
���ߴ���������k�ȸ��ǿ����㷨
������1��л����1��֣�2
(1. ���ݴ�ѧ �������ѧ���������ѧԺ���㶫 ���ݣ�510006��
2. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
�����һ���������������μ�����������Ŀ�����Ƕȵ��жϷ��������ڴ˻��������k�ȸ����㷨(Reuleaux triangle-based k-coverage algorithm, RTC)�����㷨���Ȱ�ÿ���������ڵ�ĸ�֪Բ���ֳ�6����ȵ����������������������жϸ������Ƿ�ﵽ�û������縲�Ƕȵ�Ҫ��Ȼ�������Ӧ�ڵ�����Ծ״̬ʵ�ֶ�Ŀ�������k�ȸ��ǡ�ʵ����������RTC�㷨�ڱ�֤���縲�������������ܹ���Ч�ؽ��ͻ�Ծ�ڵ�����������������������Ч�ʣ��Ӷ��ӳ����������ڡ�
�ؼ��ʣ�
���ߴ�����������k�ȸ�����������������״̬������
��ͼ����ţ�TP393 ���ױ�־�룺A ���±�ţ�1672-7207(2014)11-3832-08
k-coverage control algorithm for wireless sensor networks
XING Xiaofei1, XIE Dongqing1, ZHENG Jin2
(1. School of Computer Science and Educational Software, Guangzhou University, Guangzhou 510006, China;
(2. School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: A k-coverage decision approach was presented using the geometrical characteristics of Reuleaux triangle, and a Reuleaux triangle-based k-coverage control algorithm (RTC) was proposed based on the coverage decision theorem. By slicing the sensing range of sensor into six cross Reuleaux triangle with the same size, the RTC algorithm first judges whether the region is k-covered based on the user��s requirements on coverage degree, then schedules the appropriate sensors into the active state to achieve the k-coverage of network. The simulation results show that RTC algorithm decreases the total number of active sensors effectively, improves the energy efficiency of network and prolongs the network lifetime.
Key words: wireless sensor network; k-coverage; Reuleaux triangle; state scheduling
���ߴ����������Ǽ���Ϣ�ɼ�������ͨ����һ���������磬�ܹ������û�Զ���ռ�����������Ϣ���Զ�����ʽ������Ϣ���ݸ��û�����������������Ϣ�����ϵ��һ�����縲�����������ߴ����������е�һ���������⣬����Ҫ��ӳ�������ڵ��ڲ������ζ�Ŀ���������Ч��⣬Ҳ�������������(QoS)����Ҫ����ָ��֮һ�������縲������������ص��ǽڵ�IJ���ʽ[1]������Ȼ�������ӵ���������ͨ���˹���ʽ������ڵ�ʱ������Ҫ������������ȹ���������ڵ㣬�������Ϊ����Բ���ڵ㷽ʽ�����������ֲ���ʽ�нڵ�λ��Ԥ�Ȳ�ȷ�������ַ�ʽ������Ҫ������������Ľڵ㣬���ܱ�������Ľ�׳�Ժ��ݴ��ԣ�����Ҳ�����˽ڵ㸲�Ƕȿ������⡣ͬʱ����һЩ��Ҫ��Ŀ��������ͼ1��ʾ�ľ���ս���϶Եз�̹�˵�Ŀ���ʵʱ��⣬Ϊ�˻�ø��ߵļ������Ҫ����Ҫ��Ŀ������ʵ�ж��ظ��ǣ�����Ƕ��ظ������⣬���Ϊk�ȸ�������[2-4]��������Ҫ����������ʽ�µ�����k�ȸ�����������о������ڽڵ�����ɱ�����������ƣ��������ڵ�ͨ��ʹ���������ĵ�����ṩ������Դ����ʵ�ʲ���ڵ�ʱ������Ŀ������ϴ�����Ҫ����ڵ�Ĺ�ģ�ϴڵ�ֲ���Χ��Ϊ�㷺������Ļ���Ҳ�Ƚϸ��ӣ�����ͨ�������������ڵ��ػ�����ֶ������������dz����ѻ����ʵ�֡�����������ת��Ϊ����������������⣬������������Ľ��������Ҫ��2�֣���1���ǿ��ƽڵ���ܶ�[5]������ҪӦ���������ʼ�滮�Σ���2���ǽڵ�״̬����[6-8]�����ַ������ڲ�����ϵͳ�������ܵ������£�ͨ������ѡ��һ���ֽڵ���Ϊ��Ծ�ڵ㣬���������ڵ���뵽���ĵ�˯��״̬�����ٻ�Ծ�ڵ���������ﵽ��������нڵ���������Ч�ʵ�Ŀ�ġ����Ľ��Խڵ���ȷ���Ϊ���������k�ȸ����㷨��
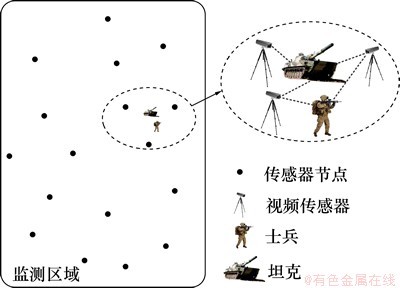
ͼ1 WSN�ھ���ս�����Ӧ��ʾ��
Fig. 1 A monitoring application of WSN in military battlefield
����ڵ㲿��ʽ�µ�k�ȸ�������ɷֽ�Ϊ2�������⣺��1�������縲�ǵķ�Χ�ڣ����ȷ��Ŀ�����������һ��Ŀ�궼���ٴ���1���������ڵ�ļ�ⷶΧ�ڣ���2�����û������縲�Ƕ�Ҫ�����ʱ����ε��Ȼ��ƶ��������ڵ�ʵ�ֶ�Ŀ������Ķ��ظ��ǡ�����������⣬���������������һ���������������μ���������Ŀ�����Ƕȵ��б���Ȼ���ڴ˻���������������������ε�k�ȸ����㷨(Reuleaux triangle-based k-coverage algorithm, RTC)��ͨ��������Ӧ�ڵ��״̬�ﵽ���縲��������Ҫ���ĵ���Ҫ�о����ݰ�����1) �������е�Ŀ�긲��ģ�ͣ�����������������εļ���������Ŀ�����Ƕȵ��ж�������������2) ���ڽڵ�״̬���Ȼ��ƣ������k�ȸ����㷨(RTC)���㷨���и��Ӷȵ͡���չ�Ժõ��ŵ㣻3) ͨ������ʵ�飬�Ի�Ծ�ڵ�����������������Ϊ����ָ�꣬ͨ���Ա�CCP[8]����������RTC�㷨�����ܡ�
1 ��ع���
���������������ڵ������k�ȸ���������о���Ҫ�ǻ��ڸ��Ǽ����ۺͽڵ�״̬���Ȳ��Խ��н�������ڽڵ㸲�Ǽ����۵Ľ��˼·�ǰ���һ���IJ���ѡ��һ���ֽڵ㣬��������ȫ��������Ŀ���������������С���ڵ㼯��ģ��Ammari��[9]�Խڵ㼯�������֡���ʽ���о����ظ������⣬ͨ�������Ƶ��õ�ʵ������k�ȸ��ǵij�������������4������Э���������Э���ܹ�ѡ����С�����Ľڵ㼯��ʵ��k�ȸ��Ǽ������ͬʱ��Ϊ�˱�֤�������ͨ�ԣ��ṩ�˽ڵ�ͨ�Ű뾶Ӧ���Ӧ�뾶���ֵı�����ϵ����������������[9]�����Ļ����ϣ��������k�ȸ���������ڵ���Ⱥ�����ת����������һ���о������һ�����ڵ�λλ����Ϣ������ת��Э�飬Э����Ҫ�����ݽڵ��Ӧ��ͨ�ŷ�Χ�IJ�ͬ��ѡ����Ӧ�Ľڵ㣬�Ӷ�ʵ�ֶԼ�������k�ȸ���[3]��Ashouri��[6]������Ľڵ㻮�ֳ����ɲ��ཻ�Ľڵ㼯��ÿ���ڵ㼯���ܹ��������Ǽ���������ò�����������(SAT)�����ҵ����Žڵ㼯���췽������˷�����չӦ�������k�ȸ��ǡ�½���е�[10]�����һ�ֻ���̰��������С���Ǽ������㷨���ڹ��츲�Ǽ��Ĺ����У�����ѡ����չ���������Ч�ڵ���븲�Ǽ����㷨����ĸ��Ǽ���ģ��С�������㷨�����Ƿֲ�ʽ�ģ����ʺ��������Ĵ��������硣
���ڽڵ�״̬���ȷ����Ľ��˼·�ǽ����ڵ�λ����Ϣ��ѡ����ʵĽڵ㣬���������Ϊ��Ծ״̬������Ŀ������k�ȸ����о������Э���Ǹ�������Э��CCP[7-8]���������ýڵ�ľֲ�λ����Ϣ�Խڵ��Ƿ����㸲��Ҫ���ְ�ܺϸ����жϣ�ְ�ܺϸ��߽�תΪ��Ծ״̬�������ϸ��߽�תΪ˯��״̬��������Hall��ѧ�ߵĸ�������[12]�������һ������VORONOIͼ�����������жϽڵ��Ƿ�����ķ������������ҵ��ڵ�ĸ���Բ��֮��Ľ��㣬�Լ���Щ����Բ�������粿������ı߽�Ľ��㣻Ȼ�������Щ�����Ƿ�λ�ڽڵ�ĸ���Բ�ܷ�Χ�ڣ������Щ���㶼���ٱ�һ������Բ�̸��ǣ���ô�������粿������ͱ���ȫ�����ˡ������Щ���㶼���ٱ�k������Բ�̸��ǣ���ô�������粿�������ڵ�k�ȸ��ǡ����ǣ��ڵ�ֻ�ܺϸ����ж��㷨���б�ڵ��Ƿ�����ĸ��Ӷȴﵽ��O(N3)�������е�[12]��k����������ת��ΪĿ������������������k�ȸ��Ǽ������⣬�����1���Ա�֤k�ȸ���ΪĿ��ļ���ʽ�ڵ���Ȳ��ԣ�����ʱ���ִΣ��㷨�Էֲ�ʽ��ʽȷ���ڵ��״̬��Bejerano��Լ�������Ƕ����Ķ��ظ������⣬�ڲ������ڵ�ֲ�λ����Ϣ�������£�����˾�ȷ��k������֤�����������ܹ�ʵ�ֶԲ�ͬ�ߴ�ĸ��Ƕ���ȷ���[4]��
2 ��������������
2.1 ����ģ��
�ּ��������������������
1) �������ڵ��������ʽ������Ŀ������
2) �ڵ��ڲ�����ܹ���ȡ������λ����Ϣ���ڵ�λ����Ϣ�ɽ����ڵ��ĵ�GPS[13]��������λ����[14]��á�
3) �ڵ����Բ�̸�֪ģ�ͣ����ڵ�ĸ�֪��Χ����������λ��ΪԲ�ģ��뾶ΪRs��Բ�η������Rs��Ϊ�ڵ�ĸ�֪�뾶��Rs�ɴ��������������Ծ�����
4) �ڵ�IJ����ܶȽϸߣ�������ͨ���ǽڵ����Ų�������µ�2~3����
2.2 ��ض���
Ϊ�˱����淶����������������ʽ���塣
����1 ���ǣ��ڶ�άƽ���ϣ�Ŀ������������һ����ڵ����С����С��Rs����Ŀ�����ڵ㸲�ǡ�
����2 k�ȸ��ǣ��ڶ�άƽ���ϣ�Ŀ������������һ��ͬʱ��k����Ծ�ڵ�����֪����Ŀ�����ڵ�k�ȸ��ǡ�
����3 ���������ڣ������������������п�ʼ��ֱ������ijһ�����Ŀ�겻�ܱ��κβ���Ľڵ�����⸲�ǣ����ʱ��γ�Ϊ���������ڡ�
����ʹ��1����Ϊ����������(Reuleaux triangle)�ļ���ͼ�ε��������б�Ŀ������ĸ��dz̶ȣ�������ʽ�������£�
����4 ���������Σ��Եȱ�������3������ΪԲ�ģ�����߳�Ϊ�뾶��Բ�����γɵ�3��Բ�ܵĽ�������Ϊ���������Ρ�����״Ϊ��ͼ2��ʾ�Ļ�ɫ����
���ݶ����֪��������������1���̶����ȵ�����ͼ����1���ȱ�������Ϊ����������������������1�㵽��ߵľ�������������ڽӵȱ������εı߳������ϵ�ÿ���㵽��Ӧ����ľ��붼����ȵġ�
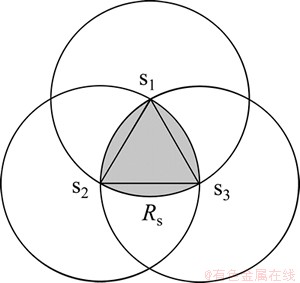
ͼ2 ����������
Fig. 2 Reuleaux triangle
2.3 ����k�ȸ�������������
Ϊ�˸���ֱ����Ч���жϲ���Ľڵ��Ŀ������ĸ��dz̶ȣ�����ʹ�����������εļ����������и��dz̶��ж�������Ҫʵ��˼�����������ʼ����ɺ�����Helly����[15]���ж�Ŀ���Ƿڵ�k�ȸ��ǡ�
����1 Helly�������ٶ�X1, X2, ��, Xn��Rd��1�������Ӽ��ϣ�����n��d���������n���Ӽ���������d+1���Ӽ��Ľ�����Ϊ�գ���ô�����������1���ǿս������� ��Rd��ʾdάʵ������
��Rd��ʾdάʵ������
ͼ3 Helly�����ڶ�άƽ���һ��Ӧ��ʾ��
Fig. 3 A demonstration of Helly theorem in 2-D plane
���ݶ���1����k��3�������£����ҽ�����k������ͼ���е�����3���Ľ�����Ϊ��ʱ����k������ͼ�����γɵĽ�����1���ǿռ��ϡ�ͼ3��ʾΪHelly�����ڶ�άƽ���ϵ�1��ʾ��������ʾ��n=5��d=3�����¸�������ͼ���ཻ���γɵĹ�������(����)����������������εļ������ʺͶ���1�����Եõ������ж�Ŀ�������Ŀ���Ƿڵ�k�ȸ��ǵij��������
����1����k��3�������£�������һ�����������������ڴ���k�����ڻ�Ծ״̬�Ľڵ㣬����������������ڵ�k�ȸ��ǡ�
֤�����������������εļ��ζ��壬�������������ڵ�����1�㵽����������������αߵľ��붼�����ڸ����������εı߳������ڵ������ͬ�ĸ�֪�뾶������ڸ������������ڴ���k�����ڻ�Ծ״̬�Ľڵ㣬����k���ڵ��е���һ���ڵ㵽�����������αߵľ��붼�����ڽڵ�ĸ�֪�뾶���������������α��ڵ�k�ȸ��ǡ���ˣ�����1���۳�����֤�ϡ�
��ʵ���������ʽ����ڵ�������£��ѽڵ㲿�����ֳ��������ڵ����������ζ���Ŀ��ĸ��Ƕ��ж��DZȽ����ѵģ���ˣ����IJ�������ķ�����������Ƚ�1���ڵ�ĸ�ӦԲ�ܻ��ֳ�6����ȵ�����������ͼ4(a)��ʾ��ÿ�����ΰ���1��������2����������Բ���Ľ������ɵ������2�������γɵĵȱ������Σ���ÿ���ȱ��������Ϲ������Ӧ�����������Σ���������2�����ڵ����������εĽ����γ�1��˫Բ��������ͼ4(b)��ʾ��Ȼ����Դ�˫Բ����������жϽڵ������ĸ��������
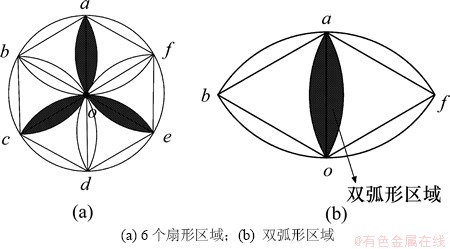
ͼ4 2�������������������ɵ�˫��������
Fig. 4 A 2-arch area formed by two adjacent Reuleaux triangles
����2����k��3�������£�����ھ�����ͬ�����ױߵ�2���������������γɵ�˫���������ڴ���k����Ծ�ڵ㣬��ô����2�����ڵ��������������ڵ�k�ȸ��ǡ�
֤������˫������������2�����������εĹ�������������1 ֪��˫����������һ�������2�����������α��ϵ�����1�㶼��������߳�������2����������������ȵģ���ˣ������˫���������ڴ���k����Ծ�ڵ㣬��ô��2�����������ζ��ܱ���k���ڵ㸲�ǡ�֤�ϡ�
��������1������2����������ж�1�������Ƿڵ�k�ȸ��ǵij��������
����2����k��3�������£�����һ��Ŀ��������������ڵ�����һ�����������������ڽӵ��������������γɵ�˫���������ڴ���k����Ծ�ڵ㣬������������ֱ�߱߳���ڵ�ĸ�֪�뾶��ȣ���ô������ڵ�k�ȸ��ǡ�
֤�����ٶ��������ֳ����ɴ�С��������ڵĵȱ������Σ���߳���ڵ�ĸ�Ӧ�뾶��С��ȣ��������Щ�ȱ�����������������������μ������ڵ��������������γɵ�˫���������ڴ���k����Ծ�ڵ㣬������2֪����2�������������������ڵ�k�ȸ��ǡ�ͬ�����������˫����������k����Ծ�ڵ㣬��ô��Щ˫�������ڵ�2������������Ҳ���ڵ�k�ȸ��ǣ���ˣ����۳�����֤�ϡ�
Ϊ��ȷ���ڵ�֮�����ͨ�ԣ������������3������ӳ�˱�֤���縲�ǵ������£�ʵ������ڵ�֮���ͨ����ͨ���ڵ�ͨ�Ű뾶���Ӧ�뾶Ӧ�������Լ��������
����3����1��Ŀ�����ڵ���ȫ���ǵ������£�����������ڵ��ͨ�Ű뾶Rc�����Ӧ�뾶Rs�ı�ֵ����Rc/Rs�� ����ô��ȷ��Ŀ�������еĴ������ڵ�֮�������ͨ�ġ�
����ô��ȷ��Ŀ�������еĴ������ڵ�֮�������ͨ�ġ�
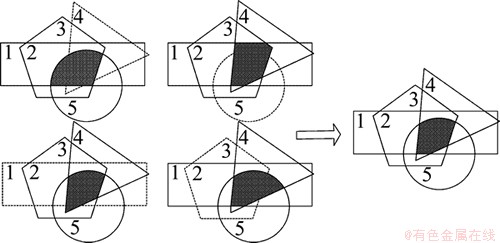
֤����Ҫʵ�ִ������ڵ�֮���ܹ��ͨ�ţ��ڱ�֤�ڵ���ȫ����Ŀ������������£�ֻ��Ҫ�ڵ��ͨ�Ű뾶���ڻ�������ڽڵ�֮�������Сֵ�����е����ֵ����ͼ5��ʾ���ڵ�a, b��c�ĸ�ӦԲ���ཻ��o�㣬abc�����1���ȱ������Σ�ao֮�������ڽڵ��Ӧ�뾶Rs�����ڽڵ�֮������ǽڵ�ĸ�Ӧ�뾶ֵ�����������ڴ�����������ڽڵ�֮����С��������������ˣ��������ڵ��ͨ�Ű뾶Rc�����Ӧ�뾶Rs�ı�ֵ����Rc/Rs������ȷ����ȫ���������еĽڵ�֮�������ͨ�ġ�֤�ϡ�
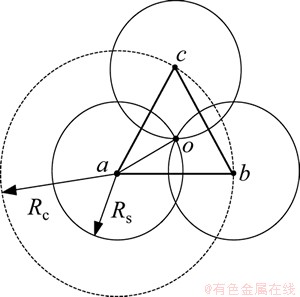
ͼ5 ��άƽ���Ͻڵ����Ÿ���ʾ��
Fig. 5 Demonstration for the optimal coverage in 2-D plane
�ɶ���3��֪��ֻҪ�ڵ��ͨ�Ű뾶���Ӧ�뾶�������������ϵ��������ȷ������ڵ�֮�����ͨ�ԣ�ҲΪ�����㷨������ṩ����ͨ�Ա�֤��
3 �������������εĶ��ظ����㷨
���ڴ�����������һ���������������磬Ϊ�����������������Ч�ʣ����������һ�ֻ������������εĸ����㷨RTC���������Ƚ��ܽڵ�״̬���Ȳ��ԣ���θ���RTC�㷨����Ҫʵ��˼���ִ�в��裻�������㷨α���������������ܷ�����
3.1 �ڵ�״̬���Ȳ���
3.1.1 �ڵ�״̬����˼��
���������ʱ�䰴ʱ�䡰�֡����֣�ÿ��ʱ�����ַ�Ϊ2���Σ�״̬�����κ����Ρ���ÿ��ʱ�䡰�֡��Ŀ�ʼʱ�̣��ڵ㱻���ѽ�����״̬��������״̬�Ľڵ��������һ���˱�ʱ���ھ�����Ծ�ڵ�ɹ�����������Լ���һ��״̬�����ɹ���������Ծ״̬�����������ȴ�״̬�������нڵ㶼�����˻�Ծ��˯��״̬֮�ڵ�״̬����������Ȼ��������빤���Σ��ڴ˽��нڵ�ά���Լ�״̬���䣬ֱ������ʱ�䡰�֡�������
��ÿһ��ʱ�䡰�֡���ʼʱ��ȫ���ڵ㶼��һ������pѡ���Լ���Ϊ��Ծ�ڵ㣬�������ɹ�����ڵ�����Ծ״̬��ͨ������RTC�㷨������Χ�Ľڵ������Ӧ״̬���������縲�Ƕ�Ҫ��
3.1.2 ״̬ת������
�ڵ㹤��������4��״̬֮һ����(ready)���ȴ�(waiting)����Ծ(active)��˯��(sleeping)���ڵ㲻ͬ״̬֮���ת��������ͼ6��ʾ��
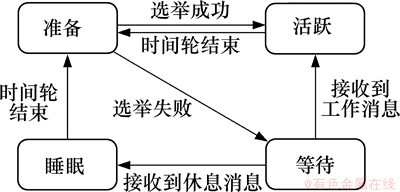
ͼ6 �ڵ㲻ͬ״̬ת����ϵͼ
Fig. 6 Node state transition diagram
��״̬����ÿһ��ʱ�䡰�֡���ʼʱ���ڵ㴦����״̬��Ȼ��ڵ���һ������pѡ���Լ���Ϊ��Ծ�ڵ㣬��ѡ�ٳɹ�����ڵ�����Ծ״̬������ת��ȴ�״̬��
�ȴ�״̬������ʧ�ܵĽڵ�ת��ȴ�״̬�������ڳ�ʼʱ����ڳɹ����յ��ھӽڵ㷢�͵�On-duty(����)��Ϣ���������ڵ��ڱ��ر����״̬��Ϣ��Ȼ������Ծ״̬���Ŀ������
��Ծ״̬���ڽڵ㾺������ʱ�ɹ��Ľڵ�����Ծ״̬��ͨ������RTC�㷨�ж����֪�����ڻ�Ծ״̬�Ľڵ��Ƿ����㸲��Ҫ���������㣬����On-duty��Ϣ���ȴ��ڵȴ�״̬�Ľڵ�����Ծ״̬���������縲�Ƕ�Ҫ��
˯��״̬���������ڵ�رղ���Ҫ��ģ�飬��ʡ�������ġ���1��ʱ�䡰�֡������ڵ�תΪ��״̬��
3.2 �㷨˼���ʵ�ֲ���
�ڵ��������ʽ����Ŀ��������ڳ�ʼ״̬�£����ѡ��һ���ֽڵ㴦�ڻ�Ծ״̬������ڵ㴦�ڵȴ�״̬�����ڻ�Ծ״̬�Ľڵ�����RTC�㷨���㷨���Ƚ�ÿ���ڵ�ĸ�ӦԲ�ܻ��ֳ�6����С��ȵ����Σ�Ȼ��ÿ2�����ڵ����ι����1��˫���������ݶ���2���ڵ������ж����֪Բ��������3��˫���������Ƿڵ�k�ȸ��ǣ���������Щ�ڵ��ʣ��������С�����Ƚ�λ�����˫���������ڵ�ʣ�������ߵĽڵ�ת���Ծ״̬����ʵ��k�ȸ��Ǹýڵ�ĸ�Ӧ����
�������������ܵ�RTC�㷨��˼�룬����Ҫʵ�ֲ�������������
��1������ÿ��ʱ�䡰�֡���״̬�����ο�ʼʱ���ڵ㴦����״̬��Ȼ��ڵ���1������pѡ���Լ���Ϊ��Ծ�ڵ㣬��ѡ�ٳɹ���������Ծ״̬������ת��ȴ�״̬��
��2�������ڻ�Ծ״̬�ڵ�Si�����֪Բ�ܻ���Ϊ6����С��ȵ���������Ϊÿ�����ι���1�����������Σ�Ȼ��ÿ2�����ڵ����������εĽ���������һ��˫�������������ڵ��֪Բ�����ֳ�6��˫��������(lens[0, ��, 5])����ͼ4(a)��ʾ��
��3�������ݶ���2�����ζԽڵ�����3��˫����������и��Ƕ��жϣ�������3�������
1) ���˫���������ڴ��ڻ�Ծ״̬�Ľڵ���������k-1����˵��������Ƕȴ���Ҫ��ĸ��Ƕȣ���ڵ�Si����Off-duty��Ϣ������ʣ��������ʣ������С�����ڻ�Ծ״̬������ڵ�ת��˯��״̬��Ȼ��ת����5����
2) ���˫���������ڴ��ڻ�Ծ״̬�Ľڵ�����С��k-1����˵���������δ�ﵽk�ȸ���Ҫ��ת����4����
3) ���˫���������ڴ��ڻ�Ծ״̬�Ľڵ�����Ϊk-1����˵���������ﵽk�ȸ���Ҫ��ת����5����
��4�����ڵ�Si��û�дﵽk�ȸ���Ҫ���˫���������ڴ��ڵȴ�״̬�Ľڵ㣬������ʣ����������Ҫת���Ծ״̬�Ľڵ���������On-duty��Ϣ���ڵ��յ�����Ϣ��ת���Ծ״̬��
��5������״̬�����ν���ʱ����������״̬�Ľڵ�û���κ�״̬������Ϣ�������Զ�ת��˯��״̬��
3.3 �㷨α��������
RTC()
Input: ��Ծ�ڵ㼯��S={s0, s1,��, sm}��״̬�������˱�ʱ��tm�����Ƕ�k��
Output: �ڵ����Ϊ�ȶ���״̬(��Ծ��˯��);
1. { CL �� NULL; /*Initial phase*/
2. i, j,k �� 0;
3. While ( i <= N)
4. {  ;/*��Ա�ڵ�������֪��Ԫ��Ŀ��ĸ���ӳ��*/
;/*��Ա�ڵ�������֪��Ԫ��Ŀ��ĸ���ӳ��*/
5. }/*end while* /
6. While ( tw > 0) /*��ͷ�ڵ��ռ���Ա�ڵ㷢�͵�mCOVER��Ϣ*/
7. { If (��ͷ�ڵ��յ�mCOVER��Ϣ)
8. { CL[j].data ��mCOVER; /* ��ͷ�ڵ�洢�յ�����Ϣ */
9. j++;
10. }
11. }/*end while*/
12. Sort(CL[j].data); /*����Ei�ͦ�i��CL�ɸߵ�������*/
13. While ( j < i) /*��ͷ�������Ÿ��Ǽ�*/
14. { If (Ej >= Ethr)
15. { ��ͷ����mNOTICE��Ϣ����Ա�ڵ�;
16. ��Ա�ڵ������Ӧ�ĸ�Ӧ��Ԫȥ����Ŀ��;
17. }/*end if*/
18. k �� j;
19. While (k < i) /*ɾ���ظ����Ǽ�¼*/
20. { If (CL[k].data������CL[j].data��)
21. {���ظ�������ϢCL[k].data��CL��ɾ��;
22. }/*end if*/
23. j++;
24. }/*end while*/
25. j++;
26. }/*end while*/
27. }
�����ڳ�ʼ�������ν�ÿ�����ڻ�Ծ״̬�Ľڵ��ӦԲ���ֳ�6����ȵ����Σ�ʱ�临�Ӷ�ΪO(n)����ÿ���ڵ��˫��������ĸ����жϴ���ѭ������ΪM�Σ����нڵ�ĵ�������ΪM��n����MΪ��������ˣ������RTC�㷨ʱ�临�Ӷ�ΪO(n)��
4 ʵ�����������
Ϊ�����۱�������RTC�㷨�����ܣ�����ʹ��C++�����ʵ�������RTC�㷨��CCP�㷨[6]�ڲ�ͬ���۱��µ����ܽ��жԱȡ�
4.1 ʵ����������۱�
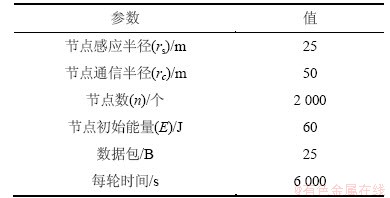
��ʵ���У��������ڵ㱻��������ڵ�400 m��400 mĿ�����ڵ��ܺIJ�������[16]��������ܺ�ģ�ͣ����ܺķֱ�����Ϊ��ET-elec=50 nJ/bit��ER-elec=100 nJ/bit����fs=10 pJ/(bit��m2)������ʵ�黷�������������1��ʾ��
ʵ��ֱ�Ӳ�ͬ�������ģ��Ŀ�����ǶȻ����£�ͨ���ԱȻ�Ծ�ڵ�����������ʣ����������RTC�㷨�����ܣ����ԱȲ�ͬ�Ľڵ��ʼѡ�ٸ���pֵ�����縲�Ƕȵ�Ӱ�졣
��1 ʵ�����ֵ
Table 1 Simulation parameters
4.2 ʵ���������
4.2.1 ��Ծ�ڵ������Ա�
ͼ7��ʾΪ��ͬ���縲�Ƕ��»�Ծ�ڵ������Աȹ�ϵ����ͼ7���Կ������������縲�Ƕȵ���ߣ������л�Ծ�ڵ������������ӡ�ͨ����CCP�㷨�Ƚϣ�RTC�㷨���ȴ��ڻ�Ծ״̬�ڵ������Ҫ��CCP�㷨���٣���Ծ�ڵ�������ģ���ٵı�������Ϊ15%����ȷ������3�ȸ��ǵ������£�2���㷨�´��ڻ�Ծ״̬�Ľڵ����������������縲�Ƕȵ���ߣ�2���㷨�´��ڻ�Ծ״̬�Ľڵ��������������˵��RTC�㷨�ڱ�֤���縲�Ƕȵ������£����ܹ���Ч������ж����縲�Ƕȵ�ȷ�ԣ��Ӷ����ȸ��ٵĴ������ڵ㴦�ڻ�Ծ״̬��
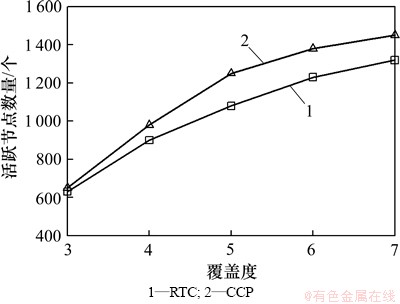
ͼ7 ��ͬ���縲�Ƕ��»�Ծ�ڵ������Ա�
Fig. 7 Comparison of number of sensor in active under different coverage degrees
4.2.2 ����ʣ�������Ա�
ͼ8��ʾΪ���Ƕ�k=3��k=4����������ʣ��������ʱ��仯��ϵ����ͼ8���Կ����������е������ܵ�ʣ������������������ʱ�����Ӷ����٣���CCP�㷨��ȣ�RTC�㷨��ȷ������ȵ�Ҫ�����ĵ��������٣�����Ҫԭ����RTC�㷨���б����縲�Ƕȼ��㿪����С�����������������ڼ䣬RTC�㷨����������ʹ��Ч��ƽ�����20%��
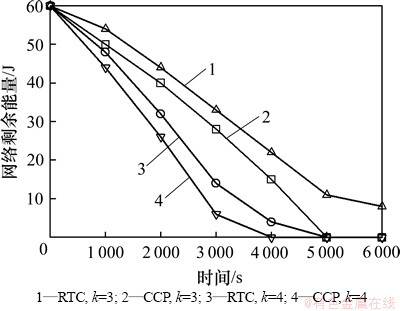
ͼ8 ����ʣ��������ʱ��仯�Ա�
Fig. 8 Comparison of residual energy of network
4.2.3 pֵ�ڵ�Ը��Ƕ�Ӱ��
ͼ9��ʾΪ�ڵ�״̬�����ο�ʼʱ�����ò�ͬ�Ľڵ��ʼѡ�ٸ���p��ʵ��������ظ��dzɹ��ʵ�Ӱ�졣��ͼ9���Կ���������p�����ӣ�����Ľڵ��ܹ��ﵽ��Ҫ�Ƕȵijɹ���Ҳ���ӣ������ӵ��ٶȽ�������ԭ���������д��ڵȴ�״̬�Ľڵ������ϴ�ͬʱ��ͨ���ԱȲ�ͬp���ߣ����Է����ڽڵ��ܶȽϵ�ʱ(�ڵ���С��800)��ѡ��pΪ0.3�Ϻ��ʣ����ڽڵ��ܶȽϸ�ʱ��ѡ��pΪ0.2�Ϻ��ʣ���ʵ����������ָ���û��ڳ�ʼ�ζ�p�����á�
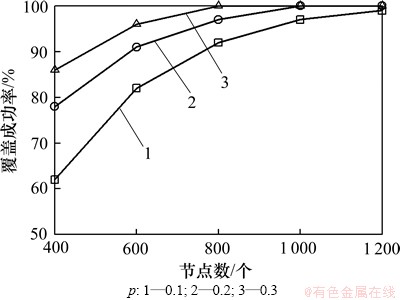
ͼ9 p�Ը��dzɹ��ʵ�Ӱ��(k=3)
Fig. 9 Comparison of coverage success ratio with different p
5 ����
1) ������ߴ���������Ķ��ظ������⣬�����һ���������������εĶ��ظ��ǿ����㷨��
2) ���㷨���ýڵ�ֲ�λ����Ϣ��ͨ���ڽڵ��ӦԲ���Ϲ������������ν����ж�����ĸ��Ƕ����������������ڵ��ʣ������������������нڵ�״̬���ȣ�����߽ڵ���������Ч�ʡ�
3) RTC�㷨��ȷ�����縲���������������ܹ���Ч�ؼ��ٻ�Ծ�ڵ�����������������������Ч�ʣ��Ӷ��ӳ�����������ڡ�
4) ���������㷨�ڽ�һ������չ��������ڽ���칹����������Ķ��ظ��ǡ�
�ο����ף�
[1] Akyildiz I, Su W, Sankarasubramaniam Y, et al. A survey on sensor networks[J]. IEEE Communications magazine, 2002, 40(8): 102-114.
[2] ���Ʒ�, ������, ������. ���ߴ�����������һ�ֻ��ڽڵ����еĸ����㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(7): 2028-2033.
NING Feifei, WANG Guojun, XING Xiaofei. Coverage algorithm with node sequences in wireless sensor networks[J]. Journal of Central South University (Science and Technology), 2011, 42(7): 2028-2033.
[3] Ammari H. CSI: An energy-aware cover-sense-inform framework for k-covered wireless sensor networks[J]. IEEE Transactions on Parallel and Distributed Systems, 2012, 23(4): 651-658.
[4] Bejerano Y. Coverage verification without location information[J]. IEEE Transactions on Mobile Computing, 2012, 11(4): 631-643.
[5] Xing X, Wang G. Wu J, et al. Square region-based coverage and connectivity probability model in wireless sensor networks[C]// Proceedings of CollaborateCom. Washington D.C., 2009: 1-8.
[6] Ashouri M, Zali Z, Mousavi S, et al. New optimal solution to disjoint set k-coverage for lifetime extension in wireless sensor networks[J]. IET Wireless Sensor Systems, 2012, 2(1): 31-39.
[7] Wang X, Xing G, Zhang Y, et al. Integrated coverage and connectivity configuration in wireless sensor networks[C]// Proceedings of SenSys. Los Angeles, CA, 2003: 28-39.
[8] Xing G, Wang X, Zhang Y, et al. Integrated coverage and connectivity configuration for energy conservation in sensor networks[J]. ACM Transactions on Sensor Networks, 2005, 1(1): 36-72.
[9] Ammari H, Das S. Centralized and clustered k-coverage protocols for wireless sensor networks[J]. IEEE Transactions on Computers, 2012, 61(1): 118-133.
[10] ½����, ���Ԫ. ���ߴ�����������С���Ǽ���̰�������㷨[J]. ����ѧ��, 2010, 21(10): 2656-2665.
LU Kezhong, SUN Hongyuan. Greedy approximation algorithm of minimum cover set in wireless sensor networks[J]. Chinese Journal of Software, 2010, 21(10): 2656-2665.
[11] Hall P. Introduction to the theory of coverage processes[J]. Technometrics, 1998, 32(2): 237-238.
[12] ������, ����, ��÷, ��. ����k���DZ�֤���칹����������ڵ���Ȳ���[J]. ������ͨ��ѧѧ��, 2008, 42(8): 940-945.
WANG Huanzhao, DONG Bei, LUO Hanmei, et al. Node scheduling strategy based on k-coverage guarantee for heterogeneous wireless sensor networks[J]. Journal of Xi��an Jiaotong University, 2008, 42(8): 940-945.
[13] Buchli B, Sutton F, Beutel J. GPS-equipped wireless sensor network node for high-accuracy positioning applications[C]// Proceedings of EWSN 2012. Trento, Italy, LNCS 7158, 2012: 335-348.
[14] Zhou Z, Peng Z, Cui J, et al. Scalable localization with mobility prediction for underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2011, 10(3): 335-348.
[15] Bollobas B. Intersecting convex sets: Helly��s theorem[M]. The Art of Mathematics: Coffee Time in Memphis, Cambridge University Press, 2006: 90-91.
[16] Heinzelman W, Chandrakasan A, Balakrishnan H. An application specific protocol architecture for wireless microsensor networks[J]. IEEE Transactions on Wireless Communications, 2002, 1(4): 660-670.
(�༭ ���˱�)
�ո����ڣ�2013-12-15�������ڣ�2014-03-15
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61272496)��NSFC-�㶫���ϻ���������Ŀ(U1135002)���й���ʿ���ѧ����������Ŀ(2014M562153)�������н��������ѧ����������Ŀ(10A033D) (Project(61272496) supported by National Natural Science Foundation of China; Project(U1135002) supported by the NSFC-Guangdong Union Foundation of China; Project(2014M562153) supported by China Postdoctoral Science Foundation; Project(10A033D) supported by Yangcheng Scholars Foundation of Guangzhou Education Bureau)
ͨ�����ߣ�������(1979-)���У����ϵ����ˣ���ʿ����ʦ�����´����������о����绰��020-39366925��E-mail: xxfcsu@gmail.com
ժҪ��������縲���������һ���������������μ�����������Ŀ�����Ƕȵ��жϷ��������ڴ˻��������k�ȸ����㷨(Reuleaux triangle-based k-coverage algorithm, RTC)�����㷨���Ȱ�ÿ���������ڵ�ĸ�֪Բ���ֳ�6����ȵ����������������������жϸ������Ƿ�ﵽ�û������縲�Ƕȵ�Ҫ��Ȼ�������Ӧ�ڵ�����Ծ״̬ʵ�ֶ�Ŀ�������k�ȸ��ǡ�ʵ����������RTC�㷨�ڱ�֤���縲�������������ܹ���Ч�ؽ��ͻ�Ծ�ڵ�����������������������Ч�ʣ��Ӷ��ӳ����������ڡ�
