
������ɫ�������ݶȷ�����������Ӱ����㷨
���Ļ�1, 2���ױ�˳1��Ф��ʤ1��������1
(1. �人��ѧ ������ϢѧԺ������ �人��430072��
2. �й������ع����Ź�˾ ��709 �о��������� �人��430074)
ժ Ҫ��
�������ȵ�һ��������Ч����˶���Ӱ�����⣬���һ�ֽ����ɫ������������Ϣ������Ӱ�����㷨�����ںϲ����ϣ�������Ƶͼ��ͬ������������ӳ̶ȣ�ѡ��ʹ����ɫ��Ϣ���������ݶȷ���ֱ��ͼ���˶���Ӱ���м�⡣ͨ��������֤�������ݶȷ���Ĺ��ղ����ԣ����һ�����ø��������л�����������Ӱ����·���������Ч�˷���ͳ�㷨������Ϊ��С��ⵥλ�����ܵ��������ŵIJ��㡣ʵ�������������㷨�ڲ�ͬ�����±��ֳ��Ϻõ���Ӱ������ܣ�ͬʱ���м��㸴�Ӷȵ͡�ʵʱ�Ժõ��ŵ㡣
�ؼ��ʣ�
Ŀ��������Ӱ�����������ģ����ϸ�˹ģ����
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2013)12-4874-07
Shadow detection algorithm based on color and regional gradient direction features
XIE Wenhua1, 2, YI Benshun1, XIAO Jinsheng1, GAN Liangcai1
(1. School of Electronic Information, Wuhan University, Wuhan 430072, China;
2. No.709 Research Institute, China Shipbuilding Industry Corporation, Wuhan 430074, China)
Abstract: As single features such as color or texture can not be used to detect moving shadow effectively, a method of shadow detection based on color and regional texture was proposed. Through analyzing and proving the illumination invariance of regional gradient direction was proved, and a new texture-based method of shadow detection using this feature was proposed, by this way, the noise effect when using one pixel as the smallest detecting unit in traditional methods can be significantly reduced. Then, in the combination of color and regional texture, the color information or the regional gradient direction histogram was used respectively to detect moving shadow according to the complexity of texture in different image areas. The results show that the proposed algorithm is effective in detecting shadow under different scenes, meanwhile, it has characteristics of low computational complexity and excellent real-time ability.
Key words: target detection; shadow detection; background modeling; Gaussian mixture model
�˶�Ŀ����ȡ����Ƶ���ϵͳ�е�һ����Ҫ���ݡ��ںܶ�ʵ�ʳ����У����������ڵ����߲�����Ӱ���˶��ָ��仯��ⷽ������˶����弰���������Ӱһ����ȡ������������ɴ�����˶�Ŀ�궨λ���ָ�����Լ����ࡣ��ˣ��˶���Ӱ�ļ��������ѳ���Ƶ��ؼ����е�һ����Ҫ����[1-4]�����е���Ӱ����㷨����ɷ�Ϊ2�ࣺ����ģ�͵ķ����ͻ��������ķ���[5]�����У�����ģ�͵ķ���ͨ����Ҫ����֪ʶ����������һЩ����ij��������������һ��ϸ��ӣ�������ʵʱ��Ӧ�ã����������ķ���һ��ֱ�Ӳ���ͼ�������������ɫ����������Ϣ�����ж�[6]�����磬������Ӱ����ı������DZ�����ɫ�����������ǿ�Ⱥͱ��Ͷȵ����ԣ���HSV��ɫ�ռ�����Ӱ[7]�����þֲ���ɫ��������RGB�ռ�ʵ����Ӱ���[8]��������Ӱ������������������ֲ�����ص㣬�ֱ����GaborС���仯�;ֲ���Ԫͼ(LBP)����Ӱ���м��[9-10]������������ɫ�ķ����Զ�̬�����Ĺ��ձ仯��Ϊ���У�Ϊ�ˣ�����GaborС���任��ֲ���Ԫͼ(LBP)����Ӱ���м�⡣�����������ķ����ڽ�Ϊƽ̹������������Ƿ�ѣ���ˣ�������1������������Ч�����Ӱ����������һЩ��϶�����������˶���Ӱ���·�����������GaborС���任�������ɫģ���������Ӱ�������ַ������㸴�ӶȽϸ�[11]���ں���ɫ���ݶ��������˶���Ӱ��������������������Ϊ��С��ⵥλ�������ܵ���������[12]��Ϊ�ˣ������������һ�ֻ�����ɫ�������ݶȷ����������˶���Ӱ������㷨�������������ӳ̶��ڲ�ͬ����������ɫ���������ݶȷ���ֱ��ͼ������Ӱ��⡣
1 ������ɫ�������˶���Ӱ���
��ɫ�����������������Ӱ��Ŀǰ����������Ȼ���ò�ͬ����ɫ�ռ䣬������ԭ���������˶���Ӱ���串�ǵı���������Ⱦ������Ƶ�ɫ�Ⱥͱ��Ͷȶ����ȱ䰵��һ�ص㡣
1.1 ǰ������ȡ����Ӱ��ɫģ�͵Ľ���
���û�ϸ�˹ģ������ȡǰ������ǰ����ȡԭ���Ƕ�ÿһ���ص�����ʱ�̸��µĸ�˹���ģ�ͼ�¼����ɫ����ʷ��Ϣ��ͬʱ���û��ģ�͵�1���Ӽ���Ϊ����ģ�ͱ��������������»�ȡ��1֡ͼ������ǰ���ص����ɫ����������Ӧ�ı���ģ����ƥ�䣬���ж�Ϊ�����㣬����Ϊǰ���㡣һ��ȡ����ģ����Ȩ�������Ǹ�ģ�͵�R��G��B��3ͨ���ľ�ֵ�����ؽ�������
��ͨ������£������˶�Ŀ��Ͷ�����Ӱ���������ڱ�������ˣ�����Ϊǰ������ϸ�˹��ģ������ȡ����������ϸ�˹��ģ��������ȡ����ǰ�����ֲ��������˶�Ŀ�꣬���Ұ����˶�Ŀ��Ͷ�����Ӱ�����ĵ���Ӱ���������ȡ����ǰ�������Ͻ��С�
Ϊֱ�����û�ϸ�˹������ģ���м������Լ��ټ�������������Ӱ����㷨������RGB�ռ䡣��Ӱ��ɫģ�Ͳ�����rR��rG��rB�ͦ�R����G����B�����У�rR��rG��rB�ֱ�Ϊ��Ӱ������R��G��B��ɫͨ��������ƽ��ֵ����R����G����B�ֱ�Ϊ��Ӱ������R��G��B��ɫͨ�������ȱ��
1.2 ������ɫ��������Ӱ����㷨
SNP(statistical non-parametric)����[13]��һ�־�����Ч����Ӱ��ⷽ����ͨ���Ƚϵ�ǰ����ͼ����������ֵ���ع�����ͼ����ͬλ����������ֵ���������ͼ����������Ӱ�����ĸ���SNP�㷨��˼�룬�������²��������Ӱ��⣺
(1) �����ǰ���㴦�Ĺ��ձ仯�̶ȡ����赱ǰ֡������ȡ��ǰ�������ڴ���һ��J(x��y)����R��G��B 3��ͨ�������ȷֱ�ΪFR��FG��FB��ͬʱ����õ�����Ӧ���ؽ�����ͼ������ͬλ�ô�������ֵΪBR��BG��BB���������ȱ仯ϵ����Ϊ
 (1)
(1)
���ȱ仯ϵ���ѵĺ��������ǰ֡��J(x��y)���������仯�̶ȣ�����1˵�����ؽ�������ȸõ������ֵԽ��������Խ������֮��С��1��˵���õ�䰵����ֵԽС�������Խ����������Ӱ�ĸ��ǻ�������Ƚ��ͣ���ˣ����ѡ�1��˵����J(x��y)��Ȼ��������Ӱ���������˶�Ŀ�걾���������жϽ�����ֱ�ӷ��أ�����1���ѣ�1������˵����J(x��y)Ϊ��Ӱ�㣬ת�벽��(2)���н�һ���жϣ��������ަ�1��ѡȡ��Ϊ��С�����ĸ��ţ�һ��ȡ0.3���ҡ�
(2) ������Ӱ���ɫ�ʱ仯�������һ���жϸõ��Ƿ�Ϊ��������Ӱ�㡣���ȣ�����ʽ(2)�ֱ�������Ӱ��R��G��B 3��ͨ������ɫ������ؽ������и�λ�õ���ɫ�仯�����
 (2)
(2)
ʽ�У�CiΪiͨ������ɫ�仯����iΪR��G��B�����ȱ仯ϵ������ʽ�е�������Ϊ�������ձ仯��Ӱ�졣�������ͨ������ɫ�仯���������ʽ����Ӱ�жϣ�
 (3)
(3)
ʽ�У�S(x��y)��ʾ��ǰ֡������(x��y)�����б�����1��ʾ��Ӱ���أ�0��ʾ�˶����壻��R����G����B�ֱ�Ϊ�ɻ�ϸ�˹������ģ�õ����ؽ�����������(x��y)��R��G��B 3��ͨ������ɫ�仯�����Ϊ�������ӣ�ȡ2.5~3.0֮�䡣
������ɫ����Ӱ����㷨�Զ�̬�����Ĺ��ձ仯��Ϊ���У����ҵ��˶�Ŀ���ϵIJ������ص���к���Ӱ���Ƶ���ɫ����ʱ�����������������Щ���ص�����Ϊ��Ӱ�����⣬�����������У����������ަ�1������ʹ����������ǿ����Ӱ����ˣ�Ϊ��ø��õ���Ӱ���Ч��������ʹ������������ʵ����Ӱ��⡣
2 ���������ݶȷ���ֱ��ͼ����Ӱ���
����������Ĺ������ԣ����к�ǿ���ȶ��ԡ��ڴ���������У��˶�����ͱ���֮���������Բ�ͬ���������������˶�������Ͷ�����Ӱ����ı䱳�����������ԣ���ˣ�����������һ�ص���ʵ����Ӱ��⡣�������ݶȷ����DZ�����������Ҫ������Ϊ����㷨�Ŀ��������ܣ��ڻ���������������Ӱ����㷨�У����ô�������ص������ڵ��ݶȷ���ֱ��ͼ���ǵ������ص��ϵ��ݶȷ�����ʵ�֡�
2.1 �����ݶȷ���ֱ��ͼ
���Դ�������ص�Ϊ���ĵľ��������������Ȥ����(ROI)������w��h�ֱ��ʾROI�Ŀ��ߣ�w��h�ĺ���ȡֵ����Ƶͼ��Ĵ�С�йء�����I(x��y)ΪROI��λ�ڵ�(x��y)�������صĻҶȣ���ROI���ݶȷ���ֱ��ͼ��ͨ�����²�����á�
(1) �����ݶ�ģ��[-1��0��1]����ROI�и�����ݶ�ֵ��
 (4)
(4)
ʽ�У�Gh(x��y)��Gv(x��y)�ֱ��ʾ�õ���ˮƽ����ʹ�ֱ�����ϵ��ݶȡ�
(2) ����(x��y)�����ݶ�ǿ��M(x��y)���ݶȷ����(x��y)��
 (5)
(5)
Ϊ����ݶȷ���ֱ��ͼ�Ŀ����ԣ���ȡ�ݶȷ���ʱ����[0����]�ķǷ��ŷ���ռ䣬��ʱ�ݶȷ����Ϊ��
 (6)
(6)
(3) ����ͬ������ݶ���ɢ�ػ��ֵ���Ӧ��ֱ��ͼ�����У�������һ�����������ֱ��ͼ�Ĺ���������������ֱ��ͼH���ܼ���ΪN�������ݶȷ����ȡֵ�ռ�[0����]�ȷ�ΪN��bins����ֱ��ͼ�Ĺ�������ʽ���У�
 (7)
(7)
ʽ�У�m=0��1������N-1��Ϊֱ��ͼ�ļ�������ΪKronecker delta������
2.2 �����ݶȷ���ֱ��ͼ�Ĺ��ղ�����
Ϊ֤���ݶȷ���ֱ��ͼ�Ĺ��ղ����ԣ�����������Ӱģ�ͣ���I(x��y)��λ��(x��y)�����ص�����ȣ�E(x��y)��ʾ�õ�ķ���ȣ���(x��y)��ʾ�õ㴦�ķ����ʣ���I(x��y)������ʽ��ʾ��
 (8)
(8)
���ǹ�ԴΪ�չ⣬�����λ�ù̶��������ǿ��E(x��y)�ɽ���Ϊ��
 (9)
(9)
ʽ�У�CAΪ������ǿ�ȣ�CPΪ��Դǿ�ȣ���Ϊ������߷����������淨�߷���֮��ļнǣ�����ͬһ������ͬһĿ���������Ӱ������Ϊ��Ϊ��������һ��С�����ڣ��ɽ�����Ϊ���㴦��CA��CP�ͦշֱ���ȡ�
����ͼ����(x��y)�������Ⱥ��ݶȷ�������Ӱ����ǰ��ֱ�ΪI(x��y)��I��(x��y)�ͦ�(x��y)���ȡ�(x��y)�����ǵ�������ֻ���������Ĺ��������йأ�����Ӱ����ǰ�ֲ��䣬����������ʽ(8)��(9)�У�



 (10)
(10)
�����Ƶ�����֤���˶���Ӱ�ĸ��Ų���Ӱ�챳��ͼ�������ݶȵķ�����Ӱ����ǰ�����ݶȷ����Ǻ㶨�ġ�
������Ӱ����ǰ��ROI���ݶȷ���ֱ��ͼ�ֱ�ΪH��H�䣬���е�m��bin�ֱ�ΪH(m)��H��(m)�������H(m)=H��(m)��Ϊʹ֤�����̸���࣬��Ph(x��y)=��(x+1��y)-��(x-1��y)��Pv(x��y)= ��(x��y+1)-��(x��y-1)��֤�����£�

 (11)
(11)
���У�M(x��y)��M��(x��y)�ֱ������Ӱ����ǰ������(x��y)�����ݶ�ǿ�ȡ�
�����������ڹ���ǿ�ȷ����ı�ʱ����������ص�С�����ڵ��ݶȷ���ֱ��ͼ��ȣ������й��ղ����ԣ��ݴ˿����������˶���Ӱ�����ĸ��š�
2.3 ���������ݶȷ���ֱ��ͼ����Ӱ���
�Ի�õİ����˶���Ӱ���ڵ��˶�ǰ�������������ݶȷ���ֱ��ͼ�Ծֲ��������ȱ仯���ߵ����ԣ�����������Ӱ����ǰ�������ݶ�ֱ��ͼ��ȣ�������Ӱ�����岽�����¡�
(1) ��ʽ(7)��������ȡǰ�����ص������ڵ��ݶȷ���ֱ��ͼH�Լ��ؽ�������Ӧλ�õ��ݶȷ���ֱ��ͼH�䡣
(2) ����MDPA������ֱ��ͼƥ�䣺
 (12)
(12)
ʽ�У�D(H��H��)Ϊ2��ֱ��ͼ��MDPA���롣���ŷ�Ͼ��룬MDPA�����ۺϿ���2��ֱ��ͼ��������ķֲ��������ˣ��ܹ�����ȷ�غ���2��ֱ��ͼ�����Ƴ̶ȡ����磬����2��ֱ��ͼ֮����������IJ��죬����֮�����ԽԶMDPA����Խ��MDPA�������ֵΪ��2������Ӧ��DС�ڦ�2����Ϊ��Ӱ����ȡ������
3 ������ɫ�������ݶȷ����������˶���Ӱ���
������ɫ��������������ݶȷ�����������Ӱ����㷨���и��Ե��ŵ㣬��ֱ�ӽ�2���㷨�ļ�������벢���ܵõ��ܺõļ��Ч����
���������ݶȷ���ļ�ⷽ����������������ļ�������ŶȽϸߣ������ڹ⻬����������ŶȽϵͣ���ʱ��Ҫ�����ɫ��Ϣ����һ����⡣���Ľ��������ӶȲ�������R(H)����Ϊ
 (13)
(13)
ʽ�У� ��R(H)ԽС��˵������������������ϢԽ�٣���R(H)С��һ����ֵʱ����Ϊ������Ϊ�⻬�����������ݶȷ�������Ӱ�Ŀ��ŶȲ��ߣ���ʱ��һ��������ɫ��Ϣ������Ӱ��⣬�����������Ϊ���ռ������
��R(H)ԽС��˵������������������ϢԽ�٣���R(H)С��һ����ֵʱ����Ϊ������Ϊ�⻬�����������ݶȷ�������Ӱ�Ŀ��ŶȲ��ߣ���ʱ��һ��������ɫ��Ϣ������Ӱ��⣬�����������Ϊ���ռ������
������ɫ�������ݶȷ����������˶���Ӱ�����巽�����£�
(1) ���û�ϸ�˹������ģ������ȡǰ��������ɱ������ؽ�������������������ȡ����ǰ��������ִ�С�
(2) �ֱ����ǰ�����ص������ڵ��ݶȷ���ֱ��ͼH�Լ��ؽ�������Ӧλ�õ��ݶȷ���ֱ��ͼH�䣬������R(H)��R(H��)����R(H)��R(H��)�ֱ�С����ֵ��1�ͦ�2����ִ�в���(3)������ִ�в���(4)��
(3) ������ɫ����������Ӱ��⣬�����ⲽ�����1.2�ڡ�
(4) ����MDPA������ֱ��ͼƥ�䣬С�ڦ�2�����˶���Ӱ�����������˶�����
4 ʵ���������
Ϊ��֤�����㷨�����ܣ�ѡȡ4�ηֱ�������⡢���ڡ����ٹ�·�ȳ�������Ƶ����(Campus��Laboratory��Intelligent Room��Highway I)������Ӱ��⡣���У�CampusΪ���ⳡ��������ǿ�Ƚϵͣ�ͬʱ���а�����ǿ�������źţ�Laboratory��Intelligent RoomΪ���ڳ�����Ŀ������Դ��Զ����Ӱǿ�ȷdz��ͣ� Highway IΪ���ٹ�·��������Ӱ��ǿ��������ͼ����ռ�ܴ������Ŀ���˶��Ͽ죬��ɫ����ɫ�ȳ���Ŀ������ɫ����������Ӱ��Ϊ���ơ����⣬Ϊ�������������Ա������㷨��Ӱ��������Ч�������Ȳ����˹���ע�ķ����õ�ԭʼ��Ƶͼ���е���ʵǰ������Ȼ��ǿ�������㷨�����ڸ�����
ͼ1��ʾΪ�����㷨��Campus��Ƶ�е�371֡����Ӱ����������У�ͼ1(a)��1(b)��ʾΪԭʼͼ��ͱ���ͼ��ͼ1(c)��ʾΪ�ֹ���ע������ʵǰ���������Ӱ����ǰ������Ӱ�ֱ��ð�ɫ���ɫ��ʾ��ͼ1(d)ΪSNP�㷨(1.2��)���������ͼ1(d)��֪�����ڸ��㷨�Ե�������Ϊ������ⵥλ����ˣ��ر�������ɫ��Ϣ�����ܵ��������ŵ�Ŀ���Ե����������ʽϸߣ����⣬Ŀ������ɫ����IJ��ֺ���Ӱ�������Ƶ���ɫ�����������������Ӱ��ͼ1(e)��ʾΪ���������ݶȵ���Ӱ���������ͼ1(e)�ɼ������ڸ��㷨������������������������������Ž�С�����ǣ��ڽ�Ϊƽ̹���������׳�������©�졣��ͼ1(d)��(e)���㷨���ϣ�������ռ��������ͼ1(f)��ʾ��������Ӱ���Ч����������2���㷨��
ͼ2��ʾΪ�����㷨������3����Ƶ�����Ͻ�����Ӱ����ʵ����(���ϵ�������ΪLaboratory��Intelligent room��Highway I)������֡���������ȡ�ġ�����ͼ2(a1)��(b1)��(c1)��(a2)��(b2)��(c2)��ʾ�ֱ�Ϊԭʼͼ��ͱ���ͼ��ͼ2(a3��b3��c3)��ʾΪ�ֹ���ע����Ӱ�����ǰ������ͼ2(a4��b4��c4)��ʾΪ�����㷨�ļ��������ͼ2�ɼ��������㷨�����ڡ�����Ⱦ��в�ͬ��Ӱǿ����ͼ���������ŵij����£�����ý�Ϊ����ļ��Ч����
Ϊ��һ�����������㷨����Ӱ������ܣ�������Ӱ��ȷ����ʦǺ�ǰ����ȷ����ʦ���Ϊ��������ָ��[14]��
 (14)
(14)
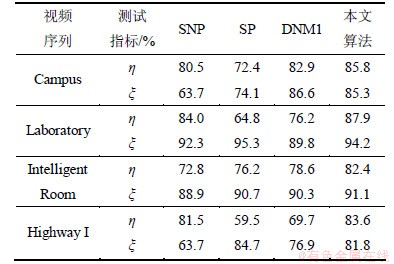
���У�TS��TF�ֱ�Ϊ��ȷ������Ӱ���ص�����ǰ�����ص�����NS��NF�ֱ��ʾ������Ϊǰ������Ӱ���ص����ͱ�����Ϊ��Ӱ��ǰ�����ص������������㷨��SNP��SP[15]��DNM1[11]���3�־�����Ӱ����㷨���жԱȣ�������1��ʾ������SNP��SP��DNM1�㷨�IJ��Խ����Դ������[15]��
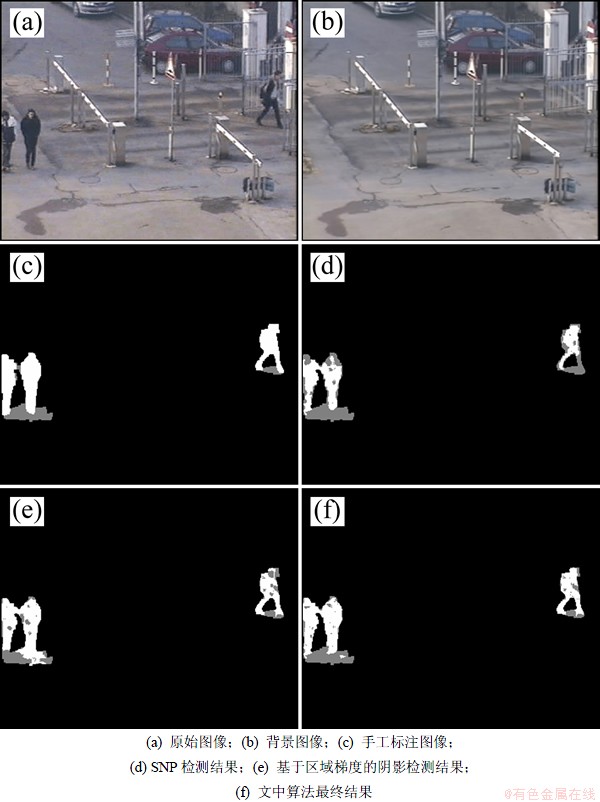
ͼ1 Campus������Ӱ�����
Fig. 1 Shadow detection results of Campus

ͼ2 �����㷨��3����Ƶ����Ӱ�����
Fig. 2 Shadow detection results of proposed algorithm for three vedios
�ӱ�1��֪�������㷨�ڲ�ͬ�����µ��ۺ�����Ҫ��������3�־����㷨�����������������ַ�����Ȼ�ڲ�ͬ����ɫ�ռ���ò�ͬ�ı��������Ӱ���������Ե�������Ϊ������ⵥλ����ˣ������������ĸ��ţ����⣬���õ�һ����ɫ����������Ӱ��⣬��Ŀ������Ӱ�������Ƶ���ɫ����ʱ���׳������У��������㷨��������ɫ������ͬʱ������������������Ӷ�������Ч�˷���������ĸ��ţ�����������Ŀ������Ӱ��ɫ�������ƶ���������С�
��1 ��ͬ�㷨���ܱȽ�
Table 1 Performance comparison of different methods
��2��ʾΪ�����㷨������4����Ƶ�����ϵ�ִ��ʱ�䡣4����Ƶ�������Campus���е�ԭʼ�ֱ���Ϊ352��288���⣬�����Ϊ320��240��Ϊ���ڱȽϣ�����ǰ��Campus���еķֱ���ת��Ϊ320��240��ʵ��Ӳ������Ϊ2.4 GHz���i3˫�˴����������뻷��ΪVS2005��
�ɱ�2��֪�������㷨�ڴ���Highway I����ʱ����ƽ��ʱ�����������Ϊ�������е�ǰ����ռ����ϴ�ƽ��Լռ����ͼ�������34%����Ҳ�ﵽ��33.1 ms/֡(Լ30.2֡/s)������ʵʱ����Ҫ��
��2 �����㷨����ʱ��
Table 2 Processing time of proposed algorithm

5 ����
(1) ֤�������ݶȷ���Ĺ��ղ����ԣ������������ݶȷ���ֱ��ͼ�����л�����������Ӱ��⣬��Ч�˷�����������ĸ��š���ʵ����Ӱ�������У�����ʹ�û�ϸ�˹ģ�͵õ�ǰ������Ȼ����ǰ�������ϸ���ͼ��ͬλ�õ��������ӳ̶�ѡ�������ɫ�����������ݶȷ���ֱ��ͼ�ķ���������Ӱ��⡣
(2) �����㷨�ܹ��ڲ�ͬ�������ȶ���Ч�ؼ����˶���Ӱ�������м��㸴�Ӷȵ͡�ʵʱ�Ժõ��ŵ㡣
�ο����ף�
[1] �ܽ�, �º�ٻ, �ſ�, ��. ���������ɫ���������˶���Ӱ��ⷽ��[J]. ������, 2011, 33(5): 628-633.
CAO Jian, CHEN Hongqian, ZHANG Kai, et al. Moving cast shadow detection based on region color and texture[J]. Robot, 2011, 33(5): 628-633.
[2] �ŷ�, ������, �Ƽͺ�. ���ɶ�������Ϣ���˶���Ӱ���[J]. ��������ҵ��ѧѧ��, 2011, 43(5): 13-19.
WEN Fan, QU Zhenshen, YAN Jihong. Moving shadow detection by integrating multiple features[J]. Journal of Harbin Institute of Technology, 2011, 43(5): 13-19.
[3] TIAN Yingli, Feris R S, LIU Haowei, et al. Robust detection of abandoned and removed objects in complex surveillance videos[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part C: Applications and Reviews, 2011, 41(5): 565-576.
[4] �ɻ���, ������, ���ٻ�, ��. ����GMM��MRF������Ӧ��Ӱ���[J]. ����������ѧѧ��: ��Ȼ��ѧ��, 2011, 39(7): 115-120.
MIN Huaqing, L Jumei, LUO Ronghua, et al. Adaptive shadow detection based on GMM and MRF[J]. Journal of South China University of Technology: Natural Science Editon, 2011, 39(7): 115-120.
Jumei, LUO Ronghua, et al. Adaptive shadow detection based on GMM and MRF[J]. Journal of South China University of Technology: Natural Science Editon, 2011, 39(7): 115-120.
[5] ������, ����, ���ٻ�, ��. һ�ֻ����˶���Ӱ��Ŀ�����㷨[J]. ģʽʶ�����˹�����, 2007, 20(2): 180-184.
GUO Lisheng, GUO Li, JIAO Ronghui, et al. An object detection algorithm based on moving shadow[J]. Pattern Recognition and Artificial Intelligent, 2007, 20(2): 180-184.
[6] Yang M T, Lo K H, Chiang C C, et al. Moving cast shadow detection by exploiting multiple cues[J]. IET Image Processing, 2008, 2(2): 95-104.
[7] Cucchiara R, Grana C, Piccardi M, et al. Improving shadow suppression in moving object detection with HSV color information[C]//Proceedings of the Intelligent Transportation Systems. NJ, USA: IEEE, 2001: 334-339.
[8] Amato A, Mozerov M G, Bagdanov A D, et al. Accurate moving cast shadow suppression based on local color constancy detection[J]. IEEE Transactions on Image Processing, 2011, 20(10): 2954-2966.
[9] Leone A, Distante C, Buccolieri F. Shadow detection for moving objects based on texture analysis[J]. Pattern Recognition, 2007, 40(4): 1222-1233.
[10] ����, ������, л����, ��. ���ھֲ���Ԫͼ����Ƶ������Ӱ��ⷽ��[J]. ϵͳ��������Ӽ���, 2007, 29(6): 974-977.
ZHANG Ling, CHENG Yimin, XIE Yuming, et al. Shadow detection method in video sequences based on LBP[J]. Systems Engineering and Electronics, 2007, 29(6): 974-977.
[11] �ؿ¼�, ��ΰ��, ����. ����GaborС������ɫģ�͵���Ӱ����㷨[J]. ����������ѧѧ��: ��Ȼ��ѧ��, 2009, 37(1): 64-68.
BAI Kejia, LIU Weiming, TANG Yi. Shadow detection algorithm based on Gabor wavelet and color model[J]. Journal of South China University of Technology: Natural Science Edition, 2009, 37(1): 64-68.
[12] ����, �����, ��Ⱥ, ��. �ں���ɫ���ݶ��������˶���Ӱ��������[J]. ��������������ͼ��ѧѧ��, 2007, 19(10): 1279-1285.
LIU Hong, LI Jintao, LIU Qun, et al. Moving cast shadow elimination based on color and gradient features[J]. Journal of Computer-aided Design & Computer Graphics, 2007, 19(10): 1279-1285.
[13] Horprasert T, Harwood D, Davis L S. A statistical approach for real-time robust background subtraction and shadow detection[C]//Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra: IEEE, 1999: 255-261.
[14] Sanin A, Sanderson C, Lovell B C. Shadow detection: a survey and comparative evaluation of recent methods[J]. Pattern Recognition, 2012, 45(4): 1684-1695.
[15] Prati A, Mikic I, Trivedi M, et al. Detecting shadows: Algorithms and evaluation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(7): 918-923.
(�༭ ������)
�ո����ڣ�2012-09-14�������ڣ�2012-11-06
������Ŀ��������Ȼ��ѧ����������Ŀ(61371125)
ͨ�����ߣ����Ļ�(1987-)���У����������ˣ���ʿ�о�����������Ƶ����������Ӿ��о����绰��13720108602��E-mail��xiewenhua0422@126.com
ժҪ�����������ɫ���������ȵ�һ��������Ч����˶���Ӱ�����⣬���һ�ֽ����ɫ������������Ϣ������Ӱ�����㷨�����ںϲ����ϣ�������Ƶͼ��ͬ������������ӳ̶ȣ�ѡ��ʹ����ɫ��Ϣ���������ݶȷ���ֱ��ͼ���˶���Ӱ���м�⡣ͨ��������֤�������ݶȷ���Ĺ��ղ����ԣ����һ�����ø��������л�����������Ӱ����·���������Ч�˷���ͳ�㷨������Ϊ��С��ⵥλ�����ܵ��������ŵIJ��㡣ʵ�������������㷨�ڲ�ͬ�����±��ֳ��Ϻõ���Ӱ������ܣ�ͬʱ���м��㸴�Ӷȵ͡�ʵʱ�Ժõ��ŵ㡣
[1] �ܽ�, �º�ٻ, �ſ�, ��. ���������ɫ���������˶���Ӱ��ⷽ��[J]. ������, 2011, 33(5): 628-633.
[2] �ŷ�, ������, �Ƽͺ�. ���ɶ�������Ϣ���˶���Ӱ���[J]. ��������ҵ��ѧѧ��, 2011, 43(5): 13-19.
[5] ������, ����, ���ٻ�, ��. һ�ֻ����˶���Ӱ��Ŀ�����㷨[J]. ģʽʶ�����˹�����, 2007, 20(2): 180-184.
[10] ����, ������, л����, ��. ���ھֲ���Ԫͼ����Ƶ������Ӱ��ⷽ��[J]. ϵͳ��������Ӽ���, 2007, 29(6): 974-977.
