
��������������ģ�����Ĺ��������������
�˷�1, 2���½�1, 2
(1. ����������ѧ �Զ���ѧԺ��������100081��
2. ����������ѧ ����ϵͳ���ܿ�������߽������ص�ʵ���ң�������100081)
ժ Ҫ��
���㷺������ʽ��������Ĺ��������Ĺ���������⣬�ڸ���������������Ķ�������������������������ݵ���Ҫ���������һ�ֲ�������������ʹ�ö���ģ�͵Ĺ�����Ϸ������÷������ȷ�����������������ݱ仯�����������ݵ����������������ͨ��ģ�����жϹ������Ͳ���λ����λ�á����۷�����ʵ�����������÷������ڲ���ж����������������ȷ���ֺͶ�λ�����������ֹ��ϡ�
�ؼ��ʣ�
��������������������������������������ģ������
��ͼ����ţ�TP206.3 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0876-07
Optical encoder fault diagnosis based on characteristics of data and fuzzy logic
DENG Fang1, 2, CHEN Jie1, 2
(1. School of Automation, Beijing Institute of Technology, Beijing 100081, China;
2. Key Laboratory of Complex System Intelligent Control and Decision, Ministry of Education,
Beijing Institute of Technology, Beijing 100081, China)
Abstract: The fault diagnosis for a class of widely used digital parallel output optical encoder were focused. After definition of the optical encoder, the main features of the optical encoder��s output data were analyzed. A fault diagnosis method which did not rely on the system model where optical encoder used was proposed. The changes of optical encoder��s output data were analyzed. Then, the inherent characteristics were calculated. The fuzzy logic was utilized to determine the fault type and locate the fault location. Theoretical analysis and experimental results show that this method can diagnose and isolate optical encoder fault accurately without disassembly.
Key words: optical encoder; parallel output; fault diagnosis; data characteristics; fuzzy logic
����������һ�ֹ㷺ʹ�õĴ��������Թ��������Ĺ���״̬��������أ���ʱ���ֲ���λ���������Ĺ����DZ�֤������ʹ�ã����Ч�ʵ��������Դ������Ĺ���������⣬��Щ�о����ڴ�����Ӧ�ö����ģ�ͻ����ϣ�����Kalman�˲�����Ľ���ʽ��ͨ����ģ���з�ӳ������״̬�IJ����Ĺ�����ϴ������Ĺ���[1-4]������һЩ�о�����������ܷ�������Ϣ�ںϵķ�ʽ���й������[5-8]����ʵ��Ӧ�ù����У�����������Խ���ģ�ͣ�����ģ�͵ķ�����Ӧ�á�Ϊ�˰��Ѷ���ģ�͵����ƣ�����ѧ�߲���С���任[9-10]�ȷ����Դ�����������źŽ��з������������ֻ�ܷ��ֹ��ϣ����ڶ�λ���ϣ��Ҳ���ϵͳ��Ҫ����ѧϰ��ʵʱ�Բ�ǿ������������������������ʱ����û�вο��������ר�����ڲ��Ըô��������������������ڵ�����£���֪����������ǰ�����ʵֵ��������Ч��λ������ϡ����ճ�ʹ���У���������������������ݣ�����Щ�������ҳ����ɣ����ֲ�ͬ�������������������ǶԹ����������й�����ϵ���Ҫ;�������⣬����ɻ����Զ��б�λ����Ҳ��ֵ���о�����Ҫ���⡣
�ڹ��������Ĺ�������У�������ʽͨ���о��Ȳ��������������ʽ��
���Ȳ���ʱ�����������������ʱ������Ƶ�ʴ���һ������ѧ��ϵ��ͨ������ʱ�伴������������ĵ�ǰ��ν����ֵ����ʵ��ʹ���У�����������Ҫ���������������ṩ����Ƚϻ����ܲ��òв��жϡ���ֵ�жϵķ����Դ�����ֱ�ӽ�����ϡ����Ȳ��������ʺ������߹�����ϣ�һ����ר����������������ɣ�ͨ�������ݵ�ͳ�ƺͷ�������ȫ���жϴ������������������о�ȷ�ı궨����������������ڷ�ʵʱ�ij��ϣ��������ֲ�����������Ҫ���ú�ʵ�ü�ֵ��
�������ʱ��������������������ʱ�䡢����Ƶ�ʲ����ڹ̶�����ѧ��ϵ�����ڲ�ͬʱ�̽��в������������ʱ��ֻ���������ϵ��������ȷ��ijһ��ʱ�����������ֵ���������ֵ����������������صģ���λ�ơ��¶ȵȣ����Dz��������Ĵ�������Ϊ�궨������������ľ�ȷֵ�Dz���ֱ������ġ���������������ʵ��ϵͳ�зdz����������磬�Թ�����������������Ķ��ٸ�ʱ�䲻һ����ֱ�ӹ�ϵ�����ǽ���������ʹ����ϵͳ��һ�����ٶ��˶������ĽǶ����ֵ�ſ�Ԥ�⡣�����ʵ��ϵͳ�У�û�п��Ծ�ȷ�궨���ⲿ�������ڣ�������������Ĺ��������Ҫ�ھ������������������֮��Ĺ�ϵ������Щ��������ʱ��û��ֱ�ӹ�ϵ�����о��У�������Ҫ�ҳ�����ȶ��Ϳ���ȷԤ֪������������������������µĹ����������й�����ϺͶ�λ�����ַ�ʽ����Ӧ�������߹�����ϡ�
�����������һ��Ӧ�÷dz��㷺������ʽ������������������ڸ���������������Ķ���Ļ����ϣ�������������ݵ���Ҫ�������ҳ�һ�ֲ�������������ʹ�ö���ģ�͵Ĺ�����Ϸ������÷�������Ҫ�������������б궨��ͨ����¼�����㡢�������ж�������ݵ��������������ģ�����۷�����ɶԹ��ϵ��Զ���ϺͶ�λ��
1 ������
����1 ���ڹ��������������������������
![]() ��j=1, 2, ��, �� (1)
��j=1, 2, ��, �� (1)
���������������n���Ӻ�����������϶��ɡ����У�kΪ�����㣻�Ӻ���gi(xj)��������״̬(���ʸ�)��ɵĸ������������ں���������ÿ�������ڣ���ÿ��״̬���ֵĸ�������ȵģ�������ΪTi��Ƶ��Ϊfi��ͬʱÿ���Ӻ���֮���������¹�ϵ��
 (2)
(2)
ʽ�У�WijΪ�����Ӻ���֮��Ĺ�ϵ����Ԫ�ؼ������¹�ϵ������
![]() , i=1, ��n; j=1, ��, n (3)
, i=1, ��n; j=1, ��, n (3)
���ж���1�������ص�Ĵ�������Ҫ�в��ڹ�������������ģ����ͨ��A/Dת������������ģ����ͨ��A/Dת����ÿһλ��������Ӧ��ͬ��Ȩֵ��ͨ���������������Ȩֵ�˻��ĺ����ģ��������������ת�䣬ÿһλ�������ڶ�������������������״̬��1����0���ڦʽ����У�ÿһλ���������������Զ�Ӧ�ʸ�״̬������gi(xj)�ľ������ʽ�����������Ľ��ƺ���λ��״̬�����ģ����ڶ��������������������¹�ϵʽ��
![]() ��
��![]() (4)
(4)
��һ��Ŀ���ϵͳ����ҵϵͳ�У��������������Ĺ�������Ӧ��ʮ�ֹ㷺�����ص��������λ���࣬���ڽӳ����߶࣬������֮����һ������ϵ��������λ���࣬�߶࣬��ʹ�ù����У���������ijһ����߳��ֹ��ϣ����������Ϸdz����������������Ҫ������������ϵͳ�в������������⣬�����ڹ�����Ϲ����У���ʱȷ�ط��ֹ��������ĸ�����Ͽ��Դ����߹���Ч�ʣ�������ʧ��
2 ���ڹ�����������������
2.1 ����ͳ�Ƶ����������������
����1 �����㶨��1�Ĵ���������һ��ʱ���ڣ�����������Զ������״̬�������Ҹ������߲���ֵ��������������״̬ʱ����ÿһ�ߵ�����ƽ��ֵ�ӽ���
 (5)
(5)
ʽ�У�![]() Ϊ������ÿһλ�����ܵ�״̬������ͬʱ����������Խ�࣬��ֵԽ�ӽ�������ֵ��
Ϊ������ÿһλ�����ܵ�״̬������ͬʱ����������Խ�࣬��ֵԽ�ӽ�������ֵ��
֤�����ɶ���1��֪��gi(xj)Ϊ���ں��������![]() ��״̬����һ�����������У�ÿ��״̬���ֵĸ�����ͬ����ÿ��״̬���ֵĸ���ΪPj(xj)���������ΪK��ÿ��״̬��������������Ϊkj�������¹�ϵʽ������
��״̬����һ�����������У�ÿ��״̬���ֵĸ�����ͬ����ÿ��״̬���ֵĸ���ΪPj(xj)���������ΪK��ÿ��״̬��������������Ϊkj�������¹�ϵʽ������
![]() (6)
(6)
![]() (7)
(7)
����״̬��ֵ��Ϊ
![]() (8)
(8)
ÿһ�ߵ�ƽ��ֵ�У�
 (9)
(9)
���������㹻�࣬����ÿ��״̬�ĸ��ʾ�Խ�ӽ�������

 (10)
(10)
��![]() ʱ����ʽ��Լ���ںſ��Ա�ɵȺš���֤��
ʱ����ʽ��Լ���ںſ��Ա�ɵȺš���֤��
���ݶ���1���Զ����ƴ���������![]() �����Զ����ƴ�������ÿһ�ߵ����ݾ�ֵ�ӽ�0.5��
�����Զ����ƴ�������ÿһ�ߵ����ݾ�ֵ�ӽ�0.5��
�ڶ���1�Ļ����ϣ��������ڲ�����ľ�����ֵ������Ҫ����Ĵ��������б궨��ֻҪ�������㹻�࣬���Ҿ������Ǹ��ֿ��ܵ�״̬���Ϳ��Ը��ݸ������ϵľ�ֵ���жϸ����Ƿ�������
2.2 ������ر仯�����������������
��ϸ�о�����1�Ϳ��Կ���������1���ڵ�ͳ����ѧ�ķ�������Բ��ڹ���������������״̬��ƽ��ֵ�ó���Ͻ��ۣ������ķ�������һ����ȱ���ԣ���������Ҫ�㹻��ֻ�е����������㹻��ʱ������Խ���ȣ�����۲�Խȷ��Ϊ����������⣬���Ǹ��ݶ���1�д��������ص㣬���ȸ������¶��壺
����2 ״̬�仯������һ���IJ�����Χ�ڣ��Բ��ڹ�������ÿһλ�ϵIJ������ݣ���һ��״̬��Ϊ��һ��״�Ĵ�����
�Զ���1�еĴ���������ÿһ�ߵ�ÿ�����ڵı仯����Ϊ![]() �Ρ�
�Ρ�
����2 �����㶨��1�Ĵ��������������������K������������ݷ�ΧΪ0~�ã���ô��״̬�仯��m��ÿ�ߵ�Ƶ�ʳ����ȣ����ߵı仯��֮���������¹�ϵ��
 ��
��![]() (11)
(11)
![]() , i=1, ��,
, i=1, ��, ![]() ; j=1, ��,
; j=1, ��, ![]() (12)
(12)
![]() , i��
, i��![]() or j��
or j��![]() (13)
(13)
ʽ�У�![]() ��ʾ����������ݷ�Χ�IJ�Ϊ0�����λ�����������¹�ϵ��
��ʾ����������ݷ�Χ�IJ�Ϊ0�����λ�����������¹�ϵ��
![]() ��
��![]() ��
��![]() (14)
(14)
ͬʱ����������Խ���Ұ�����״̬Խ�࣬��ֵԽ�ӽ���Wij������������ʱ��λ��Խ�ߣ���仯��ֵԽ�ӽ���ʽ(11)��
֤�����ɶ���1��֪��gi(xj)Ϊ���ں�������������ʽ(2)�� �ɶ���2�����������ݷ�Χ�������¹�ϵʽ��
![]() ��
��![]() ��
��![]() (15)
(15)
��֪ÿ��λ�ı仯����֮�������¹�ϵ��
![]() (16)
(16)
��������Χ������ȫ�������б仯��ʱ���У�
![]() ��n (17)
��n (17)
��j��![]() �����ϱ仯Ϊ0�����У�
�����ϱ仯Ϊ0�����У�
![]() , j��
, j��![]() (18)
(18)
ʽ�У�![]() Ϊ�������ݷ�Χ�IJ�Ϊ0�����λ��ֵ��
Ϊ�������ݷ�Χ�IJ�Ϊ0�����λ��ֵ��
��λ�仯����֮�������¹�ϵ��
![]() (19)
(19)
�����������������еģ���λ�仯�죬�������������ͻ�©�������Ϣ������ʽ(19)���õ���Լ���ڣ�������������Խ���Ұ�����״̬Խ�࣬ʽ(19)Լ���ڷ������ߵ�ֵԽ�ӽ���
�ۺ�ʽ(16)��(19)�����Եó�����2�������Ľ��ۣ�������֤��
���ݶ���2���Զ����ƴ���������![]() ������һ��nλ�Ķ����ƴ���������������ֵ
������һ��nλ�Ķ����ƴ���������������ֵ![]() ����
����![]() ��
��![]() �����iλ�ı仯������ʽ��
�����iλ�ı仯������ʽ��
![]() (20)
(20)
�ڶ���2�Ļ����ϣ��������ڲ�����ľ�����ֵ������Ҫ����Ĵ��������б궨��ֻҪ��¼������ÿһλ�ı仯�������Ϳ��Ը��ݸ������ϵı仯�������жϸ����Ƿ���������Ȳ���ÿһλ��Ƶ�ʡ����ڻ��Ǽ���ƽ��ֵҪ�ö࣬������С���ʺϽ������ߵĹ�����ϣ�û�и��ӵļ��㣬�ʺ�Ƕ��ʽ����ϵͳ��Ӧ�á�
3 ����ģ�������Ĺ������
Ϊ��϶���1�Ͷ���2���ŵ㣬����ģ�������ķ����Թ��Ͻ��ж�λ��
3.1 ģ������
�贫����������������ΪX��{x1�������ϵ�״̬�仯����x2�������ϵ�����ƽ��ֵ��x3�������ϵ�����ֵ}��������Ϊģ������������ռ䡣
���ݲ��ڹ����������������������仯��������ƽ��ֵ���й�һ�����������Ԫ��ȡֵ��ΧΪ��
![]() ��
�� ��
��
![]()
���õIJ��ڹ��������Ĺ��϶�Ϊ��·���ӵغͶ�·���ϣ������贫�����Ĺ��ϼ�ΪY��{y1����·���ϣ�y2���ӵع��ϣ�y3����·����}��ȡֵ��ΧΪ[0,1]��
����������������������ֵ����ģ���������������������ĵ���ȡֵΪ��
x1=1, x2=1, ![]()
�Զ����ƴ�����Ϊ��
������ռ�Ϊ��
![]() ��
��![]() ��
��![]()
����ȡֵΪ��
![]() ��
��![]() ��
��![]()
���ϼ��ĵ���ֵΪ�������Ϸ���ʱΪ1������ʱΪ0��
�������ݲ��ϵ����ƹ���⣬ÿ����������Ŷ��ɳ˻�����ȡ�ã�����ʵ�����ݼ������Ŷ����ӴӶ�����ר�����������������ƽ��ģ��������ʽ�����j�����yj��
 (21)
(21)
ʽ�У�![]() ��������������Ӧ�����Ŷȣ�Oi��ʾ��i�������������䣻
��������������Ӧ�����Ŷȣ�Oi��ʾ��i�������������䣻![]() Ϊ��j���������Oi��ʹ����������ȡ�õ�λֵ1�����е��У��������ֵ��С�ĵ��ȡֵ��MΪģ���������Ŀ��
Ϊ��j���������Oi��ʹ����������ȡ�õ�λֵ1�����е��У��������ֵ��С�ĵ��ȡֵ��MΪģ���������Ŀ��
3.2 �������
�Զ���1�Ͷ���2Ϊ���ۻ���������������ڹ�������������Ϸ��������Է�Ϊ���¼�����ɣ�
��1���������������������¾����ࡢ�����ܾ��ȵĽ��в�������������KԽ��Խ���ȣ���Ͻ��Խȷ����������������࣬��仯�ı�����ϵ��Ȼ���ڣ�������Ӱ�����жϡ�
��2������¼���������ϵ�״̬�仯ֵmi, (i=1, 2, ��, n)���ڲ�������ʱ����Ҫ��¼��λ�����ݣ��Թ����ϸ���ʹ�á�
��3�����ҳ���״̬�仯�����λ![]() �����λ
�����λ![]() ���ɲ�����Χ
���ɲ�����Χ![]() �����ģ�������ʽ��
�����ģ�������ʽ��
![]() ��
��![]() ��
��![]() (22)
(22)
��4������һ��������
![]() , i=1, ��, n (23)
, i=1, ��, n (23)
��ʽ(15)��(23)��֪����i��![]() ʱ���У�
ʱ���У�
![]() ,
, ![]() (24)
(24)
��ʽ(23)��(24)���Ը��������ж���֮һ��
![]() (25)
(25)
��5��������ģ�������й����ж��붨λ��
��ʽ(25)���Կ�������![]() ����ʽ(25)ʱ����ʾ�������������ԶԶ���ڻ���С��1�������߹��ϡ����һ����ı仯������0�����ߵ�ֵһֱΪ��������Ϊ��·���ǽӵع��ϣ����Ǽ����߱仯��ͬ������������·��
����ʽ(25)ʱ����ʾ�������������ԶԶ���ڻ���С��1�������߹��ϡ����һ����ı仯������0�����ߵ�ֵһֱΪ��������Ϊ��·���ǽӵع��ϣ����Ǽ����߱仯��ͬ������������·��
�ڲ���������ʱ����λ�������Ϣ��ʧ�������һ�����ֵС��1����ʱ�ɸ��ݶ���1�����ݼ�����ܳ��ֹ��ϵĵ�λ��ƽ��ֵ�����㶨��1��Ϊ�������ݣ������㶨��1�ģ������ȷʵ���ڡ�ͬʱ�����ֹ���ʱ����һ��������ݻ����ͻ�䣬���![]() ��ֵԶ���ڻ�С���ھ��߱仯���ľ�ֵ�����ж�����ϡ��Զ����ƴ����������ƽ��ֵƫ��0.5��������߹��ϣ�����������
��ֵԶ���ڻ�С���ھ��߱仯���ľ�ֵ�����ж�����ϡ��Զ����ƴ����������ƽ��ֵƫ��0.5��������߹��ϣ�����������
���ý����������������ϵĹ�����Ϸ������������ߵ��жϲ��ڹ��������������ϵ�״̬����ʱ�ķ��ֲ���λ���ϡ�
4 ʵ����
�Գ��õIJ��ڹ�������Ϊ������ʵ�飬���ڹ����������������̱�ʾΪ�����ߵĶ����Ƽ�Ȩ�ͣ����磬nλ����ʽ�����������������������������ת���ɵ�ѹ����ͨ��A/Dת�����nλ�����źţ�nλ����ʽ����������һ��Բ��360��ֳ�2n�ݣ�����ÿһλ��ȨֵΪ2i-1���������ֵ���������¹�ϵʽ����ʾ��
![]() (26)
(26)
��ʵ���У�������ij15λ����ʽ��������Ϊ�����о���˵����
ʹ��ר�����ڹ����������Ե�ר�ò���̨[11]���в��ԣ��ò���̨�������ò���ʱ�䣬���Կ��ƹ���������һ���IJ�����ת��
ͼ1��ʾΪ�����еĹ���������������������ģ�����仮�ּ���������������y1��y2��y3���ֶ�Ϊy��
������Ҫ��ģ����Ϲ������£�
����1 ���x1ΪCE����y1ΪS1��
����2 ���x1ΪS1��x2ΪB1����y1ΪB1��
����3 ���x1ΪS1��x2ΪS1����y2ΪB1��
����4 ���x1ΪB1����y3ΪB1��
ͼ2��ʾΪ��������������µ���������źţ������ֶ�ת�������������õ����ϲ����źš�
ͼ3��ʾΪ�д����ԵĹ����źţ�����ͬʱ���ֶ�����ϵ��ֶ���������źš�
ͼ4��ʾΪ��1ʵ��5�й����źŵ�ÿһλ�ı仯����ƽ��ֵ�����Կ�������5λ�Ͽ������Ա仯��Ϊ0����ֵ��һ��������Ϊ2����8λ�ӵأ��仯��Ϊ0����ֵΪ0����4λ�͵�10λ�仯����ͻ�䣬�Ҿ�ֵ��ͬ���Ӷ���ģ�������ķ����ó��˹��ϡ�
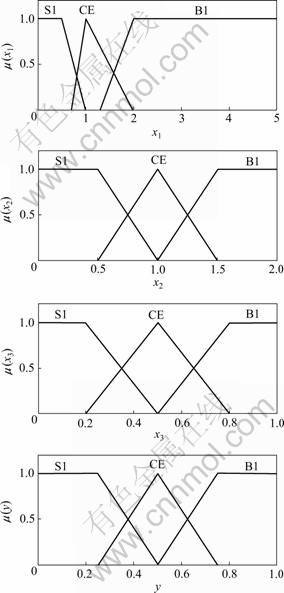
ͼ1 ������������ģ�����仮�ּ���������
Fig.1 Range of input and output fuzzy interval and membership function
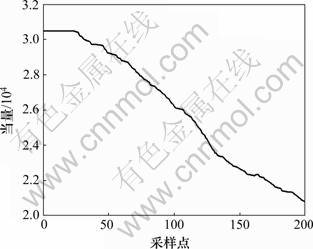
ͼ2 ʵ�������ź�
Fig.2 Actual measurement of normal signal
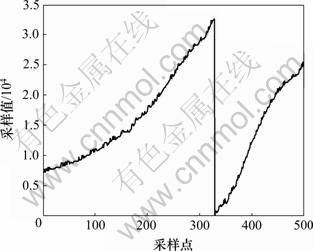
ͼ3 ʵ������ź�
Fig.3 Actual measurement of fault signal
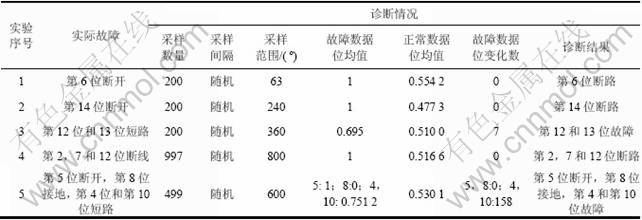
��û�в���װ�ð���������£����������ת���������������ò���̨��������֤��������������±����㷨�Ƿ������Ч����ϳ���Ӧ�Ĺ��ϡ���ͬһ����ʽ�����������в��ԣ������20��ʵ�飬���ڲ�����ʵ��ʹ�ù������㷨�Ĺ������Ч�������д����Ե�5�����������1���С�
�ӱ�1���Կ��������ñ���������������ȷ��ϳ�����ʵ������¹��������Ķ�·����·�ͽӵع��ϣ��Զ���ͬʱ�����Ĺ���Ҳ����ȷ��ϡ�
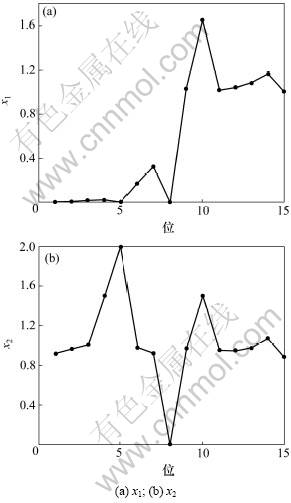
ͼ4 �����źŵ���������ֵ
Fig.4 Characteristic value of fault signal
��1 �������������Ͻ��
Table 1 Fault diagnosis results in random sample
5 ����
(1) ������һ������ʽ���ڹ���������Ҫ���������Ļ����ϣ���������������ݵ�������ϵ�������˲�ͬ���������µĹ�����������ͳ��������������ر仯����������ģ�������ķ������ϣ��ɹ��ؽ������ʵ��ʹ�ù����еIJ��ڹ��������Ĺ���������⡣
(2) �ھ��Ȳ�������������������£�����������ȷ���ֺͶ�λ���ڹ����������ֹ��ϣ�������һ����ʵʱ�ԣ�����Ӳ����Ҫ��ͣ���һ��ʵ�õĴ�������������붨λ������
�ο����ף�
[1] Li W, Shah S L, Xiao D. Kalman filters in non-uniformly sampled multirate systems: For FDI and beyond[J]. Automatica, 2008, 44(1): 199-208.
[2] �ܶ���. һ�ַ�����ϵͳ�Ĵ��������ϼ��������·���[J]. �Զ���ѧ��, 1995(3): 362-365.
ZHOU Dong-hua. A new approach to sensor fault detection and diagnostics of nonlinear systems[J]. Acta Automatica Sinica, 1995(3): 362-365.
[3] ������, ������, �ź�Ȼ. ���ڿ������˲����Ĵ������������[J]. �����DZ�ѧ��, 2005(S1): 79-80.
XU Xiu-ling, WANG Xiao-dong, ZHANG Hao-ran. Sensors fault-diagnosis based on accommodation Kalman filter[J]. Chinese Journal of Scientific Instrument, 2005(S1): 79-80.
[4] Hajiyev C, Caliskan F. Sensor/actuator fault diagnosis based on statistical analysis of innovation sequence and robust Kalman filtering[J]. Aerospace Science and Technology, 2000, 4(6): 415-422.
[5] Jaradat M A, Langari R. A hybrid intelligent system for fault detection and sensor fusion[J]. Applied Soft Computing. 2009, 9(1): 415-422.
[6] Yu D L, Gomm J B, Williams D. Sensor fault diagnosis in a chemical process via RBF neural networks[J]. Control Engineering Practice, 1999, 7(1): 49-55.
[7] Salahshoor K, Mosallaei M, Bayat M. Centralized and decentralized process and sensor fault monitoring using data fusion based on adaptive extended Kalman filter algorithm[J]. Measurement, 2008, 41(10): 1059-1076.
[8] Okatan A, Hajiyev C, Hajiyeva U. Fault detection in sensor information fusion Kalman filter[J]. AEU-International Journal of Electronics and Communications, 2009, 63(9): 762-768.
[9] Xu X, Xiao F, Wang S. Enhanced chiller sensor fault detection, diagnosis and estimation using wavelet analysis and principal component analysis methods[J]. Applied Thermal Engineering, 2008, 28(2/3): 226-237.
[10] Qi J, Han J. Application of wavelets transform to fault detection in rotorcraft UAV sensor failure[J]. Journal of Bionic Engineering, 2007, 4(4): 265-270.
[11] �˷�, �½�, �����, ��. һ�ָ߾��ȵĹ���������ⷽ������װ��[J]. ����������ѧѧ��, 2007, 27(11): 977-980.
DENG Fang, CHEN Jie, CHEN Wen-jie, et al. High precision test method and apparatus for photoelectric encoder[J]. Transaction of Beijing Institute of Technology, 2007, 27(11): 977-980.
(�༭ ��ѧ��)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��ʡ�����ص�Ԥ�л���������Ŀ(9140A17051010BQ0104)������������ѧ���������ʦ�����ƻ���չ��Ŀ(2010)
ͨ�����ߣ��˷�(1981-)���У��Ĵ��ϳ��ˣ���ʿ����ʦ�����·�����ϵͳ�������������о����绰��010-68948971��E-mail: dengfang@bit.edu.cn
ժҪ�����һ��Ӧ�÷dz��㷺������ʽ��������Ĺ��������Ĺ���������⣬�ڸ���������������Ķ�������������������������ݵ���Ҫ���������һ�ֲ�������������ʹ�ö���ģ�͵Ĺ�����Ϸ������÷������ȷ�����������������ݱ仯�����������ݵ����������������ͨ��ģ�����жϹ������Ͳ���λ����λ�á����۷�����ʵ�����������÷������ڲ���ж����������������ȷ���ֺͶ�λ�����������ֹ��ϡ�
