlinear systems based on neural network[D]. Beijing: North China Electric Power University, 2007: 9-56.
[6] �����. �����������Ԥ����Ʒ����о�[D]. ����: ����ʯ��ѧԺ, 2005: 5-50.
DUAN Xiang-jun. Study of predictive control based on neural network[D]. Daqing: Daqing Petroleum Institute, 2005: 5-50.
[7] �����. һ�������ϵͳԤ������еĽ�ģ����[D]. ������: ��������ҵ��ѧ, 2008: 11-73.
LUO Qiu-bin. Modeling problems in nonlinear predictive control[D]. Harbin: Harbin Institute of Technology, 2008: 11-73.
[8] ����. ������ϵͳ��ģ��Ԥ��������������о�[D]. ����: �㽭��ѧ, 2004: 2-95.
LIU Bin. A study on nonlinear system modeling and predictive control[D]. Hangzhou: Zhejiang University, 2004: 2-95.
[9] ����Ƽ. T-Sģ��ģ�Ϳɱ�ʶ��������Ӧ��[D]. ����: ����������ѧ, 2008: 2-14.
DING Dan-ping. T-S, Identifiable conditions of T-S fuzzy model and its application[D]. Dalian: Dalian University of Technology, 2008: 2-14.
[10] �����, �ܴ���, �̴���. ֧�������������Ա�ʶ����Ƹ���[J]. ս���������Ƽ���, 2009, 31(2): 28-32.
WU Jin-hua, ZHOU Da-wang, CHENG Chun-hua. Summarize of support vector nonlinear system identification and control[J]. Control Technology of Tactical Missile, 2009, 31(2): 28-32.
[11] ��峬. ������С����֧���������ķ�����Ԥ�����[D]. ����: �й�ʯ�ʹ�ѧ, 2010: 8-15.
SUN Feng-chao. Nonlinear model predictive control based on least squares support vector machine[D]. Beijing: China University of Petroleumn, 2010: 8-15.
[12] ���ܾ�. ֧�������������ܽ�ģ��ģ��Ԥ������е�Ӧ��[D]. ����: �㽭��ѧ, 2007: 8-104.
BAO Zhe-jing. Applications of support vector machine in intelligent modeling and model predictive control[D]. Hangzhou: Zhejiang University, 2007: 8-104.
[13] Bao Z J, Pi D Y, Sun Y X. Nonlinear model predictive control based on support vector machine with multi-kemel[J]. Chinese Journal of Chemical Engineering, 2007, 15(5): 691-697.
[14] �κ���, ������. ����֧����������Ԥ������㷨[J]. ��ؼ���, 2006, 25(4): 59-61.
SONG Hai-bin, LIU Yun-guo. Prediction and control method based on support vector machine[J]. Measurement and Control Technique, 2006, 25(4): 59-61.
[15] Suykens J A K. Least squares support vector machines for classification and nonlinear modeling[J]. Neural Network World, 2000, 10(1): 29-47.
[16] Suykens J A K. Support vector machine: A nonlinear modeling and control perspective[J]. European Journal of Control, 2001, 7: 311-327.
[17] ��Ρ, �����. ������ģ��Ԥ����Ƶ������㷨����[J]. ϵͳ����ѧ��, 2008, 20(24): 6581-6586.
JIAO Wei, LIU Guang-bin. Overview of intelligent algorithms in nonlinear model predictive control[J]. Journal of System Simulation, 2008, 20(24): 6581-6586.
[18] ��Ƽ. ������С����֧���������ķ����Թ���Ԥ�����[D]. ̫ԭ: ̫ԭ������ѧ, 2010: 19-64.
CHENG Ping. Generalized predictive control algorithm based on least squares support vector machine[D]. Taiyuan: Taiyuan University of Technology, 2010: 19-64.
[19] ���, ������, ������. ������С����֧����������Ԥ�����[J]. ���㼼�����Զ���, 2009, 28(1): 32-36.
LI Hai-sheng, ZHONG Zhen-yu, ZHANG Yan-lin. Predictive control based on least squares support vector machine[J]. Computing Technology and Automation, 2009, 28(1): 32-36.
[20] ������. ��С����֧����������ģ��Ԥ������㷨�о�[D]. ����: �㽭��ѧ, 2008: 4-48.
LI Li-juan. The study of modeling Algorithm based on LS-SVM and predictive control algorithm[D]. Hangzhou: Zhejiang University, 2008: 4-48.
[21] �°���. ��С����֧�������������ڹ�ҵ���̽�ģ�е�Ӧ��[D]. ����: �㽭��ѧ, 2006: 47-74.
CHEN Ai-jun. The study of least squares support vector machine and its application in industrial process modeling[D]. Hangzhou: Zhejiang University, 2006: 47-74.
(�༭ ����ƽ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
ͨ�����ߣ��º���(1984-)��Ů�����ɹų���ˣ�˶ʿ�о��������´����Լ�����ṹ��Ķ�����λ���Ƚ����Ʒ����о���E-mail��baiyin_hit@yahoo.com.cn
ժҪ����������Ԥ�������Ϊһ����Ч�Ŀ��Ʒ�����Ӧ����������͵Ĺ�ҵ����������ν����ܹ����ӱƽ���ʵϵͳ��Ԥ��ģ�����ΪԤ�����Ӧ��Ч���Ĺؼ�����֮һ�����ĸ��ݹ�ҵ���̿���ϵͳ��չ���ص���о��ȵ㣬���ܽ�������ҵ����������Ԥ����ƵĽ�ģ���⣬����ϵͳ�����˽���ģ�͵ĸ������ԭ�������Ը��ַ��������������������Լ���ȱ������ܽ��������ͬʱ����δ��Ԥ������н�ģ������о�����ͷ�չǰ������Ԥ���չ����
