
���ڻ���ϵͳ����Ԫ���Իع�ĵ�Һ�ŷ�ϵͳ�����Թ��Ͻ�ģ
���»�1, 2������1, 2���±���3
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
2. ��������ѧԺ ������Ϣ���������ϵ������ ���ݣ�350108��
3. ��������ѧԺ ���缰�Զ�������ϵ������ ���ݣ�350108)
ժ Ҫ��
��Һ�ŷ�ϵͳ�����Թ��ϣ����һ�ֻ��ڻ���ϵͳ����Ԫ���Իع�ģ�͵ĵ�Һ�ŷ�ϵͳ�����Թ���ģ�͡������Ϊ������Һ�ŷ�ϵͳ�Ĺ�������Ϊ�����ɢ״̬������ѹ��-�����Ĺ۲�ģ�ͣ��Խṹ����Ϊ�ع�ϵ���������������ݵ����Իع������ʶģ�Ͳ�������Ϲ��ϲ���������Һ�ŷ�ϵͳ�Ĺ���ģ�͡����ò�����ʶʵ����֤�����IJ�����Ͼ��ȡ��о������������ģ������Ч��Ӧ�������ڲ����Թ��ϵ���ϣ����ܽ����������������ѵ����⡣
�ؼ��ʣ�
��Һ�ŷ�ϵͳ�������Թ���������ϵͳ����Ԫ���Իع���
��ͼ����ţ�TP206.3 ���ױ�־�룺A ���±�ţ�1672-7207(2012)03-0997-08
Parametric fault modeling for electro-hydraulic servo system based on hybrid system and multiple linear regression
JIANG Xin-hua1, 2, ZHOU Li1, 2, CHEN Bing-san3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Department of Electronic Information and Electric Engineering, Fujian University of Technology, Fuzhou 350108, China;
3. Department of Electromechanical and Automation Engineering, Fujian University of Technology, Fuzhou 350108, China)
Abstract: To effectively diagnose the parametric fault of electro-hydraulic servo system, a parametric fault model of electro-hydraulic servo system based on hybrid system and multiple linear regression model was proposed. The procedures are as follows. The operating condition of electro-hydraulic servo system was abstracted to discrete state, and observation model was built on the basis of the relationship between pressure and flow rate. Using structure parameter as regression coefficients, the model parameters were identified by applying multiple linear regression algorithm. An electro-hydraulic servo system fault model was established by combining the fault parameters. The precision of parameter fitting in the method was verified using the parameter identification experiment. The results show that the model proposed can be used to diagnose parametric fault effectively, and the problem of hardness in diagnosing concurrent faults can also be solved.
Key words: electro-hydraulic servo system; parametric fault; hybrid system; multiple linear regression
��Һ�ŷ�ϵͳ��һ���ɵ��źŴ���װ�ú�Һѹ����������ɵķ�������ϵͳ�����ںܶ���ʿ�����Ӧ��λ�ÿ��ƺ������ƣ��磺�ɻ��������Ķ������ϵͳ�������Ķ��ϵͳ���״���ڵ��涯ϵͳ����е��Һѹϵͳ����е�ֿ��ƺ��ֿ�ѧ����װ��(����ģ��ת̨��������̨)�ȡ�Һѹ�ŷ�ϵͳ�������С������С������С���ɿ��Ժá�������ʴնȴ�(�����λ�����⸺��Ӱ��С)����λȷ���ŵ㡣��ȱ���Ǽӹ��Ѷȸߣ�����Ⱦ��������ԣ������ʷdz��ߣ�������������࣬����ԭ��Ҳ������ɫ�������˹������ά����ϱȽ����ѡ�Ϊ����ߵ�Һ�ŷ�ϵͳ�İ�ȫ�ԡ��ɿ��ԺͿ�ά���ԣ���������ϼ�������ϵͳ�У����ù�����ϻ���ֱ�ӽ��й��϶�λ�����ϸ��룬����ָ���û��ų����ϣ����ɾ�����Ҫ���塣����ʤ��[1-3]������Һѹϵͳ���ܹ�����Ϸ����о�����Щ�����ڵ�Һ�ŷ�ϵͳ��������еõ���Ӧ�á���ͳ�Ĺ��ϼ�����Ϸ������ڹ���ģ�ͣ�����Һ�ŷ�ϵͳ���л�Һ��ϡ�ʱ���ԡ������Ե����ԣ��������Խ�ģ�Ĺ��̣�������ڹ���ģ�͵Ĺ�����Ϸ�������Ӧ����Һѹ������ϣ���ˣ�һЩ�о����������ʵ�齨ģ�Ĺ��ϼ�����Ϸ������磺Wang��[3-4]����˼��ֻ��ڹ�����������ͳ�Ʒ����ĵ�Һ�ŷ�ϵͳ�������ģ�ͣ���Щģ���Իع�ϵ��Ϊ���ϲ�����ʹ��ʵ������ѵ���õ�ϵͳ�Ĺ������ģ�ͣ�Sepasi��[2, 5]ʹ���˲����в���Ϊ���ϲ������й��Ϸ��ࡣ�����о����ù����������ݽ���ʵ�齨ģ����������ʵ�齨ģ����������ʵ�齨ģ��Ҫ�о�ϵͳ��ʶ���⣬�ⷽ����о���������Ծ����ģ���ҵ��ܹ���Ч��ʶϵͳ�����ķ�������ȡ����һЩ�ɹ������У���С���˷���Ϊ����Ϣ���������ı�ʶ�������ڵ�Һ�ŷ�ϵͳ������ʶ�еõ�Ӧ��[6]������Ⱥ��[7]�����С�� �˷�������������ߵ�Һ�ŷ�ϵͳ�����Բ�����ʶ���ȡ����ڶ��������IJ�����ʶ���⣬���������������֮��Ĺ�ϵ����δȷ��ʱ��ƫ��С�����㷨�����ڽ���Һѹϵͳ�������������������ı�ʶģ ��[8-12]��������ȷ���������������֮��Ĺ�ϵ���ͣ����Ԫ���Իع�ͷ����Իع��㷨�ܸ��õ���ϲ�����Ϊ����߲�����ʶ�������ϵľ��ȣ��������߶Զഫ������Ϣ�ںϵĵ�Һ�ŷ�ϵͳ������ʶ����������������о������һ�ֻ��ڻ���ϵͳ����Ԫ���Իع�ģ�͵Ĺ���ģ�ͣ��������û���ϵͳ���ۣ��Ե�Һ�ŷ�ϵͳ�Ĺ�������Ͻ��г��������ڻ���ϵͳ�ĵ�Һ�ŷ�ϵͳģ�ͣ��Ӷ�ȷ���������������֮��Ĺ�ϵ����Σ����ö�Ԫ���Իع��㷨��ʶϵͳ�������������Ϲ۲�ģ�ͣ�������ýṹ��������ʵ����������ʵ����֤��ģ���ڹ��ϲ�����ⷽ�����Ч�ԡ�
1 ���ڻ���ϵͳ�ĵ�Һ�ŷ�ϵͳģ��
1.1 ����ϵͳ����
���ݻ��Ӷ�̬ϵͳ������[9]��Һѹ�ŷ�ϵͳ���Ӷ�̬ϵͳ���Ա�������һϵ�м��ϣ�H = (Q, X, ��, I, E, f)�����У�QΪ������ɢ״̬�������ϣ�XΪ����״̬�������ϣ���Ϊ������ɢ״̬��Ǩ���¼����ϣ�IΪϵͳ�ij�ʼ״̬��EΪ��ɢ״̬֮��ı�Ǩ���ϣ�f Ϊ״̬��������������ֻ��߲�ַ��̡�
�������ڻ���ϵͳ��Һѹϵͳ��һ��ģ�����£�
![]()
![]() (1)
(1)
���У�![]() ��ʾϵͳ������״̬��
��ʾϵͳ������״̬��![]() ��ʾϵͳ����ɢ״̬��B��CΪ״̬����Ϳ��ƾ���utΪ���Ʊ�����������g: Rn��Q�� R��Qȷ����tʱ�̴��ڼ���״̬��������ϵͳ(��ȷ����ɢ�¼�)��
��ʾϵͳ����ɢ״̬��B��CΪ״̬����Ϳ��ƾ���utΪ���Ʊ�����������g: Rn��Q�� R��Qȷ����tʱ�̴��ڼ���״̬��������ϵͳ(��ȷ����ɢ�¼�)��
1.2 ��Һ�ŷ�ϵͳ�Ļ���ϵͳģ��
��Һ�ŷ�ϵͳ��Ҫ��Һѹ�á��ŷ��Ŵ������������������������������Զ����Ƶ�������ɡ��ջ��ṹ�ĵ�Һ�����ŷ�ϵͳ�ɶ���Դ����Ϊ����Ԫ���ıջ�����������Ϊ��������Ԫ����Һѹ��Һѹ��������ɣ���ͼ1��ʾ��

ͼ1 ��Һ�ŷ�ϵͳԭ��ͼ
Fig.1 Schematic diagram of electro-hydraulic servo system
��Һѹϵͳ��ѹ����ʾǣ����������������ʾǣ���ٶȡ�����ǣ�������ٶȵı仯������ɶ�Һѹϵͳ��Ҫ���������á�������ŷ�ϵͳ�Ĺ���״�������жϡ�ϵͳ���е���Ҫģʽһ��������������١����١����ٺ�ֹͣ�ȡ���ϵͳ������Щ��ɢģʽʱ��������������ij�ֹ��ɣ���״̬���̵�Լ���������仯���γ�һ���������������ԣ�Һѹ�ŷ�ϵͳʵ������һ�����͵Ļ���ϵͳ�����Դӻ���ϵͳ�ĽǶ�������Һѹ�ŷ�ϵͳ�ı仯���ɡ����Ʋ����Լ�������ϵȡ�
��1 ��Һ�ŷ�ϵͳ����ɢ״̬
Table 1 Discrete states of electro-hydraulic servo system
��Һѹϵͳ��5����ɢ����״̬�����������١����١����ٺ�ֹͣ�ֱ��Ϊq1��q2��q3��q4��q5��5����ɢ״̬��ϵͳ״̬�ñ�1������
1.3 ��Һ�ŷ�ϵͳ�Ĺ��ϲ���
���ڻ���ϵͳH=(Q, X, ��, I, E, f)�����Զ���Һѹ�ŷ�ϵͳ״̬�����仯�����µ���ɢ�¼�������״̬��Ǩ����ɢ�¼��ɷֳ�2�ࣺҺѹϵͳ��״̬(ѹ�����������ٶ�)�������������Һѹ�ŷ�����ϵͳ��״̬��أ������������Ŀ����źŹ������������������������������������¼���ǨΪ���Ʊ�Ǩ����������ģʽ����Һѹ״̬��ʱ��������������Һѹ״̬����һ�����������µ��¼���ǨΪ������Ǩ��������Щ��ɢ�¼�������Һѹϵͳ����ɢ�¼�ȫ������������={��1, ��2,��, ��k}�������¼�![]() ������ϵͳ�����������¼���Ҳ�����ǹ����¼�����һ���棬ϵͳ��״̬QҲ����������ģʽ����ģʽ����ˣ�����ϵͳ�Ĺ��ϱ���Ϊ����ģʽ�����¼���
������ϵͳ�����������¼���Ҳ�����ǹ����¼�����һ���棬ϵͳ��״̬QҲ����������ģʽ����ģʽ����ˣ�����ϵͳ�Ĺ��ϱ���Ϊ����ģʽ�����¼���
1.3.1 ����ģʽ��صĹ��ϲ���
�������ϵͳģʽ����Ϊ��Q=QN![]() QF(���У�QN��ʾϵͳ��������ģʽ��QF��ʾϵͳ����ģʽ)����һ������£�ÿ����ɢģʽ����Ӧһ����̬�������̣�
QF(���У�QN��ʾϵͳ��������ģʽ��QF��ʾϵͳ����ģʽ)����һ������£�ÿ����ɢģʽ����Ӧһ����̬�������̣�
![]() (2)
(2)
���У���qΪ���ϲ�����Ϊ��������ʵ������q��R���� 0�ܦ�q��1����q�ʦ�q����q��ʾ���ܵĹ��������ӿռ䣬��q�ʦ�q��q��Q�����ֹ���ģʽ�Ĺ��ϲ������ϱ�ʾΪ
![]() (3)
(3)
����Һѹ��й¶������Һѹϵͳ�������ϣ�Һѹ��й¶�����æ�q��ʾ������q=0ʱ��ʾ��й©��
1.3.2 �����¼���صĹ��ϲ���
�赼����ɢ״̬��Ǩ���¼����Ϧ�=��N+��F�������¼���F��ʾ��Ǩ������ģʽ���¼�����N�¼���ʾ��Ǩ������ģʽ���¼��������ò�������������G(x,��e)X����e���������Ц�e�ʦ�eΪ���ϲ�������e0��ʾ����ϵͳ�¼����������ԣ�ʹ���ӿռ�������Ϧ�e��ʾ���ϼ����e�ʦ�e��e��E�����ֹ����¼��Ĺ��ϲ����ɱ�ʾΪ
![]() (4)
(4)
��ѹ��С��һ��ֵ��eʱ����ʹҺѹϵͳ�������Ŀ���ģʽ��Ǩ������ģʽ���������ֱ�ͣ��
1.3.3 Һѹ���ϲ�����������Ͻ�ģ
������������ģ�ͣ������ɹ���ģʽ�����¼���ɣ�����ʽ(3)��(4)�����Ϊ���¼�����
![]() (5)
(5)
�����ϵͳ�Ĺ��ϼ���ռ䶨��Ϊ
![]() (6)
(6)
��2 Һѹϵͳ���ϲ�����
Table 2 Fault parameters of hydraulic system

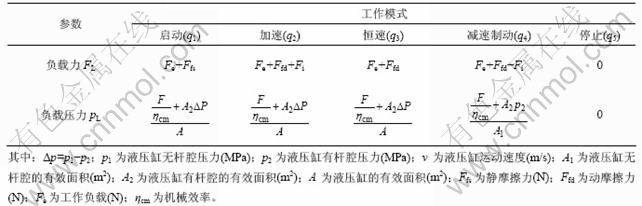
���¼��Ŷ�Ӧ��H��û�й��ϵ������Ҳ������������ϵͳ���������ϡ����ݹ���ģʽ�����¼���ģ�ͣ����ϵ���ʽ����ϵij̶ȿ��ɹ��ϲ����ȱ������ڴ������˵�Һ�ŷ�ϵͳ����5�ֹ�������Ӧ�������ٹ��ϲ�����1����2����3����4�ͦ�5�����2��ʾ��
2 ���ڶ�Ԫ���Իع�ĵ�Һ�ŷ�ϵͳ����ģ��
2.1 ��Һ�ŷ�ϵͳ����ģ��
��Һ�ŷ�ϵͳ����Ҫִ�в�����Һѹ�ף�Һѹ��Ϊ�Գ�Һѹ�ͷǶԳ�Һѹ�ס��ǶԳ�Һѹ��Һ�ŷ�ϵͳ����Զ�ȶԳ�Һѹ��ϵͳ���ӣ�Ϊ����ͨ���ԣ������о��ǶԳ�Һѹ�ĵ�Һ�ŷ�ϵͳ����ģ�͡�
��Һ�ŷ�����ԭ����ͼ2��ʾ�����У�A1��p1�ͦ�1�ֱ�Ϊ��ǻ�����(mm2)��ѹ��(MPa)��Һѹ����(L/min)��A2��p2�ͦ�2�ֱ�Ϊ�и�ǻ�����(mm2)��ѹ��(MPa)��Һѹ����(L/min)��xvΪ���ſ���(mm)��YΪҺѹ��λ��(m)��Һѹ���ص���ƽ�ⷽ��Ϊ��
![]() ��
��![]() ��
��![]() (7)
(7)
���У�mΪ������(N)��BcΪ������(N)��pLΪ����Һѹѹ����Һѹ��Һѹ���������Է���[10]Ϊ��
![]() (8)
(8)
���� ![]() ��
��![]() ��
��![]() ��
��
���У�![]() Ϊ����������KqΪ��������(m2/s)����ʾ����ѹ������ʱ�����������Է�оλ�Ƶı仯�ʣ�KcΪ����-ѹ��ϵ��(m5/(N��s))����ʾ����оλ�Ʋ���ʱ��
Ϊ����������KqΪ��������(m2/s)����ʾ����ѹ������ʱ�����������Է�оλ�Ƶı仯�ʣ�KcΪ����-ѹ��ϵ��(m5/(N��s))����ʾ����оλ�Ʋ���ʱ��

ͼ2 ��Һ�ŷ�ϵͳԭ��ͼ
Fig.2 Schematic diagram of electro-hydraulic servo system
���������Ը���ѹ���ı仯�ʡ�����֮�⣬���迼�Dz���Һ���ѹ�����ܵ��ȵ����ͺ���������֮��������ʽ(8)��дΪ
![]() (9)
(9)
���У�V0ΪҺѹ���ݻ�(m3)����eΪҺѹ�͵ĵ���ģ��(N/m2)����IΪ����������(A)��Һѹ���Ŀ�����xv=IKv��KvΪ�����Ŵ�ϵ��(m/A)���õ���������Ϊ ��
![]() (10)
(10)
��ʽ(6)���Եó��������йصĽṹ����������ѹ��ϵ��Kc����������ϵ��Kq��Һѹ�����Ԧ�e����ˣ���
![]() ��
��![]() ��
��![]() (11)
(11)
���У�X1Ϊ���ſ�����(mm)��X2Ϊ����������Ʋ���(MPa)��X2ΪҺѹ��������Ʋ���(MN��m)���õ����Իع鷽�̵IJ�������ʽΪ��
![]() (12)
(12)
����2�й��ϲ�������ʽ(16)����Һѹϵͳ�������Ϲ۲�ģ��Ϊ��
![]() (13)
(13)
ѹ�����Ϲ۲�ģ��Ϊ��
![]() ���������� (14)
���������� (14)
2.2 ��Ԫ���Իع�ģ��
Һѹϵͳ�Ĺ�����2�֣�һ���Dz����Թ��ϣ���һ���ǽṹ�Թ��ϡ��ṹ�Թ��ϵı������ԣ������Թ�����Ƚ����Σ���ϲ��ף�������Ҫ�о������Թ��ϵļ������ϡ���XΪϵͳ״̬��UΪ���Ʊ� �������ϲ�����q�ʦ�1��![]() Ϊ�۲���������õ�Һѹϵͳ���ϵ�һ�㻯ģ�ͣ�
Ϊ�۲���������õ�Һѹϵͳ���ϵ�һ�㻯ģ�ͣ�
![]() (15)
(15)
ZΪX�릨1����غ�����Z������Һѹϵͳ�Ľṹ�йأ�������Ϊ�ɽṹ�������ɵĺ�����Ϊ�˻�ȡ��Щ�ṹ�������Ӷ���������ģ�ͣ���Ҫ�����������½���ʵ��ģ�͡���UΪ�������XΪ�Ա������۲�n�������㣬�ɴ˹����Ա���������������ݱ�X=[x1, ��, xn]n��U=[u1, ��, um]m��n(���У�mΪ���������)���Խṹ����Ϊ�ع�ϵ����������Ԫ���Իع� ģ�ͣ�
![]() (16)
(16)
![]() Ϊ����ֵ��B=[b0 b1 �� bm]Ϊ�ṹ������
Ϊ����ֵ��B=[b0 b1 �� bm]Ϊ�ṹ������![]() Ϊ�в��
Ϊ�в��
![]() (17)
(17)
��b0, b1, ��, bm�ֱ���ƫ��������ƫ����Ϊ0�����m+1�����淽�̣�
 (18)
(18)
���淽����ľ�����ʽ���£�![]() ��ģ�Ͳ�������С���˹���Ϊ��
��ģ�Ͳ�������С���˹���Ϊ��
![]() (19)
(19)
��������С���˹������߱����ԡ���ƫ�ԡ���С�����ԡ���ʹ��ϵ��R2��ʣ��������ۻع鷽�̵� ���ӡ�
2.3 �������
����ʽ(15)��ģ��Z��ͨ��������i��ӳ������ʽ����ϳ̶ȡ�������Ϲ�����ͼ3��ʾ�����ȣ���ȡ��ͬ�����µĹ۲������Ȼ���۲��������ģ��Z������Ԧ�iΪ�ع�ϵ�����������Իع飬��ʶ���ϲ�����i��

ͼ3 ������Ϲ���ʾ��ͼ
Fig.3 Schematic diagram of fault diagnosis process
3 ʵ������
3.1 �ṹ������ʶ
����ʽ6)��Ϊ�˽���Һѹ�ŷ�ϵͳ����ģ�ͣ���Ҫ��ʶҺѹϵͳ�Ľṹ��������������ѹ��Ϊ�۲������������-ѹ��ϵ��Kc����������ϵ��Kq��Һѹ�����Ԧ�eΪ�Ա�����������Ԫ���Իع�ģ�ͣ��ֱ��ʶ�ڼ��١����١����ٹ����µĽṹ������Һѹʵ���豸�ṹ��ͼ4��ʾ[11]�����õĵ�Һ�������Ʒ��IJ����������3��ʾ��

ͼ4 Һѹʵ��ϵͳ�ṹ
Fig.4 Structure of experimental CAT system
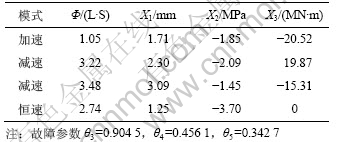
�۲����IJ���Ƶ��Ϊ3 Hz���õ����ٽεIJ���������ͼ5��ʾ�����ٽεIJ���������ͼ6��ʾ���Լ��ٽεIJ������ݴ���Ϊ������˵������ȡ�IJ��ֲ����������4��ʾ�������ݽ��ж�Ԫ���λع�ͳ�ƣ���ʽ(11)�в���X1��X2��X3������ϣ������ͼ7��ʾ��
��3 ʵ�����
Table 3 Experimental parameters


ͼ5 �ƶ��ٶ�v=2 mm/sʱ�IJ���ͼ
Fig.5 Sampling diagram in constant speed of v=2 mm/s

ͼ6 ���ٶȦ�=2 mm/s2ʱ�IJ���ͼ
Fig.6 Sampling diagram in acceleration ��=2 mm/s2
��4 ��=1 mm/sʱ�IJ�������
Table 4 Sampling data in accelerat mode at ��=1 mm/s


ͼ7 ���Իع��㷨���ͼ
Fig.7 Fitting charts of linear regression
�ع�ͳ�ƽ�����£����Իع�ϵ��Ϊ0.989 0������Ŷ�Ϊ0.978 2��������ϵ��R2Ϊ0.961 8��������Ϊ0.056���������������£����ɶ�Ϊ3������Ϊ4.377 5��������Ϊ1.459 1��ϵ��InterceptΪ2.136 3��KqΪ0.784 5��KcΪ7.133 2��10-8��1/��eΪ1.125 3��10-8��
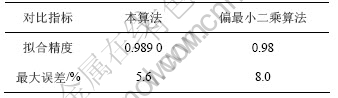
��ΪҺѹ��й©���ϻ����Һѹѹ�����ͣ���ͨ���۲�Һѹѹ������X2���Ի�ȡҺѹй©��������Һѹй©��������ϣ�������ƫ��С�����㷨�����Ч��[12]�ԱȽ�����5��ʾ��
��5 Һѹй©�������Ч���Ա�
Table 5 Comparison of parameter fitting effects
���Իع�ϵ��Ϊ0.989 0(��ȫ��ϵ�ϵ��Ϊ1)��ͼ7Ҳ��ʾ���Ч���ã���ˣ�����ṹϵ����
1/��1=1.125 3��10-8 m2/N��Kq1=0.784 5 m2/s��
Kc1=7.133 2��10-8 m5/(N��s)
ͨ����ͬ�ķ�����ȡ����ģʽ�µĽṹϵ����
1/��2=1.125 3��10-8 m2/N��Kq2=1.942 8 m2/s��
Kc2=4.172 2��10-9 m5/(N��s)
����ȡ����ģʽ�µĽṹϵ����
1/��3=1.125 3��10-8 m2/N��Kq3=0.952 5 m2/s��
Kc3=-5.230 3��10-8 m5/(N��s)
3.2 �������ʵ��
����ȡ�Ľṹ��������ʽ(17)���õ���Һ�ŷ�ϵͳ�������ģ�ͣ�
��L1=0.784 5��5X11-7.133 2��10-8��3X21-1.125 3��
10-8��4X31
��L2=1.942 8��5X12-4.172 2��10-9��3X22-1.125 3��
10-8��4X32
��L3=0.952 5��5X13-5.230 3��10-8��3X23-1.125 3��
10-8��4X33 (18)
��������3�ֵ����ϣ��Ŵ�ϵ��Ư������й¶����Һѹ����Ⱦ������ˣ�������Ҫ����3�β�ͬ�����µ����ݽ��в����������ڴ�ѡȡ2��ʵ��IJ���ʵ��������ϲ�����ȡ������ֱ����6�ͱ�7��ʾ��
��6 ��1�ι������ʵ����
Table 6 Experimental results of first fault diagnosis

��7 ��2�ι������ʵ����
Table 7 Experimental results of second fault diagnosis
�ӱ�6�ͱ�7���Կ������ڵ�1��ʵ���У���Һ�ŷ�ϵͳ����й©�ϴ�Ĺ��ϣ��ڵ�2��ʵ���У���Һ�ŷ�ϵͳͬʱ���ڷŴ�ϵ��Ư�ƺ�Һѹ����Ⱦ���صIJ������ϣ�������ʵ��ϵͳ�Ĺ������ý�����Ǻϡ�
4 ����
(1) ��Ե�Һ�ŷ�ϵͳ������˻��ڻ���ϵͳ�������Իع�ģ�͵IJ����Թ��Ͻ�ģ���������û���ϵͳ���ۣ��Ե�Һ�ŷ�ϵͳ�Ĺ�������Ͻ��г��������ڻ���ϵͳ�ĵ�Һ�ŷ�ϵͳģ�ͣ������ڶഫ������Ϣ��ʹ�ö�Ԫ���Իع��㷨��ʶ����ģ�͡�ͨ���ṹ������ʶʵ����֤�˲�����ʶ�ľ��ȡ�
(2) ��ģ���ܹ���Ч�����ڶ�Һѹϵͳ�Ĺ��ϼ���������ϣ�����ֵ������ʽ��ӳ��Һ�ŷ�ϵͳ����������״̬�����ֵ�Һ�ŷ�ϵͳ�Ĺ����ǽ��䷢���ģ�ͨ��ʵʱ�۲�Һѹ��������������ϲ������ܹ��ڹ������ڷ��ֹ��ϣ���ߵ�Һ�ŷ�ϵͳ�����Ŀɿ��ԡ�
(3) ���ڻ���ϵͳ�������Իع�ģ�͵Ĺ�����ϣ��Զ�����ϲ���Ϊ�ع�ϵ����ͨ���Իع����������ϲ���������Ч����ϳ��������ϡ�
�ο����ף�
[1] ����ʤ, ������, ����Ƽ. Һѹϵͳ������ϼ������о���״�뷢չ����[J]. ��е����ѧ��, 2006, 42(9): 6-13.
ZHOU Ru-sheng, JIAO Zong-xia, WANG Shao-ping. Current research and developing trends on fault diagnosis of hydraulic systems[J]. Chinese Journal of Mechanical Engineering, 2006, 42(9): 6-13.
[2] Sepasi M, Sassani F. On-line fault diagnosis of hydraulic systems using unscented Kalman filter[J]. International Journal of Control, Automation, and Systems, 2010, 8(1): 149-156.
[3] WANG Qing-jun, CHEN Han-xin, Patrick C, et al. Fault detection of water hydraulic motor by demodulated vibration signal analysis with the Hilbert transform and genetic algorithm[J]. Journal of Testing and Evaluation, 2011, 39(2): 12-15.
[4] CAO Ke-qiang, ZHANGJian-bang, HULiang-mou. Fault diagnosis of electro-hydraulic position servo closed-loop system based on support vector regression[C]//IEEE International Conference on Automation and Logistics. 2007: 3044-3049.
[5] ��͢��, ������, ������, ��. ���ڷ����Թ۲�����Һѹ�ŷ�ϵͳ������Ϸ����о�[J]. �й���е����, 2008, 19(13): 1527-1530.
MING Ting-tao, ZHANG Yong-xiang, ZHANG Xi-yong, et al. Nonlinear observer-based fault diagnosis for hydraulic servo systems[J]. China Mechanical Engineering, 2008, 19(13): 1527-1530.
[6] ����, ���պ�, ������. ������С���˷��ı�������ģ�Ͳ�����ʶ[J]. ������Һѹ, 2011, 39(5): 113-114.
JIANG Wei, GAO Qin-he, LI Tian-yi. The modeling and parameters identification of proportional valve based on the LS[J]. Machine Tool and Hydraulics, 2011, 39(5): 113-114.
[7] ����Ⱥ, ������, ��Ӣ��, ��. ���������������ҺѹAGCϵͳ����Ӧ��ʶ[J]. �й���е����, 2004, 15(5): 449-453.
WANG Yi-qun, WANG Hai-fang, GAO Ying-jie, et al. Neural network based adaptive identification for hydraulic AGC system in strip mill[J]. China Mechanical Engineering, 2004, 15(5): 449-453.
[8] ������, ���廪, лϰ��, ��. ����ƫ��С���˻ع���ھ��Һѹϵͳ�������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(6): 1152-1154.
HE Xiang-yu, HE Qing-hua, XIE Xi-hua, et al. Fault diagnosis of excavator hydraulic system based on partial least squares regression[J]. Journal of Central South University: Science and Technology, 2007, 38(6): 1152-1154.
[9] Hancock K M, Zhang Q. A hybrid approach to hydraulic vane pump condition monitoring and fault detection[J]. Trans ASABE, 2006, 49(4): 1203-1211.
[10] ������, ������, ���˴�. Һѹ�ŷ����ظ�̬������ѧ��ģ���������[J]. �Ĵ���ѧѧ��: ���̿�ѧ��, 2008, 40(5): 195-198.
JIANG Gui-yun, WANG Yong-qing, YAN Xing-chun. Mathematics modeling and simulation analysis of dynamic characteristics for hydraulic cylinder controlled by servo valve[J]. Journal of Sichuan University: Engineering and Science Edition, 2008, 40(5): 195-198.
[11] HUANG Yi-jian, CHEN Bing-san, JIANG Yu-yan. Autoregressive bispectrum characteristics of magneto- rheometer[J]. Journal of Central South University of Technology, 2008, 15(1): 225-228.
[12] �����, ������, ����, ��. ����ƫ��С���˷�������ͻ����Һѹ����������[J]. ������Һѹ, 2010, 38(21): 141-144.
DONG Yu-cai, YANG Wan-li, ZHANG Ling, et al. The fault diagnose of advanced amphibious assault vehicle hydraulic motor based on partial least square method[J]. Machine Tool and Hydraulics, 2010, 38(21): 141-144.
�ո����ڣ�2011-05-10�������ڣ�2011-07-28
������Ŀ������ʡ��У��ѧ�����Ƽ��ش���Ŀ(2010H6002)
ͨ�����ߣ����»�(1956-)���У����ϳ�ɳ�ˣ����ڣ���ʿ����ʦ�����¹�ҵ�Զ������������о����绰��0591-88202953��E-mail: xhjiang@fjut.edu.cn
ժҪ��Ϊ����Ч����ϵ�Һ�ŷ�ϵͳ�����Թ��ϣ����һ�ֻ��ڻ���ϵͳ����Ԫ���Իع�ģ�͵ĵ�Һ�ŷ�ϵͳ�����Թ���ģ�͡������Ϊ������Һ�ŷ�ϵͳ�Ĺ�������Ϊ�����ɢ״̬������ѹ��-�����Ĺ۲�ģ�ͣ��Խṹ����Ϊ�ع�ϵ���������������ݵ����Իع������ʶģ�Ͳ�������Ϲ��ϲ���������Һ�ŷ�ϵͳ�Ĺ���ģ�͡����ò�����ʶʵ����֤�����IJ�����Ͼ��ȡ��о������������ģ������Ч��Ӧ�������ڲ����Թ��ϵ���ϣ����ܽ����������������ѵ����⡣
