
��������ϵͳ��綯����ת��ϵͳ�ļ��ɿ���
������1, 2���� ��1��Ԭ����3
(1. ���ϴ�ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410075��
2. ���Ϲ�ѧԺ ��е����ϵ������ ������421002��
3. ���մ�ѧ �����뽻ͨ����ѧԺ������ ��212013)
ժ Ҫ��
ժ Ҫ���ڽ������ܺ�ת��ϵͳ��������ѧģ�͵Ļ����ϣ�������������ϵͳ��綯����ת��ϵͳ����֮������ϵ��Э���������������˫ϵͳ���Ʋ����������Ż�����������������ϵͳ������У�����ƣ��Ե綯����ת��ϵͳ����PID���ƣ��о�����ϵͳ�ṹ�����Ϳ��Ʋ�����������⡣�������������벻�ӿ��ơ���ϵͳ������ȣ����ɿ����³���ת������Ч����ǿ����Ӧ������̬�����ļ��ٶȡ���ڽ��ٶȡ���������ǵȶ���������ߣ���������ʻƽ˳�ԺͲ����ȶ��Ծ��õ����Լ�ǿ���������ܵõ���ߡ�
�ؼ��ʣ�
�����������綯����ת�������ɿ����������Ż���
��ͼ����ţ�TP29��U463.4 ���ױ�־�룺A ���±�ţ�1672-7207(2009)06-1593-06
Integrated control on vehicle suspension system and electric power steering system
CUI Xiao-li1, 2, YANG Yue1, YUAN Chuan-yi3
(1. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China;
2. Department of Mechanical Engineering, Hunan Institute of Technology, Hengyang 421002, China;
3. School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
Abstract: Based on the dynamic model of vehicle suspension and steering, the relationship and harmony mechanism between active suspension system and electric power steering were analyzed. In order to study the coupling relationship of integrated system��s structure and control parameters, a combined optimize strategy to adjust parameters of two systems was proposed. The controller of active suspension system was designed using self-tuning control and the electric power steering system was designed using PID control. The simulation results show that compared with no control or single control system, integrated control can improve the controllability and stability, ride comfort, maneuverability and safety of vehicle.
Key words: active suspension; electric power steering; integrated control; combined optimize
���ŶԳ��������ȶ��Ժ���ʻƽ˳�Ե�Ҫ��Խ��Խ�ߣ���ͳ�ı��������������ƽ˳���밲ȫ�Ե�Ҫ��Ŀǰ���Գ����ϼ��ɼ����о��϶���Ƿ������ƶ�ϵͳ(ABS)����������תϵͳ(ASR)������ӦѲ��ϵͳ(ACC)���ܳ��о�[1-4]��������������ϵͳ(ASS)�͵綯����ת��(EPS)���м��ɿ��Ƶ��о�����[5-7]��������Ϊ�����Ȳ������Գ�����ʻ��ƽ���Լ�����Ҫ������ת��ɼ���ƣ�ͣ����·�У����Ӹ��ٰ�ȫ�ԣ���ˣ���Ϊ���̼���ϵͳ��Ҫ��ɵ�������ת���Э�������Ե���Ϊ��Ҫ[8-10]��Ϊ�ˣ��������߶�ASS+EPS�ļ��ɿ��ƽ����о��������˫ϵͳ�ļ����Ż����ԡ�
1 ���ɶ���ѧģ��
���ڳ�����ʻƽ˳��������ϵͳ������أ������ȶ�����ת��ϵͳ������ϵͳ������������ˣ����ۺϿ���ASS��EPS����ָ��Ļ����ϣ���������������ϵͳ��綯����ת��ϵͳ�ļ��ɿ���ģ��[11]��ģ��ʾ��ͼ��ͼ1~3��ʾ��
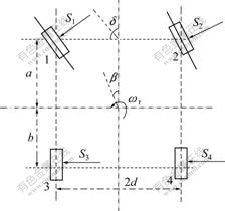
ͼ1 ����ģ����ͼ
Fig.1 Planform of integrated model
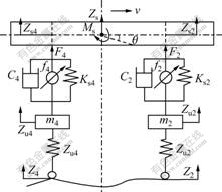
ͼ2 ����ģ�Ͳ���ͼ
Fig.2 Side elevation of integrated model
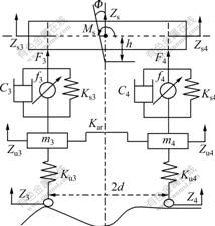
ͼ3 ����ģ�ͺ���ͼ
Fig.3 Backsight map of integrated model
1.1 ����ģ��
���Dz���Ӱ���ת��ģ��Ϊ��
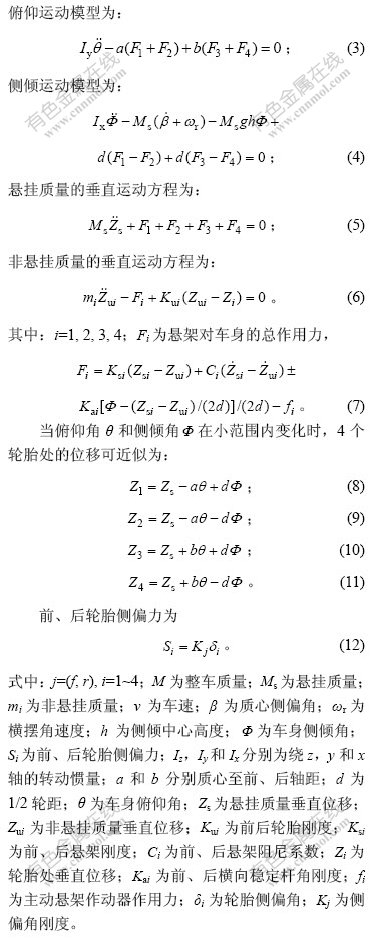
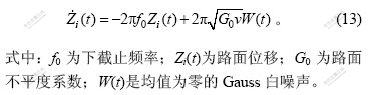
1.2 ��·ģ��
ͨ������һ���˲���������Ϊ·������ģ�ͣ�
1.3 ����ϵͳ״̬����
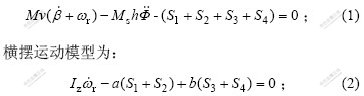
�ۺ�ʽ(1)~(6)��ȡϵͳ��״̬����Ϊ

2 ���ɿ��Ʋ���
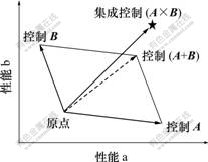
ϵͳ������һ����Ҫԭ���ǣ�������ϵͳ���ܼ���Ӳ����ܴﵽ���������Ż���Ŀ�ģ����ڳ�����ϵͳ����Ҳ����ˡ�������ͬ����ʻ״̬�������в�ͬ��Ҫ��һ����ʻʱ��Ҫ���ܽ����������ʸУ���ת����ƶ�ʱ����Ҫ���ܽ�Ӳ�����ȶ��ԡ�ΪЭ�����ߵ�ì�ܣ����뼯�ɿ��Ƶĸ���(��ͼ4��ʾ)[12]��������ϵͳA��Ȼ��ʹ������a�����������������b�ܿ���A��Ӱ���������ͣ�ͬ����������ϵͳBҲ����ˡ���ˣ�������ϵͳA��B�����һ�����Ǹ�������a��b��������(A��B)�ȵ������Ƶ�Ч�����ܻ�С��Ϊ�ˣ�������ɿ���(A��B)��˼������Э����ϵͳ����ì�ܣ��Դﵽ����������ܵ�Ŀ��[13]��
ͼ4 ���ɿ��Ƹ���ʾ��ͼ
Fig.4 Sketch map of integrated control method
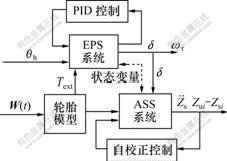
ͼ5��ʾΪ״̬������ϵļ��ɿ���ԭ��ͼ��ͼ�У�ϵͳ������Ϊת����ת�Ǧ�h��·�������W(t)�����Ϊ����ڽ��ٶȦ�r�����������![]() ���������Ĵ�ֱ���ٶ�
���������Ĵ�ֱ���ٶ�![]() �������ܵĶ��Ӷ�Zui-Zsi����̥�Ķ��غ�Kui(Zi-Zui)����ΪEPS���ƺ�������ǰ��ת�ǦĿ���ΪASSϵͳ��һ���ⲿ�������룬��Ӱ��������ˮƽ������ǰ��̥��ƫ��
�������ܵĶ��Ӷ�Zui-Zsi����̥�Ķ��غ�Kui(Zi-Zui)����ΪEPS���ƺ�������ǰ��ת�ǦĿ���ΪASSϵͳ��һ���ⲿ�������룬��Ӱ��������ˮƽ������ǰ��̥��ƫ��![]() ���ڴˣ��������˫ϵͳ���Ʋ����������Ż�������ͨ����EPS��������ѹU����PID���ƣ��������������ƺ�ڽ��ٶȵ���Ӧ�����ת�������ȣ�������У�����������ݷ�����״̬����������������ϵͳ���������Ĵ�ֱ���ٶȺ����ܶ��Ӷ���Ӧ����߳�������ʻƽ˳�ԡ�
���ڴˣ��������˫ϵͳ���Ʋ����������Ż�������ͨ����EPS��������ѹU����PID���ƣ��������������ƺ�ڽ��ٶȵ���Ӧ�����ת�������ȣ�������У�����������ݷ�����״̬����������������ϵͳ���������Ĵ�ֱ���ٶȺ����ܶ��Ӷ���Ӧ����߳�������ʻƽ˳�ԡ�
ͼ5 ���ɿ���ԭ��ͼ
Fig.5 Integrated control principle diagram
3 �����������
��MATLAB/SIMULINK�����£��Բ��ӿ��ơ���ϵͳ���ƺͼ��ɿ���3�ֲ�ͬ��״�����з��棬����4��Runge-Kutta�������㲽��Ϊ0.01������ѡ��ij������������������v=20 m/sʻ����ƽ��ϵ��Gq(n0)Ϊ5��10-6 m3/�ܵ�·�棬ת����ת������Ϊ30?�Ľ�Ծ�źţ������źŲ���·���˹���������ٶ�ת����ʻ�����и����ִ�·��������뻥�����[14-15]�����������ͼ6~13�ͱ�1��ʾ��
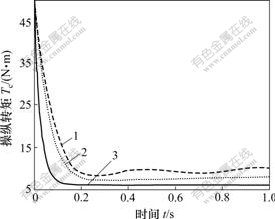
1�����ӿ��ƣ�2��EPS�������ƣ�3�����ɿ���
ͼ6 ��ͬ���������µ�ת���̲���ת��
Fig.6 Steering wheel torque under different control conditions
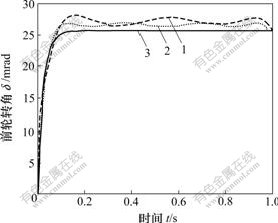
1�����ӿ��ƣ�2��EPS�������ƣ�3�����ɿ���
ͼ7 ��ͬ���������µ�ǰ��ת��
Fig.7 Front wheel steering angle under different control conditions
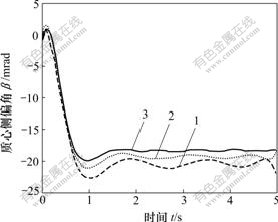
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
ͼ8 ��ͬ���������µ����IJ�ƫ��
Fig.8 Center of mass slip angle under different control conditions
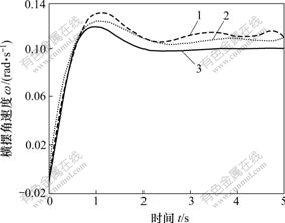
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
ͼ9 ��ͬ���������µij�����ڽ��ٶ�
Fig.9 Yaw rate velocity under different control conditions
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
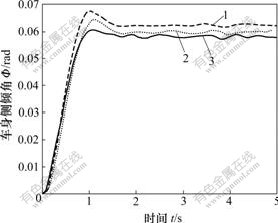
ͼ10 ��ͬ���������µij��������
Fig.10 Rolling angle under different control conditions
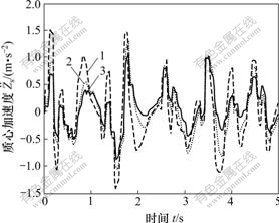
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
ͼ11 ��ͬ���������µij�����ֱ���ٶ�
Fig.11 Bouncing acceleration under different control conditions
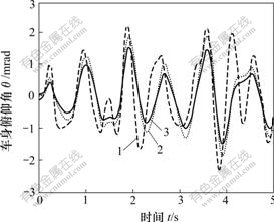
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
ͼ12 ��ͬ���������µij���������
Fig.12 Pitching angle under different control conditions
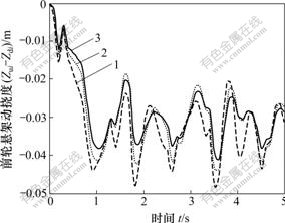
1�����ӿ��ƣ�2�����ܵ������ƣ�3�����ɿ���
ͼ13 ��ͬ���������µ�ǰ�����ܶ��Ӷ�
Fig.13 Front suspension deflection under different control conditions
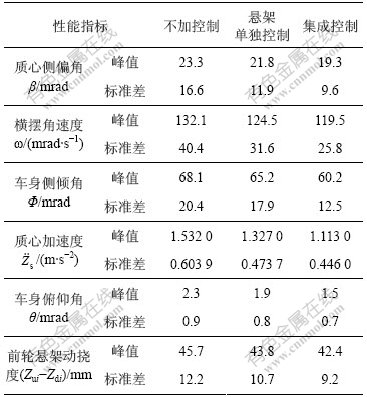
��1 ���ӿ���/��������/���ɿ��Ʒ��������
Table 1 No control/ASS separate control /integrated control simulate results
ͼ6��ͼ7��ʾ�ֱ�Ϊת���̲���ת����ǰ��ת����3�ֲ�ͬ�Ŀ�������£��Է����̽ǽ�Ծ�������Ӧ���ɼ������ɿ�����ת���̲���ת�ص���ֵ̬��С��ǰ��ת�ǵķ�ֵ����ֵ̬����С���ҵ�����̬ʱ��Ӧʱ����̣�������EPS����PID�������ƴ�֮��˵�����ɿ���ת������Ч�����á�
��ͼ8~10�ɼ����������ܿ��ƺͼ��ɿ��Ƶ����IJ�ƫ�ǡ���ڽ��ٶȡ���������ǵķ�ֵ���Ȳ��ӿ���ʱ��ҪС���ұ仯�����������ӱ�1�ɼ������ɿ��Ƶ����IJ�ƫ�ǡ���ڽ��ٶȡ���������ǵķ�ֵ�벻�ӿ������ʱ�ֱ��С��17.16%��9.54%��11.60%�������С��42.37%��36.15%��38.85%������ת������в����ȶ�������������ߣ����ɿ���������ã��������ܿ��ƴ�֮��
��ͼ11~13�ɼ����벻�ӿ���ʱ��ȣ����ɿ��ƺ�����ֱ���ٶȡ����������ǡ�ǰ�����ܶ��Ӷȵķ�ֵ��С27.34%��34.18%��7.22%�������С26.15%��12.97%��25.25%�����ѿ�������������ʻƽ˳��Ҳ�õ���ߣ����ܶ��Ӷȡ����ֶ��غ�û�����Ա仯��
4 �� ��
a. ���ɿ����벻�ӿ��ơ���������ϵͳ��ȣ�ת������Ч���������ȶ�����ã����ɿ��������˳����Ĵ�ֱ�˶����������������̬�ı仯����������ʻƽ˳�����š�
b. ������Ƶļ��ɿ��Ʋ��ԣ�ʹ�����ۺ����ܵõ�����ߣ����Ʒ�����Ч���Ӷ�Ϊ�������ɿ��Ƶ�ʵ�������ṩ�˲ο����ݡ�
�ο����ף�
[1] ����, ���Ѷ�, ������, ��. ����ABS/ASR���ɿ���ϵͳ�������µ�����װ��[J]. ũ�����о�, 2006(8): 193-195.
CUI Hai-feng, LIU Zhao-du, WU Li-jun, et al. Hill-start assist system based on integrated control system of ABS/ASR for car[J]. Research on Agriculture Mechanization, 2006(8): 193-195.
[2] MA Yue-feng, LIU Zhao-du, QI Zhi-quan, et al. Adaptive noise cancellation method used for wheel speed signal of integrate ABS/ASR system[J]. Journal of Beijing Institute of Technology, 2006, 15(2): 144-147.
[3] ��־Ȩ, ���Ѷ�, ʱ����, ��. ��������ABS/ASR/ACC���ɻ�ϵͳ��ABS�ο�����ȷ���������о�[J]. ��������, 2003, 25(6): 617-620.
QI Zhi-quan, LIU Zhao-du, SHI Kai-bin, et al. Determination of vehicle reference speed for ABS based on an ABS/ASR/ACC integrated system[J]. Automotive Engineering, 2003, 25(6): 617-620.
[4] �ž���, ���Ѷ�, ��־Ȩ, ��. ������Ϣ�ںϼ�����ABS/ASR/ACCϵͳ����[J]. ���������, 2004, 21(6): 155-158.
ZHANG Jing-bo, LIU Zhao-du, QI Zhi-quan, et al. Simulation of ABS/ASR/ACC integrated system based on information fusion technology[J]. Computer Simulation, 2004, 21(6): 155-158.
[5] Ԭ����, �� ��, ���Ʊ�, ��. ����������綯����ת��ϵͳģ�����ɿ���[J]. ���մ�ѧѧ��: ��Ȼ��ѧ��, 2007, 28(1): 29-32.
YUAN Chuan-yi, CHEN Long, JIANG Hao-bin, et al. Fuzzy integrated control of active suspension and electrical power steering system[J]. Journal of Jiangsu University: Natural Science Edition, 2007, 28(1): 29-32.
[6] ���䶫, ���仪, ����η, ��. �������ܺ͵綯����ת��ϵͳ��е����Ʋ��������Ż�[J]. ��е����ѧ��, 2008, 44(8): 67-72.
WANG Qi-dong, JIANG Wu-hua, CHEN Wu-wei, et al. Simultaneous optimization of mechanical and control parameters for integrated control system of active suspension and electric power steering[J]. Chinese Journal of Mechanical Engineering, 2008, 44(8): 67-72.
[7] Harada M, Harada H. Analysis of lateral stability with Integrated control of suspension and steering system[J]. JSAE Review, 1999, 20(4): 465-471.
[8] Tanaka H, Inoue H, Iwata H. Development of a vehicle integrated control system[C]//Proceeding of the XXIV FISITA Congress. London, 1992: 63-72.
[9] Wallentowitz H. Integrated of chassis and traction control systems[C]//Proceeding of AVEC��92. Yokohama, 1992: 1-7.
[10] Sato S, Inoue H, Tabata M, et al. Integrated chassis control system for improved vehicle dynamics[C]//Proceeding of AVEC��92. Yokohama, 1992: 413-418.
[11] Yoshimura T, Emoto Y. Steering and suspension system of a full car model using fuzzy reasoning based on single input rule modules[J]. Int J Vehicle Autonomous Systems, 2003, 1(2): 237-246.
[12] ׯ�̵�. �������ӿ���ϵͳ����[M]. ����: ����������ѧ������, 1998.
ZHUANG Ji-de. Engineering of automotive electronic control system[M]. Beijing: Beijing Institute of Technology Press, 1998.
[13] Ghoneim Y A, Lin W C, Sidlosky D M, et al. Integrated chassis control system to enhance vehicle stability[J]. International Journal of Vehicle Design, 2000, 23(1): 124-144.
[14] �� ��. ����LMSģ��/PD�㷨��ת��������ϵͳ���ɿ����о�[D]. ��: ���մ�ѧ�����뽻ͨ����ѧԺ, 2006.
XU Kai. Study of integrated control on steering and suspension system based on LMS fuzzy/PD algorithm[D]. Zhenjiang: School of Automobile and Traffic Engineering, Jiangsu University, 2006.
[15] ������, ���پ�, �� ��. ��ɿ���������ϵͳ��ģ����ģ�����Ʒ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(1): 128-130.
TANG Xiao-yan, LIU Shao-jun, WANG gang. Modeling of heave compensation system for deep-ocean mining and its simulation of fuzzy logical control[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 128-130.
�ո����ڣ�2009-02-11�������ڣ�2009-07-15
������Ŀ������ʡ�Ƽ����ƻ���Ŀ(2008GK3038)������ʡ��Ȼ��ѧ����������Ŀ(09JJ3112)
ͨ�����ߣ�������(1962-)��Ů�����Ϻ����ˣ����ڣ���ʿ�о��������³�����̬����ģ��������о����绰��13973468260��E-mail: l618c@163.com
