
�������ƶ����š����ƶ�������ͨ��ϵͳ
��Тƽ1��������1������1�����ְ�1, 2
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
2. ��̶��ѧ ��Ϣ����ѧԺ������ ��̶��411105)
ժ Ҫ��
ժ Ҫ�����Ŀǰ���ƶ�������ͨ��ϵͳͨ���Խϲ�����⣬���һ�����ƶ�������ͨ��ϵͳ���ԭ�������ƶ����Ŷ��ƶ������˲���ֱ��ͨ�ŵķ�ʽ�������ƶ��������Ľṹ�齨ͨ�����磬�����һ�����ڴصĶ������ͨ��Э����л����˼��ͨ�ţ���WindowsXPϵͳƽ̨������ʵ�֡���ͨ��ϵͳ��Ӧ����װ��Windows XP����ϵͳ���ƶ��������ϣ�����һ����ͨ���ԡ��ڶ��ƶ��������Ŷ��϶Ը�ͨ��ϵͳ����ʵ�顣�о�����������ؽṹ���ع�ʱ��Լ1 s���ŶӼ������������Ŷӵ�ʱ��Լ1s��Ѱ�Ҵ���·����ʱ��С��1 s�����⣬�ɶԸ�ͨ��ϵͳ�IJ������е���������Ӧ��ͬ�Ļ�����
�ؼ��ʣ�
���ƶ��������������ƶ�������ͨ��ϵͳ��ֱ��ͨ�����ƶ���������
��ͼ����ţ�TP393 ���ױ�־�룺A ���±�ţ�1672-7207(2010)04-1442-07
Multi-mobile robots communication system for mobile robot of central south-��
REN Xiao-ping1, CAI Zi-xing1, ZOU Lei1, KUANG Lin-ai1, 2
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. College of Information and Engineering, Xiangtan University, Xiangtan 411105, China)
Abstract: In order to improve the compatibility of current communication system, a principle for the design of multi-mobile robots communication system was presented. MORCS-�� (Mobile robot of central south-��) multi-mobile robots used explicit communication method, communication network was based on Ad Hoc network, communication protocol based on cluster was proposed and the prototype of the system was developed in the Windows XP operate system, which brought about some compatibility. The results show that the reconfiguration time of cluster structure is about 1 s, the time that one robot is away from a team can be detected in about 1 s, the time of finding transport path is about 1 s. Besides, the parameters can be modified so that the system is adequate to different environments.
Key words: multi-mobile robots; mobile robot of central south-��; communication system; explicit communication; Ad Hoc network
���Ż����˼����ķ�չ��������ĸ��ӻ�������������ִ�������ȱ��Խ��Խ���ԣ���Щ������ڵ�����������˵��ʮ�����ѻ�������ɵ�[1]��������˷ֲ�ʽ��ҵ�Ѿ���Ϊһ�����ơ������������ִ������ʱ��������Ҫͨ����Ϣ���������ж�����˼��ͬ����Э��[2]��Ŀǰ�������˼�Ľ�����ʽ�ɷ�Ϊ3 ��[3-4]��ͨ�Ž�������֪�����ͻ������������Ŷ��ƶ�������ϵͳ�о��IJ������룬���˾����CEBOT[5]��ACTRESS[6]��SWARM[7]��GOFER[8]��ALLIANCE[9]ϵͳ��Ŀǰ��ӿ�ֳ��µĶ��ƶ�������ϵͳƽ̨����Cougaar[10-11]��CoCoA[12]��MinDART[13]��CWMRP[14]�ȡ�Cougaar�ֲ�ʽϵͳ��������С�������豸�ϣ�ͨ�����ô��ģ�ľ���³���Եķֲ�ʽӦ�ó����γ�����������[15]�������ʵʱ�Ļ����˿��ƺͼ�������CoCoA[12]��һ�ֻ���Ad Hoc����Ķ������Э����λϵͳ��������֮����RF�źŵ�(Radio frequency beacon)���л���ͨ�źͶ�λ��RF�źŵ�ͨ��IEEE802.11�����������й�����CoCoA���Ե���RF�źŵ��Լ��ٻ������ڶ�λʱ��������ġ�MinDART[13]�������ϵͳͬ����һ���źŵ���Ϊͨ�ŵ�ý�顣CWMRP[14]�������ϵͳ���ô�������Ϣ�����ƶ�ͨ�����磬ͨ��һ���㲥Э�����ͨ�ţ��ڴ˻����ϣ����л����˶�λ�Ϳ����㷨���о���Ŀǰ������Ҳ�㷺��չ�˶��ƶ�������ͨ��ϵͳ���о������ε�[16]���û���Linux�ļ��п���ʽͨ�Ż��ƣ���������֮���Դ��(Pack)�ķ�ʽ����״̬��Ϣ��ͬʱ���������������˴�������Ϣ������ϼ��[17]����Ķ������ͨ��ϵͳ����11 Mbit/s����Hub������վ�������������˻������߾�������ͨ��ƽ̨��Ϊ�����������ͨѶ�����壬��������˶�����˺��������ӵ����顣����������ͨ��ϵͳ������������ϵ�ṹ������о��������˽϶�Ļ���ͨ�������ʵ���о��������Ը�����ʽ�Ķ�����˽��������˹㷺���о������ڶ������ͨ��ϵͳ���ǻ������߾������ģ�������е��о�Ҳ��Ϊ���ڴˣ����������ڵ�һ����������ƶ�������ͨ��ϵͳ��Ҫ���ǵļ���������ء�
1 ���ƶ�������ͨ��ϵͳ���ԭ��
Ŀǰ���ڼ���������й㷺Ӧ�õ�������·�����䷽ʽ��ͨ��Э���Ϊ���ƶ�������ϵͳ��ͨ���ṩ�˻����Ľ��������Ȼ�������ƶ�������ϵͳͨ����ʵʱ�ԡ��ɿ��Եȷ���������Ҫ����������ڶ��ƶ�������ϵͳ�ֲ�ʽ���ƽṹ��ͨ�Ż��Ƶ��о�������Ҫ���塣���һ�����ƶ�������ͨ��ϵͳ��Ҫ���ǵ������ж��ƶ�������ͨ�ŷ�ʽ�����ƶ�������ͨ���������˽ṹ�Ͷ��ƶ�������ͨ��Э��ȡ�
1.1 ���ƶ�������ͨ�ŷ�ʽ
ͨ���ǻ�����֮����н�������֯�Ļ�������ͨ�ŶԶ������ϵͳ��������ִ�е�Ӱ�췽�棬�ѽ����˴������о���Balch��Arkinͨ��ʵ��ó�����ʹ��������ͨ��Ҳ���Դ������ϵͳ����[18]��
Ŀǰ�����ƶ���������Ҫ��ͨ�ŷ�ʽ��ֱ��ͨ�ţ���ͨ��ij�ֹ��еĹ���ͷ�ʽʵ���ض�������Ϣ�Ĵ��ݡ�ֱ��ͨ��Ҫ���ͺͽ�����Ϣʱ�ܱ���һ���ԣ���ˣ��ڻ�����֮�����Ҫһ��ͨѶЭ�顣����ͨ�ŷ�ʽ���Կ��١���Ч����ɸ������˼���Ϣ��ת�ƺͽ�����ʵ������������ͨ�ŷ�ʽ������ɵĸ�Э��Э�����ԡ�
�������ƶ����š����ƶ��������Ŷӵ���Ҫ��������δ֪�����н��ж������Э����ͼ̽�⣬������֮������ݽ������ϴ����ԣ�����ֱ��ͨ�ŷ�ʽ��
1.2 ���ƶ�������ͨ�����˽ṹ
���ƶ�������֮����ֱ��ͨ��ʱ����һ��С�͵�ͨ�����硣�������Ͻ������ƶ�������ͨ�ž���һ��Զ�㡢���Զ���ͨ�š�����ƶ��Ļ����������һ�����߾�����(WLAN��Wireless local area network) ��Ŀǰ����������ڽ��WLAN�Ķ��ƶ�������ϵͳ����ȡ����һ���ijɹ��������ڶ��ƶ�������ͨ��ϵͳ�������С�����ĵ͡����ƶ��Լ���̬�������ص㣬���ԣ�Ҫ��һ���WLANͨ��ϵͳӦ�õ���������ʱ������һ���Ѷ�[19]�����⣬��ͳ������ͨ��ϵͳ��Ҫһ����������ʩ֧�֣����ڲ�ȷ���ġ����ӵĻ�����ij��ϣ�����ʱ����Ч�ز���չ��[20]��Ŀǰ���н϶���ƶ�������ͨ��ϵͳ��Ad Hoc��ʽ�齨��ͨ������[21-22]��
1.3 ���ƶ�������ͨ��Э��
1.3.1 �����·��Э��
�ڻ���Ad Hoc�Ķ��ƶ�������ͨ�������У�������һ����������صĿ��Ƴ�����һ������Ϊ·����������ص�·��Э�飬����·�ɷ��֡�·��ά�������Խ��յ���Ŀ�ĵط���������Ϣ����ת�����ƶ�������֮���ӻ����˵�����Ա֮�����Ϣ������Ҫͨ��Э������ɡ����ִ��䲻��Ҫ���Ŀ��ƣ������ڻ����˵��ƶ����ԣ�·��Э����Ҫ������̬�仯���������ˡ����ƶ�������ͨ������Э����о�����������������㡣
ͼ1��ʾΪ�������ͨ�����磬MORCS-2���ƶ���������Ad Hoc��ʽ�齨ͨ�����硣�������ͨ��ϵͳ����������㣬ͨ���ػ�ײ�����ݰ����ж����ݰ�����Դ�ͷ������ݰ���Ŀ�ĵ�ַ���������ٶ��������Ӧ�Ĵ��������������ա����������´��ת�����ݰ����齨�ּ��ṹ���˽�������ͨ�����������״���ȡ�ͼ2��ʾΪ�ö��ƶ�������ͨ��ϵͳ����ϵ�ṹʾ��ͼ��
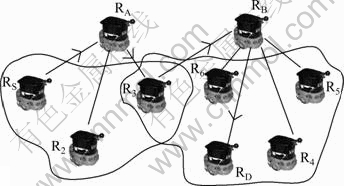
ͼ1 �������ͨ������
Fig.1 Multi-robot communication network
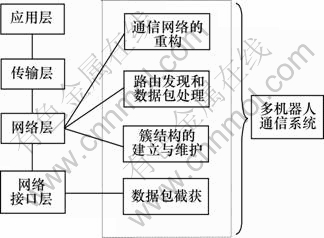
ͼ2 ͨ��ϵͳ��ϵ�ṹ
Fig.2 Structure of communication system
��ͨ�������У��������˽϶�ʱ��ÿ��������Ҫά���������ھӻ�������Ϣ����������Ч�ʺ�ͨ�������ϲ����Ҫһ���ּ������������ڶ�Ļ�����[2]�����и��ӵĿ��ơ���֯����[23]��
1.3.2 Ӧ�ò㴫��Э��
TCP(Transmission control protocol)Э��ͨ�ŵ��ص����������ӣ����пɿ���ͨ��������Ŀǰ�����ƶ�������ʵʱͨ��ϵͳ�ж���TCPЭ�������պͷ��ͻ�����֮��ĶԻ���Ϣ���������Ա�֤ϵͳ���ȶ��ԺͿɿ��ԡ���Тƽ��[24]�Ƚ���TCP�����µ�3��Ad Hoc·��Э������ܡ�
����TCPЭ���ͨ�����������������ϵͳʵʱ��Ϊ���۵ģ������ﲻ��Ԥ�ڵ�Ч�����෴��UDP(User datagram protocol)Э��ͨ�ŵ��ص��������ӡ��㲥ʽͨ�š�ͨ�����ʸߣ���Ȼû�в�����ơ���ʱ�ط���ӵ�����Ƶȿɿ��Ա�֤���ԣ������Ա�֤ϵͳ��ʵʱ�ԡ���ˣ������������Ϻõ�����£�UDPЭ����Ȼ����Ҫѡ��
2 ���ƶ�������ͨ��ϵͳ
Ŀǰ�������о���Ա������������������ϵ�ṹ������о���������������ض�ƽ̨���Ƶ�ϵͳ��Ӧ�ó����ǣ�û��������ܵ�ͳһ������ˣ������˴������ظ�����[25]�����ݶ��ƶ�������ͨ��������ص㣬�������ͨ��ϵͳӦ����Ad Hocͨ��ϵͳ������ֱ��ͨ�ŵķ�ʽ��ͨ��ϵͳ�����Ӧ����ֲ�ʽ���ص㣬����һ����ͨ���ԣ��ɿ��ٵ��ڻ������ϰ�װ���𣬽����Ͽ���γɶ������ͨ�����磬����ɻ����˿��ơ��Ŷ�Э��������
ͼ3��ʾΪ����������ƵĶ��ƶ�������ͨ��ϵͳ(ͨ��ϵͳ����ϵ�ṹ��ͼ2��ʾ)��ͨ��ϵͳ��ԭ��������[2]��ͨ��ϵͳ����·�ɱ�����ʾ��������״̬��ʾ���ھӻ�����״̬�Լ�ʵ�����ݼ�¼4���֡�ÿ����ʾ��������ص��߳̽��п��ơ�ϵͳ��ʾ��Ҫ���߳����1��ʾ��
2.1 ·�ɱ���ʾ
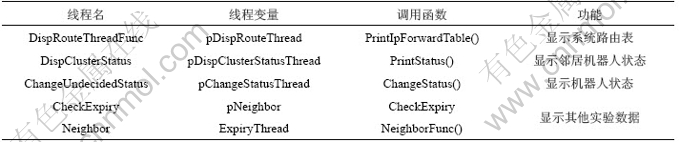
������·�ɱ���ʾ��ͨ��DispRouteThreadFunc�߳�����ɵġ�DispRouteThreadFunc�̵߳���PrintIpForwardTable( )������������������ʾϵͳ�ĺ���·�ɱ���
���ƶ�������ͨ��ϵͳ���Զ�̬�ظ���ϵͳ·�ɣ��������������˽�����ͨ����·����ͨ��ʱ������UpdateSystemRoutingTable( )������ϵͳ·�ɱ����и��¡����ڶ��ƶ�������ͨ������������Ƕ�̬�仯�ģ�ÿ��·�ɶ���һ��������ʱ�䣬CheckActiveRouteLifetime( )�������ڼ��·�ɵ�����ʱ��(Lifetime)�Ƿ���ڣ����Ѿ����ڣ�����Ľ����ϵ���ʾ״̬��
2.2 ������״̬���ھӻ�����״̬��ʾ
ͨ��ϵͳ�����й����У���һЩ��ʾ��Ϣ��Ҫ��ʾ�����磺Э������������������ǰ�Ľ�ɫ������ͷ�ڵ�ͱ����ھ�������ⶼ��Ҫһ���̶߳����ؽ�����ʾ�����̼߳�ΪDispClusterStatus����ͨ������PrintStatus()������ʵ�֡�
������״̬��ʾ������ʵʱ����ʾ��ǰ����������״̬��������ϵͳ���е�һЩ��Ϣ�������˵�ǰ��״̬(��ͷ����Ա��δ��״̬[2])�������������Ŷ��Լ���ǰ�ھӻ����˵ĸ����ȡ�������״̬���ݽṹ��ͼ4��ʾ��������ÿ��һ��ʱ��t����Χ�����˹㲥ʶ����Ϣ��֪ͨ��Χ�ھӻ������Լ��Ĵ��ڡ�Ϊ�˼�¼ÿ���������������ھӣ�����һ���ھӻ����˱������ݽṹ��ͼ5��ʾ��
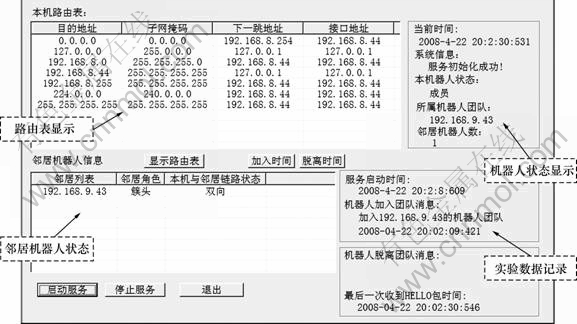
ͼ3 ���ƶ�������ͨ��ϵͳ����
Fig.3 System interface of multi-mobile robots communication system
��1 ϵͳ��ʾ��Ҫ�߳�
Table 1 Main threads for system display

ͼ4 ������״̬���ݽṹ
Fig.4 Data structure of status of robot
�ھӻ����˱�����Ϣ����һ������ʱ������ڹ���ʱ��t��û���յ��Ǽǻ����˷��͵�ʶ�������ɾ���û����˵ļ�¼����ֻ��ƿ��Ա�֤��������������Χ�����н������ĸ�֪�ȡ�ʱ������Ϊ
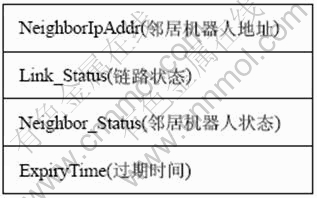
ͼ5 �ھӻ����˱����ݽṹ
Fig.5 Data structure of robot��s neighbor table
t=(HELLO_LOSS+1)��HELLO_INTERVAL�����У�HELLO_LOSS��������ʧ��HELLO��Ϣ����Ŀ��HELLO_INTERVALΪʱ�䳣������1�������˽ڵ㸽���������ȶ�ʱ���û����˽ڵ���ھӱ����������Ƶ�������˫�������·�����е����Ϣ��
����Ҫ��ʾ������״̬���ھӻ����˵�״̬����Ҫ��ȡ���������̵߳ı�������ϵͳ���ھ������ȡ�2���߳�Ҫ��ȡͬһ������������Ҫ��ϵͳ�ھ������ӻ�����pNeighborListLock���Է�ֹ����ͬһ������ʱ����ϵͳ������
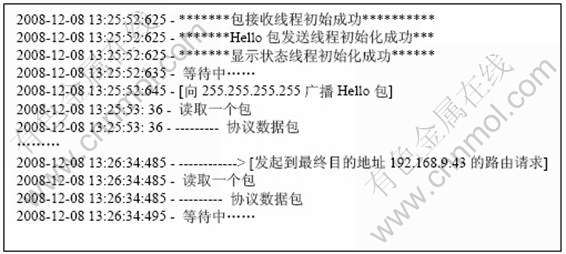
ͼ6 ͨ��ϵͳ��־
Fig.6 System log of communication system
2.3 ʵ�����ݼ�¼
�ڽ��ж��ƶ�������ͨ��ʵ��ʱ����Ҫ��¼��ص�ʵ�����ݣ����˲�����־��¼�⣬��ϵͳ������������һЩ��ص�ʵ����Ϣ��
��־��¼�Ǹ�ͨ��ϵͳʮ����Ҫ��һ���֣��Գ���ĵ����Լ����ڹ۲�ͨ��Э��������нϴ�İ��������ȣ���ʼ��1����ΪCBRP.log����־�ļ���Ȼ���ʼ������־����pLoggingLock������Ҫ���м�¼ʱ������־�ļ����м���������Ȼ����LogMessage (char *pPrintStr)������¼��־��
ÿ��������ʱ���ڼ����С������������˷���������Ϣ���յ���Ϣ�����ʶ���д��������ǷDZ�������Ϣ������д����������Ӧ��ת�������ݰ��Ľػ�ԭ��������[25]������1���յ�1�������˵�ʶ����Ϣʱ�������˼���1���ؽṹ������������ؽṹʱ��������Ӧ�ļ�¼���Ӷ����Ը��ݼ�¼��������ͨ��ϵͳ�����ܡ�ͼ6��ʾ�ǽ�ȡ��һ����־��¼��
3 ���ڶ��ƶ��������Ŷӵ�ʵ��
���ƶ��������Ŷӿ����ڻ�����ء�������ͼ̽�����;��Ŀǰ�������ƶ����Ŷ�������Ŷ��Ѿ���չ�����о������ͼ��̽���֪[26-27]�������� ��[2]�����������ϵ�ṹ[28]�Ϳ��Ʒ���[18]�ȡ�
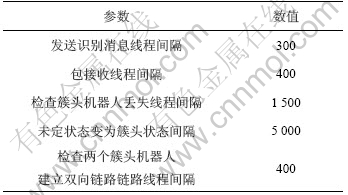
ÿ̨�����˰�װWindows XP����ϵͳ�������䱸��TP-LINK��˾��TL-WN322G������������2��ʾΪͨ��ϵͳ�ĵ��Ͳ������á���ʵ���У����ķ���ʶ����Ϣ�̼߳��ʱ�������˷���ʶ����Ϣ�Ĵ��������ӣ������������绷�����õ���������ӻ����˻���ʶ������������ǣ�Ҳ���ܸ��������ӵ�µĽ��������Ҫ���ݻ������е��ڡ�
��2 ͨ��ƽ̨��������
Table 2 Parameter setting of communication platform ms
ʵ���������ͨ��ϵͳ�������õ�ʵ���ԡ��ؽṹ���ع�ʱ��Լ1 s���������ŶӼ��û����������Ŷӵ�ʱ��Լ1 s��Ѱ�Ҵ���·����ʱ��С��1 s����Ȼ��ʵ�黷����ʵ�����нϴ��Ӱ�졣����ʵ�鶼�������ڻ�������ɵģ����ڻ����������źŴ����Ӱ��ϴ���ʵ������д����źŲ��ȶ�������
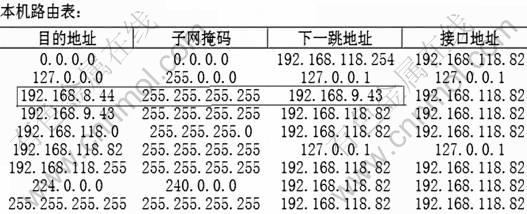
ͼ7��ʾΪ����192.168.8.44����һ̨������192.168.9.43����1��ͨ����·��ʾ��ͼ��ͼ8��ʾΪ�м�����˽ڵ����ת����ʵ��ʾ��ͼ����ͼ8�У�ϵͳ·�ɱ���ʾ������192.168.118.82���յ��ַ192.168.8.44��ͨ��192.168.9.43�����˽�������ת������ɵġ�ʵ��������������ϰ�(15.3 m)Ѱ�Ҵ���·����ʱ��ԼΪ1 s��
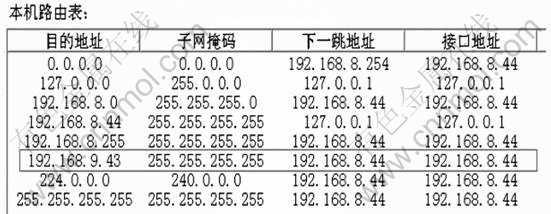
ͼ7 2̨�����˽���ͨ����·ʾ��ͼ
Fig.7 Communication link between two robots
ͼ8 �м�����˽ڵ����ת����ʵ��ͼ
Fig.8 Transmitting data through middle robot
4 ����
��1���ڶ��ƶ��������Ŷ��У��ؽṹ���ع�ʱ��Լ1 s���������ŶӼ��û����������Ŷӵ�ʱ��Լ1 s��Ѱ�Ҵ���·����ʱ��С��1 s��
��2��ͨ��ƽ̨�IJ������Ե���������ʱ����ղ��������˷��͵�ʶ����Ϣ���ɵ�������ʶ����Ϣ�̼߳�������ֲ����ɵ��ķ�ʽ��ͨ��ϵͳ������һ��������ԡ�
�ο����ף�
[1] ����, ����ǿ, ����Ȩ. ���ƶ�������ͨ�ż�������[J]. �й��Ƽ���Ϣ, 2008(5): 112-114.
SUN Liang, ZHANG Yong-qiang, QIAO Shi-quan. Summary of multi-robot communication[J]. China Science and Technology Information, 2008(5): 112-114.
[2] ��Тƽ, ������, �°���. ���ƶ�������ͨ��ϵͳ�о���չ[J]. ���������, 2010, 25(3): 327-332
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. Current research in multi-mobile robots communication system[J]. Control and Decision, 2010, 25(3): 327-332
[3] Tucker B. Communication, diversity and learning: Cornerstones of swarm behavior[C]//International Workshop on Swarm Robotics. Berlin: Springer, 2005, 3342: 21-30.
[4] Cao Y U, Fukunaga A S, Kahng A. Cooperative mobile robotics: antecedents and directions[J]. Autonomous Robots, 1997, 4(1): 1-23.
[5] Fukuda T, Kawauchi Y, Asama H. Analysis and evaluation of cellular robotics as a distributed intelligent system by communication amount[C]//Proceedings of IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 827-834.
[6] Matsumoto A, Asama H, Ishida Y, et al. Communication in the autonomous and decentralized robot system: ACTRESS[C]// Proceedings IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 835-840.
[7] Jin K, Liang P, Beni G. Stability of synchronized distributed control of discrete swarm structures[C]//Proceedings of IEEE International Conference on Robotics and Automation. New York: Haworth Press, 1994: 1033-1038.
[8] Caloud P, Choi W, Latombe J C. Indoor automation with many mobile robots[C]//Proceedings of IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 67-72.
[9] Parker L E. Alliance: An architecture for fault tolerant, cooperative control of heterogeneous mobile robots[C]// Proceedings of the 1994 IEEE International Conference on Intelligent Robots and Systems. New York: Haworth Press, 1994: 776-783.
[10] Helsinger A, Thome M, Wright T. Cougaar: A scalable, distributed multi-agent architecture[C]//2004 IEEE International Conference on Systems, Man and Cybernetics. Netherlands: IEEE, 2004: 1910-1917.
[11] John Z, Richard S, Sarah S. Experience with dynamic crosscutting in cougaar[C]//Proceedings of the 2007 OTM Confederated International Conference on the Move to Meaningful Internet Systems: CoopIS, DOA, ODBASE, GADA, and IS. Berlin: Springer, 2007: 595-612.
[12] Koutsonikolas D, Das S M, Hu Y C. CoCoA: Coordinated cooperative localization for mobile multi-robot ad hoc networks[J]. Ad Hoc and Sensor Wireless Networks Journal, 2007, 3(4): 331-352.
[13] Paul E R, Amy L, Harini V, et al. Performance evaluation of a multi-robot search & retrieval system: Experiences with mindart[J]. Journal of Intelligent and Robotic Systems, 2008, 52(4): 363-387.
[14] Aveek D, John S, Vijay K. Ad hoc networks for localization and control[C]//Proceedings of the 41st IEEE Conference on Decision and Control. New York: Haworth Press, 2002: 2978-2983.
[15] ����, ����. ��������Ad Hoc����Ķ��ƶ�������ϵͳ[J]. �����ʵ�ѧԺѧ��:��Ȼ��ѧ��, 2006, 18(S1): 143-144.
JIN Yang, ZHANG Yi. Multi mobile robots system based on wireless ad hoc network[J]. Journal of Chongqing University of Posts and Telecommunications: Natural Science Edition, 2006, 18(S1): 143-144.
[16] ����, ���ĺ�, ������. ����Linux�Ķ��ƶ�������ͨ�ŵ�ԭ����ʵ�ַ���[J]. �繤������־, 2003(12): 73-75.
WU Tao, HUANG Xin-han, HUANG Zhen-yu. The communication theory and realization of multi-mobile robots based on Linux[J]. Electric Engineering, 2003(12): 73-75.
[17] ����ϼ, �����, ΤΡ. ����WLAN�Ķ�����˷ֲ�ʽ����ϵͳ�о�[J]. ���繤��, 2006, 23(5): 32-36.
WU Gen-xia, LI Guo-yang, WEI Wei. Study on WLAN-based distributed cooperation for multi-robot system[J]. Mechanical & Electrical Engineering Magazine, 2006, 23(5): 32-36.
[18] Balch T, Arkin R C. Communication in reactive multi agent robotic systems[J]. Autonomous Robots, 1994, 1(1): 27-52.
[19] ¬ޱޱ, ������, ��־ǿ, ��. ����DFA����ʽAgentģ�͵������ʵ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2010, 41(2): 600-608.
LU Wei-wei, CAI Zi-xing, WEN Zhi-qiang, et al. Design and implementation of complex Agent model using DFA[J]. Journal of Central South University: Science and Technology, 2010, 41(2): 600-608.
[20] ��Тƽ, ������, �°���. һ���ƶ������������Dz���[J]. ���������, 2008, 34(2): 159-162.
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. A region partition tactics for ad hoc network[J]. Computer Engineering, 2008, 34(2): 159-162.
[21] Akkaya K, Janapala S. Maximizing connected coverage via controlled actor relocation in wireless sensor and actor networks[J]. Computer Networks: The International Journal of Computer and Telecommunications Networking, 2008, 52(14): 2779-2796.
[22] Ogren P, Fiorelli E, Leonard N E. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment[J]. IEEE Transactions on Automatic Control, 2004, 49(8): 1292-1302.
[23] CHEN Ai-bin, CAI Zi-xing. Clustering in mobile ad hoc networks based on neural network[J]. Journal of Central South University of Technology, 2006, 13(6): 699-702.
[24] ��Тƽ, ������, �°���. ����TCP������ƶ�������·��Э�����ܷ���[J]. �������ѧ, 2008, 35(4): 74-77.
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. Performance analysis of routing protocol for ad hoc network under TCP transmission[J]. Computer Science, 2008, 35(4): 74-77.
[25] ������, ��Тƽ, ����, ��. һ�ִؽṹ�µĶ��ƶ�������ͨ�ŷ���[J]. С���ͼ����ϵͳ, 2010, 3(3): 553-556.
CAI Zi-xing, REN Xiao-ping, ZOU Lei, et al. Communication method under cluster structure for multi-mobile robots[J]. Journal of Chinese Computer Systems, 2010, 3(3): 553-556.
[26] CHEN Bai-fan, CAI Zi-xing, HU De-wen. Approach of simultaneous localization and mapping based on local maps for robot[J]. Journal of Central South University of Technology, 2006, 13(6): 713-716.
[27] ����ΰ, ������, ͯ��. ����ATM�������խ����̽�⾫�ȵĸĽ�����[J]. ����ϵͳѧ��, 2008, 3(4): 481-486.
LI Run-wei, CAI Zi-xing, TONG Yu. Improving the accuracy of exploring the narrow environment by using ATM[J]. CAAL Transactions on Intelligent Systems, 2008, 3(4): 481-486.
[28] ���氲, ������, ���쳿. ����ֲ�ʽ���������ϵ�ṹ[J]. С���ͼ����ϵͳ, 2008, 29(7): 1263-1267.
CUI Yi-an, CAI Zi-xing, LI Xiao-chen. Self configurable and layered architecture of multi-robot[J]. Journal of Chinese Computer Systems, 2008, 29(7): 1263-1267.
�ո����ڣ�2009-08-17�������ڣ�2009-11-20
������Ŀ��������Ȼ��ѧ�����ش�ר��������Ŀ(90820302)��������Ȼ��ѧ��������������Ŀ(60805027)�����Ҳ�ʿ�����������Ŀ(200805330005)
ͨ�����ߣ���Тƽ(1984-)���У�ɽ��ƽң�ˣ���ʿ�о��������¶������ϵͳ����������ͨ�ŵ��о����绰��0731-82655993��E-mail: xiaopingren@gmail.com
(�༭ ����ɭ)
