

DOI�� 10.11817/j.issn.1672-7207.2021.04.028
�������ֵ����Ż��о���չ
��Ч��1������1��½����2����־��3
(1. �Ϻ�Ӧ�ü�����ѧ �����ͨѧԺ���Ϻ���201418��
2. ͬ�ô�ѧ ��������й����ͨ�о�Ժ���Ϻ���201804��
3. ��������ϣ����Ϣ�����ɷ�����˾��������100071)
ժ Ҫ��
�ֵ����Ż������о����������ּ�����δ�������״�����ڶ�������������������о��ܽᣬ�Ӷ������ֵ���ԭ������չ���̡��о��ɹ��Լ��о�����ȷ������ϵͳ���ɡ����ȣ��Զ������ֵķ�չ���̼����������������������ζ�̤����״�Ż���ת��ܽṹ�Ľ����������Ƶȶ������ֵ����Ż���������������ָ���ȶ��Ժ;������Ǿ����乤��Ӧ�õ���Ҫ���أ����Ե�����δ�����ܵķ�չ�������չ�������ڶԵ�һ�Ż��������������о���ͬʱ�����Ż�����������δ�������ơ�
�ؼ��ʣ�
��ͼ����ţ�U270.33 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2021��04-1316-11
Research progress of independent rotating wheels steering optimization
SUN��Xiaojie1, XU��Cong1, LU��Zhenggang2, XIA��Zhicheng3
(1. School of Railway Transportation, Shanghai Institute of Technology, Shanghai 201418, China;
2. Institute of Railway and Urban Rail Transit, Tongji University, Shanghai 201804, China;
3. Beijing Jinhongxidian Information Technology Co. Ltd., Beijing 100071, China)
Abstract: Due to the late start, independent rotating wheels(IRW) steering optimization technology in domestic are not yet mature. Based on review and summary of the literature and authors' own works, the steering principle, development process, research results and research direction were systematically summarized. Firstly, the development history and steering information requirements of independent rotating wheels were described. Secondly, the steering optimization methods, including wheel profile optimization, bogie structure improvement and active control were sorted out, and the stability and economy of methods were the key factors that determine its engineering application. Finally, the possible development direction of steering methods in the future was proposed. With the continuous in-depth study of single optimization, multiple optimization schemes is the way of future.
Key words: steering optimization; railway vehicle; independent rotating wheels
�����ֶԣ��ǽ���������ֽ��ʹ֮�ܹ��Բ�ͬת�����С�����Ӧ���з��֣�����ڴ�ͳ�����ֶԣ������ֶԲ��߱��Ե�������[1]�����⣬�����ֶ����й����У���Ե�᳤�������ֹ죬������ص��������ֹ�ĥ�ģ������ֶԵ��о���Ӧ��һ������ͣ��[2]��
20���ͺ��ڣ����Ÿ����г��Լ����й����ͨ�ķ�չ�����Ƕ��г����ٶ��Լ������ı���������˸��ߵ�Ҫ��1984�꣬��װ�����ֶԵ��ִ��͵ذ��й�糵�״���������Ͷ��ʹ�ã���������ʶ�������ֶ��ڹ����ͨ�������Խ�ԡ�FREDERICH��[3-6]����ѧ�Ƕ��о������ֶԵĵ���������Ƚ��˶����ֶ��봫ͳ�����ֶԵ����ܲ��졣�Դˣ������ֶԵ�����о��ܵ�ѧ�ߵĹ㷺��ע�������ֶԵ����Ż����о��ɹ�����ӿ�֡�
�ҹ����ڶ����ֶ��о�����������21���ͺ���ʼ���Ӷ����ֶԼ�������о������ҿƼ������������100%�͵ذ���쳵���ؼ��������ȿ��⣬�г����ͺ��ƿ͵��������ƵĶ��������й�糵�Ⱥ����ߣ���������������ȹ�[7]��DUKKIPATI��[8]�ܽ�ع˹�������ֶԵ����о������˺�����������о���չȱ�����Ƶ��ܽᡣ��ˣ��������������������Լ��о������Ļ����ϣ��������ܽ�����ֶԵ����Ż�����о����������������ֶԵ����Ż����о����ɹ�������δ�������ֶԵ����Ż��ķ�չ���ƣ�����������顣
1 �����ֶԵĵ�������
�����ֶ�����ֿ��Բ�ͬ�����У����ƺ�ҡͷ�˶�Ҳ������ϣ���ʹ���������们������Ϊ�㣬�����们�������Զ��ֶԲ�����������[9]�������ֶԳ����ھ�����ʵ�ֵ͵ذ塢���ٽ��ٶȺ��ױ�����ŵ��ͬʱ���ܵ���������������ƣ���ʹ��С�ĺ�����Ҳ��ʹ������һ��ֹ����У����ҹ�����ʱֻ��������Ե�Ӵ������������ϴ����Ե/̤��ĥ�ĺ����������������ѹ�ķ��ա���ˣ������߶����ֶԵĵ��������DZ�������о��ȵ㡣
���ڶ����ֶԵĵ����о���Ŀǰ���о�˼·���ܽ�Ϊ������
1) ��߳���������ԭ������Ҫ�����ڳ���̤�����ε��Ż���
2) �Ľ�ת��ܽṹ����Ҫ��Ϊ2�࣬һ�ǽ����ҳ���(��ǰ����)���������ʹ�������ƴ�ͳ�ֶԵĵ�������������ͨ��ij�ֻ�е�ṹ���泵�ֵ��˶���ʹ�������ھ���λ�á�
3) �ֶ��������ƣ������ֶԵ�״̬����ʩ�ӿ����������أ�ʵ���ֶ���������/�ȶ��Կ��ơ�
2 ̤�������Ż�
�����ֶ�̤�����ƣ������������ע̤���ĥ�����⣬��������Ƴ�ĥ���ȶ���̤�档ֱ��1978�꣬HELLER��[10]ϵͳ���о���̤����״�복�����е��ȶ��ԡ�����ͨ����֮���ì�ܹ�ϵ���˺����ѧ�������̤����״ʱ��ʼ��ע��Գ�������ѧ���ܵ�Ӱ�졣EICKHOFF��[11]���������о���̤��Զ����ֶԶ���ѧ���Ե�Ӱ�죬����չ���ֹ������֤��
ͼ1��ʾΪ�ֹ�Ӵ�����ͼ����ͼ1�ɼ������������̤����ֹ���ˮƽ������γ�һ���н�
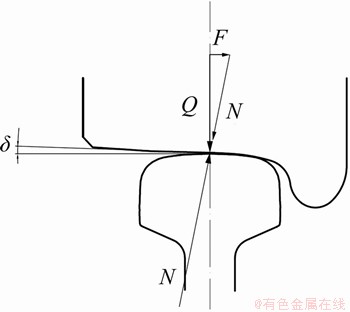
ͼ1���ֹ�Ӵ�����ͼ
Fig. 1��Wheel-rail contact force diagram

��ʽ(1)���Կ�������ƽ������


����������[13]��������2�ν��ж�������̤����ƵĽ������ͨ������������֤����Ч�ԣ������[14]���ڸ����ĸֹ����������ýӴ�����ϵķ������������̤�棻������[15]���������������о�����Ϲ���������һ�����Ͷ�������̤��(
KOMATSU��[18-19]������б��ڴ�ͳ��·���ֵķ���̤�����Σ�������Ե���ڸֹ���࣬��������һ�־����Ե��������Ķ����ֶԻ������Գ�������ѧ���ܺ�����������һ���ĸ��ơ�WANG[20]��������Ͻ�������չ�о���������ڵ����־�̬���Ե���Ʒ��������ؿ����˳������Ĺ켣���ֹ�Ӵ�Լ������ͨ��SIMPACK���嶯��ѧ���������˷�����֤��
KOYANAGI[21-22]��Ϊ̤������ǵ��³��ִ���Ҫԭ�ݴ������Բ���εĶ�������̤��ṹ������Ҫ��װ�����ĵ������(�����쵼��)����֤�������С����ַ�����Ȼ���Ա�֤�����ڸ��������µ��ȶ��ԣ�������������·��϶Ȳ��ߣ�����ι���������һ���ѵ㡣��ˣ�������ʵ���ҷ�Χ�ڵ�С�����顣
��������̤�������Ż�����ǵ����Ż����о�����֮һ��ͨ���Գ���̤�����εĺ�����ƣ��ܹ���Ч���Ż����ֵĵ����ԣ���߳�������ѧ���ܡ����Ľ�̤����ֶԵ�������������������һ�������ƣ�����Ч����������������ǣ������ĵ������������ų������С�ĥ�����Ӷ��ٴμ�������ˣ�ͨ���Ż�����̤�����������Եķ���һ����Ϊ��������ʹ�á�
3 ת��ܽṹ�Ľ�
�ֶ����ܵ�������ʱ�����˻��������λ�ƣ��������һ���ij�ǡ����������λ�����ֱ���������в����������们��������ʹ�ֶԷ������ƣ����ֺ��ƽ���������ԭ�����Ի���[23]����ˣ����˶Զ�������̤�������Ż�֮�⣬ѧ���ǻ�̽���˶Զ�������ת��ܵ��Ż��Ľ�����1��ʾΪһЩ���͵��Ż��Ľ�ת��ܼ��䵼��ԭ����
��1�������Ż��Ľ�ת��ܼ������
Table 1��Typical improved bogies and mechanisms

3.1�����ת���
3.1.1��������ϡ�
�������ת�����ָ���ֶ����Ҷ�����ת����֮�䣬ͨ���նȺ�����ı仯ʹ�ֶ�������ϣ��ڱ��ֶ����ֶ��ŵ��ǰ���£�ʹ���������ڴ�ͳ�ֶԵĵ���������
����˹ͨ��˾�����Ƶ�
ͼ2��
Fig.2��
LENG��[25]�о���һ�ֺ���Ħ������ֶԣ�ͨ��Ħ��ʽ���������������ҳ��ֵ���ϣ�ʹ��Ħ��ת�ضԶ����ֶԽ�����ϣ���������ֶԵĵ������ܣ��ܽܵ�[26]���Գ�ʽ�Ļ�е������Ӧ���ڶ��������ϣ�ʵ���˳��ֵı������ٿ��ƣ���Ч�ܵ�[27]���һ�ֵ�����ֶԣ�ͨ���������������ҳ��֣����е��ϵ�Ч�����ƣ��������㡢���á�
3.1.2��������ϡ�
�������ת��ܵĵ��ʹ�����������


ͼ3��
Fig. 3��
��ï���[30]����˶����ֶ����ת��ܵĸ�����ǽ�λ��ǰ����2�������ֶԵ���ת���ͨ��һ������Ԫ������������ʹ֮��Ϊһ������ת��ܡ�ͨ�����������������֣������ֶ����ת��ܵĵ��������Ϻã��ܹ�ʵ��ֱ���ϵ��Զ����������õ�����ͨ���ԡ�
����ڴ�ͳת��ܣ����ת����ڱ�֤�˶����ֶ��ŵ��ͬʱ���ܹ�ʹ�����ֶԻ�������ڸ����ֶԵ������������ҿ���ͨ���ı����ҳ��ּ����ϳ̶���Ӧ��ͬ��·�����ʵ��Ӧ��ʱ�Ͼ��á���ݡ�
3.2������ת���
3.2.1���Ե���ת��ܡ�
FREDERICH[3]�����������Ե����������ֹ����������Ϳ�ʵ�ֳ��־�����ڣ����Ƴ�
������͵��Ե���ת������Ϸǵ�

ͼ4��
Fig. 4��
�ձ����ڵ���������ʹ��Ҫ��������


����һϵ����ն��복������ͨ����֮���ì�ܣ��Ե���ת���ͨ������һϵ����նȣ�����ǰ���ּ�ĵ���������ֹ������们��ʹ�����ڹ�����ʱ�������ھ���λ��[34]�����Ե���ת��ܵĵ������ý�������ʵ�ֳ�����ȫ����
3.2.2���ȵ���ת��ܡ�
�ȵ�����ָ���ó���ͨ������ʱ���������ת��ܵ�ת�ǻ����복��֮���ת����ʹ�ֶ����ھ���λ�ã�ʵ������ֶԵ���������
��������
ͼ5��
Fig. 5��Sketch map of
ͼ6�������϶�ʽ�ṹ
Fig. 6��Structure of triangle drag
���ų��й����ͨ��չ������С���߰뾶ͨ���Ա��������ӣ����ǹ�ע��ת��ܵĽṹ�Ż���ƣ�ʹ֮���õ���Ӧ��ͬ��·�������еľ���ת����������������ǵ�Ҫ���ӷ�չ�����������������������Ƶľ���ת��ܻ��Ϊ�ص��о������Ӱ͵Ϲ�˾�ڵ�������ʻ�������ת��ܴ�������
4 �ֶ���������
�������������������������ԭ����ij�ֻ���ʵ�ֳ��ֵĺ���λ����������ɱ������ڱ�����������������������ָͨ�����Ƶ���������������ֶԵ�ת�ٺͳ�ǵȣ�ʵ�ֶ����ֶԵ������ܵ��Ż���
WICKENS[37]��������������ƣ�ָ������ͨ���ֶԺ������ķ��������Ż������ֶԵĵ������ܣ���ͨ�������������ҳ��֣����������ݺ������ķ�����������λ�ã����Ƴ��ֳ����ʵ�ֵ������ܵ��Ż������ں���λ�Ʋ����������ԣ��ü���δ���ռ�����Ϊ�����ֶԵ�����Ż��ṩ��һ��ȫ�µķ���
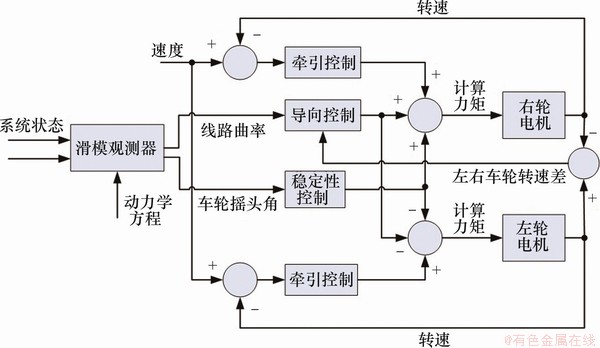
GOODALL��[38-42]��WICKENS�о��Ļ����ϣ��о����ֶԺ���λ���⣬���ͨ���ֶ�����״̬��(���ǡ�ת�ٲ��)�����������ơ�����GOODALL��[38]�Զ����������ᳵΪ�������ͨ�����ҳ��ֵ�ת�ٷ������Գ��ֵ������ܽ����Ż��ķ������������˼·��ͼ7��ʾ��MEI��[39-40]����챵��Ӧ���ڶ������ֵĵ����Ż��У��о���ν����������ȶ����Ż����Խ���������ж������ֵļ��ɿ��ƣ�PEREZ��[41-42]������������ֵĵ����Ż���ǣ����ϣ�ͨ��ǣ�������ת�ز�����ֶԡ�
ͼ7��ת�ٷ�������
Fig.7��Speed feedback control
LIANG��[43]�ڷ���ʵ��Ļ����������1/5�����Ķ����ֶ�ģ�ͣ�����ͨ��ҡͷ�˶��Ŀ�������Ч���ƶ����ֶԵ����ԣ����Ҿ��нϺõ��ȶ��ԣ������ݵ�[44]�о�ʹ�ò�ͬ�������ͷ��������������Ʒ������ܽ��˾��е��������ķ��������о��˻���PI���Ƶ��ٲ�������Ż��о�(������·��Ϣ��֪)�����[45]���һ�����dz��ֲ��ٻ����Զ����ֶԽ��в��ٿ��ƣ���Ч�ܵ�[46-47]���ͨ�����ŵ��ֱ���������֣�ʵ������ֲ������С�
���ǵ����Ʒ����ľ����Ա���ԣ����ײ�ij���ת����Ϣ��Ϊ�о����ǽ��ж����ֶ����������о�����ѡ�������ݵ�[48]�о��ٲ���Զ������ֵĵ����Ż�Ч����ͬʱ����PI�������棬��ϵͳ�ȶ��Կ��ƵĽ��з��棻������[49]�о��ٲ����ϵ���Զ����ֶԵ�������Ӱ��Ĺ��ɣ�����������ֵ��BARBERA��[50]����һ�ֵ��Ӳ���ת���(�����)��ͨ��������λ�ֶԽ��ٶȲ�����������ϳ̶ȣ���Ч�ܵ�[51-53]�о��������ת��ܻ����������˵������ϸն�ϵ������������ֵ������������ԡ�
������������Ŀ��Ʒ�ʽ�����ܽ�Ϊ2�֣�һ��ͨ���������Գ���ʩ�����أ�ʹ�����ھ���(actuated independently rotating wheels, AIRW)������ͨ�����ʩ��ǣ���������أ��ı䳵��ת�ٽ���������������ҡͷ���صȷ����仯������ֶԵ�������(driven independently rotating wheels, DIRW)����Ӿ��[54]��2�ַ��������������о���������������2�ַ���������߶������ֵĵ������ܣ����ڻ�ó��ٺ���·��Ϣ��AIRWЧ����������DIRWЧ����BRACCIALI[55]�����˾��ж�����ת�����ֳ���ʹ��ת�ؿ��ƹ����ߵ���Խ�ԣ����봫ͳת��ܽṹ���˶Աȣ�OH��[56-57]��ƶ����ֶ�ǣ�������������������˸��������Ƶ��������Σ�ʵ�ֿ������������Բ���ת�ز�����Ż��ֶԵ���ͨ��Ӳ���ڻ�������֤�˿��Ʋ��Ե���Ч�ԡ�
���ż����ķ�չ�����Ƕ���������Ҳ����˸���Ҫ�������ϵͳ��³�����Լ����ܻ������ܵ�[58]����³���ԶԿ���ϵͳ��������ƣ�MALIKOV[59]���һ�ֹ۲�������Ӧ���ڽ��ϵͳδ֪���뼰��ȷ���������⣬���Ϊ�����ֶԵ����������ṩһЩ�ο�������[60]�о������������ܻ�������˻���Androidƽ̨�����ܿ����ն�������ʵ�ֶԳ�����ʻ��·��Ϣ�Ļ�ȡ����¼�Լ��Գ����ٲ�Ŀ���(��ͼ8)��Ϊ��������Ӧ�õķ�չ�����˹��ס�

ͼ8������������������
Fig. 8��Active control of intelligent software
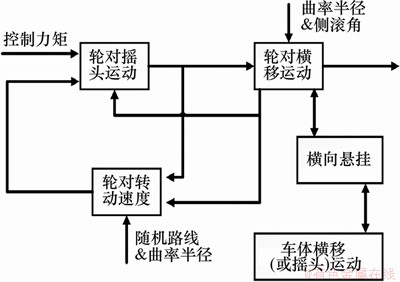
���ڶ������о��ɹ��ķ����ܽᣬ�������߷��֣����еĶ����ֶ��������Ʒ����������ֶԵ�״̬��Ϣ����·��Ϣ�Ļ�ȡ��������ʵ������ʱ�����Ի��һЩ��Ϣ����ˣ�����ѧ���������о���λ�ȡ������Ϣ����LI��[61-63]ʹ�ÿ������˲������ֶԼ���·��Ϣ������ʹ�õ���ȫά�۲�����ϵͳ�����ҳɱ��ϸߡ���Ч�ܵ�[64-65]�����ͨ����ά�۲������ֶ�״̬����·��Ϣ���й��Ƶķ�����ѡ���ײ���ֶ�״̬��Ϣ�������ֶ�����״̬������ֶԵ��������ƣ����Ʋ�����ͼ9��ʾ���÷����ܹ�ͨ����������״̬��ȡ������������ȫ����״̬��Ϣ��ʵ�־��õĿ��ơ�������ʵ����Ӫ����ĸ����ԣ�δ�����о������Ƕ������أ��ԶԿ���ϵͳ��³���Խ����Ż���ʹ���ܹ���Ӧ�����������紫����ʧ�飬�۲���ƥ������������ʱ����α�֤����ϵͳ�����ã�������������Ϣ���ʶ���ų���ִ������������ʱ�ĶԲߵȡ�δ�������ֶ����������ڱ�֤�����ֶԵ���������ͬʱ�����Ƶľ�����������Ҳ����Ϊ��������о����ص��ע�����⡣
ͼ9�����ڹ۲������������Ʋ���
Fig. 9��Active control scheme of wheelset via observers
�������Ƽ�����Ϊ�ֶԵ����Ż���һ�����ŷ�����Ȼ���ڳɱ��ߡ��Ѷȴṹ���ӵ����⣬������ڱ�������������Զ������ֵ������ܵ��Ż���ɿ��Ը��ã��ܹ���Ӧ������·�����������о������룬�����������е�ṹ�Ľ��Ľ�ϣ����ܳ�Ϊδ���������ֵ����Ż�����������
5 �ܽ���չ��
�������ֵĵ��������ǹ����ͨ��չ��������һ���������⣬���Ǵ��ֶ���������������Ϳ��Ƶ���ȶ���������������о���������ʮ��ķ�չ���ڵ���������ۡ��Ż������ȷ���ȡ���˷�˶�ɹ�����������ʵ��Ҳ֤��������о�����Ч�ԣ�ʹ�����ֵĵ���������������
�����ֶԵ����Ż��о��ڷ�չѸ�ٵ�ͬʱ��Ҳ����������һЩ���⡣����ֶ�̤��ṹ���Ż��У�ͨ�����淽��(����Ӵ��Dz�)�Ѿ�������������ֶԵ������ܣ�ת��ܽṹ�Ľ�Ҳ�������������⣻�������Ƽ������ٿռ�������Լ��ɱ����⡣������Щ���⣬һ������Ҫ��ص������о���ͨ���䱾���ļ���ͻ����������״����һ����Ҳ��Ҫ̽���µĶ����ֶԵ����Ż�������
���ڶ����ֶԵ�����δ�����о���Ӧ�ã�����Ԥ�����ǣ�
1) �����ֶ���ת��ܻ�е�ṹ����ĸĽ����Խ�����������ע�����ֶ�̤��ĸĽ���ת��ܽṹ���Ż��ȣ�
2) �������۵������о��Լ������۵ķ��֣���ʹ�ö����ֶԵ����Ż�ȡ��ͻ���ԵĽ�չ��
3) δ�������ֶԵ����Ż��ľ����Ժͱ������������о��빤��Ӧ�õ��ص��ע����
4) ���ֶ����ֶԵ����Ż��������ۺ����ص㷢չ����֮һ��
5) �����ֶԵ�����Ż�������������������Ƶļ����Ż�������ǣ�����ƻ��ȶ��Կ��ƻ�Ϊ��������о��ȵ㡣
�ο����ף�
[1] BECKER P. On the use of individually supported free rolling wheels on railway vehicles[J]. Eisenbahntechnische Rundschau, 1970, 19(11): 457-463.
[2] ������. ������ת����ת��ܵ��������о� [D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ, 2010: 3-4.
XU Mingchun. A study on steering behaviour of the bogie with independently rotating wheels[D]. Chengdu: Southwest Jiaotong University. School of Mechanical Engineering, 2010: 3-4.
[3] FREDERICH F. Possibilities as yet unknown or unused regarding the wheel/rail tracking mechanism-development of modern rolling stock running gear[J]. Rail International, 1985, 16(11): 33-40.
[4] SATOU E, MIYAMOTO M. Dynamics of a bogie with independently rotating wheels[J]. Vehicle System Dynamics, 1992, 20(S1): 519-534.
[5] KAPLAN A, SHORT S A. Dynamics of independently rotating wheel systems[R]. California: TRW Systems Grops, 1970: 1-74
[6] KAPLAN A, HASSELMAN T K, SHORT S A. Independently rotating wheels for high speed trains[C]// SAE Technical Paper Series 400 Commonwealth Drive. Warrendale, PA, United States: SAE International, 1970: 2496-2508.
[7] ���ȳ�, ������, ���ƽ, ��. 100%�͵ذ��ִ��й�糵������[J]. �ִ����й����ͨ, 2014(1): 33-37.
FU Wenchao, HUANG Liewei, SUN Jiaping, et al. Research and development on 100% low-floor modern tram[J]. Modern Urban Transit, 2014(1): 33-37.
[8] DUKKIPATI R V, NARAYANA SWAMY S, OSMAN M O M. Independently rotating wheel systems for railway vehicles: a state of the art review[J]. Vehicle System Dynamics, 1992, 21(1): 297-330.
[9] ������, ������, ���Ͷ�. �͵ذ��������ת�����Ƽ�����ѧ����[J]. ��е���, 2019, 36(7): 58-62.
ZHANG Mingkang, LI Xiaofeng, CHENG Xiandong. Design of the low-floor independent wheel's bogie and analysis on its dynamic performance[J]. Journal of Machine Design, 2019, 36(7): 58-62.
[10] HELLER R, LAW E H. Optimizing the wheel profile to improve rail vehicle dynamic performance[C]// Proceedings of the 6th IAVSD-Symposium Technical. Berlin, 1979: 179-195.
[11] EICKHOFF B M, HARVEY R F. Theoretical and experimental evaluation of independently rotating wheels for railway vehicles[C]// 11th Lavsd Symposium. Kingston, 1989: 190-202.
[12] Ҷ��. ����̤����״��ƵĿ�ѧ��[J]. ������ȼ����, 2000(3): 39-43.
YE Juan. Scientific design of wheel tread[J]. Foreign Diesel Locomotive, 2000(3): 39-43.
[13] ��������, ������. ����������̤����״������[J]. ������������, 2002, 39(2): 36-38.
EISAKU S, LIU Xinming. Development of wheel profile for independently rotating wheels[J]. Foregin Roling Stock, 2002, 39(2): 36-38.
[14] ����, ����, ���˻�. ������ת����̤�����[J]. ��ȼ����, 2009(12): 14-17.
REN Yi, LI Fu, HUANG Yunhua. Design of wheel profile for independently rotating wheel[J]. Diesel Locomotives, 2009(12): 14-17.
[15] ������. ��������̤�����[D]. ����: ������ͨ��ѧ������������ѧԺ, 2009: 19-43.
MENG Zhaoming. Tread design for independently rotating wheel[D]. Dalian: Dalian Jiaotong University. College of Locomotive and Rolling stock Engineering, 2009: 19-43.
[16] ���, ������. ��·����̤�����ε�������Ʒ���[J]. ��е����ѧ��, 2010, 46(16): 41-47.
SHEN Gang, ZHONG Xiaobo. Inverse method for design of wheel profiles for railway vehicles[J]. Journal of Mechanical Engineering, 2010, 46(16): 41-47.
[17] SHEN G, AYASSE J B, CHOLLET H, et al. A unique design method for wheel profiles by considering the contact angle function[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2003, 217(1): 25-30.
[18] KOMATSU Y, SUGIYAMA H, MICHITSUJI Y, et al. Running stability of independently rotating wheelset with inverted tread conicity(mechanical systems)[J]. Transactions of the Japan Society of Mechanical Engineers Series C, 2010, 76(11): 3077-3085.
[19] SUDA Y, WANG Wenjun, NISHINA M, et al. Self-steering ability of the proposed new concept of independently rotating wheels using inverse tread conicity[J]. Vehicle System Dynamics, 2012, 50(S1): 291-302.
[20] WANG Wenjun. Design of the wheel profile of an independently rotating wheel with inverse tread conicity by considering the trajectory of the center of gravity[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2016, 230(3): 672-680.
[21] KOYANAGI S. A new guide system for a wheel-rail vehicle[J]. Vehicle System Dynamics, 1977, 6(2/3): 106-109.
[22] KOYANAGI S. The stability of motion of the independently rotating wheel-axle[J]. Quart Repts Railway Techn Res Inst, 1971, 12(1): 29-33.
[23] ������. ���ö�����ת�����г��ĵ��������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2015: 6-7.
LIU Xiaoyu. A study on steering behaviour of vehicles with independently rotating wheels[D]. Chengdu: Southwest Jiaotong University. State Key Laboratory of Traction Power, 2015: 6-7.
[24] ����, ������, ��ŵ, ��. ARPEGEת��ܽṹ���䶯��ѧ����[J]. �ִ����й����ͨ, 2017(11): 67-70.
LI Wen, HAN Junchen, LI Nuo, et al. Structure and dynamic performance of ARPEGE bogie[J]. Modern Urban Transit, 2017(11): 67-70.
[25] LENG Han, WANG Huijie, REN Lihui, et al. Dynamic performance study of transverse friction-coupled wheelset[C]// Proceedings of the 11th International Conference on Contact Mechanics and Wear of Rail/wheel Systems. Delft, 2018: 503-509.
[26] �ܽ�, �ż���, �ܺͳ�, ��. ��е����������ֶԹ�������������ܷ���[J]. ��е����ѧ��, 2019, 55(8): 128-135.
KOU Jie, ZHANG Jimin, ZHOU Hechao, et al. Analysis of guiding of the mechanical differential coupling wheels for railway vehicle[J]. Journal of Mechanical Engineering, 2019, 55(8): 128-135.
[27] ��Ч��, ½����. ��쳵�����ֱ���������ֵ�����ϼ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(10): 3694-3699.
SUN Xiaojie, LU Zhenggang. Electrical coupled method of independently rotating wheels with motor directly driving in light railway vehicles(LRV)[J]. Journal of Central South University(Science and Technology), 2014, 45(10): 3694-3699.
[28] ������. ������ת��������������Ʋ��Է����о�[D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ, 2018: 3-4.
HUANG Xiaoqing. The control strategies simulation research on actively steering of independently rotating wheelset[D]. Chengdu��Southwest Jiaotong University. School of Mechanical Engineering. 2018: 3-4.
[29] �½�, л�ӻ�, ������, ��. 100%�͵ذ��й�糵ת��ܹ��ܹ������о�[J]. ����������ǹ쳵��, 2015, 38(4): 13-15.
CHEN Jian, XIE Jiahui, LIU Yulong, et al. Localization research of bogie frame for 100% low-floor tram[J]. Electric Locomotives & Mass Transit Vehicles, 2015, 38(4): 13-15.
[30] ��ï��, ������, ������. �����ֶ����ת��ܵ����� ��[J]. ���Ͻ�ͨ��ѧѧ��, 2007, 42(6): 695-700.
CHI Maoru, ZHANG Weihua, DAI Huanyun. Steering behaviors of coupled bogie with independent wheels[J]. Journal of Southwest Jiaotong University, 2007, 42(6): 695-700.
[31] ���Ͼ���, ��ΰƽ.�ձ������ߵ����������õ���ת��ܵ�����״��[J]. ������������, 2016, 53(1): 26-30.
YASUHIRO O, LI Weiping. Operation conditions of metro vehicles with steering bogies on Ginza line in Japan[J]. Foreign Rolling Stock, 2016, 53(1): 26-30.
[32] �Ƴ���ʷ, ������. �ձ�����������ʽ����ת��ܵĿ� ��[J]. ���������������, 2019(3): 20-23.
TOMOFUMI O, PENG Huimin. Development of pull-lever steering bogie for metro vehicles[J]. Foreign Locomotive & Rolling Stock Technology, 2019(3): 20-23.
[33] �������, ǰ����һ��, ����¡һ,��.���ֶԲ��ö�����ת���ֵ��Ե���ת��ܵ�����ͨ������[J]. ������ȼ����, 1999(5): 8-14.
YOSHIDA S, MASAICHIRO M, RYUICHI N. Curve passing performance of self-guided bogie with independent turning wheels for rear wheel pair[J]. Foreign Diesel Locomotive, 1999(5): 8-14.
[34] ����, �����, ������, ��. һϵˮƽ���ҸնȶԸ��ٿͳ�����ѧ���ܵ�Ӱ���о�[J]. ������������, 2019, 39(1): 21-26.
YUE Peng, LI Guofang, DING Wangcai, et al. Research on influence of primary horizontal suspension stiffness on the dynamic performance of high-speed passenger vehicles[J]. Railway Locomotive & Car, 2019, 39(1): 21-26.
[35] CARBALLEIRA J, BAEZA L, ROVIRA A, et al. Technical characteristics and dynamic modelling of Talgo trains[J]. Vehicle System Dynamics, 2008, 46(S1): 301-316.
[36] ��ï��, ����, ���˻�. ��6����ʻ�������ת��ܴ������[J]. ������������, 2005, 42(2): 1-5.
FU Maohai, LI Fu, HUANG Yunhua. Summarization of the 6th international locomotive and vehicle bogie congress[J]. Foreign Rolling Stock, 2005, 42(2): 1-5.
[37] WICKENS A H. Dynamic stability of articulated and steered railway vehicles guided by lateral displacement feedback[J]. Vehicle System Dynamics, 1994, 23(S1): 541-553.
[38] GOODALL R, MEI T X. Mechatronic strategies for controlling railway wheelsets with independently rotating wheels[C]// 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Como, Italy: IEEE, 2001: 225-230.
[39] MEI T X, LI H, GOODALL R M, et al. Dynamics and control assessment of rail vehicles using permanent magnet wheel motors[J]. Vehicle System Dynamics, 2002, 37(S1): 326-337.
[40] MEI T X, GOODALL R M. Practical strategies for controlling railway wheelsets independently rotating wheels[J]. Journal of Dynamic Systems, Measurement, and Control, 2003, 125(3): 354-360.
[41] PEREZ J, MAUER L, BUSTURIA J M. Design of active steering systems for bogie-based railway vehicles with independently rotating wheels[J]. Vehicle System Dynamics, 2002, 37(S1): 209-220.
[42] PEREZ J, BUSTURIA J M, MEI T X, et al. Combined active steering and traction for mechatronic bogie vehicles with independently rotating wheels[J]. Annual Reviews in Control, 2004, 28(Pt2): 207-217.
[43] LIANG B, IWNICKI S D. An experimental study of independently rotating wheels for railway vehicles[C]// 2007 International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2007: 2282-2286.
[44] ������. �������ֵ������о�[D]. �Ϻ�: ͬ�ô�ѧ��������й����ͨ�о�Ժ, 2006: 84-110.
REN Lihui. The study on method to enhancing steering capability of independently rotating wheels[D]. Shanghai: Tongji University. Institute of Rail Transit. 2006: 84-110.
[45] ���. ���������������Ķ����ֶԵ������о�[D]. �ɶ������Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2016: 38-67.
LI Hong. The study on steering technology of independently rotating wheels based on active differential mechanism[D]. Chengdu��Southwest Jiaotong University. State Key Laboratory of Traction Power. 2016: 38-67.
[46] ��Ч��, ½����, �ž�. ��ʽ����ͬ�����ֱ�������������ּ�������Ƽ���[J]. �й�������ѧ, 2013, 34(6): 93-98.
SUN Xiaojie, LU Zhenggang, ZHANG Jin. Disc PMSM directly driven independently rotating wheel and steering control method[J]. China Railway Science, 2013, 34(6): 93-98.
[47] ��Ч��, ½����, �ž�. �͵ذ��й�糵����ʽ���ŵ��ֱ������[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2014, 42(8): 1245-1250.
SUN Xiaojie, LU Zhenggang, ZHANG Jin. Disc PMSM-direct-drive for low floor tramcar[J]. Journal of Tongji University(Natural Science), 2014, 42(8): 1245-1250.
[48] ������, �ܾ���, ���. ������챵���Ķ��������ֶԵ������������[J]. �й�������ѧ, 2010, 31(5): 77-83.
REN Lihui, ZHOU Jinsong, SHEN Gang. The active steering control of the independent wheelset with the hub motors[J]. China Railway Science, 2010, 31(5): 77-83.
[49] �����, ��ï��, ������, ��. ������쳵��������ת�����ٲ���Ƽ����������о�[J]. ��е����ѧ��, 2019, 55(2): 107-114.
LI Haotian, CHI Maoru, WU Xingwen, et al. Investigation on steering performance and speed-differential control of the Urban light rail vehicle with independently rotating wheels[J]. Journal of Mechanical Engineering, 2019, 55(2): 107-114.
[50] BARBERA A N, BUCCA G, CORRADI R, et al. Electronic differential for tramcar bogies: system development and performance evaluation by means of numerical simulation[J]. Vehicle System Dynamics, 2014, 52(S1): 405-420.
[51] ��Ч��. ������϶�������ת��ܵ������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2010: 39-56.
SUN Xiaojie. A study on steering technology of bogie with electrical coupling independently rotating wheel[D]. Chengdu��Southwest Jiaotong University. State Key Laboratory of Traction Power. 2010: 39-56.
[52] ��Ч��, ½����, ������. ���������������ֶԵ�����������[J]. �й���е����, 2013, 24(7): 970-974.
SUN Xiaojie, LU Zhenggang, ZHOU Wenxiang. Oriented mechanism and simulation for electrical coupled wheelsets of railway vehicles[J]. China Mechanical Engineering, 2013, 24(7): 970-974.
[53] ��Ч��, ½����. ��쳵����������ֶԵ�����Ƽ���[J]. ��ͨ���乤��ѧ��, 2013, 13(3): 40-46.
SUN Xiaojie, LU Zhenggang. Steering control technology of LRV with electrical coupled wheelset[J]. Journal of Traffic and Transportation Engineering, 2013, 13(3): 40-46.
[54] ��Ӿ��. �������������������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ. 2015: 49-59.
WU Yongjiang. The study on active steering technology of independently rotating wheels[D]. Chengdu: Southwest Jiaotong University. School of Mechanical Engineering. 2015: 49-59.
[55] BRACCIALI A, MEGNA G. Traction and curving of vehicles equipped with guided independently rotating wheels[C]// Proceedings of the 11th International Conference on Contact Mechanics and Wear of Rail/wheel Systems. Delft, 2018: 90-97.
[56] OH Y J, LIU Huaicong, CHO S, et al. Design, modeling, and analysis of a railway traction motor with independently rotating wheelsets[J]. IEEE Transactions on Magnetics, 2018, 54(11): 1-5.
[57] OH Y J, LEE J K, LIU Huaicong, et al. Hardware-in- the-loop simulation for active control of tramcars with independently rotating wheels[J]. IEEE Access, 2019, 7: 71252-71261.
[58] ����, ½����, �ſ���, ��. ������ת�����й�糵���ۺϵ������[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2017, 45(11): 1688-1693.
YANG Zhe, LU Zhenggang, ZHANG Kuangyan, et al. ��-synthesis active guidance control of tramcar with independently rotating wheels[J]. Journal of Tongji University(Natural Science), 2017, 45(11): 1688-1693.
[59] MALIKOV A I. State and unknown inputs observers for time-varying nonlinear systems with uncertain disturbances[J]. Lobachevskii Journal of Mathematics, 2019, 40(6):769-775.
[60] ����. ����������ת�Dz���й�糵���ܵ������[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2018: 34-43.
ZHANG Zhen. Tram intelligent steering control based on left and right wheel turning angle difference[D]. Chengdu: Southwest Jiaotong University. State Key Laboratory of Traction Power, 2018: 34-43.
[61] LI H, GOODALL R M. State estimation for active steering of railway vehicles[J]. IFAC Proceedings Volumes, 1999, 32(2): 4359-4364.
[62] LI H. Measuring systems for active steering of railway vehicles[D]. England: Loughborough University. Department of Electronic and Electrical Engineering, 2001: 1-2.
[63] LI J, GOODALL R M, MEI T X, et al. Steering controllers for rail vehicles with independently driven wheel motors[R]. England: Loughborough Universiey, 2003: 4-6.
[64] ��Ч��, ���. ��������ֶ�״̬����·�����Ĺ���[J]. ���Ͻ�ͨ��ѧѧ��, 2017, 52(3): 600-606.
SUN Xiaojie, YANG Junqi. Information estimation on wheelset state and track features of railway vehicles[J]. Journal of Southwest Jiaotong University, 2017, 52(3): 600-606.
[65] ��Ч��, ½����, ���. ����������쳵�����ɿ����о�[J]. ������ѧ�빤��ѧ��, 2018, 15(11): 2972-2979.
SUN Xiaojie, LU Zhenggang, YANG Junqi. Combined control research on LRV with independently rotating wheels[J]. Journal of Railway Science and Engineering, 2018, 15(11): 2972-2979.
(�༭ ����ƽ)
�ո����ڣ� 2020 -06 -29; �����ڣ� 2020 -08 -11
������Ŀ(Foundation item)���Ϻ�Ӧ�ü�����ѧЭͬ���»���������Ŀ(XTCX2020-16)���Ϻ�Ӧ�ü�����ѧ��ѧ���о����Ŷ���Ŀ(GN203006020-B20)���Ϻ��п�ί�ط�����������Ŀ(20090503100) (Project(XTCX2020-16) supported by the Collaborative Innovation Fund of Shanghai Institute of Technology; Project(GN203006020-B20) supported by Interdisciplinary Graduate Team of Shanghai Institute of Technology; Project(20090503100) supported by the Local Capacity Building Project of Shanghai Municipal Science and Technology Commission)
ͨ�����ߣ���Ч�ܣ���ʿ����ʦ�����³����������ơ���������о���E-mail��sxjlm2003@163.com
���ø�ʽ�� ��Ч��, ����, ½����, ��. �������ֵ����Ż��о���չ[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2021, 52(4): 1316-1326.
Citation: SUN Xiaojie, XU Cong, LU Zhenggang, et al. Research progress of independent rotating wheels steering optimization[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1316-1326.
ժҪ����Թ��ڶ������ֵ����Ż������о����������ּ�����δ�������״�����ڶ�������������������о��ܽᣬ�Ӷ������ֵ���ԭ������չ���̡��о��ɹ��Լ��о�����ȷ������ϵͳ���ɡ����ȣ��Զ������ֵķ�չ���̼����������������������ζ�̤����״�Ż���ת��ܽṹ�Ľ����������Ƶȶ������ֵ����Ż���������������ָ���ȶ��Ժ;������Ǿ����乤��Ӧ�õ���Ҫ���أ����Ե�����δ�����ܵķ�չ�������չ�������ڶԵ�һ�Ż��������������о���ͬʱ�����Ż�����������δ�������ơ�
[2] ������. ������ת����ת��ܵ��������о� [D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ, 2010: 3-4.
[7] ���ȳ�, ������, ���ƽ, ��. 100%�͵ذ��ִ��й�糵������[J]. �ִ����й����ͨ, 2014(1): 33-37.
[9] ������, ������, ���Ͷ�. �͵ذ��������ת�����Ƽ�����ѧ����[J]. ��е���, 2019, 36(7): 58-62.
[12] Ҷ��. ����̤����״��ƵĿ�ѧ��[J]. ������ȼ����, 2000(3): 39-43.
[13] ��������, ������. ����������̤����״������[J]. ������������, 2002, 39(2): 36-38.
[14] ����, ����, ���˻�. ������ת����̤�����[J]. ��ȼ����, 2009(12): 14-17.
[15] ������. ��������̤�����[D]. ����: ������ͨ��ѧ������������ѧԺ, 2009: 19-43.
[16] ���, ������. ��·����̤�����ε�������Ʒ���[J]. ��е����ѧ��, 2010, 46(16): 41-47.
[23] ������. ���ö�����ת�����г��ĵ��������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2015: 6-7.
[24] ����, ������, ��ŵ, ��. ARPEGEת��ܽṹ���䶯��ѧ����[J]. �ִ����й����ͨ, 2017(11): 67-70.
[26] �ܽ�, �ż���, �ܺͳ�, ��. ��е����������ֶԹ�������������ܷ���[J]. ��е����ѧ��, 2019, 55(8): 128-135.
[27] ��Ч��, ½����. ��쳵�����ֱ���������ֵ�����ϼ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(10): 3694-3699.
[28] ������. ������ת��������������Ʋ��Է����о�[D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ, 2018: 3-4.
[29] �½�, л�ӻ�, ������, ��. 100%�͵ذ��й�糵ת��ܹ��ܹ������о�[J]. ����������ǹ쳵��, 2015, 38(4): 13-15.
[30] ��ï��, ������, ������. �����ֶ����ת��ܵ����� ��[J]. ���Ͻ�ͨ��ѧѧ��, 2007, 42(6): 695-700.
[31] ���Ͼ���, ��ΰƽ.�ձ������ߵ����������õ���ת��ܵ�����״��[J]. ������������, 2016, 53(1): 26-30.
[32] �Ƴ���ʷ, ������. �ձ�����������ʽ����ת��ܵĿ� ��[J]. ���������������, 2019(3): 20-23.
[34] ����, �����, ������, ��. һϵˮƽ���ҸնȶԸ��ٿͳ�����ѧ���ܵ�Ӱ���о�[J]. ������������, 2019, 39(1): 21-26.
[36] ��ï��, ����, ���˻�. ��6����ʻ�������ת��ܴ������[J]. ������������, 2005, 42(2): 1-5.
[44] ������. �������ֵ������о�[D]. �Ϻ�: ͬ�ô�ѧ��������й����ͨ�о�Ժ, 2006: 84-110.
[45] ���. ���������������Ķ����ֶԵ������о�[D]. �ɶ������Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2016: 38-67.
[46] ��Ч��, ½����, �ž�. ��ʽ����ͬ�����ֱ�������������ּ�������Ƽ���[J]. �й�������ѧ, 2013, 34(6): 93-98.
[47] ��Ч��, ½����, �ž�. �͵ذ��й�糵����ʽ���ŵ��ֱ������[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2014, 42(8): 1245-1250.
[48] ������, �ܾ���, ���. ������챵���Ķ��������ֶԵ������������[J]. �й�������ѧ, 2010, 31(5): 77-83.
[51] ��Ч��. ������϶�������ת��ܵ������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2010: 39-56.
[52] ��Ч��, ½����, ������. ���������������ֶԵ�����������[J]. �й���е����, 2013, 24(7): 970-974.
[53] ��Ч��, ½����. ��쳵����������ֶԵ�����Ƽ���[J]. ��ͨ���乤��ѧ��, 2013, 13(3): 40-46.
[54] ��Ӿ��. �������������������о�[D]. �ɶ�: ���Ͻ�ͨ��ѧ��е����ѧԺ. 2015: 49-59.
[60] ����. ����������ת�Dz���й�糵���ܵ������[D]. �ɶ�: ���Ͻ�ͨ��ѧǣ�����������ص�ʵ����, 2018: 34-43.
[64] ��Ч��, ���. ��������ֶ�״̬����·�����Ĺ���[J]. ���Ͻ�ͨ��ѧѧ��, 2017, 52(3): 600-606.
[65] ��Ч��, ½����, ���. ����������쳵�����ɿ����о�[J]. ������ѧ�빤��ѧ��, 2018, 15(11): 2972-2979.
