
DOI: 10.11817/j.issn.1672-7207.2016.10.015
���������ת�ƶ���������ϵͳ��������
����ƽ����ƾ�
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
�ڻ�ת�ε��ƶ����������һ�ֻ��ڶ��ε��ڼ�����Һѹ����������������ϵͳ��ͨ�������ϳ���ת�Ĺ����ص㣬���ù��ʼ���ͼ���۽�����ת���ܻ������õ���ѧģ�͡����ϵͳ�����IJ�ȷ���Լ����ڵ�����ţ��������Ӧģ����ģ�������Ի�ת�ٶȽ��и��ٿ��ƣ�������������ŵ����֤������ϵͳ���ȶ��Ժ������ԡ�Ϊ��ϵͳ�����Ż���ƣ��������Һѹ�������ݻ�������ѹ������ת�ƶ�ʱ����3����Ҫ���ض�ϵͳ�������ܵ�Ӱ����ɡ��о����������������Ļ�תϵͳ���ƶ�ʱ����Ч������������գ����У���ת�ƶ�ʱ���ϵͳ����ѹ������������Ч��Ӱ�����Һѹ�������ݻ��ͳ���ѹ������������Ч��Ӱ���С�����Ժ�ѹ����ѹ������Ӱ��ϴ�
�ؼ��ʣ�
�����������ת�������������������ε��ڼ���������Ӧģ��������
��ͼ����ţ�TH137.5 ���ױ�־�룺A ���±�ţ�1672-7207(2016)10-3386-08
Design and analysis of energy recovery system of rotary drilling rig during braking motion
HU Junping, LI Kejun
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: In order to recover the braking energy from the rotary drilling rig during swing motion, the energy recover system was proposed based on the secondary regulation technology and hydraulic accumulator. According to the working principle of the rotary system, the mathematical model of rotary inertia energy recycling was developed by bond graph. To solve the problem of the uncertain parameters and external disturbances of the system, the adaptive fuzzy sliding mode controller (AFSMC) was employed to track the preset rotational angular velocity, and the Lyapunov function was introduced to confirm the stability and convergence of the control system. To optimize the system design, the effects of main parameters on the system performance were studied. The results show that the rotary braking time has the greatest influence on the system pressure and energy recovery efficiency, while the volume and pre-charge pressure of hydraulic accumulator volume have relatively smaller influence on the energy recovery efficiency, but great influence on the pressure fluctuation of constant pressure network.
Key words: rotary drilling rig; rotary kinetic energy; energy recover; the secondary regulation technology; adaptive fuzzy sliding mode controller (AFSMC)
��������ǹ��̻�е��ҵ�л���Һһ�廯ʩ���ĸ߶��豸����������������ע�������ҵ������ɴ���ʮ�ס����ų��е������ȴ��ģ�������̽�������������豸���ҹ��õ��˹㷺Ӧ�úͷ�չ[1]��
��������Ľṹ��Ҫ�ɶ���ͷ����ߡ���ˡ������������תװ�ú͵��̵���ɡ���תװ������������е�1���dz���Ҫ�Ĺ�������������ҵ��Ƶ������ͣ�������˶����ϳ���ת�ɷ�Ϊ��������ת���ƶ�3���Ρ����ڻ�ת����ת���������ƶ�ʱ�ͷų������Ĺ����ܣ�����������ƽ�ⷧ�Ľ������ϣ������˷�����������ϵͳ���ȸ��ɣ����ҽ���ҺѹԪ����ʹ��������Ӱ��ϵͳ����������[2]����ˣ��о���������Ļ�ת�ƶ��������ն��������Ľ��ܼ��š��ȶ�����������Ҫ���塣���е��ƶ���������ϵͳ���¿��Է�Ϊ��еʽ���ܡ�����ʽ���ܺ�Һѹʽ���������ࡣ��еʽ������Ҫ���÷��ִ��ܣ������ֽϴ�������������Ҫ�ϴ�İ�װ�ռ䣬���ڶ��ӻ����´��ڰ�ȫ����[3-4]���Գ������ݺ�����Ϊ����Ԫ�����͵��϶����������ڹ����ܶȵ͡�����ת�����ڶ�������������Ч�ʵ͡����е���/���ؼ����������ȱ�ݣ���̫�ʺϹ��̻�е[5-7]���ֽβ�����������Ϊ����װ�õ�Һѹ��϶���������Ϊ�ȵ㣬�����й����ܶȴ�����ת�������١���������Ч�ʸߵ��ŵ�[8]��Һѹ��϶��������ڳ�������ijɹ�Ӧ��Ϊ��������Ľ��ܼ����ṩ��һ���µ�;�����о�˼·[9-11]��������ij���������Ϊ�о��������ȸ����ϳ���ת�Ĺ����ص㣬���һ�ֻ��ڶ��ε��ڼ�����Һѹ�������Ļ�ת�ƶ���������ϵͳ[12]�������ü���ͼ���۽���ϵͳ����ѧģ�ͣ�Ȼ�����Һѹϵͳ�߽����ԡ�������ȷ���Լ�ϵͳ���ص㣬��������Ӧģ����ģ��������ʵ����������ڸ��Ӹ��������µ�ת�ٿ��ƣ����ͨ���������Һѹ�������ݻ�����Ҫ������ϵͳѹ������������Ч�ʵ�Ӱ�졣
1 ��ת�ƶ���������ϵͳ���
���ڶ��ε��ڼ��������������ת�ƶ���������ϵͳ�ṹ��ͼ1��ʾ����ϵͳ��Ҫ�ɺ�ѹ�����á�Һѹ����������λ��ͨ��Ż���Һѹ��/����(����Ԫ��)��ת�ٴ���������Һ�ŷ����ͱ�������ɡ�������������ѹ������ΪҺѹ��/�����ṩѹ����Դ��Һѹ�����������ں�ѹ�����ú�Һѹ��/����֮�䣬����ϵͳ����Ĺ��ʺͻ�ת�����Ĺ����ܣ�ͬʱͨ���ȵ���Դ����Һѹ��/���������ʵ�ֶԻ�ת�ٶȵĿ��ơ����幤������Ϊ���ڻ�ת����ʱ������1��2��ͨ����ѹ��������Һѹ������һ���Һѹ��/���﹩�ͣ�Һѹ��/���﹤����Һѹ���﹤����������ת����ת�����ڻ�ת�ƶ�ʱ��Һѹ��/���﹤����Һѹ�ù��������ܹ��Ը��ص�������Һѹ���������ͣ�ʵ�ֻ�ת���ܵĻ��գ����ƶ����ʱ������2�رգ����´�����ʱ������2��ͨ��Һѹ��/�����ٴι�����Һѹ���﹤����Һѹ���������ϴλ��յ����������ͷţ�������ת����ת����
��ͳ���������תװ�õ������ɷ�������Һѹ���ṩ��ͨ�����Ʒ��顢Һѹ����ͼ��ٻ����ݵ�����������ϲ���ת������ͨ����������ƽ�ⷧ��Ԫ���Ľ����������ƶ����������ܺĴ��ϵͳ���ȵ����⣬����ʱӰ��ϵͳ��������������ͼ1��ʾ����������ϵͳ�У��ƶ��������ܿ�����Һѹ��/�������������������ʵ�֣����������˸��ֽ�����ʧ����������Ч������ƶ����ܵĻ����������á���ҵ��Ա���ٶȵ�Ҫ���ͨ������ϵͳʵ�֣�������ϵͳ����Ԥ���ת����������ٶȿ��ơ�
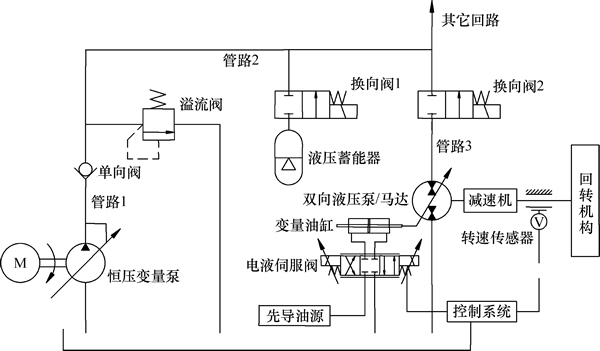
ͼ1 ���ڶ��ε��ڼ����Ļ�תϵͳԭ��
Fig. 1 Principle of slewing system based on the secondary regulation technology
2 ��ѧ��ģ
��ģǰ��ϵͳ�������¼�1) ��ҺѹԪ�������ԡ����ԵIJ������м��д�����2) ������ת�ٺ㶨��������������ȶ����������������ԣ�3) ��ѹ�����õ�б�̵��ڡ����Ŀ�������Ϊ˲̬���̣�4) ������Һ�Ĺ��Բ��迼�ǣ�5) �ȵ���Դѹ���ȶ���6) Һѹ�������Ĵ�/���ܹ��̽���Ϊ���¾��ȹ��̡��������������ת�ƶ��Ĺ���ԭ��������ͼ2��ʾ�Ļ�תϵͳ����ͼģ�͡�
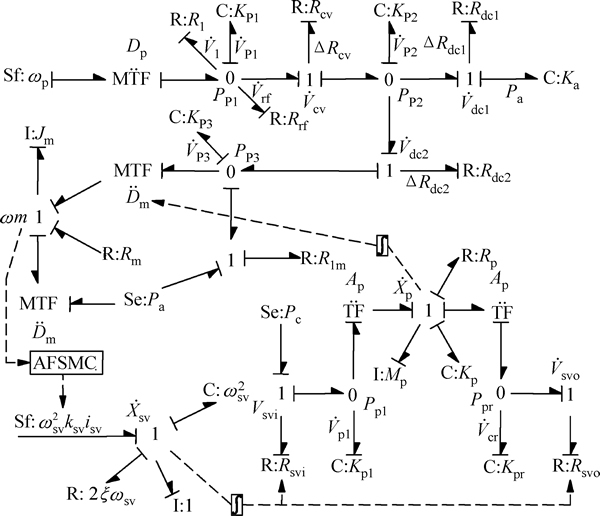
ͼ2 ��תϵͳ����ͼģ��
Fig. 2 Bond graph model of energy recovery system
ͼ2�У�DpΪ��ѹ������ÿת�������ܳ���ѹ�����ƣ�Kp1Ϊ�ó��ڵ�����֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�RplΪ�õ�й©Һ�裬й©����Ϊ ��RrfΪ����������ʱ��Һ�裬��������Ϊ
��RrfΪ����������ʱ��Һ�裬��������Ϊ ��RcvΪ����Һ�裬����������Ϊ
��RcvΪ����Һ�裬����������Ϊ ��Rdv1��Rdv2�ֱ��ʾ����1��2��Һ�裬�����������ֱ�Ϊ
��Rdv1��Rdv2�ֱ��ʾ����1��2��Һ�裬�����������ֱ�Ϊ ��
�� ��Kp2Ϊ�����ڡ���������ںͻ���1��2����֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�KaΪ��ѹ�������ĸն�ϵ�����������йأ�Kp3Ϊ����2���ں�˫�������/�������֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�DmΪ������/����ÿת�������ܱ���������λ�ƵĿ��ƣ�Rm��Jm�ֱ�Ϊ��ת���������ٻ����㵽������/����������ת������ϵ����ת��������RmlΪ������/�����й©Һ�裬����������Ϊ
��Kp2Ϊ�����ڡ���������ںͻ���1��2����֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�KaΪ��ѹ�������ĸն�ϵ�����������йأ�Kp3Ϊ����2���ں�˫�������/�������֮�乤����ǻ�ĵ�ЧҺѹ�նȣ�DmΪ������/����ÿת�������ܱ���������λ�ƵĿ��ƣ�Rm��Jm�ֱ�Ϊ��ת���������ٻ����㵽������/����������ת������ϵ����ת��������RmlΪ������/�����й©Һ�裬����������Ϊ ��PaΪ������/�������ѹ����ȡֵΪ0 Pa����Һ�ŷ����Ľ�����Һ��ֱ�ΪRsvi��Rsvo�������������ֱ�Ϊ
��PaΪ������/�������ѹ����ȡֵΪ0 Pa����Һ�ŷ����Ľ�����Һ��ֱ�ΪRsvi��Rsvo�������������ֱ�Ϊ ��
�� �����������ҹ�����ǻ�ĵ�ЧҺѹ�նȷֱ�ΪKcl��Kcr��Ap��Rc��Mp�ֱ�Ϊ����������Ч����������������Ͳ֮����������ϵ���ͻ����������������
�����������ҹ�����ǻ�ĵ�ЧҺѹ�նȷֱ�ΪKcl��Kcr��Ap��Rc��Mp�ֱ�Ϊ����������Ч����������������Ͳ֮����������ϵ���ͻ���������������� ��
�� ��Ksv��i�ֱ�Ϊ��Һ�ŷ�������ȻƵ�ʡ��˶�����ϵ�������������������������ݼ���ͼģ��״̬���̵����ɹ������Ƶ�����ת�ƶ�ʱ�����������õ���ѧģ�͡�
��Ksv��i�ֱ�Ϊ��Һ�ŷ�������ȻƵ�ʡ��˶�����ϵ�������������������������ݼ���ͼģ��״̬���̵����ɹ������Ƶ�����ת�ƶ�ʱ�����������õ���ѧģ�͡�
��·1���������Է���Ϊ
 (1)
(1)
ʽ�У� ��
�� ��
��
 ��
��
��·2���������Է���Ϊ
 (2)
(2)
ʽ�У� ��
�� ��
��
��·3���������Է���Ϊ
 (3)
(3)
ʽ�У� ��
��
������/��������������ƽ�ⷽ��Ϊ
 (4)
(4)
ʽ�У� ��
�� ΪҺѹ��/��������������
ΪҺѹ��/�������������� ΪҺѹ���������λ�ơ�
ΪҺѹ���������λ�ơ�
������/�����ת��Ϊ
 (5)
(5)
��Һ�ŷ�����о���˶�����Ϊ
 (6)
(6)
�����������������ƽ�ⷽ��Ϊ
 (7)
(7)
ʽ�У�xppΪ��������Ԥѹ������
����������������ٶ�Ϊ
 (8)
(8)
��������ǻ���������Է���Ϊ
 (9)
(9)
ʽ�У� ��
��
��������ǻ���������Է���Ϊ
 (10)
(10)
ʽ�У� ��
��
��·1������ǻ��ѹ��Ϊ ������������ǻѹ���ļ������ơ�
������������ǻѹ���ļ������ơ�
3 ����Ӧģ����ģ���������
��������ϵͳ�Ǹ߽�ϵͳ�����и߶ȷ����ԡ�������ȷ���ԡ�ϵͳ���������Ե��ص㣬��Щ������Ӱ��ϵͳ�Ķ�̬���ܡ�����Ӧģ����ģ���ƽ���˻�ģ���ƺ�����Ӧģ�������Ƶ��ŵ㣬��ϵͳ�ķ����ԡ��������㶯�����ĸ��ž��н�ǿ��³������[13-19]��Ϊ���������ת�ٶȵĿ����ṩ��һ�ֽϺõĽ��;����
3.1 ���������
Ϊ���������źͲ���ϵͳ��ȷ���ԶԻ�ת�ٶȿ��Ƶ�Ӱ�죬������ƻ�ģ��������������������������ֱ�Ϊ��ת������ת�٦�r (����m/n��nΪ���ٻ��Ĵ�����)�ͱ�/�����������ڻ���������u(t)(����Һ�ŷ����������i)��ͨ��ʽ(1)~(10)�ɵ��ٶȿ��Ƶ�״̬���̡�
 (11)
(11)
ʽ�У� ��
�� ;
;  ��XΪʽ(1)~(10)�е�ѹ����������״̬������g(t)��0��d(t)Ϊ��Ӹ��ţ���ϵͳ����������ƽ���������ȡ�
��XΪʽ(1)~(10)�е�ѹ����������״̬������g(t)��0��d(t)Ϊ��Ӹ��ţ���ϵͳ����������ƽ���������ȡ�
���dΪ�ٶ�ָ�����ϵͳ�ĸ������Ϊ
 (12)
(12)
ʽ�У� ��������ֻ�ģ��Ϊ
��������ֻ�ģ��Ϊ
 (13)
(13)
ʽ�У�k1��k2Ϊ����������������ģ���ƴ�������״̬ʱ�� ����
����
 (14)
(14)
����ʽ(11)��(13)�ɵû�ģ�������Ŀ�����Ϊ
 (15)
(15)
����ʵ��Ӧ���У�ϵͳ�ṹ�Ͳ������в�ȷ���ԣ��Ұ���δ֪���ŵ�Ӱ�죬 �������ڻ�ã�Ϊ�ˣ�����ģ���������ƽ����������u*��
�������ڻ�ã�Ϊ�ˣ�����ģ���������ƽ����������u*��
ģ���������Ի�ģ�溯��sΪ���룬����1��������ģ��ϵͳ���Ӷ�����ģ�������������ģ���������ʽΪ�� (���У�i=1��2������m��
(���У�i=1��2������m�� ��aiΪģ������)��
��aiΪģ������)��
ȡaΪ�ɵ�������������Ϊģ�����������������ķ�����ģ��ϵͳ��ģ�������õ�ģ�������������Ϊ
 (16)
(16)
ʽ�У� ��
�� ��
��
 (17)
(17)
����һ�±ƽ�ԭ����ģ��������ʽ(15)��ijһ�������ܹ������⾫��һ�±ƽ����������ʵ��������ˣ�����1������ģ����������� �ƽ�u*(t)����
�ƽ�u*(t)����
 (18)
(18)
ʽ�У���Ϊ�ƽ������� ��EΪ�л����档
��EΪ�л����档
����ģ�������� �ƽ�u*(t)����
�ƽ�u*(t)����
 (19)
(19)
ʽ�У� Ϊ
Ϊ �Ĺ���ֵ������
�Ĺ���ֵ������ ��
��
��ʽ(18)��(19)�ɵ�
 (20)
(20)
��������ģ�������� �ƽ�u*(t)ʱ������ϵͳ�����л�������usv����ʱ�ܿ�����Ϊ
�ƽ�u*(t)ʱ������ϵͳ�����л�������usv����ʱ�ܿ�����Ϊ
 (21)
(21)
����Ӧģ����ģ����ϵͳ�Ľṹ��ͼ3��ʾ��
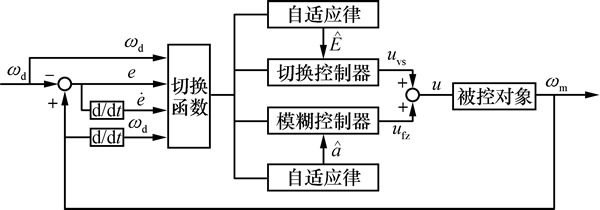
ͼ3 ����Ӧģ����ģ����ϵͳ
Fig. 3 Adaptive fuzzy sliding mode control system(AFSMC)
3.2 ����Ӧ�����㷨���
ʽ(13)��ʱ���ɵ�
 (22)
(22)
���ʽ(15)��(22)��
 (23)
(23)
��ʽ(21)��(23)�ɵ�
 (24)
(24)
����Lyapunov������������ƿ��������ȶ��ԣ�����Lyapunov����Ϊ
 (25)
(25)
ʽ�У� ��
��  ����1�ͦ�2Ϊ��������
����1�ͦ�2Ϊ�������� Ϊ���Ƶ��л����棬ʵ��ϵͳ������ͨ������ȷ��[18]��
Ϊ���Ƶ��л����棬ʵ��ϵͳ������ͨ������ȷ��[18]��
��ʽ(25)��ʱ���ɵ�
 (26)
(26)
Ϊʹ ����������Ӧ�ʺ��л�����Ϊ
����������Ӧ�ʺ��л�����Ϊ
 (27)
(27)
 (28)
(28)
 (29)
(29)
��
 (30)
(30)
�����ϵķ������Եó�����ƵĿ��������ȶ��ģ�����ϵͳ�����ᱻ�����ں�С�ķ�Χ�ڡ�
4 �������
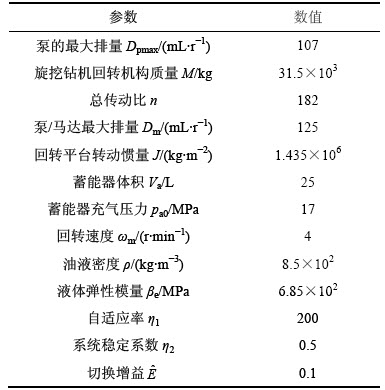
��ij���������Ϊ�о�������Ҫ�����������1����Ҫ˵�����ǣ�1) �궷����ɳ��������������ת������ȣ������Ͽ��Ժ��ԣ�������ڻ�ת�˶������У�ϵͳ��ת��������Ϊ��ֵ��2) ����������ϳ���ת�����������ص㣬ֻ��ѡȡ1����������(������������ת���ƶ���������������ת���ƶ�)���з��������3) ��ת����ת�������ϴ�Ϊ�����ת���˶��������ij������֤ϵͳ�ȶ���ͬʱ����������ҵЧ�ʣ�ת�ٿ�����4 r/min���ҡ�ͼ4��ʾΪԤ��������ٶ����ߡ�����Matlab�����Խ����Ļ�תϵͳ�ٶȿ���ģ�ͽ��з�����⣬����ʱ����Ϊ20 s��
ͼ4��ʾΪ1�����������������ת�ٵ���Ӧ���ߡ���ͼ4���Կ���������ϵͳ���ԽϺõظ���Ԥ��������ٶ��źţ�ϵͳ����������Ӧ�ٶȿ�������Ч���ã�֤�����õĿ��Ʒ�����Ч��ͼ5��ʾΪϵͳ��������Ӧ���ߡ�����ͼ5��֪����3.0 sʱ����ʼ��ת������Һѹ������������������/���﹩�ͣ���3.4 sʱ��ϵͳѹ���½�����ѹ�õ���ֵ���£���ѹ�ú�ѹ������һ���ϵͳ���ͣ���4.4 sʱ����ת�ٶ������ȶ�����ѹ��ͬʱ����ѹ��������������/���﹩�ͣ���8.2 sʱ����ʼ��ת�ƶ���������/���ォ��ת������ת��ΪҺѹ�ܴ洢��Һѹ�������У���ѹ��ֹͣ���ͣ���8.8 sʱ����ɻ�ת�ƶ���������������ת���ƶ��Ķ�̬��Ӧ�������ơ�
��1 ��������ϵͳ�������
Table 1 Simulation parameters for the energy recovery system
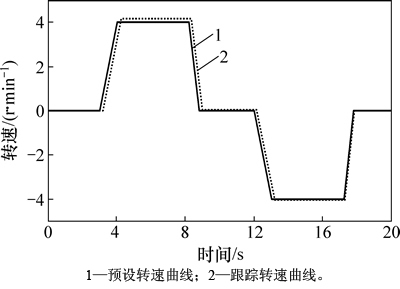
ͼ4 1������������ת����Ӧ����
Fig. 4 Speed response curves of rotation during one working cycle
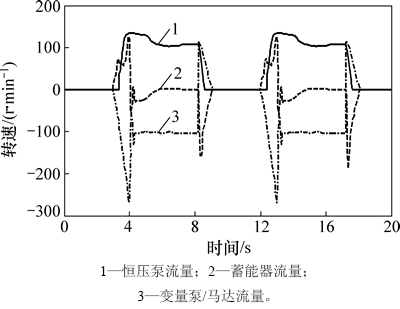
ͼ5 1������������������Ӧ����
Fig. 5 Response curves of flow during one working cycle
4.2 ����Ӱ���о�
�����ƶ��������յ�Ч��Ϊ
 (31)
(31)
 (32)
(32)
 (33)
(33)
ʽ�У�EaccΪҺѹ���������յ�������E0Ϊ�ƶ�ǰ��תϵͳ���еĶ��ܡ�
ͼ6(a)��ʾΪҺѹ�������ݻ���ϵͳѹ����Ӱ�졣��6(a)�ɼ�����Һѹ����������ѹ��һ��������£�Һѹ���������ݻ�Խ��ϵͳѹ���ڻ��������Ĺ����б仯����ԽС�������������ҺѹԪ���Ŀɿ��Ժ�ʹ��������ͼ6(b)��ʾΪ��ͬ������Һѹ�������ݻ��仯����������Ч�ʵ�Ӱ�졣��ͼ6(b)���Կ���������Һѹ�������ݻ�������תϵͳ�ƶ���������Ч��������ߣ������ݻ�����һ��ֵ�����������ݻ��ֱ�ȡ40 L��63 Lʱ����Ӧ����������Ч�ʷֱ�Ϊ59.4%��60.0%����������С�����������ʵ�������Ƽ�����˵��������Һѹ���������ݻ�����̫�����塣
ͼ7(a)��ʾΪҺѹ����������ѹ����ϵͳ����ѹ����Ӱ�졣��ͼ7(a)��֪����Һѹ�������ݻ�һ��ʱ��Һѹ����������ѹ��Խ��ϵͳѹ���ڻ������������еı仯����ԽС��������Ϊ����ѹ��Խ��Һѹ��������Һѹ�ն�Խ��ѹ�����ѹ��������ԽС��������ij���ѹ��������Һѹ�������Ĺ���������ͼ7(b)��ʾΪ��ͬ������Һѹ����������ѹ����ϵͳ��������Ч�ʵ�Ӱ�졣��ͼ7(b)�ɼ���������ѹ��Ϊ11��14��17��20 MPaʱ����Ӧ����������Ч�ʷֱ�Ϊ60.9%��60.1%��59.4%��58.9%�����Ϸ���������Һѹ����������ѹ������������Ч�ʵ�Ӱ���С����ϵͳѹ��Ӱ��ϴ�
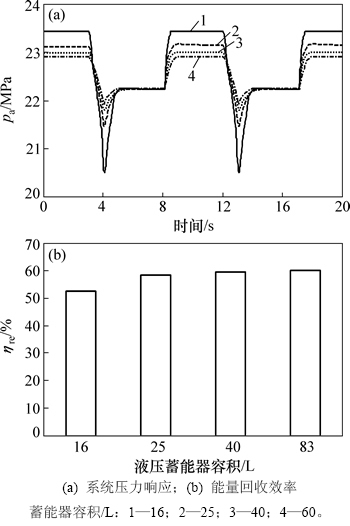
ͼ6 Һѹ�������ݻ���ϵͳ���ܵ�Ӱ��
Fig. 6 Effect of hydraulic accumulator volume on system performance
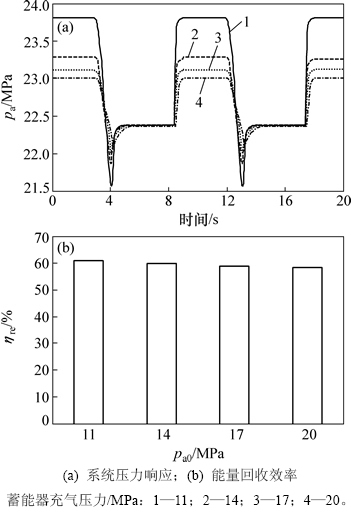
ͼ7 Һѹ����������ѹ����ϵͳ���ܵ�Ӱ��
Fig. 7 Effect of pre-charge pressure of hydraulic accumulator volume on system performance
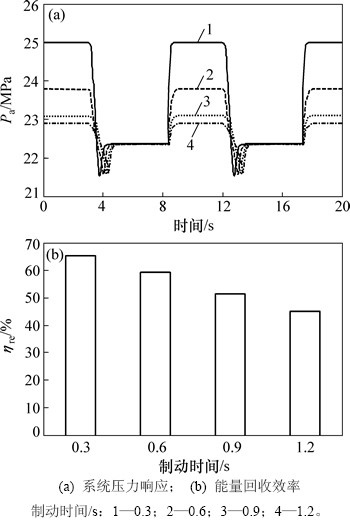
ͼ8��ʾΪ��ת�ƶ�ʱ���ϵͳ�������ܵ�Ӱ�졣��ͼ8�ɼ������ƶ�ǰ��ת�ٶ�һ�����ƶ�ʱ����0.3 s����1.2 sʱ��ϵͳ��ѹ����3.5 MPa����0.9 MPa��������Ϊ�ƶ�ʱ��Խ�̣���ת�ƶ���Խ��ϵͳѹ���ڻ������������еı仯����Ҳ��֮����������ϵͳ����������Ч��(��ͼ8(b))�����ƶ�ʱ����1.2 s����0.3 sʱ��ϵͳ����������Ч�ʴ�45.1%����65.3%)��������Ϊ�ƶ�ʱ��Խ�̣�������Ħ����й¶�ϵ�����Խ�٣�Һѹ���������յ�����Խ�����ƶ�ʱ���ϣ������ϵͳ����������Ч�ʺͽ��ͺ�ѹ����ѹ���������ì�ܵģ������ʱҪȨ�⿼�ǡ�
ͼ8 �ƶ�ʱ���ϵͳ���ܵ�Ӱ��
Fig. 8 Effect of braking time on system performance
5 ����
1) ����һ�ֻ��ڶ��ε��ڼ�����Һѹ�������Ļ�תҺѹϵͳ��ͨ������Һѹ��/�����б�̽Ƕȿ����ϵͳ���������ƶ�������ԭ���������˸��ֽ�����ʧ��ͬʱҺѹ��������ʱ���ڴ���/�ͷŸ��ܶ�����������ʵ�����������ת���ܵĻ������á�
2) ��Ƶ�����Ӧģ����ģ������������Ӧ���ơ�ģ�����ơ���ģ���������л���ϣ���ַ��Ӹ����ŵ㣬�������������תϵͳ�IJ�����ȷ�����ⲿ���ţ����нϺõĶ�̬��Ӧ���ܺ���̬���ƾ��ȣ�����ϵͳת�ٿ��ƺ���ƽ���Ե�Ҫ��
3) �ƶ�ʱ��Ի���ϵͳ��Ӱ�������������Ч�ʺ�ϵͳѹ�����������ƶ�ʱ��ļ�С���������ʱӦȨ�⿼�ǡ�����Һѹ���������ݻ���ʹϵͳѹ��������С������һ���̶��������������Ч�ʣ�����Һѹ����������ѹ��Ҳ�ɽ���ϵͳѹ��������������������Ч��Ӱ���С��
�ο����ף�
[1] ���廪, ����÷, �콨��, ��. ���۱�������������������װ�õĶ���ѧ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(6): 2150-2156.
HE Qinghua, KANG Huimei, ZHU Jianxin, et al. Dynamic mechanical properties of working device of rotary drilling rig under lift-arm luffing conditions[J]. Journal of Central South University (Science and Technology), 2012, 43(6): 2150-2156.
[2] �����, �Ժ�ǿ, ����. �������������ϵͳ�·����ܻ��յķ���[J]. �人��ѧѧ��(��ѧ��), 2012, 45(2): 241-245.
FANG Xiaoyu, ZHAO Hongqiang, LIU Peng. Simulation study of main winch system geopotential energy recovery in rotary driller[J]. Engineering Journal of Wuhan University (Engineering Science),�� 2012, 45(2): 241-245.
[3] ������, ���̺�. ���ִ����Ͷ��ε�����������ϵͳ[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2009, 37(4): 75-79.
LIU Haichang, JIANG Jihai. Flow-coupled secondary regulation system integrated with flywheel energy storage[J]. Journal of South China University of Technology (Science and Technology), 2009, 37(4): 75-79.
[4] ����. ���÷��ִ��ܵ�����������Һѹ����ϵͳ�о�[J]. Һѹ������, 2012, 3: 27-29.
YANG Xin. Energy-recovery hydraulic lifting system with flywheel energy storage[J]. Hydraulic and Pneumatic, 2012, 3: 27-29.
[5] VANESSA P, TERESA D, ARTURO D R, et al. Super-capacitors fuel-cell hybrid electric vehicle optimization and control strategy development[J]. Energy Convers Manage, 2007, 48(11): 3001-3008.
[6] ����, ���廪, �Ŵ���, ��. ��϶����泵����Ч�����ۼ���������ϵͳ����[J]. ���ִ�ѧѧ��(��ѧ��), 2014, 44(1): 29-34.
GONG Jun, HE Qinghua, ZHANG Daqing, et al. Evaluation for energy saving effect of hybrid forklift and testing for energy saving system[J]. Journal of Jilin University (Engineering Science), 2014, 44(1): 29-34.
[7] �����. �͵��϶����ھ���Ĺؼ������о�[J]. ��е����ѧ��, 2013, 49(20): 123-129.
WANG Qingfeng. Research on key technology of oil-electric hybrid excavator[J]. Journal of��Mechanical Engineering, 2013, 49(20): 123-129.
[8] �ܾ���, �½�. �����ƶ���������ϵͳ�����������Է���[J]. Һѹ������, 2010(1): 59-62.
CAO Junfeng, CHEN Jie. Characteristics analysis of accumulator applied in regenerative braking system[J]. Chinese Hydraulics & Pneumatics, 2010(1): 59-62.
[9] �����, ����ƽ, ��־��. һ��Һѹ��϶�������ȼ�;������о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(1): 80-86.
LI Juncheng, LIU Jingping, HAN Zhiyu. Fuel economy of a hydraulic hybrid vehicle[J]. Journal of Central South University (Science and Technology), 2011, 42(1): 80-86.
[10] ���, Ҧ��, ������, ��. ������Һѹ��϶����������ܿ��Ʋ���[J]. ũҵ����ѧ��, 2013, 29(4): 45-54.
WU Di, YAO Jin, HAN Jiahua, et al. Control strategy of a series connected hydraulic hybrid vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(4): 45-54.
[11] �ž���, Էʿ��, κ��, ��. ����Һѹ��϶�������������չ��Ӧ��ǰ��[J]. ������Һѹ, 2009, 37(2): 181-184.
DU Jiuyu, YUAN Shihua, WEI Chao, et al. The application and development of hydraulic hybrid powertrain of vehicle[J]. Machine Tool & Hydraulics, 2009, 37(2): 181-184.
[12] ���̺�. ���ε���ѹ��������Һ��������[M]. ����: ��е��ҵ������, 2013: 5-37.
JIANG Jihai. The two regulation pressure coupling hydrostatic transmission technology[M]. Beijing: China Machine Press, 2013: 5-37.
[13] HU Junping, LI Kejun. Thermal-hydraulic modeling and analysis of the bydraulic system by pseudo-bond graph[J]. Journal of Central South University, 2015, 8(2): 267-278.
[14] ����ƽ, ��ƾ�. ��������ȷ���ʱ��Һ��϶���ѧ�ļ���ͼ��ģ[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(2): 495-502.
HU Junping, LI Kejun. Dynamics model of mechanical-hydraulic coupling of auger driller during luffing motion by bond graph[J]. Journal of Central South University (Science and Technology), 2016, 47(2): 492-502.
[15] HO H F, WONG Y K, RAD A B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear SISO systems[J]. Simulation Modeling Practice and Theory, 2009, 17(7): 1199-1210.
[16] NECHADI E, HARMAS M N, HAMZAOUI A. A new robust adaptive fuzzy sliding mode power system stabilizer[J]. Electrical Power and Energy Systems, 2012, 42(1): 1-7.
[17] NOROOZI N, ROOPAEI M, JAHROMI M Z. Adaptive fuzzy sliding mode control scheme for uncertain systems[J]. Communications in Nonlinear Science and Numerical Simulation, 2009, 14(11): 3978-3992.
[18] CERMAN O, HUSEK P. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism[J]. Expert Systems with Application, 2012, 39(11): 10269-10277.
[19] ���, �̺�, ������. ����ʽ�ߵ�ƽ̨������Ӧģ����ģ��̬����[J]. �����Ƽ���ѧѧ��, 2013, 12(6): 41-45.
LI Anliang, CAI Hong, BAI Xibin. Adaptive fuzzy sliding mode stabilization control for floated inertial platform[J]. Journal of National University of Defense Technology, 2013, 12(6): 41-45.
(�༭ �²ӻ�)
�ո����ڣ�2015-11-12�������ڣ�2016-01-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51175518)������ʡ�Ƽ�����С��ҵ�������»���������Ŀ(12C26214305029) (Project(51175518) supported by the National Natural Science Foundation of China; Project(12C26214305029) supported by the Small and Mid-sized Enterprise Technology Innovation Fund of Hunan Province)
ͨ�����ߣ���ƾ�����ʿ������Һѹ��е������о���E-mail��likejuncsu@126.com
ժҪ��Ϊ������������ڻ�ת�ε��ƶ����������һ�ֻ��ڶ��ε��ڼ�����Һѹ����������������ϵͳ��ͨ�������ϳ���ת�Ĺ����ص㣬���ù��ʼ���ͼ���۽�����ת���ܻ������õ���ѧģ�͡����ϵͳ�����IJ�ȷ���Լ����ڵ�����ţ��������Ӧģ����ģ�������Ի�ת�ٶȽ��и��ٿ��ƣ�������������ŵ����֤������ϵͳ���ȶ��Ժ������ԡ�Ϊ��ϵͳ�����Ż���ƣ��������Һѹ�������ݻ�������ѹ������ת�ƶ�ʱ����3����Ҫ���ض�ϵͳ�������ܵ�Ӱ����ɡ��о����������������Ļ�תϵͳ���ƶ�ʱ����Ч������������գ����У���ת�ƶ�ʱ���ϵͳ����ѹ������������Ч��Ӱ�����Һѹ�������ݻ��ͳ���ѹ������������Ч��Ӱ���С�����Ժ�ѹ����ѹ������Ӱ��ϴ�
[2] �����, �Ժ�ǿ, ����. �������������ϵͳ�·����ܻ��յķ���[J]. �人��ѧѧ��(��ѧ��), 2012, 45(2): 241-245.
[3] ������, ���̺�. ���ִ����Ͷ��ε�����������ϵͳ[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2009, 37(4): 75-79.
[4] ����. ���÷��ִ��ܵ�����������Һѹ����ϵͳ�о�[J]. Һѹ������, 2012, 3: 27-29.
[7] �����. �͵��϶����ھ���Ĺؼ������о�[J]. ��е����ѧ��, 2013, 49(20): 123-129.
[8] �ܾ���, �½�. �����ƶ���������ϵͳ�����������Է���[J]. Һѹ������, 2010(1): 59-62.
[9] �����, ����ƽ, ��־��. һ��Һѹ��϶�������ȼ�;������о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(1): 80-86.
[10] ���, Ҧ��, ������, ��. ������Һѹ��϶����������ܿ��Ʋ���[J]. ũҵ����ѧ��, 2013, 29(4): 45-54.
[11] �ž���, Էʿ��, κ��, ��. ����Һѹ��϶�������������չ��Ӧ��ǰ��[J]. ������Һѹ, 2009, 37(2): 181-184.
[12] ���̺�. ���ε���ѹ��������Һ��������[M]. ����: ��е��ҵ������, 2013: 5-37.
[14] ����ƽ, ��ƾ�. ��������ȷ���ʱ��Һ��϶���ѧ�ļ���ͼ��ģ[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(2): 495-502.
[19] ���, �̺�, ������. ����ʽ�ߵ�ƽ̨������Ӧģ����ģ��̬����[J]. �����Ƽ���ѧѧ��, 2013, 12(6): 41-45.
