
�༶������������������ϵͳ�Ĺ��������
���]��л�ְأ��ƕP
(���ϴ�ѧ �Ṥ�����Ƚ����ƽ������ص�ʵ���� ϵͳ�����о��������� ������214122)
ժ Ҫ��
���������������ɢʱ���������ϵͳ��״̬����������ơ����ȣ��������ж�����������������ϵͳ��ģ���Լ�������ģ�ͣ�ͨ���Թ������ϵͳ�ķ��������н����Ժ����Է������ó���ؽ��ۡ��ڴ˻����ϣ���Ը�����ϵͳģ�������һ����̬��״̬���������Ա�֤ϵͳ�Ĺ��������С�����ַ���ʵ������������ƵĹ�������Ч����
�ؼ��ʣ�
��������������������ϵͳ����������
��ͼ����ţ�TP275 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0333-06
Estimator design of networked control systems with multi-quantized output feedback
LIU Jun, XIE Lin-bo, HUANG Fang
(Institute of System Engineering, Key Laboratory of Advanced Process Control for Light Industry of Ministry of Education, Jiangnan University, Wuxi 214122, China)
Abstract: The estimator design of discrete-time networked control systems with multi-quantized output feedback is concerned. First, the system model and the estimate model of multi-quantized network control system with two quantizers are given, respectively. Then the asymptotic invariance of the covariance matrix about the estimation error system is studied, and some corresponding conclusions are obtained. The estimator error is made minimum by the designed state estimator. At last, a numerical example is given to illustrate the effectiveness of the estimator.
Key words: quantized output feedback; networked control systems; estimator
�ھ������ϵͳ�У��ź��Dz������κδ���ֱ�ӽ��д���ġ�Ȼ�����������ϵͳ�У���Ϣ����������Լ��ŵ�����ͨ�����ܵ����Ƶġ���ˣ����źŽ������紫��ͨ��֮ǰ�������������������������������Խ��ͳɱ���������Ϣ�������ұ���ϵͳ����չ�ͼ��[1-3]�����ǣ���Щ����ϵͳ��״̬�źŲ���ֱ�ӵõ������ԣ�����״̬��������ϵͳ״̬���м����Ե÷dz���Ҫ�������ǻ����ź�������״̬���Ƹ���������������ϵͳ�еĹؼ����֡��������绯�Ŀ��ٷ�չ��������������Ҳ��Ϊ���������ϵͳ�е�һ����Ҫ����[4-7]���������ִ��������ϵͳԽ��Խ���ӣ�ͨ��������������������м�������DZ�Ȼ�ķ�չ���ơ������Ҫ״̬�������ܹ���ʱ��ȷ�ķ�Ӧϵͳ��״ֵ̬�����������������ȶ��ԺͰ�ȫ��������Ҫ���塣Ŀǰ�Ѿ�������ѧ������ʶ����Ҳ�õ��������о��ɹ�[8-11]��
���͵��������������õ�����������Ϊ2�ࣺ�����������Ͷ�����������ͨ��������������Ч�����ھ�����������Ч�������IJ��ö������������������������ܹ����������������������ʹ����������ֵ�Ĵ�С���������������ܹ��������ȷ���ƣ��ܹ��нϵؼ�С����������ʹ�������������Ǻ㶨�ġ����Ƕ����������õ��㷺Ӧ�õ�һ���dz���Ҫ��ԭ���ö�������������һ���ŵ������������Ĵ����dz��Թ�ϵ�����Ǽ��Թ�ϵ����һЩ�����������߶����Ĵ���Ҳ�dz��Թ�ϵ�ģ������ö�������������Щ�ź�ʵʩ����ʱ�ܹ����������Գ��Թ�ϵ���д��ݣ��������Ч�ؽ������źŴ��ݶ���ɵ�����ۼ����⣬��֤��Ϣ��ȷ�Ժ��ȶ���[12-17]��Ϊ�ˣ�����������Բ��ö����������Ķ༶�����������ϵͳ����״̬����������ơ����ȸ����������ϵͳ��״̬�ռ�ģ�ͼ��ṹ���о��������ϵͳ��Э�������������ԣ������ƹ������ϵͳ������״̬�������������������ַ����ʵ����
1 ��������
�����о�������ʽ����ɢʱ������ϵͳ��
![]() (1)
(1)
���У�![]() Ϊ״̬������
Ϊ״̬������![]() Ϊ��������������
��������������![]() ���������
���������![]() ����������
����������![]() ����������
����������![]() ��
��![]() �������صİ�
�������صİ�
�������䷽��ֱ�Ϊ![]() ��
��![]() �����Ҷ��κ�
�����Ҷ��κ�![]() ��������x0���������صġ�x0�ij�ʼֵ�н���״̬
��������x0���������صġ�x0�ij�ʼֵ�н���״̬![]() ����ֱ�ӵõ���A��B1��B2��C����Ӧά���ľ���(A, B1)�ɿ���(C, A)�ɹۡ�
����ֱ�ӵõ���A��B1��B2��C����Ӧά���ľ���(A, B1)�ɿ���(C, A)�ɹۡ�
���IJ��õ��������Ʒ����������ϵͳ�����¼�������ɣ�2��������Q1��Q2������Ϳ������������ŵ����������������Ʒ�������ϵͳ��ͼ1��ʾ����������ͼ2��ʾ��

ͼ1 ϵͳ�ṹͼ
Fig.1 System chart

ͼ2 ������ʾ��ͼ
Fig.2 Schematic diagram of quantizers
ѡ���������
 (2)
(2)
���У�![]() Ϊx(k)�Ĺ���ֵ��
Ϊx(k)�Ĺ���ֵ��![]() Ϊ����
����![]() ��
��![]() �Ĺ���ֵ��
�Ĺ���ֵ��![]() Ϊ��������ʹ��A-LC�ȶ���������ȡΪ
Ϊ��������ʹ��A-LC�ȶ���������ȡΪ![]() , ʹ��A+B1K�ȶ���
, ʹ��A+B1K�ȶ���
����״̬�������Ϊ![]() ����
����![]() ��ʾ������Q2����������Ԥ�����Ϊ��
��ʾ������Q2����������Ԥ�����Ϊ��
![]()
���У�![]() �����Ԥ��������ʽ�������ɱ�ʾʽ���Եõ��������ϵͳ����Ϊ��
�����Ԥ��������ʽ�������ɱ�ʾʽ���Եõ��������ϵͳ����Ϊ��
 (3)
(3)
��![]()
![]()
![]() ����ʽ(3)Ϊ
����ʽ(3)Ϊ
![]() (4)
(4)
���Ƶأ���������![]() ������ʽ(1)�ã�
������ʽ(1)�ã�
![]()
![]() (5)
(5)
��ʽ(4)��ʽ(5)�ɵ������ջ�ϵͳ��״̬�ռ�ģ��Ϊ��
 (6)
(6)
����![]()
![]() ������Q1��������
������Q1��������![]()
![]() ������Q2��������
������Q2��������
2 �����Է���
�����в���������ʽ������̬����������
���У�![]() ��ʾ�����ܶȣ�
��ʾ�����ܶȣ�![]() ��
��![]() ��ʾ�������ܼ��̶ȼ����������������������ͼ3��ʾ��
��ʾ�������ܼ��̶ȼ����������������������ͼ3��ʾ��
���ϵͳ(2)���������Ķ���![]()
![]() �ɽ����дΪ������ʽ��
�ɽ����дΪ������ʽ��
![]()
![]() (7)
(7)
����
![]() ��
��
����![]() ������������
������������![]() ��ͬ����ʽ(6)Ҳ��дΪ��
��ͬ����ʽ(6)Ҳ��дΪ��
![]()
![]() (8)
(8)
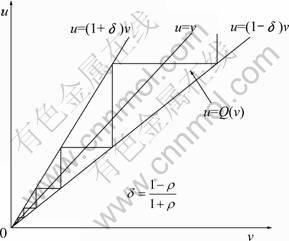
ͼ3 �����������������
Fig.3 Input-output features of quantizer
���� 1 �������e(k)��Ԥ������(k)�Լ��������d(k)���ǵľ�ֵ��Ϊ0��
����2 �����̬�������ϵͳ(7)�Ƕ����ȶ��ģ���ô��ϵͳ(8)Ҳ�Ƕ����ȶ��ģ����Ҵ���һ������![]() ��ʹ��
��ʹ��![]()
![]() ���������κβ�Ϊ0��
���������κβ�Ϊ0��![]() ������1������
������1������![]() ��ʹ�ã�
��ʹ�ã�
![]()
������
����1 ���ϵͳ(8)�����ȶ�����ô����e(k)��Э�������![]() ���н�ġ�
���н�ġ�
֤������������2�����Ҵ���������ʽ![]() ��
��![]() ������
������![]() ��һ��ȷ���ij�������ô������Lyapunov ����Ϊ������ʽ
��һ��ȷ���ij�������ô������Lyapunov ����Ϊ������ʽ![]() ����
����![]() ����
����

![]()
![]()
���������Dz���ʽ![]() ������ʽ���б任���ã�
������ʽ���б任���ã�
![]()
![]()
���У�m1��m2��m3Ϊȷ����ϵ������Ϊ��������������>0��ͨ�����ƿ��Եó����½��ۣ�

![]()
�ɴ˿��Եó�Э�������![]() �����Ͻ�ġ�
�����Ͻ�ġ�
������������һ�������Ժ���ʹ��E(k)�ļ���Ƚϸ��ӣ���ˣ�������ˮƽ�����ر�С������¸�������2�����������ټ�������
(1) �������d(k)��d2(k)��������e(k)�����ء�
(2) Ԥ������(k)�����ֵ�ĸ�˹�����䷽��Ϊ������
�Ӷ������������̿��Կ����������d(k)�ܵ���0��Ӱ�죬���ǣ��ڦѱȽ�Сʱ������Ӱ����Ա����ԡ�Ҳ����˵�����ڸ�����![]() ��
��![]() ��
��![]() �ǽ�����
�ǽ�����
�ȵġ�������һ��![]() ��
��![]() ��һ�����Ʋ���ֵ������[9]�и���һ�����Ƽ��㹫ʽ��
��һ�����Ʋ���ֵ������[9]�и���һ�����Ƽ��㹫ʽ�� ![]() ��
��
����![]() ��
��![]() ��
��![]() �ֱ�Ϊ��(k)��d(k)�ķ��
�ֱ�Ϊ��(k)��d(k)�ķ��
����e(k)�Ľ���Э�������![]() ���ڶ���1 ���Ѿ�����E(k)���Ͻ�ġ����潫��������e(k)�Ľ���Э����
���ڶ���1 ���Ѿ�����E(k)���Ͻ�ġ����潫��������e(k)�Ľ���Э����![]() �ļ��㡣���ø�����2��������
�ļ��㡣���ø�����2��������![]() �Ľ��Ƽ��㹫ʽ
�Ľ��Ƽ��㹫ʽ![]() �����Զ�E(k)���н��ƹ��ƣ�
�����Զ�E(k)���н��ƹ��ƣ�
![]()
![]() (9)
(9)
�õ�Lyapunov��ַ��̵�һ����ʽ��
![]()
![]()
����2 ���ϵͳ(2)�Ƕ����ȶ��ģ���ô����![]() ������
������![]() ����.
����.
֤����������[17]��֪������1������ ![]() ʹ��
ʹ��![]()
![]()
![]()
![]() ������
������
���У�![]() ����Ϊ
����Ϊ![]() ���ɴ˿��Եõ�
���ɴ˿��Եõ�![]() ��
��
�ɽ�![]() ��ʾΪ
��ʾΪ![]() ��
��![]()
![]() �����Ц�Ϊ���ڲ��������Ҵ���һ���㹻��Ħ�>0ʹ��
�����Ц�Ϊ���ڲ��������Ҵ���һ���㹻��Ħ�>0ʹ��![]() ���������
���������![]() ��
��
![]()
�ɴ˿��Եó�![]() ����
����
![]()
![]() (10)
(10)
��![]() �ɿ�����
�ɿ�����![]() ���Ͻ�.
���Ͻ�.
3 ����������L�����
ͨ�����Ϸ�����֪��Ҫ�õ����ŵĹ���Ч������ʹ����״ֵ̬�ȹ�ȷ�ĸ���״̬�źţ���Ҫ��֤�������ȡ����Сֵ��Ҳ����ʹ![]() ȡ����Сֵ���������۹���������L����ơ���ʽ(10)���Կ�������������Ƶ����ŵ�LӦ��ʹ��
ȡ����Сֵ���������۹���������L����ơ���ʽ(10)���Կ�������������Ƶ����ŵ�LӦ��ʹ��![]() ȡ��Сֵ��
ȡ��Сֵ��
����3�� ��![]() ʱ����ô
ʱ����ô![]() ��ȡ��Сֵ����ʱ
��ȡ��Сֵ����ʱ![]() Ҳ����Сֵ��
Ҳ����Сֵ��
![]()
![]()
![]()
֤������
![]()
![]()
չ���ɵã�
![]()
![]()
����ʽ�����䷽����ͬʱ���ø����ļ������������Եõ�������ʽ��

��![]() ʱ��
ʱ��![]() ȡ����Сֵ����ʱ��Lʹ�������
ȡ����Сֵ����ʱ��Lʹ�������![]() ȡ��Сֵ��Ҳ���ǹ������ܹ�ȷ�ظ���ϵͳ��״̬�źţ������ڶ�ϵͳ�ļ�ء�
ȡ��Сֵ��Ҳ���ǹ������ܹ�ȷ�ظ���ϵͳ��״̬�źţ������ڶ�ϵͳ�ļ�ء�
4 ����
���ĸ���һ�����ַ������������֤��ƵĹ�������Ӧ��Ч�����������µ�ϵͳģ�ͣ�
![]()
![]()
![]() �����ü������õķ����õ�������
�����ü������õķ����õ�������
����Ϊ![]() ��������ƵĹ�����
��������ƵĹ�����
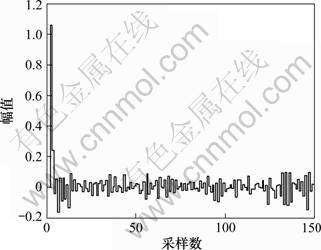
����![]() ���õ�״̬����ֵ�Լ��������ֵ�ķ�������ͼ4~6��ʾ��
���õ�״̬����ֵ�Լ��������ֵ�ķ�������ͼ4~6��ʾ��
��ͼ4~6���Կ�����������Ƶ�״̬�������ܹ�ȷ�ĸ���ϵͳ��״ֵ̬,���������ڵ������Ҳ�ܹ���֤���������ʼ���ڿ�������Χ�ڲ�����

![]()
![]() ͼ 4 ״̬�ź�
ͼ 4 ״̬�ź�
Fig.4 State signal
ͼ5 �۲����ź�
Fig.5 Observer signal

ͼ6 �۲�����ź�
Fig.6 Observation error signal
5 ����
���������ϵͳ��Ӧ��Խ��Խ�㷺���ִ����������ص�Ҫ��ҲԽ��Խ�ߣ���Ͷ�״̬��������ȷ������˸��ߵ�Ҫ������Ի�����������Ķ༶�����������ϵͳ������״̬����������ơ����ȣ���Զ༶�����������ϵͳ�Ĺ��������������Խ����˷������о����õ��˹�������Э������Ͻ硣���ţ�����ǰ���е���ؽ��۶�ϵͳ�Ĺ�������������ƣ���Ҫ˼������ϵͳ�ȶ���ǰ����ʹ��ϵͳ��״̬�������Ϊ��Сֵ������ʵ������������ƵĹ������ܹ���Ч�ؼ�С���������Լ������������� Ӱ�졣
�ο����ף�
[1] Fu M, Xie L. Finite-level quantized feedback control for linear systems[J]. IEEE Transactions on Automatic Control, 2009, 54(5): 1165-1170.
[2] Liberzon D. Hybrid feedback stabilization of systems with quantized signals[J]. Automatica, 2003, 39(9): 1543-1554.
[3] Brockett R, Liberzon D. Quantized feedback stabilization of linear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(7): 1279-1289.
[4] Walsh G, Beldiman O, Bushnell L. Asymptotic behavior of nonlinear networked control systems[J]. IEEE Transactions on Automatic Control, 2003, 48(9): 1526-1544.
[5] Wong W, Brockett R. Systems with finite communication bandwidth constraints ��: Stabilization with limited information feedback[J]. IEEE Transactions on Automatic Control, 1999, 44(5), 1049-1053.
[6] Elia N, Mitter S. Stabilization of linear systems with limited information[J]. IEEE Transactions on Automatic Control, 2001, 46(9): 1384-1400.
[7] Tatikonda S, Mitter S. Control under communication constraints[J]. IEEE Transactions on Automatic Control, 2004, 49(7): 1056-1068.
[8] Tatikonda S, Sahai A. Mitter S. Stochastic linear control over a communication channel[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1549-1561.
[9] Fu M, de Souza C. State estimation for linear discrete-time systems using quantized measurements[J]. Automatica, 2009, 45(12): 2937-2945.
[10] Hayakawa T, Ishii H, Tsumura K. Adaptive quantized control for linear uncertain discrete time systems[J]. Automatica, 2009, 45(3): 692-700.
[11] Vu L, Liberzon D. Stabilizing uncertain systems with dynamic quantization[C]//Proceedings of the 47th IEEE Conference on Decision and Control. Cancun, Mexico, 2008: 4681-4686.
[12] Zhai G, Matsumoto Y, Chen X, et al. Hybrid stabilization of linear time-invariant systems with two quantizers[C]//Proceedings of the 2004 IEEE International Symposium on Intelligent Control. Taipei, 2004: 305-309.
[13] Carli R, Fagnani F, Frasca P, et al. A probabilistic analysis of the average consensus algorithm with quantized communication[C]//Proceeding of 17th IFAC World Congress. Seoul, Korea, 2008: 8062-8067.
[14] Fu M, Xie L. The sector bound approach to quantized feedback control[J]. IEEE Transactions on Automatic Control, 2005, 50(11): 1698-1711.
[15] Zhou B, Duan G, Lam J. On the absolute stability approach to quantized feedback control[J]. Automatica, 2010, 46(2): 337-346.
[16] Gao H, Chen T. A new approach to quantized feedback control systems[J]. Automatica, 2008, 44(2): 534-542.
[17] de Souza C E, Xie L. On the discrete-time bounded real lemma with application in the characterization of static state feedback H�� controller[J]. Systems & Control Letters, 1992, 18: 61-71.
(�༭ ����ƽ)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(60804013)�������У��������ҵ���ר���ʽ�������Ŀ(JUSRP21011)
ͨ�����ߣ����] (1987-)���У����ճ����ˣ�˶ʿ�о��������������������Ƶȷ�����о����绰��15261579825��E-mail: evengold_lau@163.com
ժҪ���о��˻��ڶ༶���������������ɢʱ���������ϵͳ��״̬����������ơ����ȣ��������ж�����������������ϵͳ��ģ���Լ�������ģ�ͣ�ͨ���Թ������ϵͳ�ķ��������н����Ժ����Է������ó���ؽ��ۡ��ڴ˻����ϣ���Ը�����ϵͳģ�������һ����̬��״̬���������Ա�֤ϵͳ�Ĺ��������С�����ַ���ʵ������������ƵĹ�������Ч����
