
�ھ������̶߳�λ����
лϰ�������廪���� ��
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ժ Ҫ��Ϊʵ���ھ������ά�ռ䶨λ���ڰ�װ����װ�ø��ؽڽǶȴ������Ļ����ϣ��ְ�װƽ̨��ת�Ƕȼ��װ�ú�ƽ̨��Ǵ����������ڶ����ϰ�װ������������ڼ����漤�ⷢ���������ˮƽ��������ڽ�������λ�ĸ߶ȡ������ھ�����˶�ѧģ�ͣ��Ƶ���������ڴ�ص�����任���������ά�ռ�ij��嶨λ�����õ����ö��ij���̶߳�λ��ʽ��Ȼ���Ƶ��ö�λ����λ���²�������ϵ����ڴ�ص�����任�������ھ���ȶ�λ��ʽ��ʵ�����ھ���ھ�켣����ά�ռ䶨λ��Ϊʵ���ھ������ά�ռ�켣��ȷ�������ھ���ȿ��ƴ����˻�����
�ؼ��ʣ�
��ͼ����ţ�TP24 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2007)05-0928-04
Laser height-finding of robotic excavator
XIE Xi-hua, HE Qing-hua, ZHOU Liang
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: In order to get the carriage position of excavator in three-dimensional space, in addition to of joints angle sensors��the obliquity sensor and the swing angle sensor of the platform were mounted, and a laser receiver was mounted on the boom to measure the relative height of the boom to the laser bean from the ground sender. The carriage positioning model of robotic excavator and the coordinate transformation matrix of carriage positioning were formulated, and the height of the body relative to the ground was gotten. The carriage positioning was finished, the coordinate transformation matrix of the bucket relative to the ground and the digging depth were obtained and it is easy to make the three-dimensional trace control of the hydraulic excavator bucket easy.
Key words: excavator; robot; laser height; positioning
Ŀǰ������һ�廯���Զ����ѳ�Ϊ���̻�е�ķ�չ����֮һ�������Ͷ�ǿ�ȴ��Ͷ��������Լ���ȫ�ò������ϵĹ��̽��裬������Ҫ�û������������˹���ҵ[1-2]��Һѹ�ھ����Ϊ��������͡��ṹ��ӡ���;��㷺�Ĺ��̻�е֮һ�����Զ������о�(�����Ǿֲ��Զ���)����Ϊ������ע�Ľ��㡣���⣬ʵ���ھ��Զ���Ҳ����������������ھ������Ч�ʵ���Ҫ��Ŀǰ��һЩ�о��������ܿ��ơ�ң�ء�����滮���Զ��ھ�װ�صȷ���������о�[3-14]�����ⷽ����о����������ڶ��ھ���Ĺ���װ�ý��п����ϣ������漰��ת�����߿��ƣ��Բ�����λ�˼��켣����Ҳ���ֻ�Ǿ����ڲ���������ھ�����۸�����λ�˺켣[15-17]�����ϴ�ѧ�����ɽ�����ܹɷ�����˾�з��Ļ���һ�廯�ھ������CANBus�����������м���̶߳�λ��ͼ�ε�����״̬��⡢����ˮ�º�ҹ��Ȳ��ɼ����������ä���������ܿ��ơ��Զ��ھ�(ˮƽ�ھ��¶��ھ�)���ھ���ȿ��ơ��������ȹ��ܣ����ھ�����Զ����о�����ʵ�û���������ͼ�ε��������Զ��ھ����ȿ��ƣ�����������һ��ȷ���IJο�����ϵ�������г��嶨λ��Ȼ����ʵ�ֶԲ����˶��ľ�ȷ��������ơ����о����õĹ���װ�ã��ڶ��ۡ����ˡ������ϰ�װ�нǶȴ���������ת������װ�л�ת�Ƕȴ���������תƽ̨�ϰ�װ��˫����Ǵ��������䳵�嶨λ����Ϊ�����漤�ⷢ��������ˮƽ���⣬�����ֲ��ݹ���װ��ʹ���淢��ļ����ܱ������ϵļ������������⣬Ȼ��ɼ����������IJ��������������������Ե������������任��ϵ���õ�������Ե�������ĸ߶�����ǡ�
1 ����ϵ�Ľ�����ת�������Ƶ�
1.1 ��������ϵ
�Գ���������ĵ�Ϊԭ�㣬�س���������ǰΪX�ᣬ�س���ƽ������ΪY�ᣬ����ΪZ�ᣬ��ͼ1������ϵOvXvYvZv��
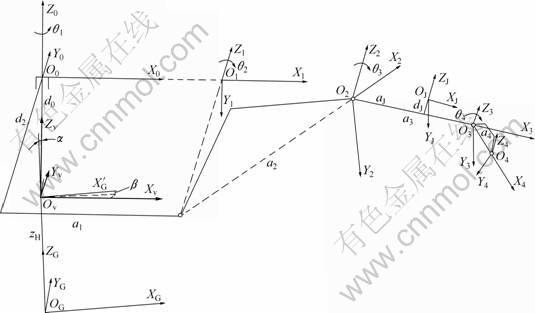
ͼ1 ��������ϵʾ��ͼ
Fig.1 Sketch map of coordinates of the carriage
1.2 �ؽ�����ϵ
���ؽ�����ϵ��Denavit-Hartenberg����[18]��������ͼ1��ʾ���ֱ�ΪO0X0Y0Z0��O1X1Y1Z1��O2X2Y2Z2��O3X3Y3Z3��O4X4Y4Z4��
����(�˼�3)�ϰ�װ�м�������������������������ϵΪOJXJYJZJ��
����Denavit-Hartenberg��������n���ؽ�����ϵ����ڵ�n-1���ؽ�����ϵ������任����Ϊ��
 �� (1)
�� (1)
ʽ�У�![]() Ϊ���ؽ���Ĺ����߳��ȣ������˳��ȣ�
Ϊ���ؽ���Ĺ����߳��ȣ������˳��ȣ�![]() Ϊ����֮��ľ��룻
Ϊ����֮��ľ��룻![]() Ϊ����Ťת�ǣ�
Ϊ����Ťת�ǣ�![]() Ϊ���˼нǣ�n=1��2��3��4�����˼��IJ������1��ʾ��
Ϊ���˼нǣ�n=1��2��3��4�����˼��IJ������1��ʾ��
��1 ���˼�������
Table 1 Parameters of links
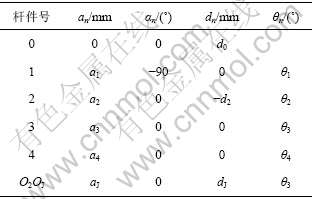
���ؽڼ�ı任����ֱ�Ϊ��
 ��
�� ��
��
 ��
��
 ��
��
 ��
��
 ��
��
ʽ�У�TJΪ����ϵOJXJYJZJ���������ϵO2X2Y2Z2������任����![]() ��
��![]() ��
��![]() ��
��
2 ���嶨λ
�賵��ǰ��Ϊb�����Ҳ����Ϊa����������ڴ�ص������ΪzH����������ϵ����ڵ�������ϵ�ı任����Ϊ��
![]()
 �� (2)
�� (2)
���г��嶨λʱ��ʹ��תƽ̨������λ����![]() ����ʱ����װ��ƽ̨�ϵ���Ǵ��������Լ�ƽ̨��������Ǻ�ǰ�����ǣ�ƽ̨��������Ǽ�������̵��������a��ƽ̨��ǰ�����Ǽ�������̵�ǰ������b(��ͼ1��ʾ)��ƽ̨����ϵ��Դ������ϵ�ı任����Ϊ��
����ʱ����װ��ƽ̨�ϵ���Ǵ��������Լ�ƽ̨��������Ǻ�ǰ�����ǣ�ƽ̨��������Ǽ�������̵��������a��ƽ̨��ǰ�����Ǽ�������̵�ǰ������b(��ͼ1��ʾ)��ƽ̨����ϵ��Դ������ϵ�ı任����Ϊ��
![]()
 (3)
(3)
����A=![]() ��B=
��B=![]() ��
��
���м���̶߳�λʱ�����漤�ⷢ��������ˮƽ���⣬��������װ��ʹ���淢���ˮƽ�����ܱ������ϵļ������������⣬��֪��������ڴ�ص������Ϊhj���輤����������ļ�����Ը߶�ΪxJ=h������յ���Դ������ϵ������Ϊ��
 �� (4)
�� (4)
�ɴ˵ã�
![]()
![]() ��
��
���У�a1, a2, aJ , d0, d2, dJΪ��֪���������ǣ����õ���������ڴ�ص������Ϊ��
![]()
����������ɳ���ĸ̶߳�λ���ٽ�a��b��zH����ʽ(2)���õ����嶨λ�任����M��
3 �����ھ���ȶ�λ
�Գ�����ж�λ�õ��任����M���������λ�ˣ��ɼ����ۡ����ˡ������ϵĽǶȴ�����ֵ(q2~q4)����ת�����Ļ�ת�Ƕȴ�����ֵ(q1)�����ɵõ���������ϵ��Դ�ص�����任����
![]()
 �� (6)
�� (6)
�����ݼ���Դ������ϵ������Ϊ(px, py, pz)��
![]() �� (7)
�� (7)
����Dz����ݼ����Դ������ϵ�ĸ߶ȣ���ֵ![]() ��Ϊ�ھ���ȡ�
��Ϊ�ھ���ȡ�
4 �� ��
a. �ڹ���װ�ø��˼���װ�Ƕȴ�������ͨ����װƽ̨��Ǵ���������ת�Ƕȼ��װ���Լ��ڶ����ϰ�װ����߶ȼ���ǣ�ʵ���˳�����ά�ռ䶨λ���ܡ�
b. ����Denavit-Hartenberg�����������ھ�����ؽ��˶�ѧ���꣬���Ƶ�������������Ե������������任���Ӷ���ɳ��嶨λ��Ȼ���Ƶ����ھ���ҵ�еij���̶߳�λ��ʽ��
c. ��ó��嶨λ����任������Ƶ��˲�������ϵ��Դ�ص�����任����ʵ���˰�����ת���ڵ��ھ������װ����ά�ռ��ھ�켣��λ�����������ھ���ȶ�λ��ʽ��
d. ��ά�ռ�ij��嶨λ������ʵ��ˮƽ�桢б�����ھ��Լ���ά�ռ�켣�ľ�ȷ���ơ�
�ο����ף�
[1] �ź���, ���廪, ��Ƿ��. ң���ھ�����˹켣���ٵĵ�Һ��������ϵͳ[J]. Һѹ������, 2004(7): 11-13.
ZHANG Hai-tao, HE Qing-hua, CHEN Qian-gen. The electrohydraulic proportional control system for robotic excavator[J]. Chinese Hydraulics & Pneumatics, 2004(7): 11-13.
[2] Muramatsu T, Kenji C. A concept of control system for construction robot[C]//Proceedings IEEE/RSJ International Workshop on Intelligent Robots and Systems. Tsukuba, 1989.
[3] Ha Q, Santos M, Nguyen Q, et al. Robotic excavation in construction automation[J]. IEEE Robotics & Automation Magazine, 2002(3): 20-28.
[4] Seward D, Bradley D, Mann J, et al. Controlling an intelligent excavator for autonomous digging in difficult ground[C]// Proceedings Ninth International Symposium on Automation and Robotics in Construction. Tokyo, 1992.
[5] Singh S, Simmons R. Task planning for robotic excavation[C]//��Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems. Raleigh, 1992.
[6] Bradley D A, Seward D W. The development, control and operation of an autonomous robotic excavator[J]. Journal of Intelligent and Robotic Systems, 1998, 21: 73-75.
[7] Stentz A, Bares J, Singh S, et al. A robotic excavator for autonomous truck loading[C]//Proceedings International Conference on Intelligent Robots and Systems. Victoria, 1998.
[8] Cannon H. Extended earthmoving with an autonomous excavator[D]. Pittsburgh: Carnegie Mellon University, 1999.
[9] Ha Q P, Nguyen Q H, Rye D C, et al. Impedance control of a hydraulically-actuated robotic excavator[J]. Automat Construction, 2000, 9(5): 421-435.
[10] Nguyen H Q. Robust low level control of robotic excavation[D]. Sydney: Australian Centre for Field Robotics, University of Sydney, 2000.
[11] Terwelp C R. Remote control of hydraulic equipment for unexploded ordnance remediation[D]. Blacksburg: Department of Mechanical, Science and Engineering, Faculty of the Virginia Polytechnic Institute and State University, 2003.
[12] ���廪, �Ŵ���, �� ��, ��. Һѹ�ھ������װ��ģ�ͼ����Ƶ������о�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(3): 542-546.
HE Qing-hua, ZHANG Da-qing, HAO Peng, et al. Model and experimental research on control of hydraulic excavator��s manipulator[J]. Journal of Central South University: Science and Technology, 2006, 37(3): 542-546.
[13] HE Qing-hua, ZHANG Da-qing, HAO Peng, et al. Modeling and control of hydraulic excavator��s arm[J]. Journal of Central South University of Technology, 2006, 13(4): 422-427.
[14] ������, ���ʹ�, ��ռ��. Һѹ�ھ������װ���˶�ѧ�������켣�滮[J]. ��ɽ��е, 1998(2): 23-25.
LI Lan-sheng, BIAN Ren-guo, ZOU Zhan-jiang. Kinematics analysis and trace scheme of the working device in a hydraulic excavator[J]. Mining & Processing Equipment, 1998(2): 23-25.
[15] �Ŵ���, ���廪, �� ��, ��. Һѹ�ھ�������Ĺ켣���ٿ���[J]. ���ִ�ѧѧ��: ��ѧ��, 2005, 35(5): 490-494.
ZHANG Da-qing, HE Qing-hua, HAO Peng, et al. Trajectory tracking control of hydraulic excavator bucket[J]. Journal of Jilin University: Engineering and Technology Edition, 2005, 35(5): 490-494.
[16] ��Ƿ��, ������, �� ��. Һѹ�ھ������װ����̬���[J]. �����Զ���, 2005(5): 14-16.
CHEN Qian-gen, WU Xiao-jian, ZHAO Juan. The gesture measuring of working unit of hydraulic excavator[J]. Industry and Mine Automation, 2005(5): 14-16.
[17] �ź���, ���廪, ���º�, ��. ������Һѹ�ھ���˶�ϵͳ�Ľ�ģ�����[J]. ������, 2005, 27(2): 113-117.
ZHANG Hai-tao, HE Qing-hua, ZHANG Xin-hai, et al. Modeling and control of the motion system of a hydraulic robotic excavator[J]. Robot, 2005, 27(2): 113-117.
[18] Paul R P. Robot manipulators: Mathematics, programming, and control[M]. Massachusetts: MIT Press, 1981.
�ո����ڣ�2006-12-10�������ڣ�2007-01-25
������Ŀ�����ҡ�863���ƻ�������Ŀ(2003AA430200)
����飺лϰ��(1969-)���У�������Դ�ˣ���ʿ�о�������ʦ�����»����˿��Ƽ��������������ϵͳ����ҵ��Ϣ�����о�
ͨ�����ߣ�лϰ�����У���ʿ�о�������ʦ���绰��0731-4020687��E-mail: xxh_zh@mail.csu.edu.cn
