
��������Ļ���ԭ�������
���Ӿ꣬�ѽ�����ׯ����ά�£�������
(1. �Ϻ���ͨ��ѧ ��еϵͳ�������ص�ʵ���ң��Ϻ���200240��
2. �Ϻ���ͨ��ѧ ҽѧԺ�������ҽԺ���Ϻ���200240��
3. ��������ҵ��ѧ �����˼�����ϵͳ�����ص�ʵ���ң������� ��������150080)
ժ Ҫ��
�����ʵ��������ſ�ҧ���Լ���ʳ����ΪĿ�꣬��������Ľ���ѧԭ����ͨ������ѧ�빤��ʵ�����ϣ�������ĸ����˶���Ϊ3�������˶���ͨ�������˶�ģ�ͶԷ���������������˶�ѧ������ѡ����ʵĻ������β����������������ģ�ͣ�ʵ����Ԥ�ڵ������˶�ģʽ��
�ؼ��ʣ�
��ͼ����ţ�TH113 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0478-05
Mechanical principle and design of bionic snake mouth
LIU Zi-juan, FEI Jian, FU Zhuang, YAN Wei-xin, ZHAO Yan-zheng
(1. State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China;
2. Ruijin Hospital Affiliated to Shanghai Jiao Tong University School of Medicine, Shanghai 200240, China;
3. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China)
Abstract: To realize open bite and swallows movements of the snake mouth. Bionic snake mouth mechanism was designed based on the anatomy of snake mouth and the combination of bionics and engineering, and the motion of snake mouth was divided into three basic movements. Mechanism kinematic analysis was made and linkage parameters were determined for implementing the motion of snake mouth��Then the virtual model was made and the desired motion was realized.
Key words: bionic mechanism; snake mouth; kinematic analysis
����ѧ��ģ�����ィ�켼��װ�õĿ�ѧ��������ѧ����ѧ���̼���ѧ����������ϳɵ�һ�����˵ı�Ե��ѧ������Ȼ�������Ľ��������У������岻����Ӧ��Ȼ����չ�˶��صĽṹ�����ܺ��˶�ģʽ��1960�꣬������ѧ��Steel J. E.�����˷���ѧ���ӷ���ѧ��������չ����̶̼�ʮ��ʱ���������ľ��ɽṹ���˶�ԭ������Ϊ��ʽ���ѳ�Ϊ������ѧ����ģ�µĶ���[1]�����У������ද�����������Ľ���������Ϊ����Ӧ�������������, ��̬�Ϸ���������仯���ӹ��̹۵��������������ṹ���ŷdz���ӱ�Ĺ������ԡ�Ŀǰ���ߵķ����о���Ҫ�������ߵ���֫�˶����棬�ձ�������ѧ��Hirose���ڴӷ���ѧ�Ĺ۵��о����л����ˣ���1972�������˵�1̨���λ���������[2]�������ܹ��Ŵ������������������ͨ������ֻ���Ŵ�30�㣬������ȴ���Ŵ�150�㣬��˶���������������о�������Ҫ�Ŀ�����Ӧ�����塣���������ѧ�ͻ����˶�ѧ������о���չΪ����������о��ṩ�����ۻ������о�������
1 ��������Ļ���ԭ��
1.1 ����Ľ���ѧԭ��
�����Ĺ���������������ȴ��ںܴ�ͬ������������������ʹ������������3������ͷ����������ӵķ��ιǡ���״�ǡ�����״�ǿ�������˶�,��ʹ������������������ſ����ܴ�Χ��һ��ɴﵽ150�����ϡ������������Ĺ�������ǰ����Ϊһ�壬����ͨ��������ʹ���֯������ʹ�������������ಿ�ֿ��Է��벢�˴˶������ƶ���������첻�����¿����ŵúܿ�����������Ҳ�������ƣ���ʹ���ߵ�����ǰ���ൽ�������ԡ����ͨ���������ӵ������ǵ�����������һ��˫�ؽڽ���������������λ��ʹ��ǻ�ܹ����ŵ��ܴ�ķ�Χ��
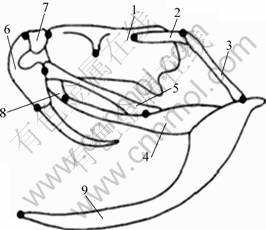
������������������ɢ�Ĺؽ����ӷ�ʽ��ʹ������кܴ������ԣ��Ӷ��߿��������������������Ҫ���������ϵ��ʹ����ؽ��Լ�������֯��Э��������ʵ�ָ��ิ���˶�[3]����ͼ1��ʾΪ��ͷ���Ĺ�������ʾ��ͼ��

ͼ1 ��ͷ����������ʾ��[4]
Fig.1 Morphology of snake skull elements
�ߵ�ͷ������������һ����Χ���Ƽ���ǰ����ת�������ͷ���ĸ����ֹ�������˶��������������һ���ջ������˻���������������˶���Զ�����Kardong��[5]�Ծ��д����Ե���β����Ϊ�о���������Ĺ�������Ϊһ��ͨ�����ؽڽ½ӵ����˻�������ͼ2��ʾ��
ͼ2 ��β���������ģ��
Fig.2 Mechanism of Rattlesnake mouth
�������ſ�ʱ��ͷ������̧�𣬷����϶������ת��ʹ����̧�𣬼������������ͬʱ��������ſ�����ҧס�������������������������˶���һ�ߵ��ҧס�����һ�ߵ���������ſ������õ���״�����ݽ�������ק������У���˷��������������븹�С����⣬����������ǰ�����Ӳ������ɼ�����ʹ���֯�����ģ�����ʳ����ʱ���Ӳ��ֿ��Էֿ�������������Ŀ��ȡ�������������ֹ�����������һ���̶��Ͼ�����ɢ�ԣ����Ұ�Χ������������Ƥ���кܴ�ĵ��ԣ������ߵ����ܹ��ſ��ܴ����ܹ����±�����������ܶ�����
1.2 ������������Ŀ��
������������Ŀ����ʵ��������ʳ������˶���ʽ������Ȼ���ߵ�����࣬����ṹ���Ӷ�����ͨ������ѧ�빤��ʵ�����ϣ�ȡ�������Ҫ���ܣ�ѡ����β����Ϊ����������д����ԣ��ɽ��������ʳ�˶���Ϊ2���Σ���1��Ϊ������ſ���ҧס����ĽΣ���2��Ϊ�����ҧס���ﵽ���������µĽΡ���1����ҪΪ������ſ���ҧ���˶����ߵ���������ſ���ͬʱ���ι������״���ſ�����ʹ����̧��ҧס�����2�μ���ʳ������ҪΪ�߽����������븹�еĹ��̡�
1.3 ��������Ļ���ԭ��
��Է�����������Ŀ�꼰Լ���������������������̬ѧ�����ۻ����϶������ģ�ͽ��г�������з�������Ļ�����ơ���������Ļ������������֣����ֺ����֡�
���ֿɿ�����һ���ջ������˻�������ͼ2�У�2��5��7��8��ʵ��������Ҫ�˶�Ӱ�첻�����ǽ��������ģ�ͼ�Ϊһ������ԳƵĽ����ĸ˻�����ͼ3��ʾΪ��������Ļ���ͼ���Գ������˻����ɸ�4ͨ���½ӵ�D�Լ�D1�����������������̧��������4̧��ҡ��1��Ϊ�������룬ͨ��ҡ��1������ת���ĵİڶ�������2��3���˶���ʵ���������������ſ���ҧ�ϣ�ͨ���������˶����������ﱻ���룬����ʵ�����������˶���
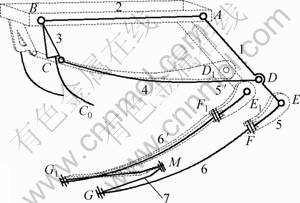
ͼ3 �����������ͼ
Fig.3 Mechanism of bionic snake mouth
�����ɸ�5ͨ��ת����E���1��������ʵ�������ſ���պϹ��ܣ���5���6ͨ����ת����E���ߴ�ֱ��ת����F��������ʵ�������������������ſ���պϡ���������������ǰ�˵������ɼ�����ʹ���������Ҫʱ���Էֿ���ʹ����IJ����ſ��������ڻ�е����ʵ�ֿɷ�һ��Ƚ����ѣ�����������˻���������ɷ���ʵ�������һ����Χ�ڵIJ���չ�����ջء������������Ϊ�Գƽṹ��ǰ��������Mת�������ӡ�
2 �����˶�ѧ����
�����������4������ҡ���ĸ˻�����1�İڶ������Ϊ��1���ڶ���ΧΪ�ռ�����ΪC0�������3�ĽǶ�Ϊ��3��ת����ΧΪ�ȡ���1��Ϊ�����������ٶ�Ϊ��1���Ǽ��ٶ�Ϊ��1�������ļ��β�����ͼ4��ʾ��

ͼ4 �������ҡ�˻������β���
Fig.4 Parameters of the upper jaw mechanism
�Խ½ӵ�DΪԭ�㽨�����������������ϵ����ͼ5��ʾ���ι�ϵ�����˶�ѧ�������£�
 (1)
(1)
��ʽ(1)�ɵ�
 (2),(3)
(2),(3)
����
![]() ��
��
![]() ��
��
��ʽ(2)��æ�3������ü�����C1λ�õı仯���ɣ����1�����1��ʱ��ı仯��ϵΪ��
![]() (4)
(4)
ʽ�У���Ϊ����������ʽ(4)���ɵõ������˼��нǦ�3��ʱ����˶����ɣ���ʱ��������ɵõ��ٶȺͼ��ٵı仯���ɣ�����������C0���˶�����Ҳ����á���һ�����������������������������û����Ķ���ѧ���ԡ�
3 ������Ļ���ģ��
3.1 ���������������
����ģ����۳ߴ�Ϊ285 mm��130 mm��65 mm��������ȫ�ſ���۳ߴ�Ϊ235 mm��185 mm��270 mm��ͼ5��ʾΪ��������Ļ���ģ�͡����У����ָ������˵ijߴ�Ϊl1=80 mm��l2=160 mm��l3=47.5 mm��l4=185 mm���˳�Ϊl5=214 mm��l6=96 mm��ҡ������Ƕȷ�ΧΪ��1=30��~90�㣬���������ſ������Ƕ�Ϊ150�㣬������չ��������Ϊ185 mm��������ſ�������Ϊ425 mm��
ͼ5 �����������ģ��
Fig.5 Virtual model of bionic snake mouth mechanism
���Ƿ��������С�ͻ����˶��ռ�Ͳ���������ԣ������ĸ��˶������ø�˿ǣ����ʵ�֡���˿ͨ����˨�̶����˶��˼��ϣ���ͨ����֧�����õĵ��ֺ���λ���õ���˨�����ӵ�Զ�˵ĵ����ͨ���������ת������˿ǣ������ʵ���˶�����������Ϊ�Գƽṹ��������ͬλ�ø�˿��ͬһ������ƣ���֤���˶���Э���ԡ�
3.2 ������������˶�����
��1�İڶ�����ת����Ϊ�仯��ϵΪ![]() ��
��![]() �����˶�ѧ������֪��3������ʱ��ı仯���ɣ�ͼ6��ʾΪһ���˶������ڽǶȺͽ��ٶȵı仯���ߡ�ͼ��0~1 sΪ�����ſ�ʱ�䣬1~2 sΪͣ��ʱ�䣬2~3 sΪ����պ�ʱ�䡣
�����˶�ѧ������֪��3������ʱ��ı仯���ɣ�ͼ6��ʾΪһ���˶������ڽǶȺͽ��ٶȵı仯���ߡ�ͼ��0~1 sΪ�����ſ�ʱ�䣬1~2 sΪͣ��ʱ�䣬2~3 sΪ����պ�ʱ�䡣
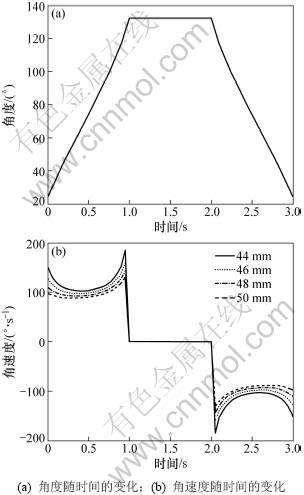
ͼ6 �ǶȺͽ��ٶ���ʱ��ı仯
Fig.6 Variations of angular displacement and velocity of output link
��ͼ6��֪����3���˶���ΧԼΪ130�㣬��������������˶�ԭ����
3.3 ���������Ż�
��������ʵ�ʵijߴ磬�ڱ�֤����������������£�l3��ȡ�ijߴ�Ϊ24~52 mm���ɻ����˶������ó�Լ������Ϊ����1=30��ʱ����3��180�㣬�Ҧ�3������1=90��ʱ����2+��3��180�㣬�Ҧ�3����С������������������Ҫ���3�Ľ��ٶȦ�3������С����ͼ6(b)��֪�����Ÿ˼�3�ߴ�������ٶ����ſ��ͱպϹ����еı仯����ƽ�ȡ������ųߴ�����3���˶���Χ��С����1��ʾΪl3�仯ʱ��3�ij�ʼ�뼫�Ƕ��Լ����ٶȵ����ֵ��
��1 ��3�ߴ�仯ʱ��Ӧ�Ƕȡ����ٶ�
Table 1 Corresponding angular displacement and velocity of output link
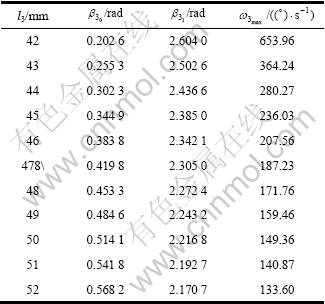
�ۺϸ�Լ���������˶�ƽ���ԣ��ɱ�1�ɵõ�����Ļ�������Ϊl3=47��l3=48 mm��ȡl3=47.5 mm����ʱ��3�IJ�����С�ұ�֤���˶���Χ��
4 ����
ͨ������������˶�ԭ������Ʒ������������ʵ�������ҧ���������˶������˶�ѧ�����Ļ�����ѡ����ʵĻ������β���������ʵ���˽�Ϊ�����������ʽ����������Ƶ���������ľ��ɸ�˿ǣ��ʵ�ָ��˶������нṹ����������ŵ㣬����С�ͻ���Զ�̲����ij��ϡ�
�ο����ף�
[1] ������. �Ӿ������ѧ[M]. �Ϻ�: ֪ʶ������, 1985: 15-20.
WANG Gu-yan. Vision and bionics[M]. Shanghai: Knowledge Publications, 1985: 15-20.
[2] Endo G, Togawa K, Hirose S. Study on self contained and terra in adaptive active cord mechanism[C]//Proceedings of the 1999 IEEE International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 1999: 111-117.
[3] Frazzetta T H. Studies on the morphology and function of the skull in the Aoidae (Serpentes).Part 11. Morphology and function of the jaw apparatus in Python sebae and Python molurus[J]. Morph, 1966, 118: 217-296.
[4] Skeleton of a venomous snake: head[DB/OL].Visual Dictionary Online.http://visual.merriam-webster.com/animal-kingdom/reptiles/snake/skeleton-venomous-snake-head.php.
[5] Kardong K V, Dullemeijer P, Fransen J A M. Feeding mechanism in the rattlesnake[J]. Amphibia-Reptilia,1986, 7: 271-302.
(�༭ �Կ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(61075086)����еϵͳ�������ص�ʵ������������������Ŀ(MSV-MS-2010-03)�������˼�����ϵͳ�����ص�ʵ���ҿ����о���Ŀ(SKLRS-2010-ZD-06)
ͨ�����ߣ��ѽ�(1972-)���У����ո����ˣ�������ҽʦ����������Ƽ�ҽ��������Ŀ�о����绰��13701769798��E-mail��feijian@hotmail.com
ժҪ��������������������ʵ��������ſ�ҧ���Լ���ʳ����ΪĿ�꣬��������Ľ���ѧԭ����ͨ������ѧ�빤��ʵ�����ϣ�������ĸ����˶���Ϊ3�������˶���ͨ�������˶�ģ�ͶԷ���������������˶�ѧ������ѡ����ʵĻ������β����������������ģ�ͣ�ʵ����Ԥ�ڵ������˶�ģʽ��
