
һ�ֻ���Э������Ƶľ�ֵƫ�ƶ�������㷨
Ф��ʤ�������������橣�����
(�人��ѧ ������ϢѧԺ������ �人��430079)
ժ Ҫ��
������㷨��Ŀ���С����״�仯����Ӧ�����ϲ�Ҳ��ܶ�Ŀ�����ת���и��ٵ����⣬���һ�ָĽ���Ŀ������㷨�����㷨�Ǿ�ֵƫ���㷨�Ľ�һ����չ�����죬�ڹ���Ŀ��λ�õ�ͬʱ��Э�������������Ŀ����״�����ɫ��ֱ��ͼ����������ĽǶȺ���״����С�����仯ʱ�ĸ������⡣ʵ�����������Ľ����㷨�ڲ�ͬ�����¸���Ŀ���³���Ժܺã����������˸��پ��ȣ����к�ǿ��ʵ���ԡ�
�ؼ��ʣ�
��ֵƫ����Э��������������������ɫֱ��ͼ��
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2013)03-1049-05
A mean shift object tracking algorithm based on covariance estimation
XIAO Jinsheng, ZHANG Yaqi, SHAN Shanshan, PENG Hong
(School of Electronic Information, Wuhan University, Wuhan 430079, China)
Abstract: Considering the problems that the current tracking algorithms always fail in the adaption of object��s changing in size and shape and cannot follow when the object rotating, an improved object tracking algorithm was proposed which was an extension of the mean shift procedure. The new algorithm utilizes a covariance matrix to describe the object��s shape while estimating its position, combines with the color histogram, and processes the tracking problem while the target object keeps changing in angle, size or shape. The experiment shows that algorithm can robustly work in different environment and greatly raise the tracking accuracy.
Key words: mean shift; covariance matrix; object tracking; color histogram
�˶�Ŀ��ļ��������������������Ź㷺��Ӧ�ã��Ǽ�����Ӿ��о�����Ľ���֮һ����ֵƫ���㷨��������м�³�����ص㣬�������ܵ��㷺��ע���������������������ģʽƥ����ŵ㱻�㷺Ӧ�õ�Ŀ����������㷨�ر��ڷǸ�������������кܺõ�ʵʱ�ԡ���ֵƫ���㷨���Ժܺõؽ�����ٵĿ��ӻ�����[1-2]�����ø����������������Եõ����Ƹ����ܶȺ����ĺ�[3]������ֵƫ���㷨��Ϊһ��������������ܶȺ������ֵ�Ĺ���[4]�������ھ�ֵƫ���㷨���������һ�ֻ���Э������Ƶĸ����㷨[5]�����ٵķǸ���������һ����Բ�ε���״�궨����Ŀ��ģ�͵���ɫֱ��ͼ������ͼ��������ģ�͵ĺ�ѡ��Բ�������ɫֱ��ͼ����һ�����ƶȺ������ھ�ֵƫ�ƹ�����Ѱ��������¶���ͼ����Ŀ��ģ�����ƶ����[6-7]���������ٶ������״����С�����仯ʱ����ε�����Բ��״���ӽ��ö����������Ȼû�н��[8]�����еĽ�������ǣ���ÿ�����ٲ����ͨ������Բ�ηŴ�10%����С10%����ѡ�����ƥ��[6]��������Բ�εij߶ȷ�Χ�ڽ��й㷺������ֱ���ҵ��������һ��Ϊֹ[9]���ȵȡ���Ȼ����Щ�������������࣬���һ�Ҫ���ж�������Ƚϣ����㸴�ӶȽϴ��ĶԾ�ֵƫ���㷨������չ�����㷨����ֻ����Ŀ���λ�ã���ͬʱ���ƺ�����Ŀ�����״�仯���ɼ���Э����������õ��˶�Ŀ�����ת�ͳ߶ȱ仯�����һ�����ɶ�Ϊ5�Ļ�����ɫֱ��ͼ��Ŀ����ٷ������������Ƹ��ٶ����λ�ã����ҹ��ƽ��Ƹö������Բ����״�����㷨����Ч�ؽ����Բ��Ӧ����ص����⡣
1 ��ֵƫ���㷨ԭ��
�ȼ����������ݼ��� �������ܶȺ���
�������ܶȺ��� Ϊ��˹�ֲ���������ʾ��
Ϊ��˹�ֲ���������ʾ��
 (1)
(1)
ƽ������ ��Э�������V�������Ȼ���Ƽ���ʹ���ϸ���
��Э�������V�������Ȼ���Ƽ���ʹ���ϸ��� �ﵽ���ʱ��ֵ�����ڸ�˹�ֲ�p����ʧһ���ԣ������Ŀ�꺯������д��������ʽ[10]��
�ﵽ���ʱ��ֵ�����ڸ�˹�ֲ�p����ʧһ���ԣ������Ŀ�꺯������д��������ʽ[10]��
 (2)
(2)
��V�̶�ʱ��ʽ(2)����Ϊ�ø�˹�ں�ģ��ľ����ܶȺ���������V���Կ����ǻ����ں��ܶȹ����еĴ�����������ֵƫ���㷨��������ȡ�����ܶȺ���ģ�Ͳ�����³������[11-13]��ʽ(2)���ü�Ȩϵ�������ı�ʾ���£�
 (3)
(3)
������EM������[14]���ʹʽ(3)�ﵽ���ֵ�IJ�����V���ٶ���ǰ���Ʋ���ֵΪ ��
�� ���µ�EM�㷨����1��2ѭ���������£�ֱ��Ŀ�꺯������Ϊֹ��
���µ�EM�㷨����1��2ѭ���������£�ֱ��Ŀ�꺯������Ϊֹ��
����1��������Ϊ�������� ʹ��eΪ�Ķ�����Ȼ����
ʹ��eΪ�Ķ�����Ȼ���� �ﵽ�����Jensen����ʽ[10]���У�
�ﵽ�����Jensen����ʽ[10]���У�
 (4)
(4)
���� ��
�� ��
��
������ʽ�Ҷ˷ֱ����ƫ����������Ϊ0�ã�
 ��i=1, ��, N (5)
��i=1, ��, N (5)
ע����ɵã�
 (6)
(6)
����2������Ϊ������ѡ��ʹĿ�꺯�� �����ʽ(4)ֻ�����
�����ʽ(4)ֻ����� �ļ���ֵ��ע���˹�ֲ��Ķ��壬�������ƫ����������Ϊ0�ã�
�ļ���ֵ��ע���˹�ֲ��Ķ��壬�������ƫ����������Ϊ0�ã�
 (7)
(7)
����ʽ(6)���ɵõ���ʽ��
 (8)
(8)
��ʽ(8)��֪����λ�ý��й��Ƶõ��ĸ��µ�ʽ���˹�ں˾�ֵƫ�Ƶĸ���ʽ��ȡ�
2 �Ľ��ľ�ֵƫ���㷨������
2.1 ������ɫ�ֲ�ֱ��ͼ�ĸ���
��ʼʱ��Ŀ�����ֶ����������㷨���Ϊ��ԲO����xi��ʾ��ԲO���������ص��λ�ã��� ��ʾ��ʼʱ��ԲĿ��������ͼ���е�λ�ã��ö��ؽ���ȷ��Ŀ�����״��
��ʾ��ʼʱ��ԲĿ��������ͼ���е�λ�ã��ö��ؽ���ȷ��Ŀ�����״��
 (9)
(9)
��ɫ�ֲ�ֱ��ͼ����Ŀ����۵Ľ�ģ������ɫ�ֲ�ֱ��ͼ��M�����䣬�亯�� : R2��1, ��, Mȷ����ǰ��xi������ɫֵ����M��ֱ��ͼ��ֵ��������ʽ����õ���
: R2��1, ��, Mȷ����ǰ��xi������ɫֵ����M��ֱ��ͼ��ֵ��������ʽ����õ���
 (10)
(10)
���У� Ϊ�����ڿ˺������ø�˹�˺���N����Ŀ���м䲿�ֵ��Ȩ�أ�ʹĿ����ص��Ȩ�ؽ��ͣ����ٶ���Բ�߽����ص������������ֻȡ����Χ���������о�����IJ�����
Ϊ�����ڿ˺������ø�˹�˺���N����Ŀ���м䲿�ֵ��Ȩ�أ�ʹĿ����ص��Ȩ�ؽ��ͣ����ٶ���Բ�߽����ص������������ֻȡ����Χ���������о�����IJ����� ��
�� �����ص㡣
�����ص㡣
��ͼƬ�ж���1����Բ��������ʾ����λ�ã�Э�������V��ʾ������״������ɫֱ��ͼ ����������������Σ����ҵ�m���������㹫ʽ���£�
����������������Σ����ҵ�m���������㹫ʽ���£�
 (11)
(11)
������������������ƶȶ���Ϊ����ֱ��ͼ�����ƶȡ���ͬ����[1]���ᵽ���ð���ϵ������������ֱ��ͼ�����ƶȣ�
 (12)
(12)
�ڵ�ǰ������ ������һ��̩�ս���ֵ�������£�
������һ��̩�ս���ֵ�������£�
 (13)
(13)
���У�c1��c2Ϊ�������ӡ�
 (14)
(14)
��Ϊʽ(13)�е�ĩ���ʽ(2)�е�һ�������ԣ������µ�EM �㷨Ѱ�����ƶȺ����ľֲ����Ž⡣
2.2 ����Э���������µĸ����㷨
һ��ľ�ֵƫ���㷨��û�п���Э�������V�ĸ��£���Э�������V�����ų߶Ⱥͷ�λ�ı仯[15].��� ���������ݳ�ʼ�ķֲ�����ô��ʽ(2)������ֵΪ��
���������ݳ�ʼ�ķֲ�����ô��ʽ(2)������ֵΪ��
 (15)
(15)
ͬ�������Ǹ�˹�ֲ����壬��Э�������Vʹ �ﵽ��������V��ƫ����Ϊ0�ɵã�
�ﵽ��������V��ƫ����Ϊ0�ɵã�
 (16)
(16)
���ԣ�V�ĵ������·������£�
 (17)
(17)
������ķ�����֪��������������ģ��o�����ij�ʼ(k=0)λ������״ �������ʼĿ��������ɫֱ��ͼ
�������ʼĿ��������ɫֱ��ͼ �������㷨�������£�
�������㷨�������£�
(1) ���㵱ǰ֡���������ɫֱ��ͼ��ֵ ��
��
(2) ����Ȩ�� ��qi��
��qi��
(3) �����µ�Ԥ��λ�� ��
��
(4) �����µķ��� ��
��
(5) �����µ���Բ����û�б仯ʱ��ֹͣ��������������k��k+1��ת����1�������¼��㡣
�ù���ÿ1֡ѭ��1�Ρ����������£�ֱ����ǰһ֡����Բ�����λ�ú���״��ֵ����Ϊ�µ�֡����Բ����ij�ʼֵ��
3 ʵ����������
Ϊ���Ա�������㷨����Ч�ԣ�ѡȡ���д����Եı�������Ƶ�����������ʵ�飬���뾭���ֵƫ���㷨�ó��������ٶ������Ч�����жԱȡ���ʵ������У�ʹ�õ���������ΪMATLAB 7.12.0.635������ϵͳΪWindows XP��Ӳ��ƽ̨Ϊ��Inter(R) Core(TM)i5-2300 CPU@2.80 GHz��2.79 GHz��4.00 GB�ڴ档
��Ա����н��и���ʵ�飬�����㷨�뾭���ֵƫ���㷨��������Ч�ʶԱȽ������1�����Բ��ö������ȡƽ��ʱ��ķ�����
�ɱ�1��֪����ʹ����Э�������ĸ��¼��㣬����������㷨��Ȼ�ȴ�ͳ�ľ�ֵƫ���㷨���и��ߵ�ʱ������Ч�ʣ������ٶ�ƽ���Ǵ�ͳ�㷨��2����
ͼ1��ʾΪ�����㷨�뾭���ֵƫ���㷨�ĸ���Ч���Աȡ����������λ�ú���״�������Բ�߿��ʾ��
ͼ1�С�Intelligentroom_raw��������һ���ɼ�������������Ľϳ��������͵���Ƶ��ͼ1������Ƶ�о��е����Ե�2֡��Ŀ����������˶���Ŀ���С�仯�ϴ���Ҳ�����仯��ͼ2�С�PetsD2TeC2����������������www.visualsurveillance.org�����ڳ���Ҳ�ı��˷���ʹ�С�����Կ��������ľ�ֵƫ�Ƹ��ٷ�����������Ŀ���С�ĸı䣬�Ѿ�������������������㷨������ӦĿ��ߴ�ͷ���ĸı䡣
��1 �㷨����Ч�ʶԱ�
Table 1 Comparison of processing speeds of two algorithms

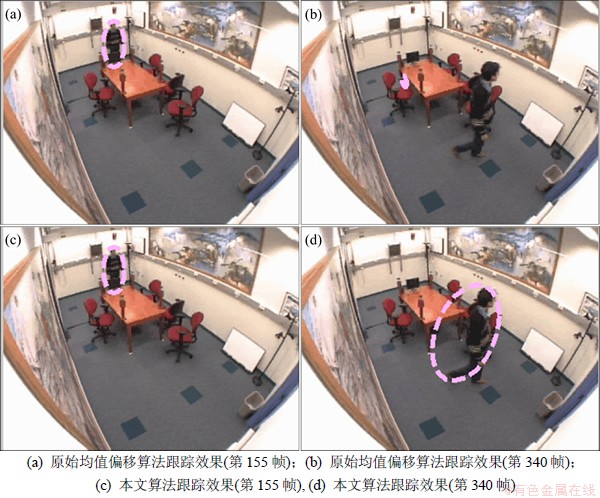
ͼ1 ����Intelligentroom_raw�ĸ���Ч���Ա�
Fig.1 Comparison of tracking effect on Intelligentroom_raw sequence

ͼ2 ����PetsD2TeC2�ĸ���Ч���Ա�(��300֡��380֡)
Fig.2 Comparison of tracking effect on PetsD2TeC2 sequence
4 ����
(1) ���һ���µĻ�����ɫֱ��ͼ��Ŀ������㷨������㷨�����ŵ���������Ŀ�����״�ʹ�Сͬʱ�ı�������ͨ������Ŀ����ɫֱ��ͼ�ĺ��ܶȺ���ģ�ͣ������µ�EM�㷨�����Ŀ���λ�ú�����Ŀ����״��Э�������V��
(2) ���㷨�ܹ�����ʵʱ��������Ҫ��ֻ�Ǽ�������Ŀǰ��Ŀ����״�ͳߴ�仯���и������ѵ��㷨ʱҪ���µĻ�����ɫֱ��ͼ��Ŀ����ٹ����ǻ��ھ�ֵƫ���㷨����չ���£�����ֵƫ���㷨�����������Ӿ�����Ҳ���������ԡ�
�ο����ף�
[1] Comaniciu D, Ramesh V, Meer P. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 564-577.
[2] Jarabo-Amores P, Rosa-Zurera M, de la Mata-Moya D, et al. Spatial-range mean-shift filtering and segmentation applied to SAR images[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(2): 584-597.
[3] NG Heungsun, WU Taipang, TANG Chikeung. Surface- from-gradients without discrete integrability enforcement: A Gaussian kernel approach[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(11): 2085-2099.
[4] ������, ����, �Դ���, �ȣ����ڶ���������Ӧ�ںϵĺ˸��ٷ���[J]. �Զ���ѧ��, 2008, 34(4): 393-399.
WANG Yongzhong, LIANG Yan, ZHAO Chunhui, et al. Kernel-based tracking based on adaptive fusion of multiple cues[J]. Acta Automatica Sinica, 2008, 34(4): 393-399.
[5] ����, ���. ���ڷֿ���ɫֱ��ͼ��MeanShift �����㷨[J]. ϵͳ����ѧ��, 2009, 21(10): 2936-2939.
HU Yin, YANG Jingyu. Tracking algorithm based on block color histogram and Mean Shift[J]. Journal of System Simulation, 2009, 21(10): 2936-2939.
[6] Bradski G R. Real time face and object tracking as a component of perceptual user interface[C]//Proc IEEE Workshop on Applications of Computer Vision. New Jersey, USA: IEEE Press, 1998: 214-219.
[7] Comaniciu D, Ramesh V, Meer P. Real-time tracking of non-rigid objects using mean shift[C]//Proc IEEE Conf on Computer Vision and Pattern Recognition. South Carolina, USA: IEEE Press, 2000, 2: 142-149.
[8] Ning J, Zhang L, Zhang D, et al. Robust object tracking using joint color-texture histogram[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2009, 23(7): 1245-1263.
[9] Collins R. Mean-shift blob tracking through scale space[C]//Proc IEEE Conf on Computer Vision and Pattern Recognition. Wisconsin, USA: IEEE Press, 2003: 234-240.
[10] Zivkovic Z, Krose B. An EM-like algorithm for color-histogram- based object tracking[C]//IEEE Conference on Computer Vision and Pattern Recognition. Washington D C, USA: IEEE Press, 2004: 798-803.
[11] ��ڱ�, ��ط�. ������ɫ����ֱ��ͼ�Ĵ�Ȩ�ֿ��ֵƯ��Ŀ������㷨[J]. ��������������ͼ��ѧѧ��, 2011, 23(12): 2059-2066.
LI Guanbin, WU Hefeng. Weighted fragments-based Meanshift tracking using color-texture histogram[J]. Journal of Computer- Aided Design & Computer Graphics, 2011, 23(12): 2059-2066.
[12] SHEN Chunhua, Kim J, WANG Hanzi. Generalized kernel- based visual tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2010, 20(1): 119-130.
[13] Leichter I, Lindenbaum M, Rivlin E. Mean Shift tracking with multiple reference color histograms[J]. Computer Vision and Image Understanding, 2010, 114(3): 400-408.
[14] ���, ������, �½���. ��������ȸ߷ֲ����ģ�͵ľ����[J]. ���մ�ѧѧ��: ��Ȼ��ѧ��, 2011, 32(6): 701-705.
ZHU Feng, SONG Yuqing, CHEN Jianmei. Clustering method based on elliptical contoured mixture model[J]. Journal of Jiangsu University: Natural Science Edition, 2011, 32(6): 701-705.
[15] Takeda H, Farsiu S, Milanfar P. Deblurring using regularized locally adaptive kernel regression[J]. IEEE Transactions on Image Processing, 2008, 17(4): 550-563.
(������)
�ո����ڣ�2012-02-13�������ڣ�2012-05-03
������Ŀ��������Ȼ��ѧ����������Ŀ(91120002��41001306)
ͨ�����ߣ�Ф��ʤ(1975-)���У������人�ˣ���ʿ�������ڣ���������Ƶ�źŴ�����ͨ���о����绰��027-68753538��E-mail: js_xiao@tom.com
ժҪ����������˶�Ŀ������㷨��Ŀ���С����״�仯����Ӧ�����ϲ�Ҳ��ܶ�Ŀ�����ת���и��ٵ����⣬���һ�ָĽ���Ŀ������㷨�����㷨�Ǿ�ֵƫ���㷨�Ľ�һ����չ�����죬�ڹ���Ŀ��λ�õ�ͬʱ��Э�������������Ŀ����״�����ɫ��ֱ��ͼ����������ĽǶȺ���״����С�����仯ʱ�ĸ������⡣ʵ�����������Ľ����㷨�ڲ�ͬ�����¸���Ŀ���³���Ժܺã����������˸��پ��ȣ����к�ǿ��ʵ���ԡ�
