
��Ȼ�������ַ��ͽ�ͨ��־�ļ���㷨
������1��������1����Тƽ2
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
2. �й�������ѧ�о�Ժ ��ѧ����ѧ������ѧ�о�����������100013)
ժ Ҫ��
�к��ٹ�·�������ַ��ͽ�ͨ��־���·��������ȣ�������ͼ���зָ����ɫ��ī��ɫ��������̬�˲�����״���ͼ�жϽ�ͨ��־�ĺ�ѡ������Σ�����ѡ����IJ�ɫͼ��ҶȻ�����Otsu�㷨�����ѡ����Ҷȷֲ�ֱ��ͼ����ֵ����������зָ�õ������ַ��Ķ�ֵͼ��Ȼ����ѡ����Ķ�ֵͼ����ֱ������ͶӰ����3����������㷨���������ϣ��������ߵ����ʣ��ҵ���������еľֲ���Сֵ�㣬�ָ�������ַ����������������������ˮƽ�����Ͻ���ͶӰ��������ϣ����Ҿֲ���Сֵ�㲢�ָ�������ַ������ٽ�����̬���ˣ��ָ��λ��ͨ��־�е��ַ���ʵ�������������㷨���ַ���ȫ�ʸ���84%��ȷ�ʳ���92%��
�ؼ��ʣ�
��ͨ��־������ַ���λ��������������ͼ��
��ͼ����ţ�TP391.2 ���ױ�־�룺A ���±�ţ�1672-7207(2013)05-1861-08
Detection algorithm of traffic sign with character in nature scenes
GU Mingqin1, CAI Zixing1, REN Xiaoping2
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
(2. Division of Mechanics and Acoustics, National Institute of Metrology, Beijing 100013, China)
Abstract: A novel detection algorithm for traffic signs with character in the urban and highway scenes was proposed. Firstly, blue and green regions were segmented from the input image, and candidates of traffic sign were obtained by morphology filter and signature of shape. Then, color image of candidate was coverted to gray image, and binary images contain characters were obtained by segmentation with threshold of gray distribution histogram computed by Otsu algorithm. Thirdly, the binary image of candidate was projected to vertical orientation and fitted a curve with cubic spline interpolation. The local minimum points were found using the nature of the curve, and the bar region with character rows were segmented from binary image. Finally, bar region was projected to horizontal orientation and fitted a curve, the local minimum points were found to segment the single character regions. The characters in traffic sign were segmented and localized by morphology filter. The results indicate that recall rate of character exceeds 84%, and precision rate is more than 92%.
Key words: traffic sign detection; character localization; curve fitting; signature
�����������ܳ����о����ܵ����ӣ���·������Ϣ�ĸ�֪Ҫ��Ҳ�������ӡ��ַ��͵Ľ�ͨ��־�ṩ�˵�·�ĵ�����Ϣ��·����ע������ȸ���������ʻ����Ϣ���������о����ַ��ͽ�ͨ��־���Զ����������漰���Զ�����·�����еĽ�ͨ��־��Ҫ��3�ֳ����ķ�ʽ��(1) �ڻҶ�ͼ���ϼ�⽻ͨ��־�ı�Ե��Overett��[1]�÷����ݶ�ֱ��ͼ��������˺ͱ� ־����Sobel��Canny�����������Ҷ�ͼ���еı�Ե�������ҽ�ͨ��־�ĺ�ѡ����[2-3]��Belaroussi��[4]����ͼ���ݶȷ���ļ���ģ������������ν�ͨ��־�����ǣ���Щ�������ڹ�ע��״�������������dz����С�(2) �þ��������������������ȡ����Ȥ������HaarС���������������ܷ�������Adaboost����⽻ͨ��־[5]��Ȼ�������ַ�ʽ������������������Ruta��[6]��ͼ���ʾ�ͷֱ���ǿ������ѡ����ʶ��ͨ��־�����ǣ��÷�������������������������������������ӣ����ķѵ�ѵ��ʱ���������ӡ�(3) �Խ�ͨ��־����ɫ�ͼ�����״����⽻ͨ��־�����õ���ɫ�ռ�ΪRGB[7]��HSI[8]��YUV[9]�ȡ��÷����ܹ��Ϻõؼ�⽻ͨ��־�����ǣ����ѡ��1�����ʵķָ���ֵ��dz����ѡ�Maldonado-bascon��[10]�ø���Ȥ����ı�Ե���߽������Ϊ��״ʶ����������ֱ��⽻ͨ��־��Gil��[11]�ÿ��ٸ���Ҷ�任�ľ���ֵ��Ϊ��״ʶ������������ת�����š��ڵ���ͶӰ�α���������нϺõ�³���ԣ������㸴�Ӷȸߡ�Ȼ��������������Ҫ����ڲ�ͼ�μĽ�ͨ��־�����Ժ����ַ��Ľ�ͨ��־����о�����١�Chen��[12]�ö�߶ȵ�LOG��Ե����ӡ�����Ӧ��������ɫ��������������㷨��������֡�����ǿ��[13]����û���ͬ�Ĵ��ڵķ�������λ��·��ͨ��־�е����֡������㷨����ٶȽ�������Ӧ�õ����ܳ���ϵͳ�С�Hanif��[14]��AdaBoost�㷨���Ҷ�ͼ���е��ı����������һ�ּ����к��ٹ�·�������ַ��ͽ�ͨ��־���·��������ȣ�������ͼ���зָ����ɫ��ī��ɫ��������̬�˲�����״���ͼ���жϽ�ͨ��־�ĺ�ѡ������Σ���Otsu�㷨�����ѡ����Ҷȷֲ�ֱ��ͼ����ֵ�����ָ�������ַ��Ķ�ֵͼ��Ȼ����3����������㷨��ϳ���ѡ����ֱ������ͶӰ��ͶӰ���ߣ��������ߵ����ʣ��ҵ���������еľֲ���Сֵ�㣬�Էָ�������ַ����������������������ˮƽ������ͶӰ��������ϣ����Ҿֲ���Сֵ�����ָ�������ַ�����������̬���ˣ���λ����ͨ��־�е��ַ���
1 ��ͨ��־������
ͼ1��ʾΪ���ٹ�·�ͳ��л����н�Ϊ�����Ľ�ͨ��־��������ͼ1�ɼ��������ַ��Ľ�ͨ��־�ڳ�����һ�������װ��֣������ٹ�·��ī��ɫ�װ��ֵľ��α�ʶ�ƣ�ָʾ�˳�����ʻ��ǰ���ĵ�·���ơ�������Ϣ��·����Ϣ������һЩָʾ����Ϣ�������ڳ�����ʻ�ĵ�·�ҷ���Ϊ�ˣ����������ͼ2��ʾ����������к��ٹ�·������һЩ�������Һ��зḻ��Ϣ���ַ��Խ�ͨ��־�����ָ����е��ַ������Ա�Ϊ�����ַ�ʶ���ṩ������

ͼ1 ���к��ٹ�·�����е��ַ��ͽ�ͨ��־����
Fig.1 Examples of traffic signs in urban and highway environment

ͼ2 �ַ��ͽ�ͨ��־�ļ���㷨���
Fig.2 Detection framework of traffic sign with character
1.1 ��ɫ�ָ�
��Բɼ�������Ƶͼ���������й�ʽ�ָ����ɫ��ī��ɫΪ�Ľ�ͨ��־����Ȥ������RGB�ռ�ͼ���ÿ������ֵΪ��

����������±任��
 (1)
(1)
���У� ΪRGBͨ������ֵ֮�ͣ�Ϊ���ص����꣺
ΪRGBͨ������ֵ֮�ͣ�Ϊ���ص����꣺



�Ա任���ͼ��ֱ������ֵ�ָ�ɵð�����ͨ��־����Ȥ����Ķ�ֵͼ��
 (2)
(2)
���� ����Խ�ͨ��־�ĵ�ɫ��ɫ��ī��ɫ���ֱ�ѡ����ֵΪ0.15��0.15��ͼ����зָ�õ���ɫ��ī��ɫ��2����ֵͼ�ö�ֵͼ���а�����ͨ��־�ĸ���Ȥ�����ýṹԪ����ͬ�ĸ�ʴ��������̬ѧ�˲������������ʣ����ָ�ͼ������
����Խ�ͨ��־�ĵ�ɫ��ɫ��ī��ɫ���ֱ�ѡ����ֵΪ0.15��0.15��ͼ����зָ�õ���ɫ��ī��ɫ��2����ֵͼ�ö�ֵͼ���а�����ͨ��־�ĸ���Ȥ�����ýṹԪ����ͬ�ĸ�ʴ��������̬ѧ�˲������������ʣ����ָ�ͼ������
1.2 ��״������ȡ���ж�
����̬ѧ�˲������ɫ��ī��ɫͨ���Ķ�ֵͼ�����ͼ���еĿն�������������ͨ����Ϊ ��j=1, ��, NR������
��j=1, ��, NR������ ��
�� ��
�� �ֱ�������������Ⱥ߶ȣ����߱�
�ֱ�������������Ⱥ߶ȣ����߱� ��ռ�ձ�
��ռ�ձ�
 �����������㣺
�����������㣺
 (3)
(3)
�����˫���Բ�ֵ�㷨��������һ��Ϊ50��50�Ķ�ֵͼ������ ��
�� ��
�� ��
�� ��
�� Ϊ��Ӧ����ֵ�������в������б������Ƿ���Ϻ����ַ��Ľ�ͨ��־��״������
Ϊ��Ӧ����ֵ�������в������б������Ƿ���Ϻ����ַ��Ľ�ͨ��־��״������
(1)������ȡ��״��˳ʱ��߽磬��Ϊ ��i=1, ��, N��N����״�ı߽������
��i=1, ��, N��N����״�ı߽������
(2) ��ȡ�����ģ�

(3) ���߽�����ת����������Ϊԭ�������ϵ�У��õ��±߽����У�

(4) ���±߽�� �����ĵİ뾶��Ϊ��������ˮƽ��нǵĺ������õ�1���뾶��Ƕȱ仯����ֵ����
�����ĵİ뾶��Ϊ��������ˮƽ��нǵĺ������õ�1���뾶��Ƕȱ仯����ֵ���� ��
�� ������һ��Ϊ
������һ��Ϊ ��
��
(5) ����3��������ֵ�㷨 ��һ��Ϊ����Ϊ360������������
��һ��Ϊ����Ϊ360������������ ��
��
(6) ��ȡ����Ȥ������״���� ���������������
��������������� ֮�����СEuclidean���룺
֮�����СEuclidean���룺
 (4)
(4)
���У�NSΪ�����������������ĸ�����
�� ��Td���������ǽ�ͨ��־�ĺ�ѡ�����Ӻ�ѡ�����б�������
��Td���������ǽ�ͨ��־�ĺ�ѡ�����Ӻ�ѡ�����б�������
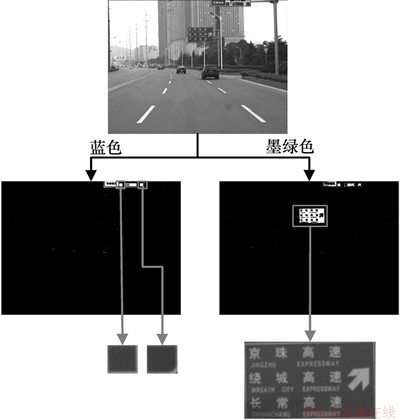
ͼ3 ��ͨ��־����Ȥ������ȡ����
Fig.3 Extracting process of traffic sign ROIs
2 ��ͨ��־�е��ַ����
�����ַ��Ľ�ͨ��־�У��ַ�����ɫһ��Ϊ��Ŀ�İ�ɫ���뱳������ϴ���ˣ������ûҶ�ͼ���ϵ���ֵ�ָ�����뱳����ȫ�ֿ���
2.1 ��ͨ��־����Ȥ������ֵ�ָ�
���ȣ�����ѡ�����IJ�ɫͼ���ԭͼ�м��г������ҶȻ�Ϊ ��ͳ�Ƴ���ͼ5(a)�еĺ�ѡ�����ɫ��ĻҶȷֲ�ֱ��ͼ����ͼ4��ʾ��
��ͳ�Ƴ���ͼ5(a)�еĺ�ѡ�����ɫ��ĻҶȷֲ�ֱ��ͼ����ͼ4��ʾ��
��Otsu������ȡ�Ҷȷֲ�ֱ��ͼ�е���ѷָ���ֵVLevel����ͼ4���ú��߱�ʾ���Էָ����ѡ�������ַ��������ѡ������ڲ�����������(xin, yin)����ͼ�� �Ǵ�С����ͬ�Ķ�ֵͼ��
�Ǵ�С����ͬ�Ķ�ֵͼ��
 (5)
(5)
�þ�����ͬ�ṹԪ�صĸ�ʴ�����Ͳ�����������ֵͼ�������ͽ�С��������

ͼ4 ��ѡ����ĻҶȷֲ�ֱ��ͼ���ָ���ֵ
Fig.4 Gray distribution histogram of candidate region
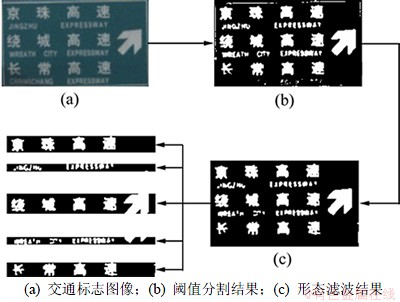
ͼ5 ��ͨ��־�ڲ��ַ�����ָ����
Fig.5 Segmentation processes of inner region of character in traffic sign
2.2 �ַ�����붨λ
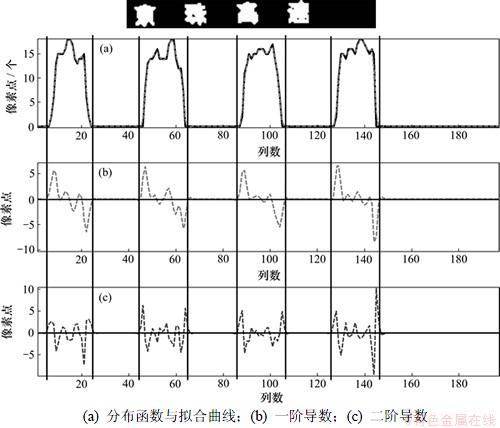
���ȣ����ָ��ĸ���Ȥ�����ֵͼ����ֱ�����Ͻ���ͶӰ���õ���ÿ���Ϸ���Ԫ�ظ�����ɵ�����xV,i, i=1, ��, NV�����У�NV�Ǹ���Ȥ�����������Ȼ����3������������Ϸ���[15]����ϳ�һ�����ĺ��� ������һ�Ͷ���������������һ�Ͷ������ֱ��Ϊ
������һ�Ͷ���������������һ�Ͷ������ֱ��Ϊ ��
�� �����ݺ����ֲ���ֵ�ж϶�����
�����ݺ����ֲ���ֵ�ж϶�����
����1[16](�ڶ��ֳ������)�躯���ڵ�x 0�����ж�������=0�� ����ô��
����ô��
(1) �� ��0ʱ��������x 0��ȡ����ֵ��
��0ʱ��������x 0��ȡ����ֵ��
(2) ����0ʱ��������x 0��ȡ��Сֵ��
�� =0���ҵ�1����Ϻ����ȶ���ֵxj, j=1, ��, L��LΪһ����Ϊ��ĵ������������
=0���ҵ�1����Ϻ����ȶ���ֵxj, j=1, ��, L��LΪһ����Ϊ��ĵ������������ ��ֵ������0.3������Ϊ
��ֵ������0.3������Ϊ ����Ϻ�����һ����Сֵ����xj��Ϊ��ͨ��־��ѡ�������еķָ�㣬�Ӷ���ѡ����Ϊ�����ַ���������������ַ�������ж�λ����ͼ5��ʾ��ͼ6��ʾΪ��ѡ�����ֵͼ��ͼ5(c)�д�ֱ����ͶӰ����Ϻ�����������ͼ�Σ���ɫ��ֱֱ�߱����˷ָ���ڸ���ͼ���ϵĶ�Ӧ��ϵ��
����Ϻ�����һ����Сֵ����xj��Ϊ��ͨ��־��ѡ�������еķָ�㣬�Ӷ���ѡ����Ϊ�����ַ���������������ַ�������ж�λ����ͼ5��ʾ��ͼ6��ʾΪ��ѡ�����ֵͼ��ͼ5(c)�д�ֱ����ͶӰ����Ϻ�����������ͼ�Σ���ɫ��ֱֱ�߱����˷ָ���ڸ���ͼ���ϵĶ�Ӧ��ϵ��
��ÿ�������ַ�������������ˮƽ������ͶӰ��������Ϊ (k=1, ��, NH)������NH���ַ��������������������3������������Ϸ�����ϳ������ɵ��ĺ���������ȡ��һ�����Ͷ���������=0���ҵ���Ϻ������ȶ���
(k=1, ��, NH)������NH���ַ��������������������3������������Ϸ�����ϳ������ɵ��ĺ���������ȡ��һ�����Ͷ���������=0���ҵ���Ϻ������ȶ��� (p=1, ��, Lh��LhΪһ����Ϊ��ĵ����)��������
(p=1, ��, Lh��LhΪһ����Ϊ��ĵ����)�������� �����ݺ����ֲ���ֵ�ж϶�������
�����ݺ����ֲ���ֵ�ж϶�������
 (6)
(6)
����Ϊ ����Ϻ����ļ�Сֵ������������״�����1���ָ�㣬���ֳ������ַ�������ͼ7��ʾΪ1�������ַ�����״�����Ӧ����Ϻ������䵼������Ӧ�ķָ���ô�ֱ�ĺ�ɫֱ�߱�ʾ��
����Ϻ����ļ�Сֵ������������״�����1���ָ�㣬���ֳ������ַ�������ͼ7��ʾΪ1�������ַ�����״�����Ӧ����Ϻ������䵼������Ӧ�ķָ���ô�ֱ�ĺ�ɫֱ�߱�ʾ��
���ֵĿ��߱�һ��Ϊ1����бʱ��ﵽ1.2������ͨ���ַ��������̬��һ�����˵õ����ֺ�ѡ������ (i=1, ��, NC)Ϊ�ָ����ַ�����
(i=1, ��, NC)Ϊ�ָ����ַ����� ��
�� ��
�� �ֱ�Ϊ�����Ŀ����ߺ����������Ŀ��߱Ⱥ�ռ�ձȷֱ���Ϊ
�ֱ�Ϊ�����Ŀ����ߺ����������Ŀ��߱Ⱥ�ռ�ձȷֱ���Ϊ ��
�� ��
��
���������㣺
 (7)
(7)
��������1���ַ��ĺ�ѡ���� ��
�� ��
�� ��
�� ��
�� �Ƿָ���ֵ������ʵ�����������ȡ50��1500��0.5��1.5��0.5��
�Ƿָ���ֵ������ʵ�����������ȡ50��1500��0.5��1.5��0.5��
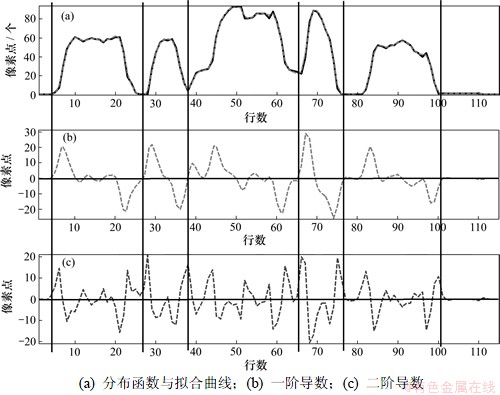
ͼ6 ��ֵͼ��ֱ����ͶӰ�����ָ��
Fig.6 Projective curves of binary image in vertical direction and segmentation points
ͼ7 �ַ���ͼ��ˮƽ�����ͶӰ�����ָ��
Fig.7 Projective curves of character image in horizontal direction and segmentation points
3 ʵ�����
3.1 ʵ������
Ϊ���Ա��㷨����ַ��ͽ�ͨ��־�����ܣ����䱸��ҵ��������ܳ��ں���ʡ��ɳ����������ɳ����̶�ĸ��ٹ�·�ϲɼ�51����Ƶ�������ڳ�ɳ����18�Σ����ٹ�·33�Ρ�ÿ����Ƶ�IJɼ�֡��Ϊ20֡/s���ֱ���Ϊ1 392��1 040���أ�ʱ��Ϊ5 s������Щ��Ƶ���ݷ�Ϊ4�����Լ����ֱ��Ӧ��ͬ�Ļ������������������1��ʾ��
��1 ��ͨ��־����㷨���Լ�
Table 1 Test sets of traffic sign detection algorithm

3.2 �ַ��ͽ�ͨ��־����㷨���ܷ�����ʵ����
Ϊ���������㷨�ڼ���ַ��ͽ�ͨ��־�����ܣ������������
(1) ��ȷ�������(ATD)������ȷ���ĺ����ַ��Ľ�ͨ��־����
(2) ����������(AFD)�������ķǺ����ַ���ͨ��־����
(3) ©������(AMD)����û�м������ַ��Ľ�ͨ��־����
(4) �������ַ�����(AAT)����ͼ�������к����ַ��Ľ�ͨ��־����
(5) ��ȷ����ַ�(CTC)������ȷ�����ַ���
(6) �������ַ�(CFC)�������ķ��ַ���
(7) ©���ַ�(CMC)����û�м����ַ���
(8) �������ַ�����(CAC)����ͼ���н�ͨ��־���е��ַ���
�Խ�ͨ��־����ļ�����ܲ������������¡�
(1) ��ȫ�ʣ� ��
��
(2) ȷ�ʣ� ��
��
(3) ©���ʣ� ��
��
���ַ�����ļ�����ܲ������������¡�
(1) ��ȫ�ʣ� ��
��
(2) ȷ�ʣ� ��
��
(3) ©���ʣ� ��
��
��2��ʾΪ��4�����Լ��У���ͨ��־�����ַ��������ܡ��ӱ�2��֪���ڳ��л����У���ͨ��־�IJ�ȫ�ʺ�ȷ�ʾ��ﵽ97%���ϣ����ַ��IJ�ȫ�ʳ���88%����ȷ������92%���ϣ����ڸ��ٹ�·�����У���ͨ��־�IJ�ȫ�ʺ�ȷ����ﵽ98%���ϣ����ַ��IJ�ȫ�ʳ���84%��ȷ����98%��������Ϊ�ڳ��л����У������ַ��ͽ�ͨ��־�϶࣬�һ������Ӷ�䣬ϵͳ�ļ��ȷ����ƫ�͡������ٹ�·�����У�·������Χ�ĸ���Ҳ�dz��٣��Ҳɼ�����ͼ����������պ������仯��С���ʼ���㷨�����ܸ��ڳ������������ܡ���ͨ��־���ʧЧ��ԭ����ҪΪ��ͨ��־����ľ��淴�䡢ͼ����ع���ȵȣ����ַ���λʧ����Ҫ���ַ���ռ���ؽ��٣�������ͷ�ļ������������ƶ�ʱ��ɵ�ͼ���˶�ģ���ȡ�
ͼ8(a)~(c)��ʾ�ֱ���ʾ���ٹ�·�������ַ��ͽ�ͨ��־�е�7��57��87֡�ļ������ͼ8(d)~(f)��ʾ�ֱ�Ϊ��ɳ������������ַ��ͽ�ͨ��־��Ϊ��1��31��43֡ͼ��ļ��������ͼ8���ú�ɫ���ο����ͨ��־�ļ������ʵ���������������㷨����Ч�ؼ������ٹ�·�ͳ����ڽ�ͨ��־�����ܹ���Ч�طָ����ͨ��־�е��ַ���
��2 �ַ��ͽ�ͨ��־����㷨����
Table 2 Performances of detection algorithm for traffic sign

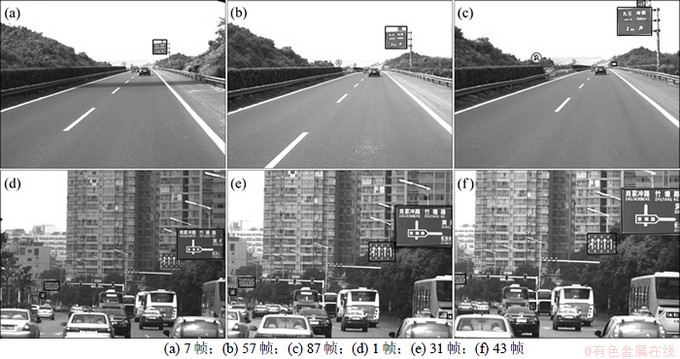
ͼ8 ��Ƶ�������ַ��ͽ�ͨ��־�����
Fig.8 Detection results of text traffic sign in video sequences
3.3 ����ʱ�����
��ͨ��־�ַ���λϵͳ��MATLABʵ�֣����Ի���Ϊ2.5 GHz Pentium(R)˫��CPU��3 GB�ڴ档��3��ʾΪ�����̵�ƽ������ʱ�䡣�ӱ�3�ɼ�����֡ͼ����ܴ���ʱ��Ϊ546 ms������VC++ʵ�֣���ķ�ʱ�佫��������ͣ��ܹ��������ܳ���ʵʱ��������Ҫ��
��3 ����ʱ�����
Table 3 Computation time analysis

4 ����
(1) ���ݽ�ͨ��־�ĵ�ɫ�����ָ�����ͼ������̬�˲�����״���ͼ���жϽ�ͨ��־�ĺ�ѡ������Otsu�㷨�����ѡ�����ڲ��Ҷȷֲ�ֱ��ͼ����ֵ���Էָ�������ַ��Ķ�ֵͼ��
(2) ��3����������㷨��ϳ���ѡ����ֱ��ˮƽ�����ϵ�ͶӰ���ߣ����ݾֲ���ֵ�������ҵ���������еľֲ���Сֵ�㣬�ָ����ѡ�������������ĵ����ַ����÷������ַ���������������ַ���Сʱ���������õ���Ӧ������ʵ��������÷��������ٹ�·�Ͻ�ͨ��־���ַ��IJ�ȫ�ʴﵽ84%���ϣ�ȷ�ȴﵽ98%���ϣ����ڳ��л����У���ȫ�ʳ���88%��ȷ������92%���ϡ�
(3) �ھ����Զʱ����ͨ��־�а������ַ���ռ���غ��٣��ڶ�λ����ͨ��־ʱ��Ҳ������Ч�طָ�����е��ַ�����ҲΪ������ѧ�ַ�ʶ��(OCR)������ѡ�������ʻʱ��ͼ��IJɼ������仯ǿ�ң����ա�������Ӱ�쵽�ɼ�ͼ����������������ַ���λ��ȷ�ȺͶԻ�����������Ӧ�ԣ�������⽻ͨ��־�������ַ������Լ������Ч��ʶ��������ַ����д���һ���о���
�ο����ף�
[1] Overett G, Petersson L, Andersson L, et al. Boosting a heterogeneous pool of fast hog features for pedestrian and sign detection[C]//IEEE Intelligent Vehicles Symposium. Piscataway, USA: IEEE, 2009: 584-590.
[2] Nunn C, Kummert A, Muller-Schneiders S. A two stage detection module for traffic signs[C]//2008 IEEE International Conference on Vehicular Electronics and Safety. Piscataway, USA: IEEE, 2008: 248-252.
[3] Garca-Garrido M A, Sotelo M A, Martn-Gorostiza E. Fast road sign detection using Hough transform for assisted driving of road vehicles[C]//10th International Conference on Computer Aided Systems Theory. Germany: Springer, 2005: 543-548.
[4] Belaroussi R, Tarel J. Angle vertex and bisector geometric model for triangular road sign detection[C]//2009 Workshop on Applications of Computer Vision. Piscataway, USA: IEEE, 2009: 1-7.
[5] de la Escalera A, Moreno L E, Salichs M A, et al. Road traffic sign detection and classification[J]. IEEE Transactions on Industrial Electronics, 1997, 44(6): 847-859.
[6] Ruta, Li Y, Liu X. Towards real-time traffic sign recognition by class-specific discriminative features[C]//Proceeding of the 18th British Machine Vision Conference. UK: BMVA Press, 2007: 399-408.
[7] Andrey V, Kang-Hyun J. Automatic detection and recognition of traffic signs using geometric structure analysis[C]//2006 SICE-ICASE International Joint Conference. Piscataway, USA: IEEE, 2006: 1451-1456.
[8] Nguwi Y, Kouzani A, Automatic road sign recognition using neural networks[C]//IEEE International Conference on Neural Networks. Piscataway, USA: IEEE, 2006: 3955-3962.
[9] Shadeed W, Abu-Al-Nadi D, Mismar M. Road traffic sign detection in color images[C]//Proceedings of 10th IEEE International Conference on Electronics, Circuits and Systems. Piscataway, USA: IEEE, 2003. 890-893.
[10] Maldonado-bascon S, Lafuente-arroyo S, Gil-jimenez P, et al. Road-Sign Detection and Recognition Based on Support Vector Machines[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(2): 264-278.
[11] Gil J E, Nez P, Basc O N S M, et al. Traffic sign shape classification and localization based on the normalized FFT of the signature of blobs and 2D homographies[J]. Signal Processing, 2008, 88(12): 2943-2955.
[12] CHEN Xilin, YANG Jie, ZHANG Jing, et al. Automatic detection and recognition of signs from natural scenes[J]. IEEE Transactions on Image Processing, 2004, 13(1): 87-99.
[13] ����ǿ, ɳ��. ���ڸĽ�SCW�ĵ�·��־���ַ���λ�㷨[J]. �й�ͼ��ͼ��ѧ��, 2007, 12(10): 1869-1872.
LIU Fuqiang, SHA Hao. An algorithm for the detection of text on road signs based on improved SCW[J]. Journal of Image and Graphic, 2007, 12(10): 1869-1872.
[14] Hanif S M, Prevost L. Text detection and localization in complex scene images using constrained adaboost algorithm[C]//10th International Conference on Document Analysis and Recognition. Piscataway, USA: IEEE. 2009: 1-5.
[15] ������, ���ܳ�, �״���. ��ֵ����[M]. ����: �廪��ѧ������, 2001: 51-59.
LI Qingyang, WANG Nengchao, YI Dayi. Numerical analysis[M]. Beijing: Tsinghua University Press, 2001: 51-59.
[16] ͬ�ô�ѧ��ѧ������. �ߵ���ѧ[M]. 4��. ����: �ߵȽ���������, 1996: 183-190.
Mathematics Staff Room of Tongji University. Advanced Mathematics[M]. 4th ed. Beijing: Higher Education Press, 1996: 183-190.
(�༭ ������)
�ո����ڣ�2012-07-04�������ڣ�2012-09-03
������Ŀ��������Ȼ��ѧ����������Ŀ(90820302��60805027)�����Ҳ�ʿ�����������Ŀ(195470)������ʡԺʿ����������Ŀ(20010FJ4030)������ʡ��Ȼ��ѧ����������Ŀ(12JJ6058)
ͨ�����ߣ�������(1938-)���У����������ˣ����ڣ����»����ˣ����ܿ��ƣ�ͼ������ģʽʶ���о����绰��0731-88877355��E-mail: zxcai@csu.edu.cn
ժҪ�����һ�ּ����к��ٹ�·�������ַ��ͽ�ͨ��־���·��������ȣ�������ͼ���зָ����ɫ��ī��ɫ��������̬�˲�����״���ͼ�жϽ�ͨ��־�ĺ�ѡ������Σ�����ѡ����IJ�ɫͼ��ҶȻ�����Otsu�㷨�����ѡ����Ҷȷֲ�ֱ��ͼ����ֵ����������зָ�õ������ַ��Ķ�ֵͼ��Ȼ����ѡ����Ķ�ֵͼ����ֱ������ͶӰ����3����������㷨���������ϣ��������ߵ����ʣ��ҵ���������еľֲ���Сֵ�㣬�ָ�������ַ����������������������ˮƽ�����Ͻ���ͶӰ��������ϣ����Ҿֲ���Сֵ�㲢�ָ�������ַ������ٽ�����̬���ˣ��ָ��λ��ͨ��־�е��ַ���ʵ�������������㷨���ַ���ȫ�ʸ���84%��ȷ�ʳ���92%��
