
DOI: 10.11817/j.issn.1672-7207.2018.11.010
�˵�ˮ��ˮ�º���ROV������̬��ѧ����
��ս��1���ս���1������1�����2������1������ȫ1
(1. ��������ҵ��ѧ ���繤��ѧԺ�������� ��������150080��
2. ���ݴ�ѧ ��е���̼��Զ���ѧԺ������ ���ݣ�350001)
ժ Ҫ��
װ�õ�����ˮ�»�����(ROV)���������ִ��ڿ����С����ִ���ˮ�µ�������̬��ѧģ�ͣ������ַ�������ʽ��ģ���������ת��Ϊ��ʼֵ������⣬����ROV������֮�����ӵ��״ֵ̬Ϊ��ʼֵ��ͨ���Ľ�����-�����㷨���õ�ROV�˶��ٶȡ�ˮ�������ˮ�Ǻ����³��ȵ����������µ�������������������������ص���̬��ѧ����֮��ı仯���ɡ��о��������������������ķ��������������������ض�ROV��̬�˶���Ӱ�죬���ܹ�Ϊ�Ľ�ROV����ƺͿ��Ʋ����ṩ�ο���
�ؼ��ʣ�
����ˮ�»��������˷�Ӧˮ������̬�˶�����������
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2018)11-2709-07
Steady-state mechanical characteristics of cable for an underwater welding ROV for nuclear reaction pool
LI Zhandong1, TAO Jianguo1, LUO Yang1, SUN Hao2, DING Liang1, DENG Zongquan1
(1. School of Mechanics Engineering, Harbin Institute of Technology, Harbin 150080, China;
2. School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 3500001, China)
Abstract: Remotely operated vehicle (ROV) with a weld device was designed. A steady-state theoretical model of a cable partially in reaction pool water and partially in air was constructed. The problem of solving an ordinary differential equation (ODE) set was considered as the problem of solving the initial value problem based on the state value of connection point between the vehicle and cable. The change rules between various factors (i.e., velocity, water depth, entry water angle, water density and cable length) and the steady-state mechanical characteristic (i.e. tension, normal shear force and bi-normal moment) was obtained by the fourth order Runge-Kutta method. The results show that the proposed method can be used to evaluate the effect of various factors on ROV steady-state motion, and provide reference for the improvement of the design and control strategy of ROV.
Key words: remotely operated vehicle (ROV); nuclear reaction pool; steady-state motion; cable force
��2011�긣�����¹ʷ����������˰�ȫ�ѳ�Ϊȫ����Ŀ������[1-3]���˵�ˮ����Ϊ�˵糧�ĺ��IJ��֣����Ƿ������ֺ�ʱ��Ԯ���ص�������Ϊһ�����˲���������ˮ�»����˹㷺Ӧ���ں���̽[4]������ò����[5]����ɿ�[6]�ͺ��۲�[7]�ȷ��档Ȼ����Ŀǰ����ˮ�º��ӻ�����Ӧ���ں˵�ˮ�ص��о����٣���Ҫ������ʵ�黷����Σ�գ��з����ڽϳ�����ֵ����ģ�ⷽ����������������Ч�ʺͻ�е���ܣ������ܹ���������ˮ�»�����(ROV)�з������ڡ�ROV�ں˵�ˮ���к�����ҵʱ����Ҫ��β������Ϊ����ϵͳ�ͺ���װ�ù��磬��������ֱ���ϴ���ROV֮������������ROV���˶�����ҵ�ľ�ȷ�Ժ��ȶ��Բ����ϴ�Ӱ�죬��ˣ��б�Ҫ���������µ���ѧ����չ���о�����ǰ������������˶��������ѧģ�͡�WALTON ��[8]ͨ�������������������������Ķ���ѧ���̣�ABLOW��[9]ͨ������ַ������ˮ�����µĶ���ѧ���̣�MILINAZZO��[10]����˻���Ablow���۵�������ѧģ�Ľ��㷨����֤�����㷨������Ч�����Ч�ʣ�CHIOU��[11]�����һ��ֱ���㷨�����ֲ�����ϵ�µ�����Ԫ���Ʒ����������ת��Ϊ�����ֵ���⣬��ͨ��ţ��-����ѷ������������⡣Ȼ���������о����������µĶ�̬��ѧ���Է�������û�ж����µ���̬��ѧ���Խ��з���������ˮ�º���ROV���������ȶ�����״̬(���ӻ�Ѳ��)����ˣ�Ӧ���о�����̬�µ�������ѧ���⡣DE ZOYSA[12]����������ˮ�����µ���άƽ�ⷽ�̣�FRISWELL[13]ͨ����з����������[12]�������������̬���̣�LEECH��[14]�����һ��ˮ�����µ���ѧģ�ͣ�ͨ������ʵ���˶�ά��̬�µ����¿ռ���״�������ֲ����о������ɵ�[15-16]����̬����ѧ�����������ת���������ֵ���⣬��ͨ�����ַ�ʵ����⡣��Ȼ��Щ�о������ijЩ����ROV����̬�˶�ʱ��������ѧ���⣬����ЩROV���Ӧ���ں���(����ˮ��)�������е����³�����ˮ�е����³���֮��ı�����С�������³�ϸ�Ƚϴ��⣬��ͬһ����ͬһ����»�������(���纣ˮ�ܶȡ��¶ȵ�)�������䣬��ˣ����ʱ仯��������̬��ѧ���ܵ�Ӱ�챻���ԣ���������̬��ѧģ����Ҳδ���Ǵ�ij�ϸ���������غͼ�������ͬʱ��Ҳ��Ҫ�о��������ض�������̬��ѧ���ܵ�Ӱ�졣�����ˮ�º���ROV�����У��������߲�����ֵģ�ⷽ����Ԥ��ͼ��������β�����µ���̬��ѧ���ԣ����ȣ����ڲ������ڿ����кͲ�������ˮ�е����£��������ַ�������ʽ����̬��ѧģ�ͣ���Σ�����ⳣ�ַ���������ת��Ϊ��ʼֵ���⣬���Ի����˺�����֮�����ӵ��״ֵ̬Ϊ������ij�ʼֵ��ͨ���Ľ�����-�����㷨ʵ����⣻���ͨ���÷���������������(�������ٶȡ�ˮ���ˮ�ǶȺ����³���)��������̬��ѧ���Ե�Ӱ�졣
1 ROV������װ�ü��
�������������һ����ʽROV��������Ӧ��״̬�µĺ˵�ˮ�صĺ��������ճ�״̬�µ�ˮ��Ѳ�顣ROV����ṹ�������1��ʾ��
��1 ROV�ṹ����
Table 1 Structure parameters of ROV

ROVϵͳ�ɻ����˱��塢2�����Ʋա�8���ƽ�����β�����ºͽ��̳�����ɡ�Ϊ��ʹ�ṹ���գ�������ҵװ�����ڻ����ڲ������²����е������źŵ�������ҪΪ�������ҵװ�ù��磬��ˣ�����ֱ���볤��֮��ıȼ�������Զ���ں���ROV���µij����ȡ��������⻤�ס���װ���ڻ��ס������ס���Ե��Ͳ������[17]�����ź��ջ��ɽ��̳���ɡ�
2 ������ѧģ��
ͼ1��ʾΪ������ѧģ���й̶�����ϵ�;ֲ�����ϵʾ��ͼ(����hΪ��ˮ�߶�)��Ϊ�˱�֤�˵�վ�İ�ȫ�������ڴ�ֱ������ˮ��ˮ����ذ�֮����ڰ�ȫ���롣��ˣ����±���2�����ּ�ˮ�����²���l1��ˮ�����ϲ���l2��������ˮ��֮��Ľ���P����Ϊ��ˮ�㣬��ˮ�㴦������������ˮ��ļнDZ���Ϊ��ˮ�� ��������ϵOxyzԭ��̶���ˮ���ϣ��������Ͻ����ֲ�����ϵb-t-n������t��Ϊ����ķ���nΪ���߷��������ֶ����֪bΪ��������
��������ϵOxyzԭ��̶���ˮ���ϣ��������Ͻ����ֲ�����ϵb-t-n������t��Ϊ����ķ���nΪ���߷��������ֶ����֪bΪ��������
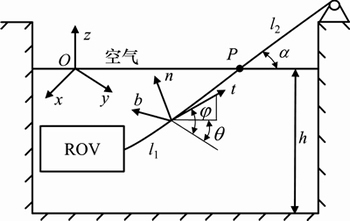
ͼ1 �̶�����ϵ�;ֲ�����ϵʾ��ͼ
Fig. 1 Diagram of the fixed coordinate system and local coordinate system
���µ���̬��ŷ���ǦȺͦձ�ʾ����������������xOy���ͶӰ��y��֮��ļнǦȱ���Ϊ��λ�ǣ�������xOy��ļнǦձ���Ϊ̧���ǣ�ROV���������ӵ㱻��Ϊ�����¶˵㣬���̳����������ӵ㱻��Ϊ�����϶˵㡣
��������l1��l2�������ʲ�ͬ��Ҫ�ֱ�����ͬ����̬��ѧģ�ͣ����Ƕ��߽�ģ�������ơ�����������l1Ϊ����˵��������̬��ѧģ�͵Ľ����������뺣���е�������ȣ��˵�ˮ���е����³�ϸ�ȸ������ܵ���������������Χ����������������ͷ�����������ã������ܵ������������á���������ģ����ͼ2��ʾ��
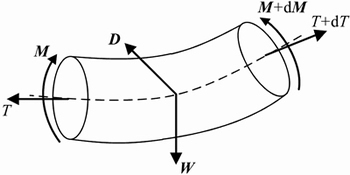
ͼ2 ��������ģ��
Fig. 2 Force model of a cable
��̬�µ�����ƽ�ⷽ�̿��Ա�ʾΪ
 (1)
(1)
ʽ�У� Ϊ����������F�Կռ仡��s���֣�F=(T, Sb, Sn) (����TΪ���µ�������SbΪ���������������SnΪ���߷��������)��GΪ��������������BΪ����������D0Ϊ�����ܵ���������������
Ϊ����������F�Կռ仡��s���֣�F=(T, Sb, Sn) (����TΪ���µ�������SbΪ���������������SnΪ���߷��������)��GΪ��������������BΪ����������D0Ϊ�����ܵ���������������
���������븡���ĺ�������Ϊ�ָ�������W�������ʽΪ
 (2)
(2)
�ھֲ�����ϵ�£�������������D���Ա�ʾΪ
 (3)
(3)
ʽ�У�ut��ub��un�ֱ�Ϊ������������ͷ����ٶȣ�Ct��Cb��Cn�ֱ�Ϊ���µ�����ϵ����������ϵ���ͷ���ϵ����dΪ���µ�ֱ������Ϊ�����ܶȣ���Ϊ���µ�Ӧ�䣬��������֮��Ĺ�ϵ�ɱ�ʾΪ��=T/(EA) (����EΪ���µĵ���ģ����AΪ���½������)��
�ھֲ�����ϵ�£�������F���ڿռ���ֱ���ʽΪ
 (4)
(4)
ʽ�У�������Ϊ�ھֲ�����ϵ������s�������ʡ������뷽λ��֮��Ĺ�ϵ���£�
 (5)
(5)
ʽ�У���b�ͦ�n�ֱ�Ϊ���������ʺͷ������ʡ�
��ʽ(2)��(3)��(4)����ʽ(1)���ֱ�õ��ھֲ�����ϵ�·���t��b��n�Ŀ��Ʒ��̣�
 (6)
(6)
ʽ�У�gΪ�������ٶȡ�
��������Ԫ�ε�����ƽ�ⷽ�̣���ȥ�߽�����С���֣����տ��Եõ�
 (7)
(7)
ʽ�У�MbΪ���������أ�MnΪ�������أ�IΪ����Ԫ�εĹ��Ծء�
���ݾֲ�����ϵ��̶�����ϵ֮��ı任��ϵ���ɵõ�
 (8)
(8)
ʽ�У�x��y��z�ֱ�Ϊ����Ԫ�ڹ̶�����ϵ�µ�����ֵ��
ˮ�����ϲ������ߵ���̬��ѧģ����ˮ�����²������߽�ģ�������ƣ���֮ͬ�������������ʵ��ܶȲ�ͬ��
ʽ(5)~(8)�����������̬���Ʒ����飬�����δ֪��ΪT��Sb��Sn��Mb��Mn��x��y��z���Ⱥͦա����������������鱾���������������������Ҫ���ӳ�ʼ���������������¶˵������ijһλ�õ�״ֵ̬�������ַ�������������ת��Ϊ��ʼֵ���⡣��ˣ�������¶˵����ijһλ��״ֵ̬��Ϊ�������Ĺؼ�������ˮ�²������£�������ʼ����ROV������ͨ��ROV�˶�������ӵ�״ֵ̬���ɵõ�������̬�µij�ʼֵ��ͨ���̶�����ϵ��ֲ�����ϵ֮��任�����Եõ��������¶˵㴦�ij�ʼֵ��
 (9)
(9)
ʽ�У�Fx��Fy��Fz�ֱ�Ϊ������ROV������������ͨ��CFD����������[18-22]��T0��Sb0��Sn0�ֱ�Ϊ���������������ͷ������ij�ʼֵ������dz�ʼֵ��0����ROV�˶�������y��֮��нǣ�̧���dz�ʼֵ��0ʼ�յ���������ˮ����������ROV֮��ͨ���������ӣ���ˣ����������س�ʼֵMb0=0 N��m���������س�ʼֵMn0=0 N��m��
l2������ͨ����ˮ��P��l1���������ӣ��������ϣ�����P��l1���϶˵㣬����l2���¶˵㡣ͨ��������Ի�õ�P��״ֵ̬��Ȼ����״ֵ̬��Ϊl2�����¿��Ʒ�����ij�ʼֵ��
3 ������ѧ����
һ����ҵ��������ROV��̬����ɣ���������T������������Sn����������Mb�ǿ���������̬�˶����Ե���Ҫָ�꣬������ROV���˶��ٶȡ���ˮ��ȡ�������ˮ�Ǻ����߳��ȵ������������й�ϵ��ROV��y��ֱ���˶�����ˣ�����Ǧ�0�趨Ϊ0�㡣����̳��ڰ��ϵ�λ�� �����µ������������2��ʾ��
�����µ������������2��ʾ��
��2 ������������
Table 2 Physical parameters of cable
3.1 �ٶȶ�������ѧ���Ե�Ӱ��
ͨ��CFD���Լ���������˶�ʱROV���ܵ����������ӵ��״ֵ̬����ʽ(9)����õ�������ROV�˶��ٶȷֱ��趨Ϊ0.1��0.2��0.3��0.4 m/s(��y�᷽��)�������������£���ˮ�߶�Ϊ20 m����ˮ��Ϊ30�㣬���³���Ϊ30 m��ͨ��������Եõ���ͬ�ٶ��µ���������T�����������Sn����������Mb���˶��ٶȶ�������̬��ѧ����(�����������������������������)��Ӱ����ͼ3��ʾ��
ͼ3 �˶��ٶȶ�������̬��ѧ����Ӱ��
Fig. 3 Influence of velocity on steady-state mechanical characteristics of cable
��ͼ3(a)��֪������ROV�ٶ����ӣ�������ͬһλ���ϵ�����T�������ӣ�ͬһ�ٶ���ˮ�в��ֻ��ǿ��������»��������������Թ�ϵ����ͼ3(b)�ɼ�����Ȼ������Sn�ij�ʼֵ����ROV�ٶ����Ӷ���С�����϶˵���������������ٶ�Ӱ�졣��ͼ3(c)���Կ��������»����븱��������Mb֮��������߹�ϵ���������ӣ�Mb��С����ˮ�㴦�������ޱ仯��
3.2 ˮ���������ѧ���Ե�Ӱ��
���ź�ȼ�ϰ��ڳ�����ȴ��ˮ�����ߣ�ˮ�������ٶȼӿ죬����ʹ��ˮ����½������յ���l1��С��l2���ӡ���ROV���˶��ٶ�v=0.2 m/s����ˮ�߶ȷֱ���Ϊ16��18��20��21 mʱ��������̬��ѧ���Լ�������ͼ4��ʾ��

ͼ4 ��ˮ�߶ȶ�������̬��ѧ����Ӱ��
Fig. 4 Influence of water depth on steady-state mechanical characteristics of cable
��ͼ4(a)���Կ��������ų�ˮ�߶��½����϶˵�����T��֮���ӣ�ʼ�մ���ˮ�е����¸���������Ӱ�졣��ͼ4(b)���Կ��������ų�ˮ�߶��½������ڿ��������߸��㷨�������Sn�������ӣ�Sn�仯�����������仯�������ơ���ͼ4(c)��֪�����»����븱��������Mb֮������߹�ϵ����ˮ�߶�ԽС���϶˵�ĸ���������Խ��
3.3 ������ˮ�Ƕ�������ѧ���Ե�Ӱ��
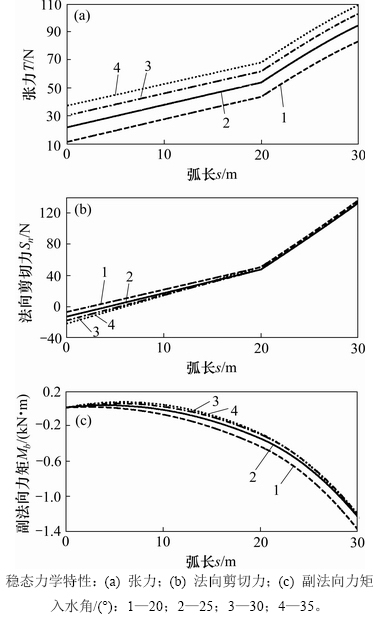
��ˮ�DZ仯���ı�ROV�ڳ���λ�ã�����l1��l2�ij��ȱ仯����ˮ��λ�ñ仯������ˮ�Ƿֱ���Ϊ20�㣬25�㣬30���35�㣬ROV���ٶ�Ϊ0.2 m/s����ˮ�߶�Ϊ20 mʱ����ˮ�Ƕ�������̬��ѧ���ܵ�Ӱ����ͼ5��ʾ��

ͼ5 ��ˮ�Ƕ�������̬��ѧ����Ӱ��
Fig. 5 Influence of water entry angle on steady-state mechanical characteristics of cable
��ͼ5(a)���Կ�����������ˮ�Ƕ����ӣ��϶˵������T�������ӣ�l1���ֺ�l2���ֵĻ��������������Ա仯����ͼ5(b)�ɼ�������ˮ�Ƕȴ�20��仯��40��ʱ����������ͬλ�õķ��������Sn��С����ͼ5(c)�ɼ�����ͬλ���ϵĸ���������Mb���ŽǶȵ����Ӷ���С��
3.4 ���³��ȶ�������ѧ���Ե�Ӱ��
��ROV�����˶�ʱ�����µij�������̳����շŶ��ı䣬��ˮ�Ƕ���l1��l2Ҳ����֮�ı䡣�˴�ROV�ٶ�Ϊ0.2 m/s(��y�᷽��)������ʱ���ӳ������³������ӣ������϶˵������T�����������Sn����������Mb�仯��ͼ6��ʾ��
��ͼ6(a)���Կ���������ʱ���ӳ������³������ӣ��϶�����T�����Լ�С������С���ȷdz�С����ͼ6(b)���Կ������������³������ӣ����������Sn���������ӡ���ͼ6(c)���Կ������������³������ӣ�����������Mb���������������ƣ����������ȴ�

ͼ6 ���³��ȶ�������̬��ѧ���Ե�Ӱ��
Fig. 6 Influence of cable length on steady-state mechanical characteristics of cable
4 ����
1) ��ROV(����ˮ�»�����)�˶��ٶȴ�0.1 m/s���ӵ�0.4 m/s(��y�᷽��)ʱ�������϶˵�������ͷ���������ֱ�����35%��5%�����϶˵�ĸ��������ؼ�С10%������ˮ�߶ȴ�21 m����16 m�������϶˵����������������������������Լ40%����������ˮ�Ƕȴ�20�����ӵ�40��ʱ���϶˵������������43%������������������������طֱ��С��38%��50%����������y����0.2 m/s�ٶ��˶�20 s���϶˵������������3%�����������������15%��������������������32%��
2) ���ĵ��о���������������ROV�˶��ٶȡ�ˮ���ˮ�Ƕȡ����³��ȵ����ض�ROV��̬�˶���Ӱ�죬��Ϊ�Ľ�ROV��ƺͿ���������ṩ�ο���
�ο����ף�
[1] ZHENG Jie, TAGAMI K, UCHIDA S. Release of plutonium isotopes into the environment from the Fukushima Daiichi nuclear power plant accident: what is known and what needs to be known[J]. Environmental Science & Technology, 2013, 47(17): 9584-9595.
[2] ALEKSANDRA C. Revisiting the convention on nuclear safety: lessons learned from the Fukushima accident[J]. Asian Journal of International Law, 2013, 3(2): 365-391.
[3] HACHIYA M, AKASHI M. Lessons learned from the accident at the Fukushima Daiichi nuclear power plant��more than basic knowledge: education and its effects improve the preparedness and response to radiation emergency[J]. Radiation Protection Dosimetry, 2016, 171(1): 27-31.
[4] RAMADASS G A, RAMESH S, SELVAKUMAR J M, et al. Deep-ocean exploration using remotely operated vehicle at gas hydrate site in Krishna-Godavari basin, Bay of Bengal[J]. Current Science, 2010, 99(6): 809-815.
[5] SALGADO J T, GONZALEZ J L, MARTINEZ L F, et al. Deep water ROV design for the Mexican oil industry[C]// Oceans��10 IEEE Sydney Conference and Exhibition. Sydney, Australia: IEEE, 2010: 1-6.
[6] PARK S J, YEU T K, YOON S M, et al. A study of sweeping coverage path planning method for deep-sea manganese nodule mining robot[C]// OCEANS'11 MTS/IEEE Kona. Hawaii, America: IEEE, 2011: 1-5.
[7] VEDACHALAM N, RAMESH S, SUBRAMANIAN A N, et al. Design and development of remotely operated vehicle for shallow waters and polar research[C]// 2015 IEEE Underwater Technology. Chennai, India: IEEE, 2015: 1-5.
[8] WALTON T S, POLACHECH H. Calculation of transient motion of submerged cables[J]. Mathematics of Computation, 1960, 14(69): 27-46.
[9] ABLOW C M, SCHECHTER S. Numerical simulation of undersea cable dynamics[J]. Ocean Engineering, 1983, 10(6): 443-457.
[10] MILINAZZO F, WILKIE M, LATCHMAN S A. An efficient algorithm for simulating the dynamics of towed cable systems[J]. Ocean Engineering, 1987, 14(6): 513-526.
[11] CHIOU R B. Nonlinear hydrodynamic response of curved singly-connected cables[D]. Corvallis, USA: Oregon State University. College of Engineering, 1989: 32-41.
[12] DE Zoysa A P K. Steady-state analysis of undersea cables[J]. Ocean Engineering, 1978, 5(3): 209-223.
[13] FRISWELL M I. Steady-state analysis of underwater cables[J]. Journal of Waterway Port Coastal & Ocean Engineering, 1995, 121(2): 98-104.
[14] LEECH C M, TABARROK B. The cable geometry for a towed submersible[J]. International Journal of Mechanics Science, 1995, 37(10): 1079-1087.
[15] ����. ����̽��ҷϵͳ�˶���������Ƽ����о�[D]. �Ϻ�: �Ϻ���ͨ��ѧ���������뽨������ѧԺ, 2006: 16-21.
WANG Fei. Motion simulation and simulation of towing system for ocean exploration[D]. Shanghai: Shanghai Jiaotong University. School of Naval Architecture, Ocean& Civil Engineering, 2006: 16-21.
[16] WANG Fei, HUANG Guoliang. Steady state analysis of towed marine cables[J]. Journal of Shanghai Jiaotong University, 2008, 13(2): 239-244.
[17] ¬����. ˮ������ϵͳ����µĽṹ�������֤[D]. ����: ����������ѧ������ѧϵ, 2013: 20-25.
LU Qingzhen. Structural design and validation of umbilical of subsea production system[D]. Dalian: Dalian University of Technology. Department of Engineering Mechanics, 2013: 20-25.
[18] JAGADEESH P, MURALI K, IDICHANDY V G. Experimental investigation of hydrodynamic force coefficients over AUV hull form[J]. Ocean Engineering, 2009, 36(1): 113-118.
[19] ZHANG Jiantao, MAXWELL J A, GERBER A G, et al. Simulation of the flow over axisymmetric submarine hulls in steady turning[J]. Ocean Engineering, 2013, 57(1): 180-196.
[20] PRAVEEN P C, KRISHNANKUTTY P. Study on the effect of body length on the hydrodynamic performance of an axi- symmetric underwater vehicle[J]. Indian Journal of Geo-Marine Sciences, 2013, 42(8): 1013-1022.
[21] Xu S J, Han D F, Ma Q W. Hydrodynamic forces and moments acting on a remotely operate vehicle with an asymmetric shape moving in a vertical plane[J]. European Journal of Mechanics, 2015, 54: 1-9.
[22] Wang Chuanfeng, Zhang Fumin, Schaefer D. Dynamic modeling of an autonomous underwater vehicle[J]. Journal of Marine Science and Technology, 2015, 20(2): 199-212.
(�༭ �����)
�ո����ڣ�2017-12-20�������ڣ�2018-02-01
������Ŀ(Foundation item)�������ص�����о���չ�滮(973�ƻ�)��Ŀ(2013CB035502)��������Ȼ��ѧ����������Ŀ(61673138) (Project (2013CB035502) supported by the National Basic Research Development Program(973 Program) of China; Project(61673138) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��ս�������ʿ�����ڣ��������ֻ����˼����о���E-mail: jgtao@hit.edu.cn
ժҪ����ƴ����к���װ�õ�����ˮ�»�����(ROV)���������ִ��ڿ����С����ִ���ˮ�µ�������̬��ѧģ�ͣ������ַ�������ʽ��ģ���������ת��Ϊ��ʼֵ������⣬����ROV������֮�����ӵ��״ֵ̬Ϊ��ʼֵ��ͨ���Ľ�����-�����㷨���õ�ROV�˶��ٶȡ�ˮ�������ˮ�Ǻ����³��ȵ����������µ�������������������������ص���̬��ѧ����֮��ı仯���ɡ��о��������������������ķ��������������������ض�ROV��̬�˶���Ӱ�죬���ܹ�Ϊ�Ľ�ROV����ƺͿ��Ʋ����ṩ�ο���
