
��������Ԥ��״̬���Ƶ����绯���ſ���
�� ��1, 2������ƽ2, 3��������2
(1. �㶫��ҵ��ѧ �Զ���ѧԺ���㶫 ���ݣ�510006��
2. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
3. Department of Engineering, University of Glamorgan, Pontypridd CF37 1DL, UK)
ժ Ҫ��
ժ Ҫ�� ������绯����ϵͳ�д��ڵ�ʱ�������յ�ʱ�Ӻ����ݰ���ʧ�������������Ԥ��״̬���Ƶ����绯���Զ�����˹(LQG)���ſ����㷨�����ڴ��������յ�ʱ�ӵ���������Ƿ����źŵ������յ�ʱ�Ӵ���1���������ڵ�����������绯����Ԥ��״̬�����㷨�봫ͳ���ſ����㷨��ϣ����������յ�ʱ�ӵ�Ӱ�졣���ڴ���ʱ�����ݰ���ʧ���������ʱ�����ݰ���ʧ��״̬����Ϊ1����Ԫ��ֵ�������ٶ������ݰ���ʧʱĿ��ڵ㱣����һʱ�̵�ֵ��������Ӧ������Ԥ��״̬�����������Զ�����(LQ)���ſ���������Ʒ������о�������������붨�����������绯����Ԥ��״̬���Ʒ�����ȱ���������������յ�ʱ����������ݰ���ʧ��Ŀ���ӣ���Ԥ��������Э�����������Ӷ��������ſ���ϵͳ�Ĵ����������������ʵ����֤���㷨����Ч�Ժ����۷�������ȷ�ԡ�
�ؼ��ʣ�
���绯����ϵͳ�� �����յ�ʱ���� ���ݰ���ʧ�� ����Ԥ��״̬������ LQG���ſ�����
��ͼ����ţ�TP273 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2009)04-0993-10
Networked linear quadratic Gauss optimal control based on optimal predictive state estimation
TANG Bin1, 2, LIU Guo-ping2, 3, GUI Wei-hua2
(1. Faculty of Automation, Guangdong University of Technology, Guangzhou 510006, China;
2. School of Information Science and Engineering, Central South University, Changsha 410083, China;
3. Department of Engineering, University of Glamorgan, Pontypridd CF37 1DL, UK)
Abstract: A networked linear quadratic Gauss (LQG) optimal control algorithm based on optimal predictive state estimation was proposed for networked control systems with network-induced time delay and packet loss. In the case of network-induced time delay in which the feedback delay is longer that a sampling period, the optimal predictive state estimator was designed to combine the traditional optimal controller to compensate the influence of network-induced time delay and the separation theorem was proved to hold. In the case of packet loss, it is assumed that the receiving nodes hold the last value when packet loss occurs, the design method of the corresponding optimal predictive state estimator and linear quadratic (LQ) optimal controller is derived by modeling the state of packet loss as a binary variable. The results show that the separation theorem holds between the optimal predictive estimator and the designed optimal controller. With the increment of network-induced time delay and packet loss, the predictive estimation error covariance matrix and the cost of the related optimal control system appreciably increase. Simulation and experiment results show the effectiveness of the proposed algorithm.
Key words: networked control systems; network-induced time delay; packet loss; optimal predictive state estimation; LQG optimal control
���绯����ϵͳ��Ӧ�˹�ҵ����ϵͳ�����ɢ�������绯�����ܻ��ķ���չ�����ƣ����гɱ��͡�����С�����ĵ͡���װά�������ƣ����˶�����ơ�¥���Զ��������պ��������õ��˹㷺Ӧ�ã��Ӷ���Ϊ����������о��ȵ�[1-7]��Ŀǰ�����Ƕ����绯LQG(Linear quadratic Gauss)���ſ��������о��϶ࡣ����ڴ�����������յ�ʱ�ӵ������Nilsson��[8-10]�������ʱ����ɢ�������о������绯����ϵͳ��LQG���⣬�ֱ����������յ�ʱ�Ӳ�����1����������[8]�ʹ���1����������[9-10]��������������߶�û�������練��ʱ�Ӵ���1���������ڵ���������ڴ������ݰ���ʧ�������Sinopoli��[11]���������ݰ���ʧ����µ�ʱ�����ſ������⣬�������绯����ϵͳ�������ݰ���ʧ��������ѻ������ݰ���ʧ������Ƶ���ɢʱ�� Kalman �˲���Ӧ����LQG���ſ������⣬��֤����������������ݰ���ʧ������·���ԭ����Ȼ������Imer��[12]���ǻ������ݰ���ʧ���ʵĶ��������ſ������⣬�����˻��ڿ������ݰ���ʧ���ʵ����绯���ſ���������Ʒ�����Ȼ�������ڴ��ڴ�Χʱ�����ݰ���ʧ��������������ݰ���ʧ���ʵ����绯LQG���Ʋ���ȡ����������ܡ�������[13]�ٶ���ʱ�㶨��С��1 ���������ڣ�����Lyapunov ���������Ծ���ʽ�Լ��������ĸ����״̬������·���绯�Ŀ���ϵͳ���������������ƣ���Ѱ��ij���ֲ����ſ��������棬ʹ���绯����ϵͳ�����ȶ���ͬʱʹ�ÿ���������ɱ�����ﵽ���
��������������绯����ϵͳ�д��ڵ�ȷ����ʱ�������յ�ʱ�Ӻ����ݰ���ʧ�����ǻ�������Ԥ��״̬���Ƶ����绯LQG���ſ������⡣���ڴ��������յ�ʱ�ӵ���������Ƿ����źŵ������յ�ʱ�Ӵ���1���������ڵ�����������绯����Ԥ��״̬�����㷨�봫ͳ���ſ����㷨��ϣ����������յ�ʱ�ӵ�Ӱ�죬֤�����붨�����������ڴ���ʱ�����ݰ���ʧ��������ٶ������ݰ���ʧʱĿ��ڵ㱣����һʱ�̵�ֵ������ʱ�����ݰ���ʧ��״̬����Ϊ1����Ԫ��ֵ������������Ӧ������Ԥ��״̬��������LQ���ſ���������Ʒ�����֤������������붨����ͨ�������ʵ����֤�㷨����Ч�ԡ�
1 ��������
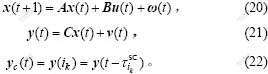
�������µ���ɢʱ������ϵͳ��
 �ٶ���
�ٶ���
a. ��(t)��v(t)��Ϊ���ֵ�İ��������������������������

b. x(t)�ij�ʼֵx(0)��1�����������x(0)��ͳ����������֪�ģ���
![]() ��
��
![]() ��
��
���У�P(0)�dz�ʼ�˲����������������ֵ��
c. x(0)���(t)��v(t)���������
![]() ��
��![]() ��
��
1.1 ���������յ�ʱ�ӵ����
������ɢʱ������ϵͳ(1)��(2)������![]() Ϊ����ֵy(t)�����ĴӴ�������������֮��������յ�ʱ�ӣ�
Ϊ����ֵy(t)�����ĴӴ�������������֮��������յ�ʱ�ӣ�![]() Ϊ��Ӧ�����ź�u(t)�����Ĵӿ�������ִ����֮��������յ�ʱ�ӣ�
Ϊ��Ӧ�����ź�u(t)�����Ĵӿ�������ִ����֮��������յ�ʱ�ӣ�![]() Ϊ��Ӧ�ıջ������յ�ʱ�ӡ�
Ϊ��Ӧ�ıջ������յ�ʱ�ӡ�
1.1.1 ���������յ�ʱ��
�ٶ���ǰʱ��Ϊt������������յIJ���ֵ����![]() ���ٶ�uc(t+��ca)Ϊtʱ�����������ɵĿ�������������������ɵĿ���������
���ٶ�uc(t+��ca)Ϊtʱ�����������ɵĿ�������������������ɵĿ���������![]() ���ɴ˿ɵã�
���ɴ˿ɵã�
 ��(6)��֪�����ڵ�ǰʱ��t��x(t+��ca)���ڿ������Dz����еģ���ˣ�������uc(t+��ca)�ļ��㽫ͨ������Ԥ��״̬������
��(6)��֪�����ڵ�ǰʱ��t��x(t+��ca)���ڿ������Dz����еģ���ˣ�������uc(t+��ca)�ļ��㽫ͨ������Ԥ��״̬������![]() �����㡣��ʱ�����绯LQG���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(3)~(5)��������ſ�����(6)��ʹ�ö��δ��ۺ���
�����㡣��ʱ�����绯LQG���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(3)~(5)��������ſ�����(6)��ʹ�ö��δ��ۺ���
1.1.2 ʱ���н������յ�ʱ��
���������յ�ʱ����ʱ��ģ�����������������ݰ�������ҵ�����Ϊ�˿˷�����ʱ��ʱ�Ӻ����ݰ�������ҵĶԿ������ܵ�Ӱ�죬��ִ����������1�������������ڴ洢�ӿ������˷������Ŀ��������С�����![]() Ϊ�ӿ�������ִ�����������յ�ʱ�ӵ��Ͻ磬���ٶ��ÿ��������еij���Ϊ
Ϊ�ӿ�������ִ�����������յ�ʱ�ӵ��Ͻ磬���ٶ��ÿ��������еij���Ϊ![]() ����ÿ���������
����ÿ���������![]() �����У�
������![]()
![]() ����
����![]() ʱ����ʾ��Ӧ�Ŀ�������δ����ִ����������ʾ��Ӧ�Ŀ����ź��ѵ���ִ��������Ȼ�����ڵ�ǰʱ��t��
ʱ����ʾ��Ӧ�Ŀ�������δ����ִ����������ʾ��Ӧ�Ŀ����ź��ѵ���ִ��������Ȼ�����ڵ�ǰʱ��t��![]() ���dz�����
���dz�����
����ʱ���н������յ�ʱ�ӵ�Ӱ�죬�ɵ�ϵͳ(1)~(2)����չϵͳ��
 ��Ҫע���ǣ����µ����ݰ�����Բ���ʱ�����Եģ����½��յ����ݰ���������ݰ�����Ŀ��ڵ��˳����Եġ��������д������ݰ�������ң������ʱ����˳������Ӧ���ݰ������մ�����ͬ��
��Ҫע���ǣ����µ����ݰ�����Բ���ʱ�����Եģ����½��յ����ݰ���������ݰ�����Ŀ��ڵ��˳����Եġ��������д������ݰ�������ң������ʱ����˳������Ӧ���ݰ������մ�����ͬ��
���ڵ�ǰʱ��t�����������յIJ���ֵ����Yk={ y(i1), ��, y(ik)}����Ӧ��ʱ������ΪTk���ٶ�tʱ�����������ɵĿ�����Ϊ![]() ��������������ɵĿ���������
��������������ɵĿ���������![]()
![]() ���ɴ˿ɵã�
���ɴ˿ɵã�
 ��ϵ��ͬ����������
��ϵ��ͬ����������![]() �ļ��㽫ͨ������Ԥ��״̬������
�ļ��㽫ͨ������Ԥ��״̬������![]() �����㣬�����ʱ�������յ�ʱ�ӵ�Ӱ�����ͨ��ִ�����Ļ�����������Ԥ��״̬���Ƶõ�������
�����㣬�����ʱ�������յ�ʱ�ӵ�Ӱ�����ͨ��ִ�����Ļ�����������Ԥ��״̬���Ƶõ�������
����ʱ���н������յ�ʱ�ӣ����绯���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(8)~(10)��(12)��������ſ�����(11)��ʹ�ö��δ��ۺ���
����
1.2 �������ݰ���ʧ�����
�����������ݰ���ʧ������ʱ���ٶ�ִ����������һʱ���Ŀ�������
1.2.1 �����������յ�ʱ�ӵ����
����ϵͳ(1)~(2)�����Ǵ������ݰ���ʧ�ұ����յ����ݰ�������ʱ�������յ�ʱ�ӵ�������ɵ���չϵͳ��
���ڵ�ǰʱ��t�����������յIJ���ֵ����![]() ������
������![]() ��ʾ���������ݰ��ķ���״̬����ȡֵ��ʱ����������֪��
��ʾ���������ݰ��ķ���״̬����ȡֵ��ʱ����������֪��![]() ��ʾִ�������յ��˿��������ɵĿ�����
��ʾִ�������յ��˿��������ɵĿ�����![]() ��
��![]() ��ʾִ����û�н��յ�
��ʾִ����û�н��յ�![]() ���ٶ�tʱ�����������ɵĿ�����Ϊ
���ٶ�tʱ�����������ɵĿ�����Ϊ![]() ��������������ɵĿ���������
��������������ɵĿ���������![]() ���ɴ˿ɵã�
���ɴ˿ɵã�
Ϊ�˼����⣬�ٶ�����ֵ�Ϳ��������ݰ��Ķ�ʧ״̬��ͬ���ģ���![]() ����ˣ����绯���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(14)~(16)��(18)��������ſ�����(17)��ʹ�ö��δ��ۺ���
����ˣ����绯���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(14)~(16)��(18)��������ſ�����(17)��ʹ�ö��δ��ۺ���
����
1.2.2 ���������յ�ʱ�ӵ����
����������ͬʱ�������ݰ���ʧ�������յ�ʱ�ӵ��������ϵͳ(1)~(2)�ɵã�
���ڵ�ǰʱ��t�����������յIJ���ֵ����Yk={y(i1), ��, y(ik)}����Ӧ��ʱ������ΪTk���ٶ�tʱ�����������ɵĿ�����Ϊ![]() �������������ɵĿ���������
�������������ɵĿ���������![]()
![]() �����ƿɵã�
�����ƿɵã�
 ������ʱ��t��
������ʱ��t��![]() ���ڿ������Dz����еģ���ˣ�������
���ڿ������Dz����еģ���ˣ�������![]() �ļ���ͨ��
�ļ���ͨ��![]() �Ĺ���ֵ��ʵ�֡�
�Ĺ���ֵ��ʵ�֡�
ͬ���أ��ٶ�����ֵ�Ϳ��������ݰ��Ķ�ʧ״̬��ͬ���ģ���![]() ����ˣ����绯���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(20)~(22)��(24)��������ſ�����(23)��ʹ�ö��δ��ۺ���
����ˣ����绯���ſ�����������Ϊ��������չ����ɢʱ������ϵͳ(20)~(22)��(24)��������ſ�����(23)��ʹ�ö��δ��ۺ���
����
2 ���绯LQG���ſ���
2.1 ��ͳLQG���ſ���
������ɢʱ������ϵͳ(1)~(2)�Ͷ��δ��ۺ���
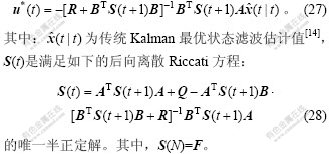
��ͳLQG���ſ���Ϊ��
2.2 ���������յ�ʱ�ӵ����
2.2.1 ���������յ�ʱ��
�ڶ����������յ�ʱ������£�LQG��������ſ��Ʋ����봫ͳ����ͬ����ͬ�����������յ�ʱ�Ӵ���ʱ��Ҫͨ������Ԥ��״̬���Ʒ��̶�ʱ�ӽ��в������ٶ���ǰʱ��Ϊt�����������յ�ʱ������µ�����Ԥ��״̬����Ϊ��
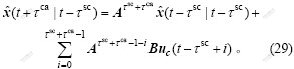
��Ӧ��Ԥ�����������Ϊ
 ��ʽ��29����֪�����������յ�ʱ�ӵĴ��ڣ�����Ԥ��״̬����
��ʽ��29����֪�����������յ�ʱ�ӵĴ��ڣ�����Ԥ��״̬����![]() ���˲�����
���˲�����![]() ��������
��������![]() (j=0, ��, ��sc+��ca-1)�йء����ջ������յ�ʱ��Ϊ0������sc+��ca =0ʱ����ʽ(29)�ɵô�ͳ��Kalman�˲�����ֵ��
(j=0, ��, ��sc+��ca-1)�йء����ջ������յ�ʱ��Ϊ0������sc+��ca =0ʱ����ʽ(29)�ɵô�ͳ��Kalman�˲�����ֵ��
��ʽ(30)��֪�����������յ�ʱ�ӵĴ��ڣ�����Ԥ��״̬�������������˲�����������![]() �������յ�ʱ�Ӧ�sc�ͦ�ca�йء���A������ڴ���0������ֵʱ��ʽ(30)�ұߵĵ�1�������ʱ�ӵ��������������֮����ݼ����������յ�ʱ���㹻��ʱ���������0������A���������ֵ�Ƿ����0��ʽ(30)�ұߵĵ�2������ʱ�ӵ�������ǵݼ�����˵�A������ֵ����0ʱ��
�������յ�ʱ�Ӧ�sc�ͦ�ca�йء���A������ڴ���0������ֵʱ��ʽ(30)�ұߵĵ�1�������ʱ�ӵ��������������֮����ݼ����������յ�ʱ���㹻��ʱ���������0������A���������ֵ�Ƿ����0��ʽ(30)�ұߵĵ�2������ʱ�ӵ�������ǵݼ�����˵�A������ֵ����0ʱ��![]() �ǵ����ģ���A������ֵС��0���������յ�ʱ���㹻��ʱ��
�ǵ����ģ���A������ֵС��0���������յ�ʱ���㹻��ʱ��![]() ͬ���ǵ����ġ�
ͬ���ǵ����ġ�
������������Ԥ��״̬���������Dz���ȫ״̬��Ϣ��������µķ��붨�������ڵ�ǰʱ��t�������ź�Ϊ![]() ����������Ԥ������ź�Ϊ
����������Ԥ������ź�Ϊ![]() �����ÿ����ź�������
�����ÿ����ź�������![]() ��
��
���²�����ѧ���ɷ�֤�����붨����������ſ����ɡ�����δ��ʱ�̵Ĵ���Ϊ��
![]()
![]()
![]()
![]()
![]()
![]()
![]() ��
��
���У�![]() ����ʼ����
����ʼ����
![]()
![]()
![]()
![]()
![]()
![]() ��
��
��![]() �Ķ���ɵã�
�Ķ���ɵã�
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ��
��
����ʽ�ɵ����ſ����ɣ�
![]()
![]() �� (31)
�� (31)
��Ӧ����С����Ϊ��
![]()
![]()
![]() ��
��
����
![]()
![]() ��
��
![]()
![]()
![]()
![]()
![]()
![]()
![]() ��
��
�������������������յ�ʱ������»�������Ԥ��״̬���Ƶ����绯LQG���ſ���������붨����
����ʽ(31)��֪�����������յ�ʱ�ӵĴ��ڣ����ſ�����![]() ������Ԥ��״̬����
������Ԥ��״̬����![]() ����Ӧ��
����Ӧ��![]() �йء��������յ�ʱ�ӵ���0ʱ�����绯LQG���ſ�����ת��Ϊ��ͳ�������
�йء��������յ�ʱ�ӵ���0ʱ�����绯LQG���ſ�����ת��Ϊ��ͳ�������
��A���ڴ���0������ֵʱ��![]() ����ʽ�ұߵ�������������յ�ʱ�ӵ�����������������
����ʽ�ұߵ�������������յ�ʱ�ӵ�����������������![]() ����Ӧ����С����Ҳ�ǵ����ġ���A������ֵС��0ʱ������ʽ�ұߵĵ�3��͵�4�����������յ�ʱ�ӵ����������0�����ǣ������������յ�ʱ���㹻��ʱ��
����Ӧ����С����Ҳ�ǵ����ġ���A������ֵС��0ʱ������ʽ�ұߵĵ�3��͵�4�����������յ�ʱ�ӵ����������0�����ǣ������������յ�ʱ���㹻��ʱ�� ![]() �ض���ʱ�ӵ������������
�ض���ʱ�ӵ������������![]() ����Ӧ����С�����������յ�ʱ���㹻��ʱ�ض�������
����Ӧ����С�����������յ�ʱ���㹻��ʱ�ض�������
2.2.2 ʱ���н������յ�ʱ��
��ʽ(29)~(30)���ƣ�ʱ���н������յ�ʱ������µ�����Ԥ��״̬����Ϊ��
![]()
![]()
![]() ��
��
��Ӧ������Ԥ�����������
![]()
![]()
![]() ��
��
���У�![]() ΪKalman�˲�����������
ΪKalman�˲�����������
��ʽ(31)���ƣ�ʱ���н������յ�ʱ������£���������Ԥ��״̬���Ƶ����绯LQG���ſ���������붨�������ſ����ɸ������£�
![]()
![]() ��
��
��Ӧ����С����Ϊ
![]()
![]()
![]()
![]() ��
��
����
![]()
![]()
![]() ��
��
![]()
![]() ?
?
![]()
![]()
![]()
![]()
![]()
![]() ��
��
2.3 �������ݰ���ʧ�����
2.3.1 �����������յ�ʱ�ӵ����
���ڽ��������ݰ���ʧ����������ȸ�������Ԥ��״̬�����㷨��Ȼ��֤������Ԥ������������绯���ſ������Ƿ�������붨����
��(14)��(18)�ɵ���չϵͳ��

�ڴ������ݰ���ʧ�������ݰ�û�������յ�ʱ�ӵ�����£��ٶ���ǰʱ��t����1���µ����ݰ��������ʱ��Ϊik����t=ik�������绯����Ԥ��״̬�����㷨�������£�

��ʽ(33)~(37)�ɵã���t=ik-1+j��ikʱ���������ݰ���ʧ��������j����������Ԥ��״̬�����㷨������������������յ�ʱ�ӵ�������ơ��ڵ�ǰʱ��t=ik�������������յ������ź�y(ik)ʱ������Ԥ��״̬�����㷨�봫ͳKalman�˲��㷨���ƣ���֮ͬ������������![]() ��Ϊ��ǰʱ���˲�״̬���Ʒ����е�Ԥ��״̬����ֵ��
��Ϊ��ǰʱ���˲�״̬���Ʒ����е�Ԥ��״̬����ֵ��
�������ſ����ź�ֻ��![]() ��ʱ�����ɣ�����
��ʱ�����ɣ�����![]() ��ʱ�������ɿ����źţ���ִ����������һʱ����ʵ�ʿ����źţ���ˣ�ֻ����
��ʱ�������ɿ����źţ���ִ����������һʱ����ʵ�ʿ����źţ���ˣ�ֻ����![]() ����������ʱ��֮��Ĺ�ϵ�����Ƶأ��ɵ���С�����ۺ���
����������ʱ��֮��Ĺ�ϵ�����Ƶأ��ɵ���С�����ۺ���![]() �����ſ����ɣ�
�����ſ����ɣ�
 ��Ӧ����С����Ϊ��
��Ӧ����С����Ϊ��

�����������ڽ��������ݰ���ʧ������£�����Ԥ��״̬�����������绯LQG���ſ�����������붨�����Ҹ������ſ����ɼ�ʽ(38)��
���������۷�����֪���ڼ��跴��ͨ���Ϳ���ͨ�������ݰ���ʧ״̬һ�£��ҵ����ݰ���ʧʱ���սڵ㱣����һʱ��ֵ������£����绯LQG���ſ����㷨��������Ȼ���ڴ�ͳ�㷨�����ܣ�ԭ�����ڣ���������Ԥ��״̬�����㷨�����ܵ��ڴ�ͳ�㷨�����ܣ����ߣ����绯LQG���ſ����㷨����ʱ��ik(k={1, 2, ��})�������ſ��ƣ�����������ԭ�������ø÷��������㷨�������Ե����ڴ�ͳ�����ÿһʱ�����������ſ��ƵĴ�ͳLQG���ſ����㷨�����ܡ�
2.3.2 ���������յ�ʱ�ӵ����
���������д������ݰ���ʧ�����͵����ݰ����������յ�ʱ�ӣ��Ҳ��������ݰ�������ҵ����������Ԥ��״̬����Ҫͬʱ���ڲ���ʱ�����ݰ���ʧ�������յ�ʱ�ӵ�Ӱ�졣
�ٶ���ǰʱ��Ϊt�����½��յIJ���ֵ���ݰ�Ϊ��k������Ӧ�IJ���ʱ��Ϊik��Ϊ�˲��������Ӱ�첢��ʵ�����ſ��ƣ���ʱ����õ�����״̬���ƶ�Ӧ��ʱ��![]() ���ù��Ʒ�2�����У���1�������ݷ����IJ���ֵ�ź�y(ik)���x(ik)�������˲�����
���ù��Ʒ�2�����У���1�������ݷ����IJ���ֵ�ź�y(ik)���x(ik)�������˲�����![]() ��
��![]() ����ͨ��ʽ(33)~(37)��ã���2��������
����ͨ��ʽ(33)~(37)��ã���2��������![]() ��
��![]() ����ȡ
����ȡ![]() ʱ��������Ԥ�����
ʱ��������Ԥ�����![]() ������
������![]() ʱ����״̬
ʱ����״̬![]() ������Ԥ��״̬���ƣ�
������Ԥ��״̬���ƣ�
��Ӧ��Ԥ��״̬����������Ϊ��
�����ſ����ɵ��������У�����Ԥ��״̬����ֵ![]() �����Ӧʱ�����˲�״̬����ֵ
�����Ӧʱ�����˲�״̬����ֵ![]() ����ʱ��Ӧ���˲�״̬���������
����ʱ��Ӧ���˲�״̬���������![]() ��
��![]() �����ͨ����˵
�����ͨ����˵![]() ҪС��
ҪС��![]() �����绯���ſ����ɵľ����������벻���������յ�ʱ�ӵ���� ��ͬ��
�����绯���ſ����ɵľ����������벻���������յ�ʱ�ӵ���� ��ͬ��
3 �� ��
��1��������·����Ϊ���������绯LQG���ſ��Ƶķ��棬����֤�������۷������������Ʒ�������Ч�ԡ������������ڵ���ɢʱ��״̬�ռ䷽�����£�
��������Ϊ0.2 s�����ص�ϵͳ�Ŷ��Ͳ��������ֱ�Ϊ![]() ��
��![]() �������У���(t)��v(t)��ʵ��ͳ������Ϊ��
�������У���(t)��v(t)��ʵ��ͳ������Ϊ��
![]() ��
��
![]() ��
��
3.1 ��ͳLQG���ſ���
�������ڵĴ�ͳLQG���ſ����㷨�ķ�������ͼ1��ʾ���ɷ�������֪���ڴ�ͳ��� �£����ô�ͳLQG���ſ����㷨�ܹ���������Ч�����ڴ��������յ�ʱ�Ӻ����ݰ���ʧ������£����ô�ͳLQG���ſ����㷨�Ŀ��������½���״̬��Ӧ���Ӿ磬״̬����ƫ������ʵ���ϣ����������յ�ʱ�ӵ�����״̬��Ӧ������ɢ��
3.2 ���绯LQG���ſ���
�������ڵ����绯LQG���ſ����㷨�ķ�������ͼ1��ʾ����ͼ1��֪�����������ڴ�
�������յ�ʱ�Ӻ����ݰ���ʧ����������绯LQG���ſ����㷨��״̬��Ӧ����һ�����ݵ���֮��������״̬����ƫ��Ҳ�ڳ�ʼʱ�̶�������֮��������������������ڴ�ͳLQG���ſ����㷨���Ը��ƣ����������Ŀ���Ч����������ڴ�ͳ����µĴ�ͳLQG���ſ����㷨�������������½���
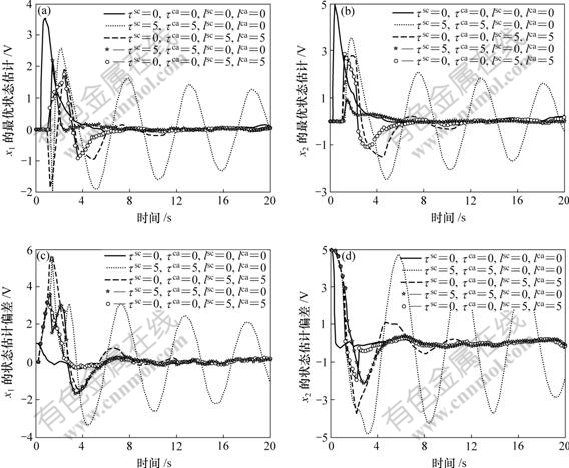
���ߡ���������---��Ϊ��ͳLQG���ſ����㷨�������������Ϊ���绯LQG���ſ����㷨������
ͼ1 ��ͳ�ĺ����绯LQG���ſ����㷨�ķ�����
Fig.1 Simulation results of traditional and networked LQG optimal control algorithms
4 ʵ ��
ʵ�����п�Ժ�Զ�����������NetConϵͳ�ϵ�ʵ�֡�������ʵ����̵ij�ʼ�ף�����Ԥ��״̬���������˳�ʼʱ����ǰ�Ŀ��������У��������п�����u(t)=5�������Ƿ�������мٶ���u(t)=0����ˣ�ʵ�������������״̬����ֵ�ڳ�ʼ�δ������ԵIJ��
4.1 ��ͳLQG���ſ���
�������ڵĴ�ͳLQG���ſ����㷨��ʵ������ͼ2��ʾ������������ƣ����������ڴ�ͳ����£����ô�ͳLQG���ſ����㷨�ܹ��������Ŀ������ܡ��ڴ��������յ�ʱ�Ӻ����ݰ���ʧ����£����ô�ͳLQG���ſ����㷨��״̬��Ӧ�Ӿ磬״̬����ƫ���������������Խ��͡�
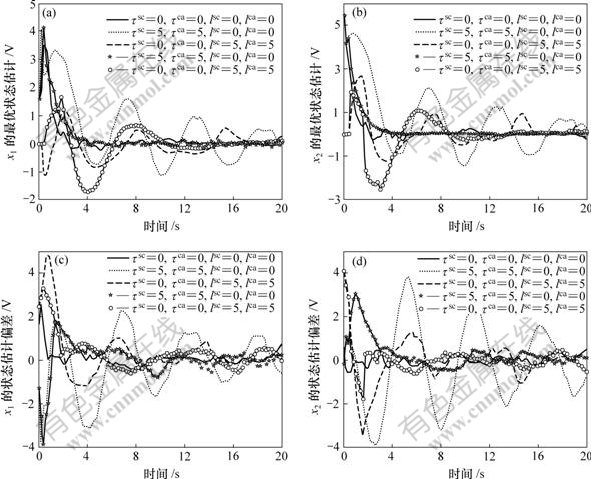
���ߡ���������---��Ϊ��ͳLQG���ſ����㷨�������������Ϊ���绯LQG���ſ����㷨������
ͼ2 ��ͳ�ĺ����绯LQG���ſ����㷨��ʵ����
Fig.2 Experiment results of traditional and networked LQG optimal control algorithm
4.2 ���绯LQG���ſ���
�������ڵ����绯LQG���ſ����㷨��ʵ������ͼ2��ʾ������������ƣ�����ڴ�ͳLQG���ſ����㷨���ڴ��������յ�ʱ�ӵ�����£�״̬��Ӧ�켣����ƫ������������ܹ��������Ŀ���Ч�����ڴ������ݰ���ʧ������£�״̬��Ӧ�켣����ƫ������ݵ���֮�������������������Ը��ƣ����������Ŀ���Ч����
5 �� ��
a. ������绯����ϵͳ�д��ڵ�ʱ�������յ�ʱ�Ӻ����ݰ���ʧ�������������Ԥ��״̬���Ƶ����绯LQG���ſ����㷨��
b. �Դ��������յ�ʱ�ӵ�����������˷����źŵ������յ�ʱ�Ӵ���1���������ڵ�����������绯����Ԥ��״̬�����㷨�봫ͳ���ſ����㷨��ϣ����������յ�ʱ�ӵ�Ӱ�죬֤���˷��붨��������
c. ���ڴ���ʱ�����ݰ���ʧ���������ʱ�����ݰ���ʧ��״̬����Ϊ1����Ԫ��ֵ�������ٶ������ݰ���ʧʱĿ��ڵ㱣����һʱ�̵�ֵ����������Ӧ������Ԥ��״̬��������LQ���ſ���������Ʒ����������ʵ������֤���㷨����Ч�Ժ����۷�������ȷ�ԡ�
�ο����ף�
[1] Gupta V, Hassibi B, Murray R M. Optimal LQG control across packet-dropping links[J]. Systems & Control Letters, 2007, 56: 439-446.
[2] Hu S, Yam W Y. Stability robustness of networked control systems with respect to packet loss[J]. Automatica, 2007, 43: 1243-1248.
[3] Huang M, Dey S. Stability of Kalman filtering with Markovian packet losses[J]. Automatica, 2007, 43: 598-607.
[4] Imer O C, Yuksel S, Basar T. Optimal control of LTI systems over unreliable communication links[J]. Automatica, 2006, 42: 1429-1439.
[5] Liu G P, Mu J X, Rees D, et al. Design and stability analysis of networked control systems with random communication time delay using the modified MPC[J]. International Journal of Control, 2006, 79: 288-297.
[6] Xiong X L, Lam J. Stabilization of linear systems over networks with bounded packet loss[J]. Automatica, 2007, 43: 80-87.
[7] Yang F W, Wang Z D, Huang Y S, et al. H-inf control for networked systems with random communication delays[J]. IEEE Transactions on Automatic Control, 2007, 51: 511-518.
[8] Nilsson J, Bernhardsson B, Wittenmark B. Stochastic analysis and control of real-time systems with random time delays[J]. Automatica, 1998, 34(1): 57-64.
[9] ��֮ѵ, �»���, ���¾�. ����Markov�ӳ����Եıջ��������ϵͳ�о�[J]. ����������Ӧ��, 2002, 19(2): 263-267.
YU Zhi-xun, CHEN Hui-tang, WANG Yue-juan. Research on markov delay characteristic-based closed loop network control system[J]. Control Theory and Applications, 2002, 19(2): 263-267.
[10] Hu S S, Zhu Q X. Stochastic optimal control and analysis of stability of networked control systems with long delay[J]. Automatica, 2003, 39: 1877-1884.
[11] Sinopoli B, Schenato L, Franceschetti M, et al. Time varying optimal control with packet losses[C]//43rd IEEE Conference on Decision and Control, Piscataway: IEEE, 2004, 2: 1938-1943.
[12] Imer O C, Yuksel S, Basar T. Optimal control of LTI systems over unreliable communication links[J]. Automatica, 2006, 42: 1429-1439.
[13] ����, ������, 忼̹�, ��. һ�����绯����ϵͳ�ľֲ����ſ��������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(2): 352-355.
KONG De-ming, FANG Hua-jing, JIAN Ji-gui, et al. Design of local optimal controller for a class of network control systems[J]. Journal of Central South University: Science and Technology, 2006, 37(2): 352-355.
[14] ��־��. ����״̬������ϵͳ��ʶ[M]. ������������ҵ��ѧ������, 2004.
WANG Zhi-xian. Optimal state estimation and system identification[M]. Xi��an: Northwestern Polytechnical University Press, 2004..
�ո����ڣ�2008-12-26�������ڣ�2009-03-05
������Ŀ��������Ȼ��ѧ����������Ŀ(60634020, 60874008)���㶫ʡ��Ȼ��ѧ�����о��Ŷ�������Ŀ(8351009001000002)
ͨ�����ߣ��� ��(1979-)���У����������ˣ���ʿ����ʦ���������绯����ϵͳ���о����绰��13242877870��E-mail: tangbin316@163.com
