
������������������Ӧ��������ƥ���㷨
������, �º���
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083)
ժ Ҫ��
������ƥ���㷨֧�ִ�������ѡ�������, ���һ���µ�����Ӧ������������ƥ���㷨�� �����������ķ������Զ�̬�ػ����״�ʹ�С����������Ӧ���Ե�֧�ִ���, ��ͨ�������ӲΧ���ơ� ���Ĵ����Ӳ���ơ� ��̬������������ȷ���ʹ�㷨�õ��Ľ��� �о��������: ���㷨�����Ӳ�������ڵ������������õ���Ӧ��; ���ø��㷨��õ��Ӳ�ͼ���ȷ�ȸߴ�95%, �Ҽ���ʱ�����̵�5 s���ڡ�
�ؼ���: ����ƥ��; ����Ӧ����; �Ӳ����; ��̬����; �߽�Լ��
��ͼ�����:TP391 ���ױ�ʶ��:A ���±��: 1672-7207(2005)06-1042-06
Stereo matching algorithm of adaptive window based on region growing
LUO San-ding, CHEN Hai-bo
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Aimed at the supported windows selected difficultly in stereo matching algorithm based on local areas, a new stereo matching algorithm of adaptive windows via region growing was proposed. This region growing method can offer appropriate shape and size of supported windows adaptively. In addition, this algorithm is improved by estimating the scope of disparity, approximating the disparity of the core window, adjusting the step dynamically. The results show that this algorithm has good adaptability in discontinuous and occlude areas. It can offer robust disparity estimation image using this algorithm. The precision of the algorithm is more than 95%, and its calculating time is less than 5 s.
Key words: stereo matching; adaptive window; disparity estimation; dynamic expanding and contracting; edge restriction
����ƥ�������Ǽ�����Ӿ��о����ȵ�����֮һ�� Ŀǰ, ������Ļ�ø����Ӳ�ͼ����ƥ���㷨���¿��Էֳɻ���ȫ�ֵ�����ƥ���㷨�ͻ������������ƥ���㷨����[1]�� ����ͼ���п��ܴ����������ظ������� ������ �ڶ�ЧӦ�� ��ѧ�����ͶӰ��������ص�Ӱ��, ����ijһ��������Ϣʱ, ����Ҫ����������֧�֡� ���ڻ������������ƥ���㷨, ���ȷ��֧������(����)��������Ϊ�ؼ������⡣ Ȼ��, ��һ��ͼ����, ��ͬ�����ص�����Ҫ��ͬ��֧�ִ���, �Ҵ��ڴ�С����״������н�ǿ����Ӧ�ԡ�
Ϊ��, T.Kanade��M.Okutomi���������Ӧ����ģ��[2], ���ûҶȷ�����Ӳ����Ϣ�����Ӳ����Ŷ������ڴ��ڵĴ�С�� �������ڼ�����̸���, ���ڵ���״�����ڳ����δ��ڡ� ����, �Ӳ�ij�ʼ���ƶ��Ӳ���Ӱ��ϴ�
��һ���㷺Ӧ�õ��㷨�Ƕര���㷨[3]�� ����ÿһ�����ص�, �������ļ�����ͬ��״����, ������õĴ��ڱ������� ���ڼ�����̸���, ���ڼ���ĸ������ڸ�������(��10), �Ҹ���������״�ʹ�С���ܱ�֤֧�ִ��ھ��кõ���Ӧ�ԡ�
Ϊ��֤֧�ִ��ھ��кõ���Ӧ��, �������һ�ֻ�����������������Ӧ����ģ�͡� ���ڹ̶����Ӳ�d, ��̬������ÿ�����ص��֧�ִ���, �Ӷ���ò�ͬ��С�� ��ͬ��״��֧�ִ��ڡ� Ϊ�˼��ټ���ĸ��ӳ̶�, ���ù����Ӳ�������Χ�� ���Ĵ����Ӳ���ƺͶ�̬������������ļ��ּ��������� ��������(Tsukuba)��ѧ�ṩ��ͼƬ���м��顣
1 ���ڶ�̬��������
Ϊ�����Ӳ�ƥ�����Ч��, ���ȸ������ڴ��ۺ���, Ȼ����ݸú�����̬�ؽ��д���������
1.1 ���ۺ���
���������ͼ��ΪL(x, y), R(x, y)�� ��ʧһ����, �ٶ�����ƽ����x�ᡣ ��һ���ٶ�L(x, y)��R(x, y)��ͬһ����ͬһ������������ ��ͼ�� ����ƥ������edΪ:
ed=|L(x, y)-R(x-d, y)|(1)
����: d Ϊ�Ӳ�ֵ��
�������������ƥ�亯���μ�����[4]�� ���ڴ��ۺ���[5]��������:

����: SwΪ���ڴ�С, Ҳ�������ص�ĸ���; ���ͦ�Ϊ����ϵ��; ��ΪС�������Ʋ�����
ʽ(2)�еĵ�1����ָ�ڸô����е�ƽ�������ʡ� ��Ȼ, ������ڸ����Ӳ�dԽ�ӽ���ʵ�Ӳ�, ������ֵ��ԽС�� �ô��ڵĴ�СSw�������滯, ʹ�ò�ͬ��С���ڵ������пɱȽ��ԡ�
ʽ(2)�еĵ�2���Ƿ�����Ϣ, ͬ��, �����Ӳ�dԽ�ӽ���ʵ�Ӳ�, ������ֵ��ԽС�� ������Խ��ʱ, ��3���ֵ��ԽС�� ������Ϊ�ڰ�������Ϣ����, ƥ����Ӳ�����ȷ, ��ǰ��2���ֵ��ͬʱ, ��ϣ�����ýϴ�Ĵ��ڡ� ϵ����, �ºͲ����õ�ֵͨ��Ȩ�����߹�ϵͨ��ʵ�������
1.2 ��̬������������
���ڿ����, ���ȹ����Ըõ�Ϊ���ĵ���С֧�ִ��ڡ� �Թ̶��Ӳ�d����ô��ڴ��ۺ���Cd�� Ȼ��, ��ʼ��̬����������
���ڵĶ�̬����������������:
a. �Կ����Ϊԭ��, ��x��ֱ���������������������ڡ� ÿ����һ�����ص�����¼��㴰�ڴ���Cd, һ���µõ����ڴ���Cd����ǰһ�����ڴ���Cd�IJ�ֵ���ڸ�������ֵ���ߴ��ڱ߽�ֵ���ڸ��������ֵ, ��ֹͣ����, ���Ҽ�¼x��ı߽硣
b. ���ò���a.�IJ��Զ�̬����y�᷽��ĵ㡣
c. ����ÿ���������Ӳ�d�����ò���a.��b.�ķ������㶯̬���ڵĴ��ۺ���Cd�� ��������ڴ��ۺ���ֵ��С�Ķ�̬���ںͶ�Ӧ���Ӳ�d��
�䶯̬����������ͼ1��ʾ��
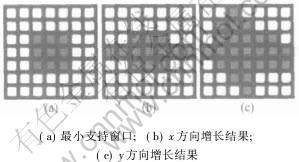
ͼ 1 ������������
Fig. 1 Process for window growing
�������ϵķ����õ���֧�ִ����ŵ���Ҫ��: ����, ��õ��Ĵ����о����ܵذ����˾�����ͬ�Ӳ�����ص�; ���, ��������������ʹ�ô��ھ����ܵĴ�, ���, �õ��Ĵ��ڲ��پ����ڼij�����, �����Զ����ɵľ����Ӳ�����Ӧ���������; ���, ���㷨����Ҫ���Ӳ���г�ʼ�Ĺ���, �Ӷ������˶Գ�ʼ�Ӳ���Ƶ������ԡ�
2 �߽籣�ֺ��ڵ����
2.1 �߽籣������
��һ�������, ����ı߽������Ӳ�仯�Ƚϴ�, �߽��һ����ǰ������, ����һ���DZ����� ��ͼ2��ʾ, �ٶ���ʱ��Ҫ������Ӳ����ĵ�ΪO, ���μ��㴰��W��dz��ɫ�����ڱ�������R1��, �Ӳ�Ϊd1�� ���ɫ������ǰ������R2��, �Ӳ�Ϊd2, �����ʱ����Ӧ���ڵ��Ӳ�ȡֵΪd2���Ѿ��������߽�, ��ô�ټ���R1�еĵ��Ȼ��������ƥ�����, ʹ����ֵ������������ֵ�� ������������㷨, ����Ӧ���ڽ����˵��߽�����, �Ӷ���֤�Ӳ�����Ӳ��һ����, Ҳ�ͱ�֤���Ӳ�߽����ȷ�ԡ�
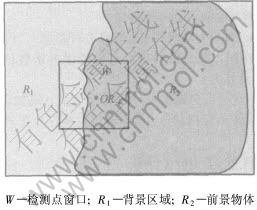
ͼ 2 �߽籣��ʾ��ͼ
Fig. 2 Schematic diagram of preserving edge
2.2 �ڵ��������
�����ڵ�����Ĵ���һֱ��������ƥ���е��ѵ����Ҫ���⡣ �ڸ��ӳ�����, ���������û��ƥ�����ڵ��㡣 Ȼ��, ���������ƥ���㷨��û�д������������ ������, һЩѧ������˳����Լ��[6-9]������ڵ�����, ����ȡ�ýϺõ�Ч���� ������ü��ƥ�亯����ֵ��С������ƥ��Ωһ��Լ��������ڵ�����
��һ�������, �����ڵ���������ƥ���������ӲΧ�ڲ��߱����ƵĹ��պ���ֵ�� ��ô, ������2�����, ��ͼ3��ʾ��
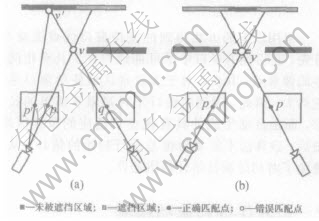
ͼ 3 �ڵ����ʾ��ͼ
Fig. 3 Schematic diagram of occlusion area
a. ����q���DZ��ڵ���, ��Ȼ��һ����ȷƥ���p����֮��Ӧ, ��ô, ���ǵ�����c(q, p��)ֵ��ȻС����ƥ����c(q, p)�� Ҳ�����ڱ����㷨�и�������ᱻ�Զ�����֪��
b. ����q���ڵ���, �����п�����һ����ƥ���pƥ��, ��ô���ݼ������ǵ�����ֵc(q, p��)��Ȼ�ϴ�
���, ��ȫ���Ӳ������ȫ֮��, ��������ֵ���ڸ�������ֵ, ��ô�Ͱ�����עΪ�ڵ��㡣
3 �㷨�Ż��ͷ���
��������Ķ�̬���ڵ��������Կ����Զ�������Ѵ�������, ��������������ʽ��ʹ�ü��㸴�ӶȺܸߡ� ���㷨��ʱ�临�Ӷ�ΪO(MNDI), ����M��N�ֱ�Ϊͼ��ĸ߶ȺͿ���, DΪ�Ӳ��������Χ, IΪ���ڵ�ƽ������������ ����, Ӧ�ӷ����㷨��ʱ�临�Ӷ�����, ��һ���о��Ľ�����, ����㷨�ļ����ٶȡ�
������, �㷨��ʱ��������Ҫ����������3������:
a. �����������ӲΧ�� ������ȿ���ȷ�������������ӲΧ, ��ô, �����Դ���ȵؼ����Ӳ������ռ䡣
b. ƥ�����Ŀ�� ͼ��Խ�������ص����Խ��, ���ƥ���Ȼ��ɾ�ļ������� ������Ч�ؼ���ƥ������, ���������ʱ����֮����;
c. ���ڶ�̬�����ķ�ʽ�� ���ڴ��ڵ����ɲ��õ������������ʽ, ��˴��ڵ������ٶȱȽ����� ���ܲ��ÿ���������ʽ, ��Ч��������ٶȡ�
3.1 �Ӳ�������Χ�Ĺ���
�����Ӳ�������Χ������, ������������ͼ����������, ���ǽ�ͼ��ֳ�R����ͼ��, ��ÿ����ͼ���������ӲΧ, �Ӷ���С�Ӳ��������Χ�� �㷨�ľ��岽����������:
a. ��������ͼ��
b. ������ͼ��ָ��R����ͼ��(P��Q)��
c. �������п������ʵ��ķ���[10]����ÿ��С����ӲΧ��
d. ������ӿ���ӲΧ��
���ȷ���ӲΧ, ������ϣ��ʹ�þ�����IJ����㡣 ������һ����С�������Ӳ���������, ���Կ��Բ��üIJ�������, ��ͼ4��ʾ��

ͼ 4 �IJ�����
Fig. 4 Simple sampling
�ֱ������ͼ���е�����, ����, ����, ����, ���µ����ص�, ������������������㷨�����Ӳ Ȼ���ҳ�����Ӳ�ֵ����С�Ӳ�ֵ, ��Ϊ��С������ӲΧ�� �����Ż�, �㷨��ʱ�临�ӶȽ�����Ϊ:
![]()
����: KΪ���������, P�� Q�ֱ�Ϊ��ͼ��ĸ߶ȺͿ���, DiΪ��i����ͼ����Ӳ�������Χ, IΪƽ�����ڵ��������������� ʵ�����, �������Ӳ�������Χ���ƺ�, �Ż��㷨��ʱ�临�Ӷȴ���Ƚ�����, ���ܱ�֤�㹻�õ��Ӳ��������
3.2 ���Ĵ��ڵ��Ӳ�ȡֵ
���Ƕ���ͼ��ÿ�����ص㶼Ҫ��ȫ�����ϲ�������Ӳ���㡣 ��Ϊ���һ�����ص�����Ӳ�ʱ, ÿ����������ʱ, �¼���ĵ㶼�Ǻ����Ĵ��ھ�����ͬ�Ӳ���������ĵ�, ���Կ���ͬʱ���´������������Ƹ��ʴ��ڸ���ֵ�����ص�, ���´����е������㲻��һһ����ƥ����㡣 ��������Ӳ���Ƶĸ���[11]:
![]()
����: kΪ�������Ӳ�����滯����; ��di, jΪ��i�͵�j֮����Ӳ��ֵ; wΪ֧�ִ��ڡ�
Ȼ��, ��ʵ��, �������Ƶĸ����Ǻ�����õ�, �������IJ�λ�Ӳ������ȷ���ʽϴ�, ����һ���Ը��º��Ĵ��ڵķ���������ƥ���������ص����� ͼ��ĺ��Ĵ��ڶ�������:
��С���Ĵ��ڼ������ij�ʼ֧�ִ���(3��3)�� ���Ĵ����ǰ�����С���Ĵ��ڵ���չ����, ��չ��Χ����������ֵ��(��š�3), ����չ�������ص�ļ��벻�����ڴ��ۺ���ֵ��
ÿ������һ�������Ĵ���, ���øÿ���������Ӳ�ֵ��Ϊ��Ӧ���Ĵ����ڵ����ص���Ӳ����ֵ�� �Ӷ�����ƥ��������� �㷨��ʱ�临�Ӷȿ��Լ��ٵ�:
![]()
����: ��Ϊ���Ĵ��ڵ�����ƽ��ֵ��
3.3 ���������Ľ�����
Ϊ��ߴ�������Ч��, ������ָĽ��Ķ�̬�������ԡ�
3.3.1 ��̬��������
�����ÿ������Ӳ�������������ڵ���Ӳ�ȷ��f(l)���Ƹ�˹�ֲ�, ���溯��Ϊg(��)��
����: �����
�ӿ������������, ϣ��̽�����ĵ�������Ӳ�ȷ��Ϊ��0(0.5����0��1), ��Ӧ���������l1Ϊg(��0)�� ͬ���������Ӳ�ȷ�ʦ�0��l1��������������, ����l1Ϊ�²ο����ȷ�ʷ���ͬ���ֲ�f(l), �������ԭʼ�ο���ķֲ�Ϊ[f(l)] 2, ���µ�̽����������Ӧ��[f(l)]2���溯�����, ��l2=g[(��0)-2]�� �������, ��λ�ê�![]() ���е�k+1������ʱ̽����������lk+1=g[(��0)-k]�� ����g(��)����������½���, �ɼ�̽����������li����i�ݼ��ġ�
���е�k+1������ʱ̽����������lk+1=g[(��0)-k]�� ����g(��)����������½���, �ɼ�̽����������li����i�ݼ��ġ�
Ϊ�˼�������, �ɹ���һ���ܳ�ַ�ӳ���������ݼ����ɵĽ��ƺ���,
lk=��kl0, 0.5���ӡ�1��(7)
��Խ��, ������Խƽ̹, ͬ��������ȷ��������̽�������Խ��, ͼ��������Խ��, ̽������������ɸ���Щ�� ������������:
a. ���쿼���(x0, y0)����С֧�ִ���, �������Ӧ�Ĵ��ۺ���ֵCd�� ������, k=0��l0�ij�ʼֵ��
b. ��ԭ���ڱ߽����������lk�����ص��, �ټ����µĴ��ۺ���Cd��, ��������ۺ���ֵ�仯��С�ڸ�����ֵ, ����ۺ���ֵ����ΪCd��, �µĴ��ڱ߽�Ϊ�����ı߽�, k��1, ��������b, ֱ�����ڱ߽���ڸ���ֵ; ����, ת����c��
c. �˻ص�k-1��ʱ�Ĵ��ڱ߽�, ���õ�������������ʽ, ֱ�����ۺ���ֵ�仯�����ڸ�����ֵ��
d. �Դ���������y=y0�ĵ�, ��ͬ��������y�᷽����ж�̬������ �����������Ӧ���ڡ�
����������ʽ���, ��̽�IJ�����������, ����˴��������ٶȡ� �㷨ʱ�临�Ӷȼ��ٵ�:
![]()
����: IrΪ�µ�ƽ������������
�ڿ�����֧�ִ��ھ�����С֧�ִ��ڵļ��������, �ò��Ի�����8��(l0-4)�δ��ۺ������㡣 ������������������ĸ����൱С, ͨ��֧�ִ��ڵĴ�С����25�����ص�����(����1)�� ��3��l0��6ʱ, �ò��Եļ���ʱ�������������١�
�� 1 ƽ�����ڴ�С
Table 1 Average size of windows
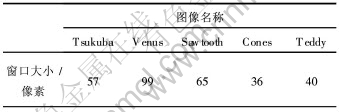
�ɱ�1��֪, ����(Tsukuba)��ѧ��5������ƥ��ͼƬ����õ���ƽ��֧�ִ��ڴ�С��
3.3.2 ��ԵԼ������
ͬһ���������ĻҶ�������ͼ������һ�µ�, �����������ӵĵ������ͬһ�������������, ��ʽ(2)������ۺ������������Ա仯, ��ô��û��Ҫ�ԻҶȲ��С�ĵ���м��㡣
��ͬ����֮�����п��ܴ�����Ȳ���, ����������֮�������������Եķֽ��ߡ� ���, ͼ���еı�Ե���Ǽ���Ӳ���ص�, �������ñ�Ե��Ϣ����ߴ����������ٶȡ� ������������:
a. ���ð˷��������ӻ�ȡͼ��ı�Ե��Ϣ�Ҽ�¼������Ϣ[12]��
b. ��������һ��������������߽紦(��������ڱ߽�), ������������ˮƽ�߽�, ��������������ֱ�߽硣
c. ������ۺ���, ������ۺ���ֵ�仯��С�ڸ�����ֵ������չ���ڱ߽硣 ����, ������չ�������������ԡ�
��ô�㷨ʱ�临�Ӷȿ��Լ��ٵ�:
����: ��1��Ϊ��Ե������ĵ�ʱ��; RΪ��Ե�����ģ��С; Ir��Ϊ�µĴ���ƽ������������
4 ʵ����
��Window2000ƽ̨����VC6.0����ʵ������, �ֱ�ʵ���˱�����������������㷨, �Լ���̬������ �߽�Լ���㷨�� ʵ����ȡ���Ϊ31�� 31, ��С����Ϊ3��3�� ����������ֵ��ͬ�������, ����Ƚϴ��ڴ�С, ����ƽ�����ͷ���������������塣 ��ȡ��=1.2, ��=1.0, ��=-2�� �ڶ�̬�����㷨Ϊ��Ҫ���һ�������IJ���һ���ڸ����ĵ��Ӳ�������Χ��, ͬʱ�����IJ������ڵ�������, ����ȡ��=0.6, l0=5�� �ӲΧΪ0~16, ��Ϊ�Ƚϲο�, ͬʱ������[2]���������Ӧ���ں�����[3]����Ķര���㷨���г���ʵ��, ��ͼ5��ʾ��
��ͼ5(f)�п��Կ���, ֧�ִ��ڵ���״��������Ӧ���ص㡣 ͼ5(g)~(j)�����3���㷨�ڱ߽������õ��Ӳ��ͼ5(c)~(e)���㷨��Ϊȷ��
�����Ӳ�ͼ�����ȷ��, �����������[13]����Ĵ����ⷽ��������ʵ������ȷ�̶ȡ� �����Ӳ�����ʺ���B[13]����ȷ��A:
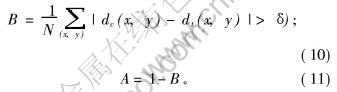
ʽ��: dcΪ����õ����Ӳ�ֵ, dtΪ��ʵ�Ӳ�ͼ���Ӳ�ֵ, ��Ϊ��������ֵ, ����ȡ��=1.0��
�� 2 �������Ӳ���ȷ��
Table 2 Accuracy of different algorithm
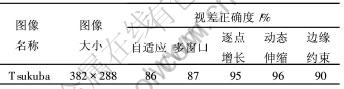
�ӱ�2���Կ���, ���������3���㷨���Ӳ����ȷ�ȶ���������Ӧ���ںͶര���㷨�� ��̬�����Ľ������������������㷨�Ľ��, ������ԭ������Dz������Ӳ��������ɵľֲ��Ӳ�һ�µ�ԭ��
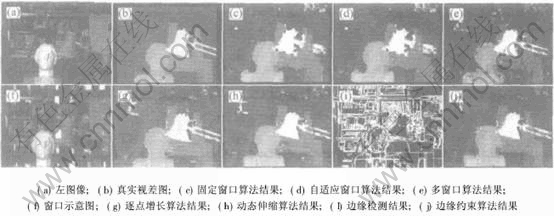
ͼ 5 ���еĸ����㷨�ͱ����㷨���Ӳ���ͼ��
Fig. 5 Disparity results of existing algorithms and presented algorithms
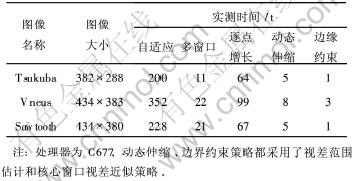
��������������㷨���, ���ö�̬�����㷨�ͱ�ԵԼ���㷨�Ĵ�������������������˼����ٶ�(����3), ������Ӧ���ںͶര���㷨��ȼ����ٶȽϿ졣
�� 3 ������ʵ�����ʱ��
Table 3 Time consumption of different algorithm
5 �� ��
a. ������Ӧ֧�ִ���ѡ������,���һ���µĶ�̬�����㷨,�������������ƥ���Ӳ�����й���֧�ִ����Զ����ɵĹؼ��������⡣���������㷨���Զ�̬����������̬�ʹ�С,�õ�������ͼ���ʵ���Ӳ�����Ӧ��֧�ִ���,�Ӷ���Ч�ؿ˷��˴�ͳ��������ƥ���㷨�д��ڲ��ɵ��ڶ���ɵ��Ӳ���ƾ��Ȳ��ߵ����㡣
b. Ϊ�˽���֧�ִ����Զ������㷨�ļ��㸴�Ӷ�,��һ�������С�Ӳ�������Χ�����Ĵ����Ӳ����ȡֵ����̬���������������ࡢ���ñ�Ե��ϢԼ�����������ȸĽ�����ʹ���㷨�����Ż�������������,����������㷨�Ͳ����봫ͳ�����Ա�,�����㷨���Ӳ���㾫ȷ�ȸߡ��ܴ���Ƚ���ʱ�临�Ӷȵ��ŵ㡣�ر��ʺ��������Ӿ�ʵʱ�Ժ��Ӳ�ȷ��Ҫ��ߵ�Ӧ�ó���,�������˫Ŀ�Ӿ�������̽���ܱ������ǰ��������Ϣ;�����̽��������ܱ߶�������Ӿ�ͼ����Ϣ���ж�λ�Ͳ��١�
c. ������ı߽�Լ���㷨��ָ�����ڵ������ۺ��˱�Ե��������Ϣ�ںϵ��ŵ�,�����IJ���֮�����ڽ���������������,ֱ������ͼ���Ե�����,��߽�����϶�,�Ӳ��������ë�̡����,Ҫ������������,��Ҫ���õı�Ե�㷨���Ե��������ж����Զ����Ӵ�����
�����:
[1]Anandan P. A computational framework and an algorithm for the measurement of visual motion[J]. International Journal of Computer Vision, 1989, 2(3): 283-310.
[2]Kanade T, Okutomi M. A stereo matching algorithm with an adaptive window: Theory and experiment[J]. IEEE Trans on Pattern Analysis and Machine Intelligence, 1994, 16(9): 920-932.
[3]Fusiello A, Roberto V. Efficient stereo with multiple windowing[A]. IEEE Conference on Computer Vision and Pattern Recognition[C]. San Juan, 1997: 858-863.
[4]Shimizu M, Okutomi M. Precise sub-pixel estimation on area-based matching[A]. 8th International Conference on Computer Vision[C]. Vancouver, 2001: 90-97.
[5]Veksler O. Fast variable window for stereo correspondence using integral images[A]. IEEE Computer Society Conference on Computer Vision and Pattern Recognition[C]. Madison, 2003: 556-561.
[6]Intille S, Bobick A. Disparity-space images and large occlusion stereo[A]. European Conference on ComputerVision[C]. Stockholm, 1994: 179-186.
[7]Belhumeur P N. A bayesian-approach to binocular stereopsis[J]. Computer Vision, 1996, 19(3): 237-260.
[8]Intille S, Bobick A. Incorporating intensity edges in the recovery of occlusion regions[A]. International Conference on Pattern Recognition[C]. Jerusalem, 1994: 674-677.
[9]Fua P. A parallel stereo algorithm that produces dense depth maps and preserves image features[J]. Machine Vision and Applications, 1993, 69(1): 35-49.
[10]SUN Chang-ming. Fast stereo matching using rectangular subregioning and 3D maximum-surface techniques[J]. International Journal of Computer Vision, 2002, 47(3): 99-117.
[11]Belhumeur P N. A bayesian-approach to binocular stereopsis[J]. International Journal of Compute Vision, 1996, 19(3): 237-260.
[12]������, ɳɯ, ���ҫ, ��. ��������������ϵͳ�о�[J]. С���ͼ����ϵͳ, 2004, 25(4): 671-675.
LUO San-ding, SHA Sha, SHEN De-yao, et al. On-line visual counting system for production of steel bar[J]. Mini- Micro Systems, 2004, 25(4): 671-675.
[13]Scharstein D, Szeliski R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms[J]. International Journal of Computer Vision, 2002, 47(1): 7-42.
�ո�����:2005-03-01
������Ŀ: ���ʺ��������о�������ʮ�塱����������Ŀ(DY-105-03-02-06)
�����: ������(1955-), ��, ���������, ����, ����ͼ������ ��ý�弼���� ������Ϣ�����о�
������ϵ��: ������, ��, ����; �绰: 0731-8830982(O); E-mail: sdluo@mail.csu.edu.cn
ժҪ: ��Ի������������ƥ���㷨֧�ִ�������ѡ�������, ���һ���µ�����Ӧ������������ƥ���㷨�� �����������ķ������Զ�̬�ػ����״�ʹ�С����������Ӧ���Ե�֧�ִ���, ��ͨ�������ӲΧ���ơ� ���Ĵ����Ӳ���ơ� ��̬������������ȷ���ʹ�㷨�õ��Ľ��� �о��������: ���㷨�����Ӳ�������ڵ������������õ���Ӧ��; ���ø��㷨��õ��Ӳ�ͼ���ȷ�ȸߴ�95%, �Ҽ���ʱ�����̵�5 s���ڡ�
